控制障碍函数CBF详解(附带案例实现)
文章目录
- 控制障碍函数CBF详解(附带案例实现)
- 1. Control Affine System
- 2. Lyapunov Theory, Nagumo's Theory, Invariance Principle
- 3. Control Lyapunov Function (CLF) and CLF-QP
- 4. Control Barrier Function (CBF) and CBF-CLF-QP
- 5. A Toy Example
- 5.1 Derivation
- 5.2 Simulation
- Reference
1. Control Affine System
一个控制仿射系统的典型形式是
x ˙ = F ( x , u ) \dot{x} = F(x,u) x˙=F(x,u)
其中, x ∈ R n x\in \mathbb{R}^n x∈Rn是系统的状态, u ∈ R m u\in\mathbb{R}^m u∈Rm是系统的控制输入, F F F是Lipschitz连续的,这样就能保证给定一个初始状态 x ( t 0 ) = x 0 x(t_0)=x_0 x(t0)=x0的时候,动态系统的轨迹 x ( t ) x(t) x(t)存在且唯一。
我们通常处理的是非线性系统,那么我们可以将非线性的仿射系统写成如下的形式
x ˙ = f ( x ) + g ( x ) u \dot{x} = f(x) + g(x) u x˙=f(x)+g(x)u
其中 f : R n → R n f:\mathbb{R}^n \to \mathbb{R}^n f:Rn→Rn是系统的漂移向量场,它描述了系统在没有控制输入时的动态行为, g : R n → R n × m g:\mathbb{R}^n\to\mathbb{R}^{n\times m} g:Rn→Rn×m,是系统的控制向量场,它描述了系统的控制输入 u u u是如何影响系统的。
2. Lyapunov Theory, Nagumo’s Theory, Invariance Principle
Lyapunov Theory
对于系统 x ˙ = f ( x ) \dot{x}=f(x) x˙=f(x)而言, x ∈ R n x\in \mathbb{R}^n x∈Rn是系统的状态, f : R n → R n f:\mathbb{R}^n \to \mathbb{R}^n f:Rn→Rn是一个系统状态的映射函数。如果
∃ V ( x ) s.t. V ( x e ) = 0 , V ( x ) > 0 for x ≠ x e , V ˙ ( x ) = ∂ V ∂ x f ( x ) < 0 for x ≠ x e \exists V(x) \\ \text{s.t. } V(x_e) = 0, V(x)>0 \text{ for } x \ne x_e, \\ \dot{V}(x) = \frac{\partial V}{\partial x} f(x) < 0 \text{ for } x\ne x_e ∃V(x)s.t. V(xe)=0,V(x)>0 for x=xe,V˙(x)=∂x∂Vf(x)<0 for x=xe
那么系统则是稳定的。并且状态 x x x所构成的集合,可以被称为是一个不变集(Invariance set)。
不变集合: 集合 C \mathcal{C} C被称为不变的,如果系统从 C \mathcal{C} C内的任意一点开始演化,那么系统的轨迹始终停留在 C \mathcal{C} C内。
Nagumo’s Theory
对于系统 x ˙ = f ( x ) \dot{x} = f(x) x˙=f(x)而言, x ∈ R n x\in \mathbb{R}^n x∈Rn是系统的状态, C = { x ∣ h ( x ) ≥ 0 } \mathcal{C}=\{x|h(x)\ge0\} C={x∣h(x)≥0}是映射 h : R n → R h:\mathbb{R}^n \to \mathbb{R} h:Rn→R的一个上水平集,如果
h ˙ ( x ) ≥ 0 ∀ x ∈ ∂ C \dot{h}(x) \ge 0 \\ \forall x\in\partial\mathcal{C} h˙(x)≥0∀x∈∂C
那么 C \mathcal{C} C是一个不变集。符号的具体含义如下:
C = { x ∈ D ⊂ R n : h ( x ) ≥ 0 } , ∂ C = { x ∈ D ⊂ R n : h ( x ) = 0 } , Int ( C ) = { x ∈ D ⊂ R n : h ( x ) > 0 } , \begin{align*} \mathcal{C} & = \{ x\in D\sub \mathbb{R}^n: h(x) \ge 0 \}, \\ \partial\mathcal{C} & = \{ x\in D\sub \mathbb{R}^n: h(x) = 0 \}, \\ \text{Int}(\mathcal{C}) & = \{ x\in D\sub \mathbb{R}^n: h(x) > 0 \}, \end{align*} C∂CInt(C)={x∈D⊂Rn:h(x)≥0},={x∈D⊂Rn:h(x)=0},={x∈D⊂Rn:h(x)>0},
集合 C \mathcal{C} C是安全集, ∂ C \partial\mathcal{C} ∂C是安全集的边界, Int ( C ) \text{Int}(\mathcal{C}) Int(C)是安全集的内部点。
3. Control Lyapunov Function (CLF) and CLF-QP
Control Lyapunov Function
设 V ( x ) : R n → R V(x):\mathbb{R}^n \to \mathbb{R} V(x):Rn→R是一个连续可微的函数,如果这里存在一个常量 c > 0 c>0 c>0使得
1) Ω c : = { x ∈ R n : V ( x ) ≤ c } , a sublevel set of V ( x ) is bounded 2) V ( x ) > 0 , ∀ s ∈ R n \ { x e } , V ( x e ) = 0 3) inf u ∈ U V ˙ ( x , u ) < 0 , ∀ x ∈ Ω c \ { x e } \begin{align*} & \text{1) }\Omega_c := \{ x\in\mathbb{R}^n: V(x) \le c\}, \text{ a sublevel set of } V(x) \text{ is bounded} \\ & \text{2) }V(x) > 0, \forall s \in\mathbb{R}^n \backslash \{x_e\}, V(x_e) = 0 \\ & \text{3) }\inf_{u\in U} \dot{V}(x,u) < 0, \forall x \in \Omega_c \backslash \{x_e\} \end{align*} 1) Ωc:={x∈Rn:V(x)≤c}, a sublevel set of V(x) is bounded2) V(x)>0,∀s∈Rn\{xe},V(xe)=03) u∈UinfV˙(x,u)<0,∀x∈Ωc\{xe}
1)存在一个子集,使得 V ( x ) ≤ c V(x)\le c V(x)≤c是有界的
2)Lyapunov函数不在原点时大于零,在原点时等于零
3)对于控制量和系统状态来说,总使得 V ( x ) V(x) V(x)的导数 V ˙ ( x ) \dot{V}(x) V˙(x)小于零。
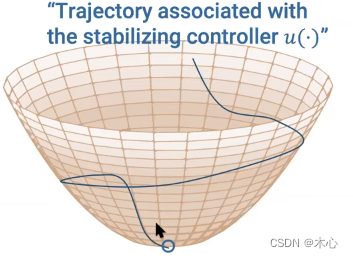
其中, V ( x ) V(x) V(x)可以被称为局部控制李雅普诺夫函数, Ω c \Omega_c Ωc是一个引力区(Region of Attraction, ROA), Ω c \Omega_c Ωc中的每一个点都会收敛到 x e x_e xe,整个轨迹就如下图所示,会一直保持在这个区域内,并且最终收敛到 x e x_e xe,这其实就是一种渐进稳定。
我们可以将导数显示地写出来
V ˙ ( x ) = ∇ V ( x ) x ˙ = ∇ V ( x ) f ( x ) + ∇ V ( x ) g ( x ) u = L f V ( x ) + L g V ( x ) u \begin{align*} \dot{V}(x) & = \nabla V(x) \dot{x} \\ & = \nabla V(x)f(x) + \nabla V(x)g(x)u \\ & = L_fV(x) + L_g V(x) u \end{align*} V˙(x)=∇V(x)x˙=∇V(x)f(x)+∇V(x)g(x)u=LfV(x)+LgV(x)u
其中 L p q ( x ) = ∇ q ( x ) ⋅ p ( x ) L_p q(x) = \nabla q(x) \cdot p(x) Lpq(x)=∇q(x)⋅p(x)是李导数算子,使得公式更加简洁。
为了使收敛更加迅速,我们需要考虑收敛的时间限制,指数收敛是一种快速的方式,所以我们希望最终的结果能够按照指数的方式进行收敛。
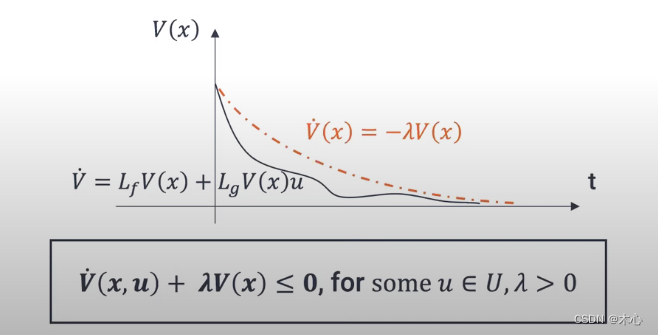
我们可以增加一个判断条件,设 V ( x ) : R n → R V(x):\mathbb{R}^n \to \mathbb{R} V(x):Rn→R是连续可微、正定、有界的函数,如果 ∃ λ > 0 \exists \lambda>0 ∃λ>0使得
4) inf u ∈ U V ˙ ( x , u ) + λ V ( x ) ≤ 0 \text{4) }\inf_{u\in U} \dot{V}(x,u) + \lambda V(x) \le 0 4) u∈UinfV˙(x,u)+λV(x)≤0
或者写成
inf u ∈ U [ L f V ( x ) + L g V ( x ) u ] + λ V ( x ) ≤ 0 \inf_{u\in U} [L_f V(x) + L_gV(x)u] + \lambda V(x) \le 0 u∈Uinf[LfV(x)+LgV(x)u]+λV(x)≤0
那么 V ( x ) V(x) V(x)就是指数稳定的控制李雅普诺夫函数(exponentially stabilizing CLF,ES-CLF),其中 λ \lambda λ是 V ( x ( t ) ) V(x(t)) V(x(t))上界的衰减率。
Control Lyapunov Function Quadratic Program
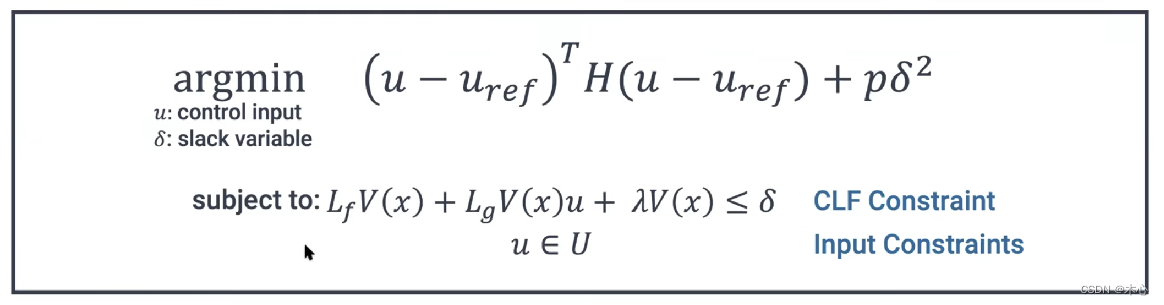
CLF约束对于 u u u是线性的,因此用最小范数控制器,二次规划的目标位最小化控制量,受限制为,满足李雅普诺夫函数收敛的上界以及控制量 u u u在解集内。由于这个优化为一个凸优化问题,因此其实时性是可以被保证的,CLF约束通常用松弛变量来保证问题的可行性,如果没有松弛变量,控制器将指数稳定到系统原点 x e x_e xe
4. Control Barrier Function (CBF) and CBF-CLF-QP
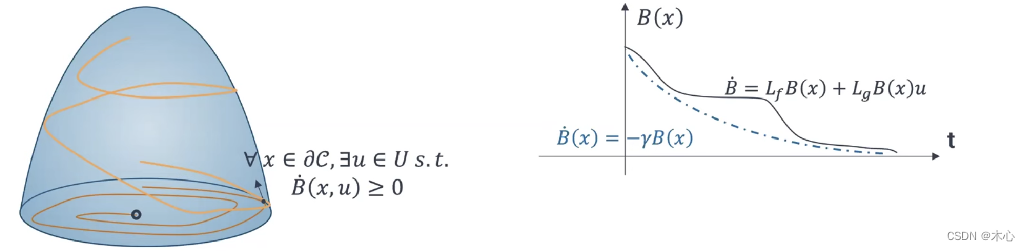
设 B ( x ) : R n → R B(x):\mathbb{R}^n \to \mathbb{R} B(x):Rn→R是连续、可微的函数, C = { x ∣ B ( x ) ≥ 0 } \mathcal{C}=\{x|B(x)\ge 0\} C={x∣B(x)≥0}是该函数的零上水平集,并且 ∇ B ( x ) ≠ 0 , ∀ x ∈ ∂ C \nabla B(x)\ne 0,\forall x\in\partial\mathcal{C} ∇B(x)=0,∀x∈∂C,如果 ∃ γ \exists \gamma ∃γ使得 ∀ x ∈ C \forall x\in\mathcal{C} ∀x∈C
sup u ∈ U [ L f B ( x ) + L g B ( x ) u ] + γ B ( x ) ≥ 0 \sup_{u \in U}[L_fB(x) + L_g B(x)u] + \gamma B(x) \ge 0 u∈Usup[LfB(x)+LgB(x)u]+γB(x)≥0
那么 B ( x ) B(x) B(x)就被称作Control Barrier Function
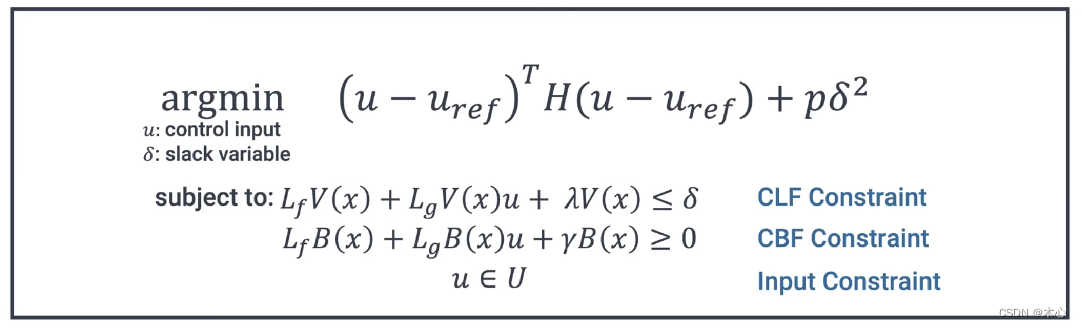
因此这个二次规划问题就变成了
5. A Toy Example
我们考虑一个简单的例子,在这个例子中有两辆车辆,分别是lead vehicle和ego vehicle,如下图所示

下面我们先推导一下,然后再进行仿真验证。
5.1 Derivation
设计我们的状态量为: x = [ p , v , z ] T ∈ R 3 x = [p, v, z]^T \in \mathbb{R}^3 x=[p,v,z]T∈R3,系统的微分方程为:
{ p ˙ = v v ˙ = u − F r ( v ) m , F r ( v ) = f 0 + f 1 v + f 2 v 2 z ˙ = v 0 − v \left\{ \begin{align*} \dot{p} & = v \\ \dot{v} & = \frac{u - F_r(v)}{m}, \quad F_r(v) = f_0 + f_1 v + f_2 v^2 \\ \dot{z} & = v_0 - v \end{align*} \right. ⎩ ⎨ ⎧p˙v˙z˙=v=mu−Fr(v),Fr(v)=f0+f1v+f2v2=v0−v
其中F_r(v)是摩擦力,将微分方程写成矩阵的形式
x ˙ = [ p ˙ v ˙ z ˙ ] = [ v − 1 m F r ( v ) v 0 − v ] + [ 0 1 m 0 ] u \dot{x} = \begin{bmatrix} \dot{p} \\ \dot{v} \\ \dot{z} \\ \end{bmatrix} = \begin{bmatrix} v \\ -\frac{1}{m} F_r(v) \\ v_0 - v \end{bmatrix} + \begin{bmatrix} 0 \\ \frac{1}{m} \\ 0 \end{bmatrix} u x˙= p˙v˙z˙ = v−m1Fr(v)v0−v + 0m10 u
为了保障系统的安全性,给系统的输入做如下的限制
− m c d g ≤ u ≤ m c a g -mc_dg \le u \le mc_ag −mcdg≤u≤mcag
ego vehicle的目标速度为
v → v d v \to v_d v→vd
最小安全距离必须满足时间前瞻量的限制 T h T_h Th
z ≥ T h v z \ge T_h v z≥Thv
系统的平衡点 x e = [ ⋅ , v d , ⋅ ] T x_e = [\cdot, v_d, \cdot]^T xe=[⋅,vd,⋅]T设计Lyapunov Function V ( x ) V(x) V(x)
V ( x ) = ( v − v d ) 2 V ˙ ( x ) = ∇ V ( x ) x ˙ \begin{align*} V(x) & = (v - v_d)^2 \\ \dot{V}(x) & = \nabla V(x) \dot{x} \\ \end{align*} V(x)V˙(x)=(v−vd)2=∇V(x)x˙
其中
∇ V ( x ) = [ 0 , 2 ( v − v d ) , 0 ] x ˙ = [ v − 1 m F r ( v ) v 0 − v ] + [ 0 1 m 0 ] u \nabla V(x) = [0, 2(v-v_d), 0] \\ \dot{x} = \begin{bmatrix} v \\ -\frac{1}{m} F_r(v) \\ v_0 - v \end{bmatrix} + \begin{bmatrix} 0 \\ \frac{1}{m} \\ 0 \end{bmatrix}u ∇V(x)=[0,2(v−vd),0]x˙= v−m1Fr(v)v0−v + 0m10 u
然后我们可以获得
L f V ( x ) = − 2 m F r ( v ) ( v − v d ) L g V ( x ) = 2 m ( v − v d ) L_f V(x) = -\frac{2}{m} F_r(v)(v-v_d) \\ L_g V(x) = \frac{2}{m} (v-v_d) LfV(x)=−m2Fr(v)(v−vd)LgV(x)=m2(v−vd)
所以CLF的约束 inf u ∈ U [ L f V ( x ) + L g V ( x ) u ] + λ V ( x ) ≤ 0 \inf_{u\in U} \quad[L_f V(x) + L_g V(x)u] + \lambda V(x) \le 0 infu∈U[LfV(x)+LgV(x)u]+λV(x)≤0可以表示为
inf u ∈ U ( v − v d ) [ 2 m ( u − F r ) + λ ( v − v d ) ] ≤ 0 \inf_{u\in U} \quad(v-v_d) [\frac{2}{m} (u-F_r) + \lambda (v-v_d)] \le 0 u∈Uinf(v−vd)[m2(u−Fr)+λ(v−vd)]≤0
保障安全性的目标是 z ≥ T h V z\ge T_h V z≥ThV,则设计CBF
B ( x ) = z − T h V B(x) = z - T_h V B(x)=z−ThV
则有
∇ B ( x ) = [ 0 , − T h , 1 ] L f B ( x ) = T h m F r + ( v 0 − v ) , L g B ( x ) = − T h m \nabla B(x) = [0, -T_h, 1] \\ L_f B(x) = \frac{T_h}{m} F_r + (v_0 - v), \quad L_g B(x) = -\frac{T_h}{m} ∇B(x)=[0,−Th,1]LfB(x)=mThFr+(v0−v),LgB(x)=−mTh
所以CBF的约束 sup u ∈ U [ L f B ( x ) + L g B ( x ) u ] + γ B ( x ) ≥ 0 \sup_{u\in U} \quad [L_f B(x) + L_g B(x)u] + \gamma B(x) \ge 0 supu∈U[LfB(x)+LgB(x)u]+γB(x)≥0 可以表示为
T h m ( F r − u ) + ( v 0 − v ) + γ ( z − T h v ) ≥ 0 \frac{T_h}{m}(F_r - u) + (v_0 - v) + \gamma (z - T_h v) \ge 0 mTh(Fr−u)+(v0−v)+γ(z−Thv)≥0
忽略 F r F_r Fr,当 u = − m c d g u=-mc_dg u=−mcdg的时候,CBF的约束可以表示为
T h c d g + v 0 + γ z − ( 1 + T h γ ) v T_h c_d g + v_0 + \gamma z - (1+T_h \gamma)v Thcdg+v0+γz−(1+Thγ)v
当 v v v足够大的时候,可能会导致CBF的约束小于0,所以我们需要重新设计CBF
B ( x ) = z − T h v − 1 2 ( v − v 0 ) 2 c d g B(x) = z - T_hv - \textcolor{blue}{\frac{1}{2} \frac{(v-v_0)^2}{c_dg}} B(x)=z−Thv−21cdg(v−v0)2
则有
B ˙ ( x , u ) = 1 m ( T h + v − v 0 c d g ) ( F r ( v ) − u ) + ( v 0 − v ) \dot{B}(x,u) = \frac{1}{m} (T_h + \textcolor{blue}{\frac{v-v_0}{c_dg}})(F_r(v) - u) + (v_0 - v) B˙(x,u)=m1(Th+cdgv−v0)(Fr(v)−u)+(v0−v)
当 u = − m c d g u=-mc_dg u=−mcdg的时候, B ˙ ( x , u ) = 1 m T h F r + T h c d g > 0 \dot{B}(x,u) = \frac{1}{m}T_h F_r + T_h c_dg > 0 B˙(x,u)=m1ThFr+Thcdg>0,所以此CBF是一个可行的CBF,那么我们最终获得的CLF-CBF-QP为
arg min u T H u s.t. ( v − v d ) [ 2 m ( u − F r ) + λ ( v − v d ) ] ≤ 0 1 m ( T h + ( v − v 0 ) c d g ) ( F r − u ) + ( v 0 − v ) + γ ( z − T h v ) ≥ 0 − m c d g ≤ u ≤ m c a g \begin{align*} \arg\min & \quad u^T Hu \\ \text{s.t.} & \quad (v-v_d)[\frac{2}{m}(u-F_r) + \lambda(v-v_d)] \le 0 \\ & \quad \frac{1}{m}(T_h + \frac{(v-v_0)}{c_d g})(F_r - u) + (v_0 - v) + \gamma (z - T_h v) \ge 0 \\ & \quad -m c_d g \le u \le m c_a g \end{align*} argmins.t.uTHu(v−vd)[m2(u−Fr)+λ(v−vd)]≤0m1(Th+cdg(v−v0))(Fr−u)+(v0−v)+γ(z−Thv)≥0−mcdg≤u≤mcag
5.2 Simulation
使用python来编写脚本代码,使用cvxopt凸优化的库来进行求解,具体可以参考cvxopt的wiki官网。
import numpy as np
import matplotlib.pyplot as plt
from cvxopt import matrix, solvers
# Simulation parameters
dt = 0.02
T = 30
length = int(np.ceil(T / dt))
# System initialization
p = np.zeros((length + 1, 1))
v = np.zeros((length + 1, 1))
z = np.zeros((length + 1, 1))
u = np.zeros((length, 1))
sys = {
'm': 1650,
'g': 9.81,
'v0': 14,
'vd': 24,
'f0': 0.1,
'f1': 5,
'f2': 0.25,
'ca': 0.3,
'cd': 0.3,
'T': 1.8,
'clf_rate': 5,
'cbf_rate': 5,
'weight_input': 2 / 1650**2,
'weight_slack': 2e-2
}
sys['u_max'] = sys['ca'] * sys['m'] * sys['g']
sys['u_min'] = -sys['cd'] * sys['m'] * sys['g']
# Initial conditions
p[0] = 0
v[0] = 10
z[0] = 100
# Simulation loop
for i in range(length):
current_p = p[i, 0]
current_v = v[i, 0]
current_z = z[i, 0]
x = np.array([current_p, current_v, current_z])
F_r = sys['f0'] + sys['f1'] * current_v + sys['f2'] * current_v**2
f = np.array([current_v, -F_r / sys['m'], sys['v0'] - current_v])
g = np.array([0, 1 / sys['m'], 0])
V = (current_v - sys['vd'])**2
dV = np.array([0, 2 * (current_v - sys['vd']), 0])
LfV = np.dot(dV, f)
LgV = np.dot(dV, g)
B = current_z - sys['T'] * current_v - 0.5 * (current_v - sys['v0'])**2 / (sys['cd'] * sys['g'])
dB = np.array([0, -sys['T'] - (current_v - sys['v0']) / (sys['cd'] * sys['g']), 0])
LfB = np.dot(dB, f)
LgB = np.dot(dB, g)
# Quadratic program
H_ = np.array([[sys['weight_input'], 0],
[0, sys['weight_slack']]])
f_ = np.array([-sys['weight_input'] * F_r, 0])
A_ = np.array([[LgV, -1],
[-LgB, 0],
[1, 0],
[-1, 0]])
b_ = np.array([-LfV - sys['clf_rate'] * V,
LfB + sys['cbf_rate'] * B,
sys['u_max'],
-sys['u_min']])
# Convert to cvxopt format
P = matrix(H_)
q = matrix(f_)
G = matrix(A_)
h = matrix(b_)
# Solve QP problem using cvxopt
sol = solvers.qp(P, q, G, h)
u_opt = sol['x'][0] # Second term is the slack variable
dx = f + g * u_opt
x_n = x + dx * dt
# Save data
u[i, 0] = u_opt
if i < length:
p[i + 1, 0] = x_n[0]
v[i + 1, 0] = x_n[1]
z[i + 1, 0] = x_n[2]
# Plotting
time = np.arange(0, T + dt, dt)
plt.figure(figsize=(10, 8))
plt.subplot(4, 1, 1)
plt.plot(time, p)
plt.ylabel('p')
plt.subplot(4, 1, 2)
plt.plot(time, v)
plt.ylabel('v')
plt.subplot(4, 1, 3)
plt.plot(time, z)
plt.ylabel('z')
plt.subplot(4, 1, 4)
plt.plot(time[:-1], u)
plt.ylabel('u')
plt.xlabel('Time (s)')
plt.tight_layout()
plt.show()
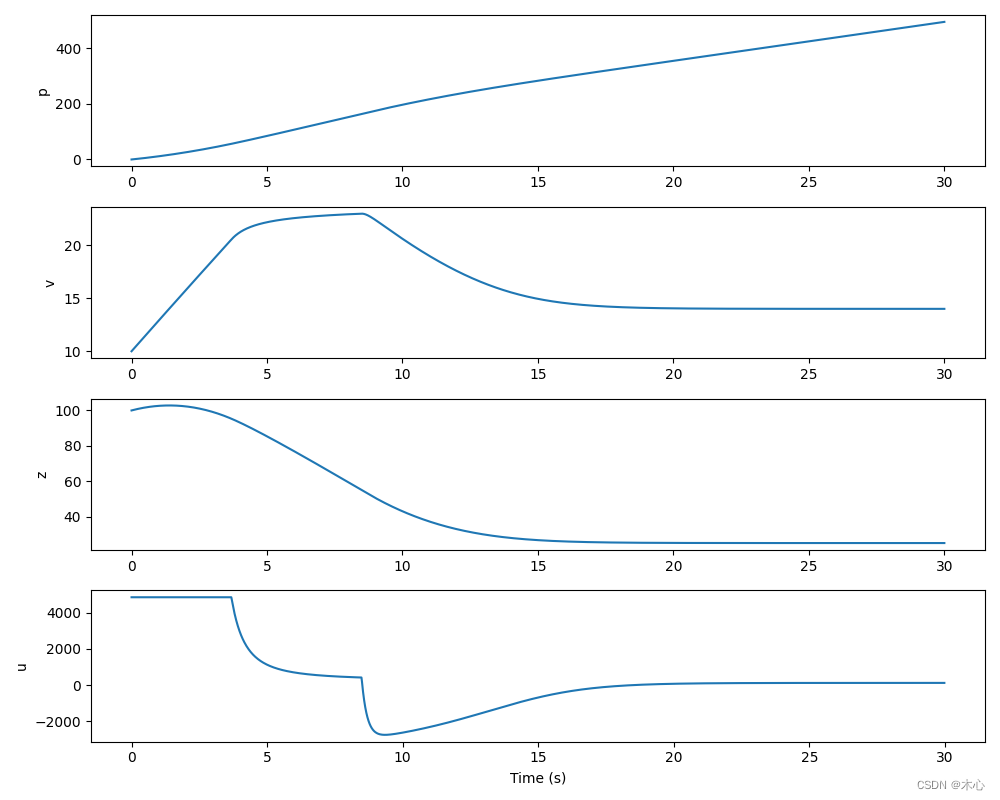
最后的结果如下
Reference
[1]Jason Choi – Introduction to Control Lyapunov Functions and Control Barrier Functions
[2]CBF-CLF-Helper
![[openwrt-21.02]openwrt-21.02 make menuconfig不显示luci-app-firewall问题分析及解决方案](https://img-blog.csdnimg.cn/direct/9ab8ea1ebf774af192f74de862c74a69.png)