操纵运动学

ISAAC教程合集地址
文章目录
- 操纵运动学
- 应用架构
- 实施细节
- 正向运动学
- 逆运动学
- 小码
为了控制机器人手臂的运动,需要数学表示法来计算执行器输入并为轨迹规划器表示障碍物。 为实现这一点,操纵运动学 GEM 将铰接式机器人系统表示为连接的刚体,并在配置空间和笛卡尔空间之间转换机器人状态。
应用架构
机器人手臂被建模为一棵链接树,每个链接都由一个字符串名称标识。 每个链接都可以有一个“马达”来描述它的框架和它的子框架之间的转换。 这种变换可以是恒定的(对于非关节链接和固定关节)或参数化用于可移动关节,如旋转关节。
注意
链接目前没有用于碰撞建模的关联几何体(网格)。
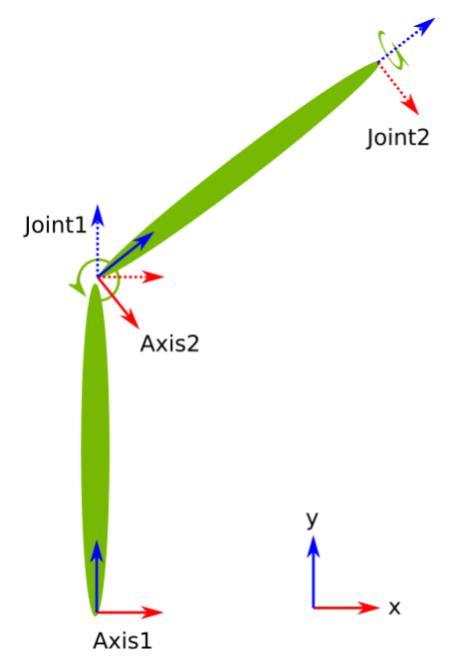
运动树的自由度是运动链中所有电机的自由度之和。 下面的示例显示了具有四个链接的运动链。 连杆“Axis1”和“Axis2”(实线框所示)具有恒定电机,连杆“Joint1”和“Joint2”(虚线框所示)具有参数化电机,旋转轴沿(001) 和 (010)(在它们自己的帧中)分别。
实施细节
操纵运动学 GEM 位于 //engine/gems/kinematic_tree: kinematic_tree。 所有计算都作为双四元数执行,以表示 3D 空间中的位移:有关更多详细信息,请参阅 //engine/core/math/dual_quaternion.hpp 组件。 运动学状态的验证目前仅考虑关节限制; 目前没有其他自碰撞检查。
正向运动学
为了从每个关节的位置找到末端执行器的位置,应用程序提取从根部到末端执行器的链接链,沿途乘以每个链接的对偶四元数。 最终的对偶四元数将表示当前的 3D 位移并且可以转换为 Pose3d。
逆运动学
为了找到将末端执行器带到给定目标的关节配置,该应用程序使用雅可比转置实现了梯度下降法。 对于过度指定的系统(即具有六个以上关节的系统),此解决方案提供与提供给求解器的初始状态最接近的配置。 当目标状态和当前状态在配置步骤中连接和关闭时,以及当前状态作为初始猜测提供给求解器时,这是有效的。
小码
Manipulation Kinematics GEM 使用 KinematicTree codelet 加载运动学树文件,该文件的命名结构为“<name>.kinematic.json”。 以下是文件格式的示例:
{
"links": [
{
"name": "base",
"motor": {
"type": "constant",
"properties": {
"pose": {
"translation": [0.0, 0.0, 0.0],
"rotation": {
"axis": [0.0, 0.0, 1.0],
"angle_radians": 0.0
}
}
}
}
},
{
"name" : "axis1",
"parent": "base",
"motor": {
"type": "constant",
"properties": {
"pose": {
"translation": [0.0, 0.0, 0.1373],
"rotation": {
"axis": [0.7071, 0.7071, 0.0],
"angle_degrees": 180.0
}
}
}
}
},
{
"name" : "joint1",
"parent": "axis1",
"motor": {
"type": "revolute",
"properties": {
"axis": [0, 0, 1]
}
}
}
]
}
更多精彩内容:
https://www.nvidia.cn/gtc-global/?ncid=ref-dev-876561