前言
学习笔记,仅供学习,不做商用,如有侵权,联系我删除即可
一、主要目标
1.理解回环检测的必要性。
2.掌握基于词袋的外观式回环检测。
3.通过DBoW3的实验,学习词袋模型的实际用途。
二、概述
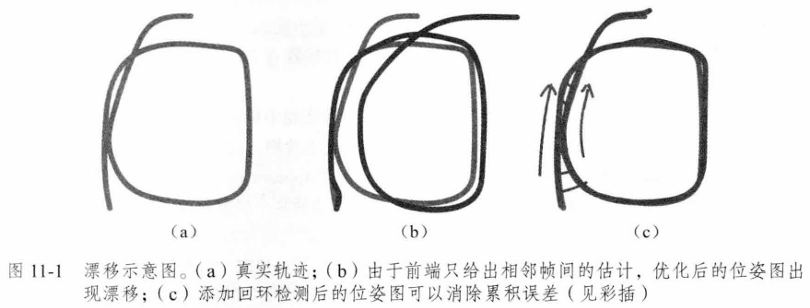
VO存在误差累积,会使得SLAM出现累计误差,长期估计的结果会不可靠,无法构建全局一致的轨迹和地图,回环检测就可以消除累计误差。
2.1 回环检测的方法
两种思路:基于里程计的几何关系,或基于外观的几何关系。基于里程计的方法由于存在累计误差,存在因果倒置的问题,所以基本无法使用,基本上用的都是基于外观的方法。
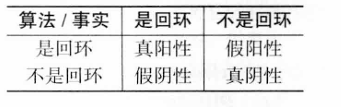
2.2 准确率和召回率
![]()
三、词袋模型
词袋(Bag-of-Words, BoW):建立一个词典(Dictionary),然后把图像向量化,进而比较相似程度。
词典的构建可以用K-means的方法进行分析。
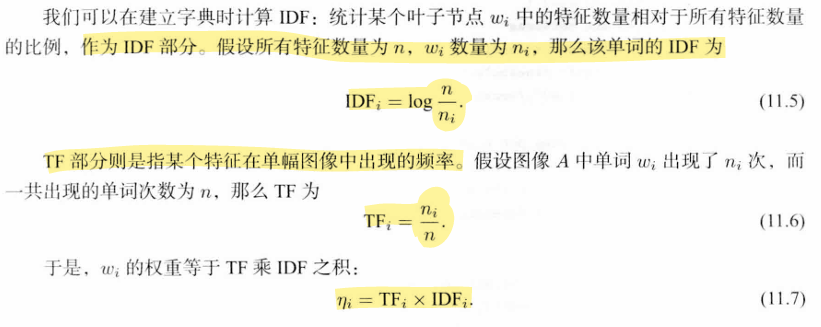
四、相似度计算
TF-IDF(词频-逆文档词频)

检测图像相似度的其他方法:VLAD,VLAD-NET








![[office] Excel数据透视表有什么用途?Excel数据透视表怎么做? #学习方法#职场发展](https://img-blog.csdnimg.cn/img_convert/e3b5e453373ee72d55efc3198269664f.jpeg)