🔥🔥 欢迎来到小林的博客!!
🛰️博客主页:✈️小林爱敲代码
🛰️文章专栏:✈️小林的C++之路
🛰️欢迎关注:👍点赞🙌收藏✍️留言
AVL树是一个平衡二叉搜索,相比于红黑树,它更平衡。但是相比于插入删除的操作,红黑树更优。因为旋转有消耗,而红黑树的旋转明显要比AVL树少的多。所以这篇文章给大家带来了平衡二叉树的插入和查找操作,全程动图讲解!千万不要错过!至于删除操以后有机会为大家更新。
每日一句: 即使道路坎坷不平,车轮也要前进;即使江河波涛汹涌,船只也航行。

目录
- AVL树的概念
- AVL树的节点创建
- AVL类创建
- AVL树的插入
- 检查AVL树是否正常
- 查找值
- 总结🥳:
AVL树的概念
AVL是一颗平衡二叉搜索树,相比于二叉搜索树。AVL它能始终保持平衡,因为二叉搜索树的缺陷太大。当有序插入数据时,整颗树就会变成一个单链表。因此,两位俄罗斯的数学家G.M.Adelson-Velskii和E.M.Landis在1962年发明了一种解决上述问题的方法:当向二叉搜索树中插入新结点后,如果能保证每个结点的左右子树高度之差的绝对值不超过1(需要对树中的结点进行调整),即可降低树的高度,从而减少平均
搜索长度。
AVL树需要满足以下两点性质:
1.它的左右子树都是AVL树。
2.每颗子树的高度差(平衡因子)不超过1或者小于-1。
那我们来看看一颗典型的AVL树

我们可以发现,左边高,它的高度差就是 -1,右边高,高度差就是1。两边一样高,那么高度差就是 0 。所以我们可以用平衡因子,来确定它的一个高度差。这样可以更好的控制它的高度。
AVL树的节点创建
为了更好的控制,我们决定使用三叉链。也就是新增一个parent节点指向自己的父亲,根节点的父亲为空指针。而我们还要一个平衡因子变量,来记录它子树的高度差。left和right指针指向左右两个孩子。这里我们采取key,value模型,所以用pair结构体,作为节点的值。
节点结构体代码:
template<class K,class V>
struct AVLNode
{
AVLNode<K, V>* _left;
AVLNode<K, V>* _right;
AVLNode<K, V>* _parent;
int _bf; //平衡因子,记录高度差
pair<K, V> _kv; //存储的一对数据
//构造函数
AVLNode(const pair<K,V>& kv)
:_left(nullptr)
,_right(nullptr)
,_parent(nullptr)
,_bf(0) //新增节点肯定是叶子节点,所以高度默认0
,_kv(kv){}
};
AVL类创建
只需要一个成员变量 root 来指向整颗树的根即可。构造函数就把root初始化为空。
template <class K, class V>
class AVLTree
{
typedef AVLNode<K, V> Node;
public:
AVLTree() :_root(nullptr){}
private:
Node* _root;//AVL树的根
};
AVL树的插入
AVL树的插入,我们要先找到可以插入的位置,然后插入。插入之后我们树的高度可能会发生变化,因此我们需要向上去更新平衡因子。所以我们插入后分多种情况,那就是插入后平衡因子为 0, 1/-1 ,2/-2的情况
插入后平衡因子为0的情况:
插入后平衡因子为0,那么说明在插入之前,这颗树的平衡因子是 -1 或者1,所以在插入之后这棵树的平衡因子变成了0,那么就意味着这棵树已经平衡了,这种情况就不需要做什么事情了。
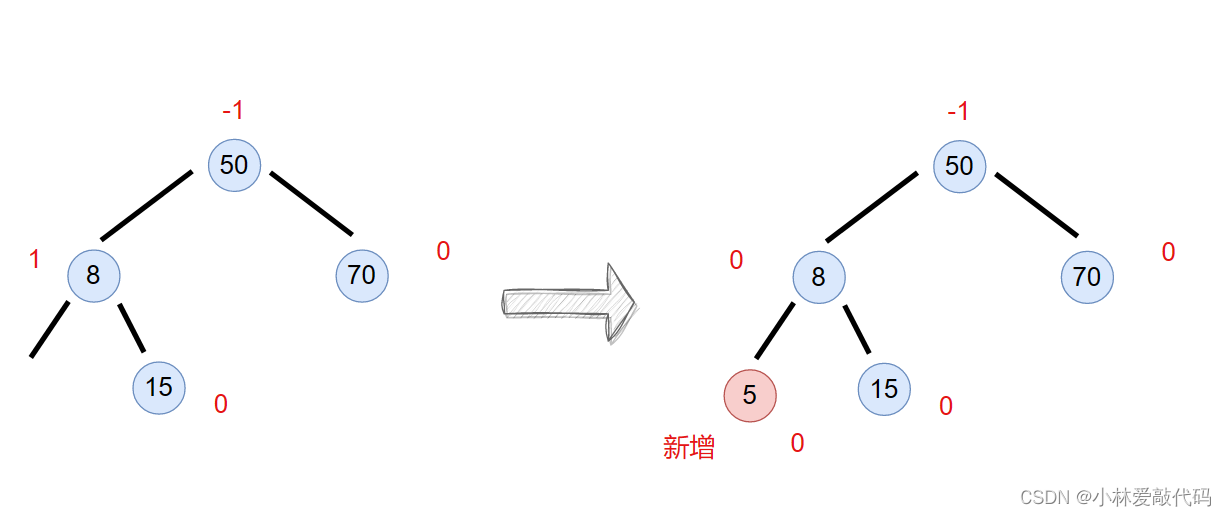
插入后平衡因子为1/-1的情况:
如果插入和平衡因子为1或者-1,说明在插入之前这棵树的平衡因子是0。也就是说插入之前这颗树是平衡的,而插入之后,引发了高度变化。所以可能会造成不平衡的情况,这种情况我们需要一种往上更新平衡因子。在更新的过程可能会遇到平衡因子变成 2 或者 -2的情况,这时候就需要发生旋转。

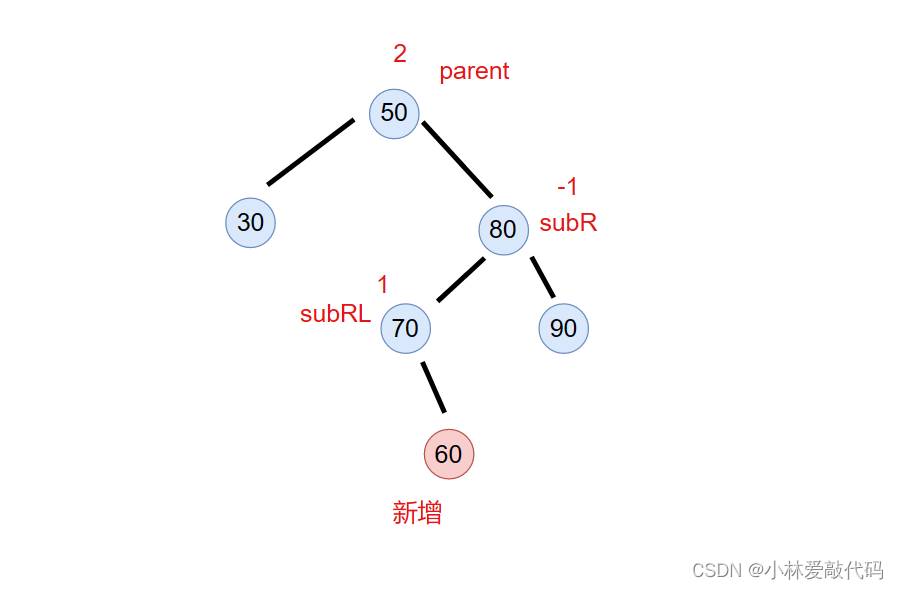
平衡因子为2/-2的情况:
在插入的过程中,平衡因子可能会出现为2/-2的情况。当平衡因子为1/-1的时候,会一直往上更新,而在更新的过程中就会发生平衡因子为 2/-2的情况,这种情况我们就需要发生旋转。
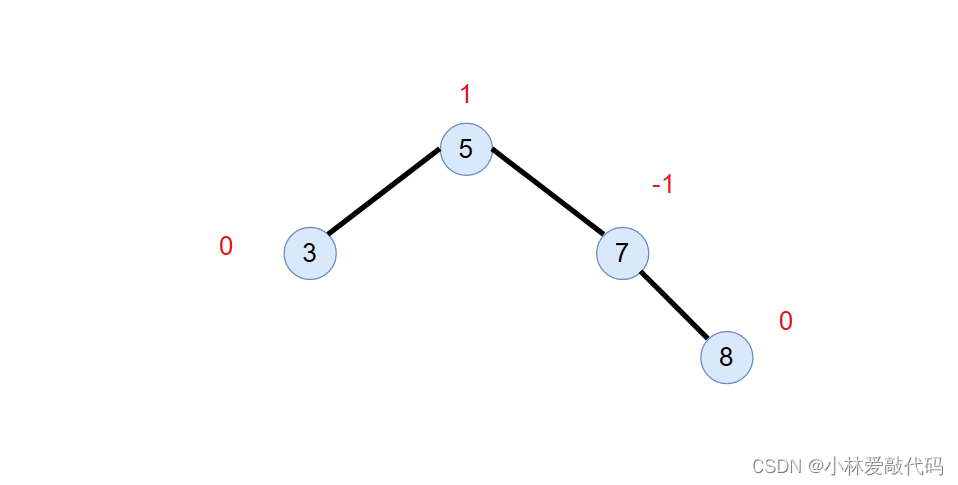
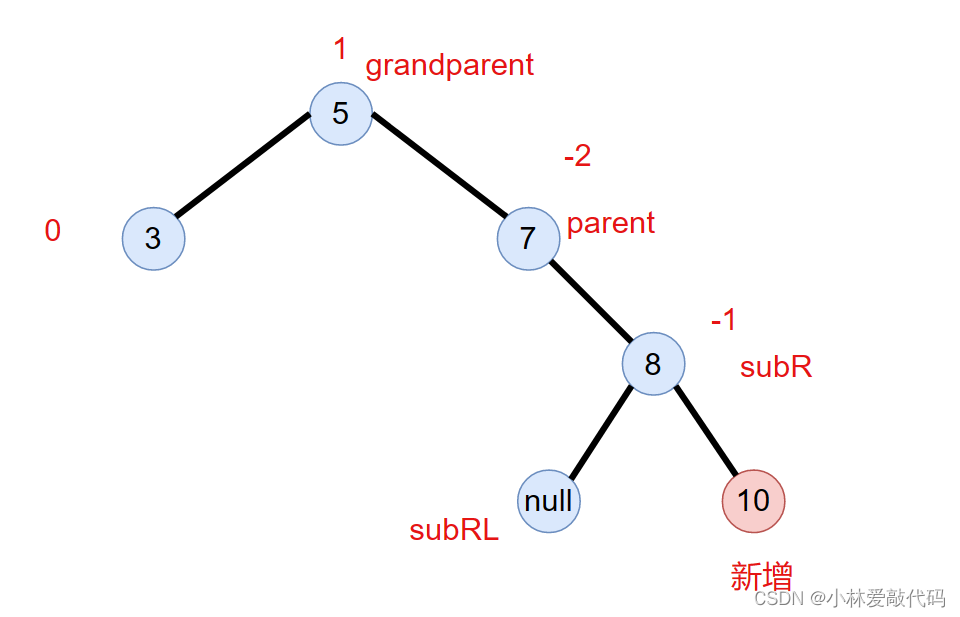
假设我们插入一个10,那么10插入的位置应该在 8的右边。
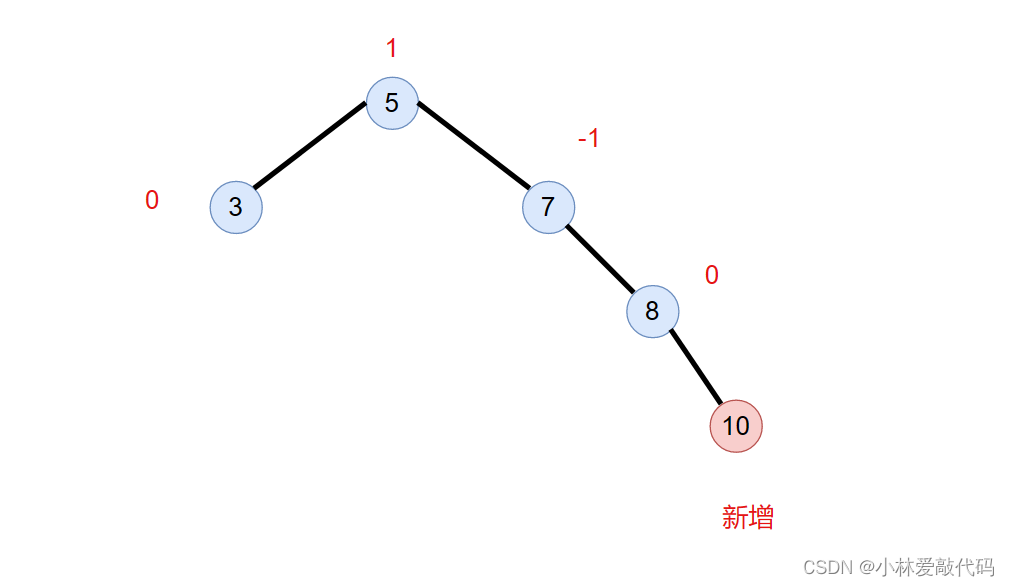
那么此时 8 的左右子树高度发生了变化,因为插入了一个新节点。如果新增节点在右边,则 平衡因子自减,如果新增节点在右边,则平衡因子自增。所以新增后,平衡因子的变化是。
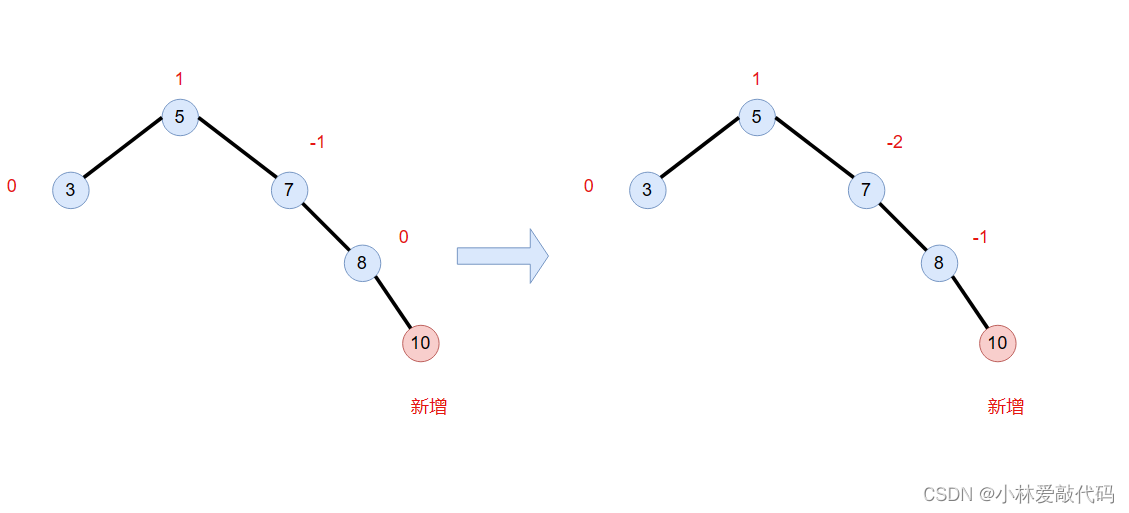
也就是,7所在的节点的子树不平衡了,因为它的平衡因子 > 1了。所以此时我们要发生旋转。而旋转有四种情况。
第一种情况,右边一边高
就如上图的情况,7所在节点的右子树右边一边高,所以这时候我们需要左旋转。那么我们假设7节点为parent。7的右节点8为subR,8的左节点为subRL,而7的父节点为parentparent
左单旋的步骤:
1.让parent的右节点连接subRL
2.subRL的父节点连接parent,如果为空则不连接
3.subR的左节点连接parent
4.parent的父节点连接subR
5.grandparent与subR连接
旋转流程图

最后,我们会发现parent和subR的平衡因子都变了0。也就意味着这颗子树达到了平衡。
左旋转代码:
// 左单旋
void RotateL(Node* parent)
{
Node* grandparent = parent->_parent;
Node* subR = parent->_right;
Node* subRL = subR->_left;
//父亲连接subRL
parent->_right = subRL;
if (subRL)
subRL->_parent = parent;
//subR的左边连接parent
subR->_left = parent;
parent->_parent = subR;
//grandparent连接subR
if (grandparent == nullptr)
{
//grandparent为空,说明parent一开始是根节点
_root = subR;
subR->_parent = nullptr;
}
else
{
//如果parent一开是grandparent的左子树,则grandparent的左子树连接subR
if (parent == grandparent->_left)
grandparent->_left = subR;
else
grandparent->_right = subR;
subR->_parent = grandparent;
}
//更新平衡因子
parent->_bf = subR->_bf = 0;
}
第二种情况:左边一边高
左边一边高和右边一边高的思路完全一样。只不过方向反过来。。下面这棵树就是左边一边高,所以我们用右单旋进行调整。
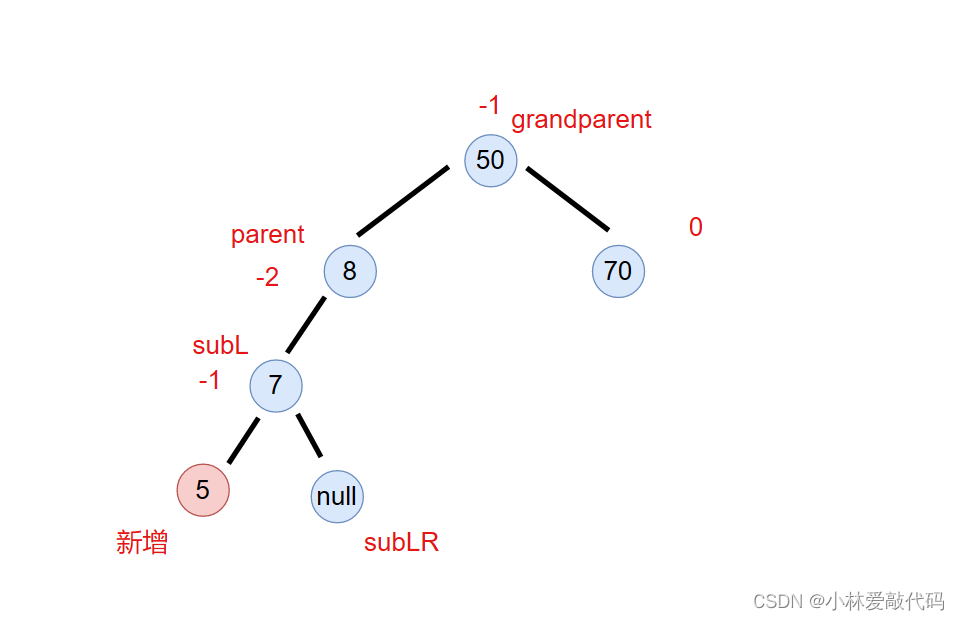
右单旋的步骤:
1.让parent的左节点连接subLR
2.subLR的父节点连接parent,如果为空则不连接
3.subL的右节点连接parent
4.parent的父节点连接subL
5.grandparent与subL连接
右单旋旋转动图:

右单旋代码:
//右单旋
void RotateR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
Node* grandpraent = parent->_parent;
parent->_left = subLR;
if (subLR)
subLR->_parent = parent;
subL->_right = parent;
parent->_parent = subL;
if (grandpraent == nullptr)
{
_root = subL;
subL->_parent = nullptr;
}
else
{
if (grandpraent->_left == parent)
grandpraent->_left = subL;
else
grandpraent->_right = subL;
subL->_parent = grandpraent;
}
subL->_bf = parent->_bf = 0;
}
第三种情况:新节点插入较高左子树的右侧—左右
一边高是直线,曲线就是整棵树是左边高,但是它的孩子却在和它相反的一边。这就意味着这棵树是曲线的,所以单纯的左右旋转无法使它达到平衡。而旋转完后,我们还需要控制平衡因子,控制平衡因子又有三种情况。
情况1.当subL右节点的平衡因子为0时(也就是新增)
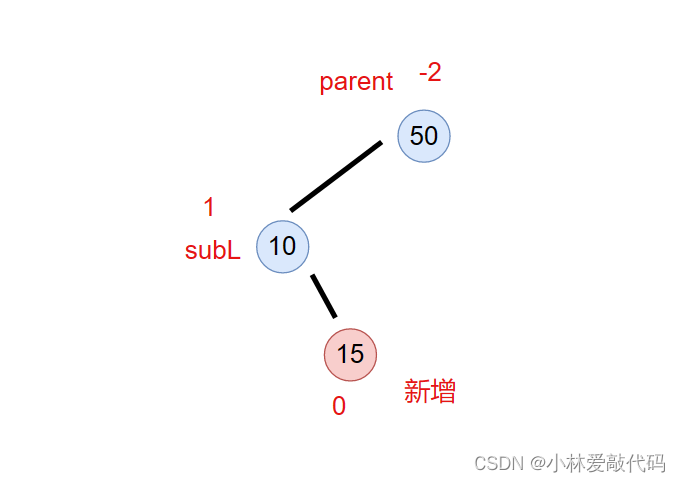
把subL左旋转后
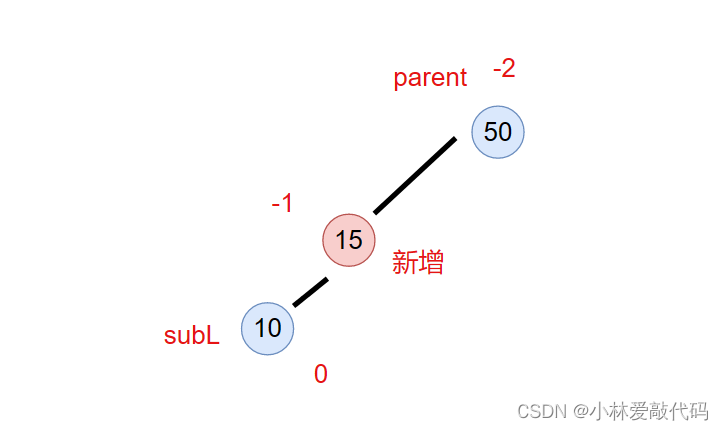
随后这颗树就变成了左边一边高,我们在把parent右旋转。
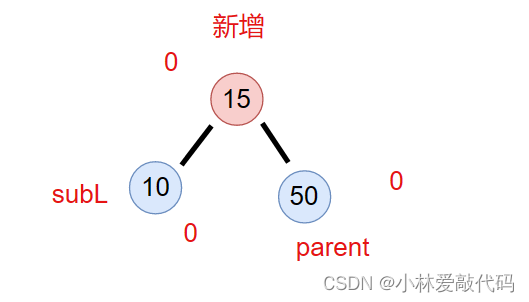
这种情况下,新增节点,subL,parent的平衡因子都变成了0。
情况2.subL的右节点平衡因子为-1时
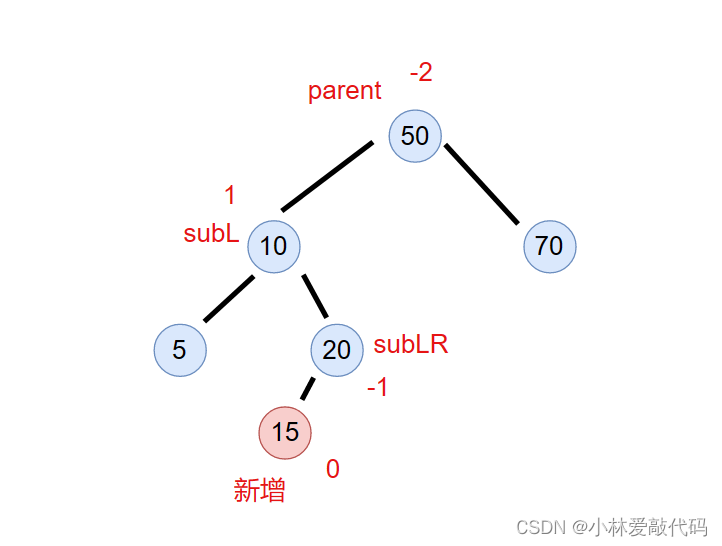
和之前一样,先把subL左旋转

再把parent右旋转

旋转后
subL的平衡因子为0
subLR的平衡因子为0
parent的平衡因子为1
情况3.subL的右节点平衡因子为1时
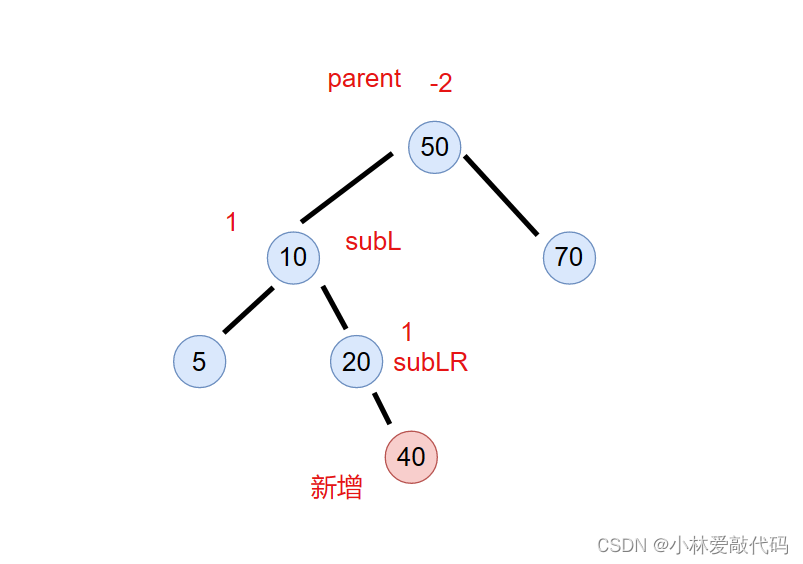
老规矩,把subL进行左单旋

再把parent右单旋

旋转后
subL的平衡因子为-1
subLR的平衡因子为0
parent的平衡因子为0
左右双旋代码:
void RotateLR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
int lrbf = subLR->_bf;
//先左旋subL
RotateL(subL);
//右旋parent
RotateR(parent);
//保存LR的平衡因子
if (lrbf == 0)
{
parent->_bf = subL->_bf = subLR->_bf = 0;
}
else if (lrbf == -1)
{
subL->_bf = subLR->_bf = 0;
parent->_bf = 1;
}
else if (lrbf == 1)
{
subL->_bf = -1;
subLR->_bf = parent->_bf = 0;
}
else
assert(false);
}
第四种情况:新节点插入较高左子树的左侧—右左
这种情况和第三种情况相反,但也另外分了三种情况。
情况1.subRL就是新增节点
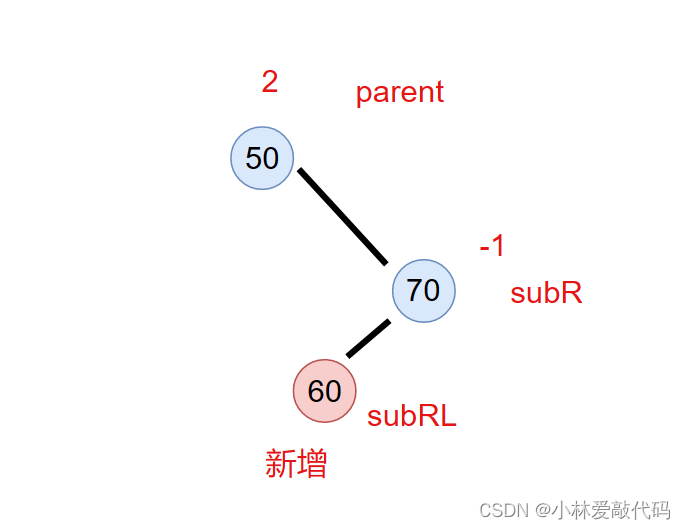
先右旋转subR
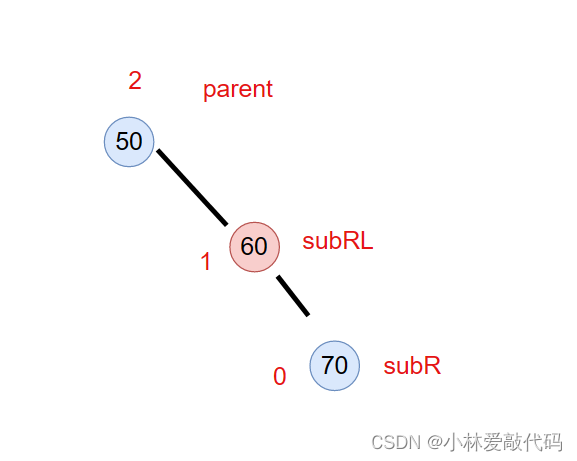
再左旋转parent
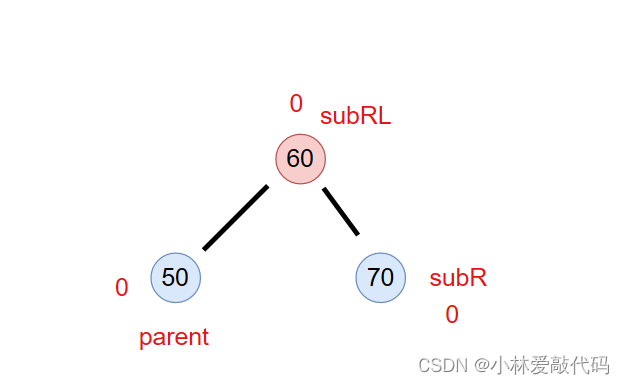
旋转完后,subRL和subR还有parent的平衡因子都为0。
情况2.当在subRL的平衡因子为-1时

先右单旋subR

再左单旋parent

最后的平衡因子分别为:
subRL 0
parent 0
subR 1
情况3.当在subRL的平衡因子为1时
老规矩,先右旋 subR

然后左旋转parent

最后的平衡因子分别是:
parent -1
subRL 0
subR 0
右左双旋代码:
//右左双旋
void RotateRL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
int rlbf = subRL->_bf;
RotateR(subR);
RotateL(parent);
if (rlbf == 0)
{
subR->_bf = subRL->_bf = parent->_bf = 0;
}
else if (rlbf == -1)
{
subRL->_bf = parent->_bf = 0;
subR->_bf = 1;
}
else if (rlbf == 1)
{
parent->_bf = -1;
subR->_bf = subRL->_bf = 0;
}
else
assert(false);
}
检查AVL树是否正常
bool IsBalance()
{
return _IsBalance(_root);
}
bool _IsBalance(Node* root)
{
if (root == nullptr)
return true;
int LeftHeight = _Height(root->_left);
int RightHeight = _Height(root->_right);
if (root->_bf != RightHeight - LeftHeight)
{
cout << root->_kv._first <<"现在是平衡因子是:" << root->_bf << endl;
cout << root->_kv._first <<"平衡因子应该是:" << RightHeight - LeftHeight << endl;
}
return abs(LeftHeight - RightHeight) < 2;
}
int _Height(Node* root)
{
if (root == nullptr)
return 0;
int leftHeight = _Height(root->_left);
int rightHeight = _Height(root->_right);
return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1;
}
查找值
直接查找即可
//查找
bool Find(const K& k)
{
if (_root == nullptr)
return false;
Node* cur = _root;
while (cur)
{
if (cur->_kv.first > k)
cur = cur->_left;
else if (cur->_kv.first < k)
cur = cur->_right;
else
return true;
}
return false;
}
全部代码:
template<class K, class V>
struct AVLNode
{
AVLNode<K, V>* _left;
AVLNode<K, V>* _right;
AVLNode<K, V>* _parent;
int _bf; //平衡因子,记录高度差
pair<K, V> _kv; //存储的一对数据
//构造函数
AVLNode(const pair<K, V>& kv)
:_left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _bf(0) //新增节点肯定是叶子节点,所以高度默认0
, _kv(kv) {}
};
template <class K, class V>
class AVLTree
{
typedef AVLNode<K, V> Node;
public:
AVLTree() :_root(nullptr){}
bool insert(const pair<K,V>& kv)
{
//如果是第一次插入
if (_root == nullptr)
{
_root = new Node(kv);
return true;
}
Node* cur = _root; //新增节点的插入位置
Node* parent = nullptr; //插入位置的父亲节点
while (cur)
{
parent = cur;
if (cur->_kv.first > kv.first)//新插节点的值比当前节点小,往左子树找
cur = cur->_left;
else if (cur->_kv.first < kv.first)
cur = cur->_right;
else
return false; //不允许插入重复值的节点
}
cur = new Node(kv); //创建新节点
cur->_parent = parent; //连接父亲
if (cur->_kv.first > parent->_kv.first)
parent->_right = cur;
else
parent->_left = cur;
//节点插入成功,控制平衡因子,父亲为空,则说明调整到根节点了
while (parent)
{
if (cur == parent->_right) //插入节点在父亲节点的右边
parent->_bf++; //在右边++,在左边--
else
parent->_bf--;
if (parent->_bf == 0)
{
//平衡因子为0,说明这棵树之前的平衡因子是-1或者1,也就是说插入新节点后变平衡了
break;
}
else if (parent->_bf == 1 || parent->_bf == -1)
{
//父亲的平衡因子是1或者-1,说明插入之前是0,也就是说插入之前是平衡的
//插入之后高度发生了变化,所以需要继续往上更新平衡因子
cur = parent;
parent = parent->_parent;
}
else if (parent->_bf == 2 || parent->_bf == -2)
{
//平衡因子为2或者-2,说明这颗树或者子树不平衡了,那么调整这颗树
if (parent->_bf == 2 && cur->_bf == 1)//右边一边高
RotateL(parent);
else if (parent->_bf == -2 && cur->_bf == -1)//左边一边高
RotateR(parent);
else if (parent->_bf == -2 && cur->_bf == 1)
RotateLR(parent);
else if (parent->_bf == 2 && cur->_bf == -1)
RotateRL (parent);
break;
}
else
assert(false);
}
}
// 左单旋
void RotateL(Node* parent)
{
Node* grandparent = parent->_parent;
Node* subR = parent->_right;
Node* subRL = subR->_left;
//父亲连接subRL
parent->_right = subRL;
if (subRL)
subRL->_parent = parent;
//subR的左边连接parent
subR->_left = parent;
parent->_parent = subR;
//grandparent连接subR
if (grandparent == nullptr)
{
//grandparent为空,说明parent一开始是根节点
_root = subR;
subR->_parent = nullptr;
}
else
{
//如果parent一开是grandparent的左子树,则grandparent的左子树连接subR
if (parent == grandparent->_left)
grandparent->_left = subR;
else
grandparent->_right = subR;
subR->_parent = grandparent;
}
//更新平衡因子
parent->_bf = subR->_bf = 0;
}
//右单旋
void RotateR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
Node* grandpraent = parent->_parent;
parent->_left = subLR;
if (subLR)
subLR->_parent = parent;
subL->_right = parent;
parent->_parent = subL;
if (grandpraent == nullptr)
{
_root = subL;
subL->_parent = nullptr;
}
else
{
if (grandpraent->_left == parent)
grandpraent->_left = subL;
else
grandpraent->_right = subL;
subL->_parent = grandpraent;
}
subL->_bf = parent->_bf = 0;
}
//左右双旋
void RotateLR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
int lrbf = subLR->_bf;
//先左旋subL
RotateL(subL);
//右旋parent
RotateR(parent);
//保存LR的平衡因子
if (lrbf == 0)
{
parent->_bf = subL->_bf = subLR->_bf = 0;
}
else if (lrbf == -1)
{
subL->_bf = subLR->_bf = 0;
parent->_bf = 1;
}
else if (lrbf == 1)
{
subL->_bf = -1;
subLR->_bf = parent->_bf = 0;
}
else
assert(false);
}
//右左双旋
void RotateRL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
int rlbf = subRL->_bf;
RotateR(subR);
RotateL(parent);
if (rlbf == 0)
{
subR->_bf = subRL->_bf = parent->_bf = 0;
}
else if (rlbf == -1)
{
subRL->_bf = parent->_bf = 0;
subR->_bf = 1;
}
else if (rlbf == 1)
{
parent->_bf = -1;
subR->_bf = subRL->_bf = 0;
}
else
assert(false);
}
//查找
bool Find(const K& k)
{
if (_root == nullptr)
return false;
Node* cur = _root;
while (cur)
{
if (cur->_kv.first > k)
cur = cur->_left;
else if (cur->_kv.first < k)
cur = cur->_right;
else
return true;
}
return false;
}
bool IsBalance()
{
return _IsBalance(_root);
}
bool _IsBalance(Node* root)
{
if (root == nullptr)
return true;
int LeftHeight = _Height(root->_left);
int RightHeight = _Height(root->_right);
if (root->_bf != RightHeight - LeftHeight)
{
cout << root->_kv.first << "现在是平衡因子是:" << root->_bf << endl;
cout << root->_kv.first << "平衡因子应该是:" << RightHeight - LeftHeight << endl;
}
return abs(LeftHeight - RightHeight) < 2;
}
int _Height(Node* root)
{
if (root == nullptr)
return 0;
int leftHeight = _Height(root->_left);
int rightHeight = _Height(root->_right);
return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1;
}
private:
Node* _root;//AVL树的根
};
总结🥳:
💦💦关于AVL的删除,以后有机会会为大家更新。如果有写的不好或者有错误的地方,欢迎大家指出。后序会持续为大家更新红黑树,C/C++,数据结构以及linux操作系统相关的知识,如果不嫌弃可以点个收藏加关注。谢谢大佬们了!
🔥🔥你们的支持是我最大的动力,希望在往后的日子里,我们大家一起进步!!!🔥🔥
![[Python从零到壹] 六十三.图像识别及经典案例篇之图像漫水填充分割应用](https://img-blog.csdnimg.cn/a79300a1dd07407c8829550abc424771.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBARWFzdG1vdW50,size_20,color_FFFFFF,t_70,g_se,x_16#pic_center)