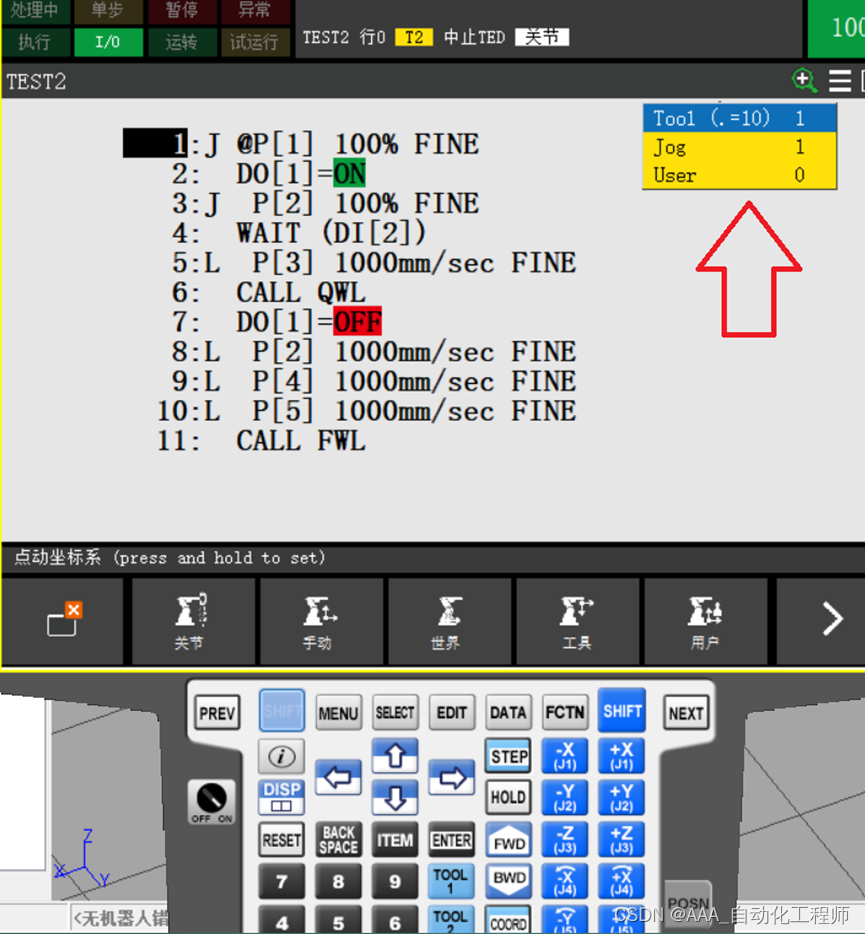
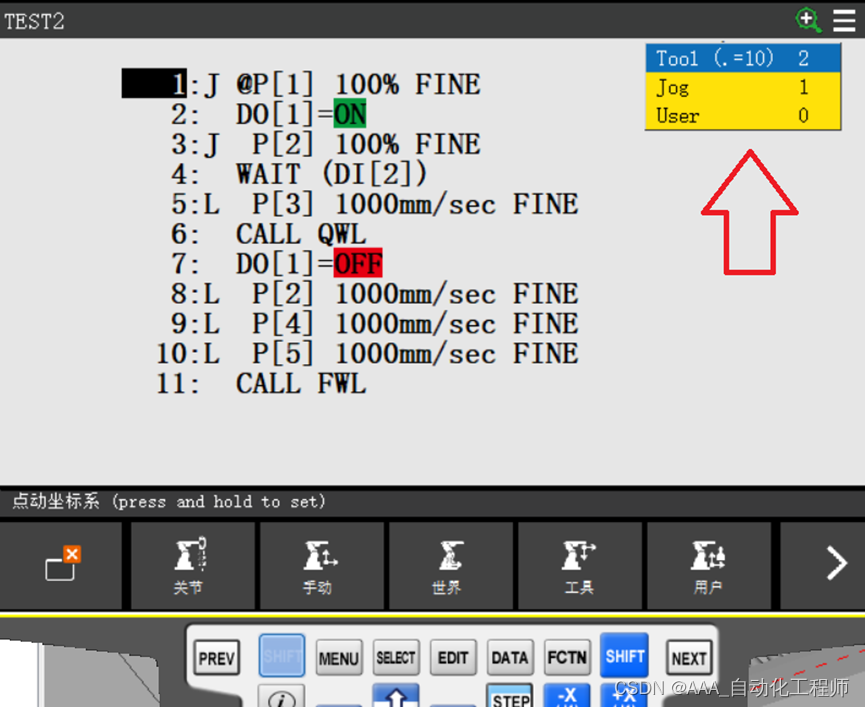
FANUC机器人INTP-250或251用户坐标系或工具坐标系与示教资料不符报警的处理办法
news2026/2/10 11:05:34



本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/174885.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
《牛客网刷题之零基础入门前端之CSS》
目录
CSS
选择器
FED9 CSS选择器——标签、类、ID选择器
FED10 CSS选择器——伪类选择器
FED11 CSS选择器——伪元素
样式设置
FED12 按要求写一个圆
FED13 设置盒子宽高
FED74 段落标识
FED75 设置文字颜色
FED76 圣诞树
布局
FED14 浮动和清除浮动
FED15 固定定…

LeetCode刷题模版:162、164-166、168
目录 简介162. 寻找峰值164. 最大间距【考查排序】165. 比较版本号166. 分数到小数168. Excel表列名称结语简介 Hello! 非常感谢您阅读海轰的文章,倘若文中有错误的地方,欢迎您指出~ ଘ(੭ˊᵕˋ)੭ 昵称:海轰 标签:程序猿|C++选手|学生 简介:因C语言结识编程,随后…

【GlobalMapper精品教程】041:从多波段影像中提取单波段方法
本实验讲解globalmapper中文24软件从多波段遥感影像中提取单波段方法。 参考阅读:【Envi风暴】Envi插件大全:多波段拆分工具的巧妙使用 文章目录 一、多波段影像介绍二、单波段提取方法一、多波段影像介绍
加载实验数据:打开GM软件,加载专栏配套实验数据包中的data041.rar…
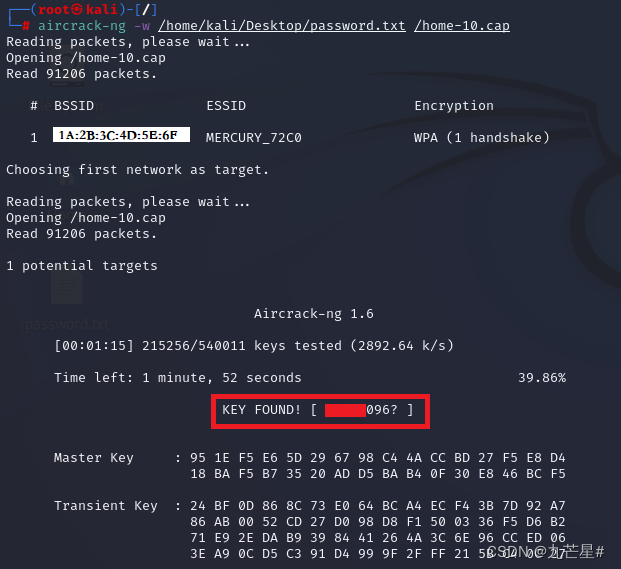
【网络安全】WiFi密码爆破教程
WiFi密码爆破教程前言一、什么是暴力破解?二、准备破解工具1.VMware Pro 16 虚拟机安装2. VMware安装Kali Linux3. kali监听无限网卡三、WiFi密码暴力破解1. 虚拟机连接USB网卡2. 扫描附近WiFi3. 查看目标WiFi连接设备4. 抓包5. 破解前言
暴力破解攻击是指攻击者通…

代码随想录算法训练营第15天 102. 二叉树的层序遍历、226. 翻转二叉树
代码随想录算法训练营第15天| 102. 二叉树的层序遍历、226. 翻转二叉树
二叉树的层序遍历
学会二叉树的层序遍历,可以一口气打完以下十题:
102.二叉树的层序遍历107.二叉树的层次遍历II199.二叉树的右视图637.二叉树的层平均值429.N叉树的层序遍历515…
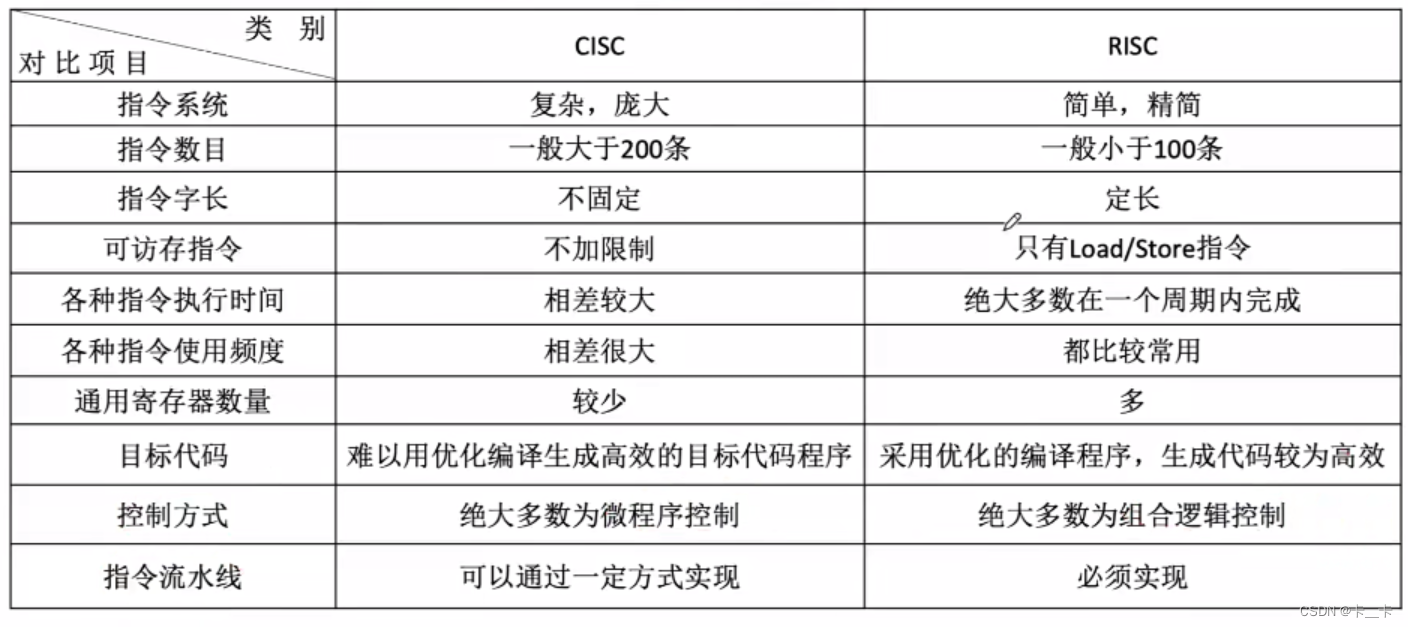
4-3指令系统-CISC和RISC
文章目录一.复杂指令系统计算机CISC二.精简指令系统计算机RISC三.CISC和RISC比较一.复杂指令系统计算机CISC
为增强原有指令的功能,设置更为复杂的新指令实现软件功能的硬化,这类机器成为复杂指令系统计算机CISC(Complex Instruction Set Co…

Linux下的FTP服务器
目录
总体功能
功能1----------------查看服务器端的文件列表信息
功能2 ---------------从服务器段下载文件到客户端
功能3 ---------------向服务器端上传文件
功能4----------------客户端退出,服务器继续等待链接 总体功能 功能1----------------查看服务器…
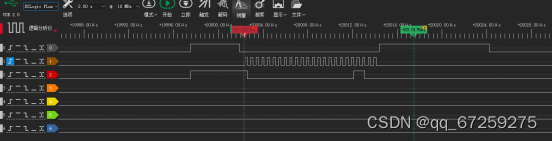
STM32 SPI读写速度评估
目的:测试STM32H7 系列芯片的SPI读写速度。
测试环境:使用STM32H743, 逻辑分析仪, cubeIDE;
测试方法:使用了3种方法:软件IO模拟SPI, 软件控制CSMCU的SPI模块,完全使用SPI模块&…
Android 深入系统完全讲解(30)
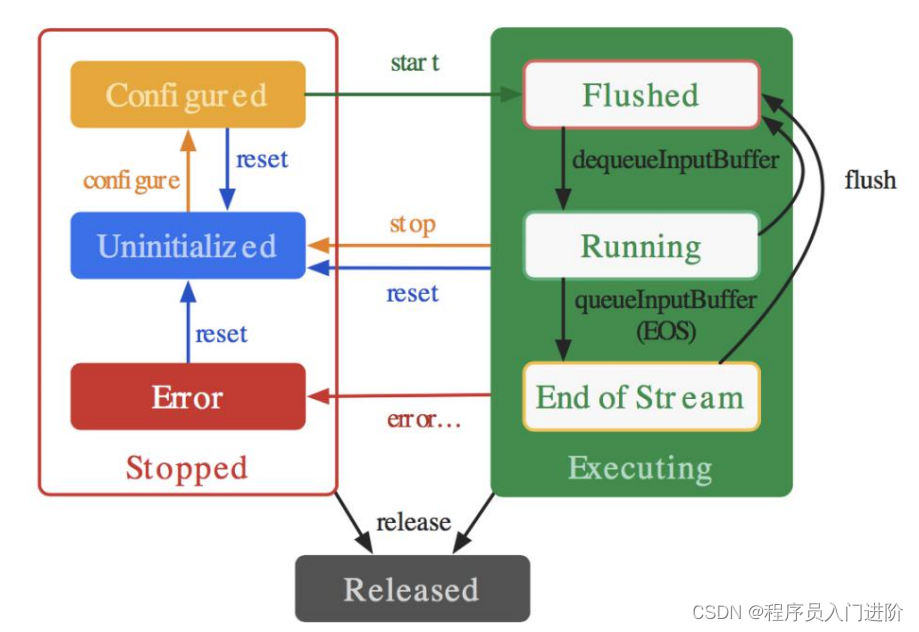
下图是生命周期的说明图:如图可以看到:
当创建编解码器的时候处于未初始化状态。首先你需要调用 configure(…)方法让它处于 Configured 状态,然后调用 start()方法让其处于 Executing 状态。在 Executing 状态下,你就 可以使用…

LCHub:全新华为云Astro低代码平台,重塑企业数字化转型
为什么技术创新与业务突破难以挂钩?为什么寻求的卓越成果总难以实现?华为云Astro呈上解决之道,抓住重点一招致胜,让人人皆可高效开发,使创新按照你的步调进行。 华为云Astro低代码平台,重塑企业数字化转型 当企业倍受数字化升级困扰时,若仍延用传统编码开发,则会阻碍整…

Bootstrap4 之栅格系统
Bootstrap4 之栅格系统参考描述栅格系统(网格系统)原理容器.container 与视口宽度行列样式栅格等级网格宽度特点左对齐另起一行自适应布局对齐垂直对齐行列水平对齐排列响应式优先级偏移显隐参考
项目描述Bootstrap 入门经典珍妮弗、凯瑞恩Bootstrap 基…

内存屏障由来的理解和使用《编程高手必学的内存知识》学习笔记 Day 5
系列文章目录 这是本周期内系列打卡文章的所有文章的目录
《Go 并发数据结构和算法实践》学习笔记 Day 1《Go 并发数据结构和算法实践》学习笔记 Day 2《说透芯片》学习笔记 Day 3《深入浅出计算机组成原理》学习笔记 Day 4 文章目录系列文章目录前言一、概念理解(…

JUC面试(六)——Java锁
Java锁
公平锁和非公平锁
概念
公平锁
是指多个线程按照申请锁的顺序来获取锁,类似于排队买饭,先来后到,先来先服务,就是公平的,也就是队列
非公平锁
是指多个线程获取锁的顺序,并不是按照申请锁的顺…

steam搬砖项目,每天1-2小时,月入1w+(内附教学资料)
steam搬砖就非常合适,最大的优点,操作性简单,0门槛也不用担心,一台电脑就能搞定。利用空余时间完成就可以
话不多说,先上目录,以便大家阅读~
一.steam搬砖玩法
1、steam搬砖项目介绍
2、项目原理与产出…

ROS2机器人编程简述humble-第二章-Parameters .3.4
ROS2机器人编程简述humble-第二章-Launchers .3.3机器人程序通常需要配置各类参数,官网和一些书中都有介绍。概述ROS中的参数与各个节点相关。参数用于在启动时(以及运行时)配置节点,而无需更改代码。参数的生存期与节点的生存期相…

【区块链】深入剖析免费赚钱app的本质
你对免费赚钱软件好奇吗?前言一、揭开“免费赚钱app”神秘面纱1.常见的赚钱app2.app真的在做慈善吗?3.羊毛党的价值4.真正的游戏规则二、区块链1.哈希算法2.互联网挖矿三、深入探讨“区块链”的套路1.免费赚钱app真正的价值2.虚拟货币的本质3.虚拟货币泡…
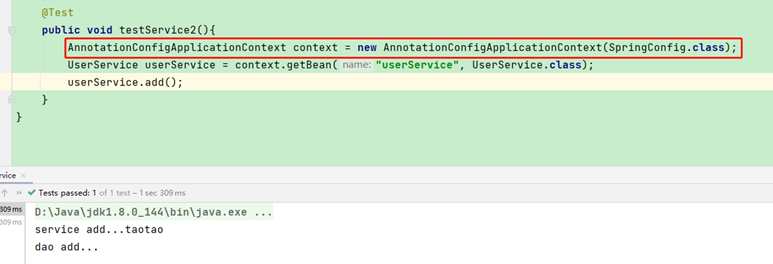
Java设计模式-观察者模式/观察者模式适合那些场景?怎么使用
继续整理记录这段时间来的收获,详细代码可在我的Gitee仓库SpringBoot克隆下载学习使用!
6.7 观察者模式
6.7.1 定义
又称发布-订阅模式,定义了一种一对多的依赖关系,让多个观察者对象同时监听某一个主题对象主体对象在状态变化…