一、概述
1.1背景
随着数字经济的快速发展和全社会数字化水平的升级,人工智能的积极作用越来越凸显,人工智能与各个行业的深度融合已成为促进传统产业转型升级的重要方式之一。ChatGPT的出现掀起了又一波人工智能发展热潮,人工智能行业发展势头强劲,市场规模持续上升,正逐步进入效率化生产阶段,为用户带来了更加个性化的服务和产品。
近年来,中国人工智能行业受到各级政府的高度重视和国家产业政策的重点支持,国家陆续出台了多项政策,鼓励人工智能行业发展与创新,《关于支持建设新一代人工智能示范应用场景的通知》《关于加快场景创新以人工智能高水平应用促进经济高质量发展的指导意见》《新型数据中心发展三年行动计划(2021-2023年)》等产业政策为我国人工智能产业发展提供了长期保障。而人工智能结合机器人,成为产业发展风向标,使机器人具有“智慧”,服务日常生活,成为机器人产业发展的流行趋势。
2023年1月《“机器人+”应用行动实施方案》指出,当前,机器人产业蓬勃发展,正极大改变着人类生产和生活方式,为经济社会发展注入强劲动能。预计到2025年,制造业机器人密度较2020年实现翻番,服务机器人、特种机器人行业应用深度和广度显著提升,机器人促进经济社会高质量发展的能力明显增强。
在智慧零售领域,大模型技术具有数据处理能力强、预测准确度高、智能化水平高等显著优势。通过构建庞大的数据集和复杂的算法模型,大模型能够实现对市场趋势的准确预测以及商品库存的智能管理,同时能够根据消费者的购物历史和偏好,提供定制化的购物体验,从而提高销售额和顾客满意度。
1.2简介
以大模型技术与机器人技术在“智慧零售”这一垂直领域应用的实际需求为应用背景,模拟在无人零售店等新型零售模式场景中,大模型通过分析消费者行为数据,提供个性化的商品推荐;通过图生文技术和自然语言处理技术,提高交互效率和便捷性;通过智能机械臂完成对商品的识别、定位与抓取,通过图像识别技术实现商品识别和结算,提高购物体验,最终实现协助零售商户智能识别客户需求。功能如下:
- 智慧视觉辨识:利用大模型的强大计算能力和视觉识别技术,系统能够实现对货架上商品的高精度识别,确保每一个商品都能被精确地辨识和分类。
- 环境感知物体跟踪:结合大模型与深度学习算法,本功能可实时检测并追踪货架上商品的位置和状态,为智能物流和库存管理提供实时数据。
- 互动式语音交互:通过大模型集成的自然语言处理能力,平台可通过自然且友好的语音交互与用户沟通,提供即时信息反馈和导购服务。
- 洞察消费者辅助决策:利用大模型根据顾客行为、面部表情分析,生成消费者洞察报告,帮助零售商理解顾客需求,优化商品组合。
- 智能精准操控:以大模型技术为支撑,智能机械臂能够自动精准地识别目标商品,并完成复杂的抓取与搬运任务,展现了先进的自动化操作能力。
- 智能化结算分析:此功能集结大模型的数据分析和图像识别技术,能够在短时间内完成对结算区商品的自动识别和计价,提供一站式智能结算解决方案。
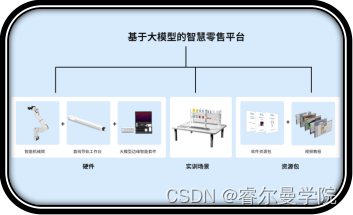
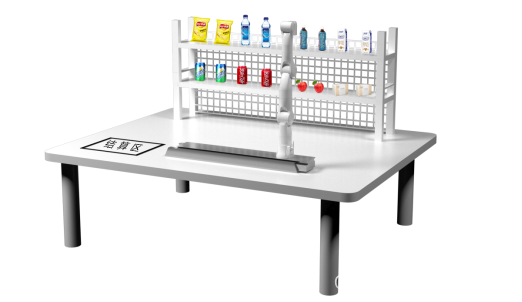
图1 .基于大模型的智慧零售教育科研平台
1.3特点
1.3.1
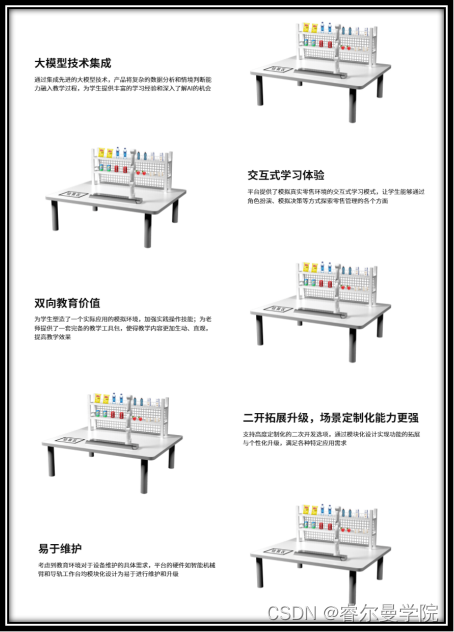
基于大模型的智慧零售教育科研平台集主控与执行机构与一体,主控中采用目前主流的大模型与图文生成技术,通过自然语言处理,实现对外部环境的感知与分析;执行机构使用超轻量仿人机械臂,基于目标检测技术,通过机械臂运动规划等功能,完成任务执行与环境交互功能。基于大模型的智慧零售教育科研平台同时具备商业应用、教学实训及科研实验的特性,是融合应用与科教一体的平台,因此其支持各类型高校专业实训、课程设计、毕业设计等实训环节的教学,也满足各科研院所基础实验测试及二次开发需求,实训平台主要有以下优势:
- 多功能性:基于大模型的智慧零售教育科研平台可以执行多种任务,包括语音交互、视觉抓取等。
- 智能化技术支持:基于大模型的智慧零售教育科研平台集成了人工智能技术,例如机器视觉、深度学习及大模型等前沿技术,能够实现环境感知和自主决策,提升实验的智能化水平,并且对于前沿的人工智能技术具备良好的适配性,各类最新智能算法及AI解决方案能够轻松在平台上验证,对于高层次人才培养和深度科研探索有坚实的基础支撑。
- 灵活性:平台结构设计灵活,可以在不同工作场景下自由移动和操作,适用于多种实验和项目需求。
- 自动化程度高:基于大模型的智慧零售教育科研平台具备自动化控制功能,能够通过编程实现自动化操作和任务执行,提高实验效率和精度。
- 跨学科应用:基于大模型的智慧零售教育科研平台涵盖了人工智能、控制工程、计算机等多个学科领域的知识和技术,可以为跨学科的实验和项目提供支持。
- 实践创新教学:基于大模型的智慧零售教育科研平台为学生提供了实践创新的平台,可以进行项目设计、编程控制、系统集成等实践操作,培养学生的创新能力和实践技能。
- 设备迭代更新:基于大模型的智慧零售教育科研平台采用模块化组成思想,每个组成部分都能够单独运行使用,因此后续升级与适配十分方便,用户无需整套返厂更新,使用配套器件即可更新硬件与软件。
- 教学资料配套:基于大模型的智慧零售教育科研平台教学科研平台配套各类型教学资料,包括实训文档、开发文档、实训讲解视频、二次开发实践视频以及实践讲师现场教学等全面的教学支撑,为客户群体提供人性化与定制化的使用与开发服务。
- 实训平台生态圈:基于大模型的智慧零售教育科研平台教学科研平台提供全方位的生态圈,用户可自行定制与替换各部件,以便完成特定的场景需求,并且基于大模型的智慧零售教育科研平台教学科研平台拥有独立的产品生态论坛,用户可以随时在论坛查找相关生态产品资料以及开发资料,极大地减少客户二次开发应用难度及周期。

1.3.2竞赛支持
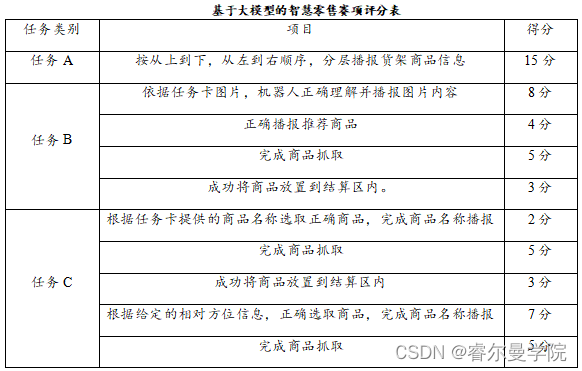
“中国机器人及人工智能大赛(CAAI)”是国内首个提出在机器人及人工智能领域,将关键技术的研发与应用有机结合的比赛。自1999年至2023年,中国机器人及人工智能大赛已成功举办了25届,已有600多所高校参与,累计超27万高校学生参赛是目前国内规模最大,影响力最强,专业水平最高的机器人竞赛。参赛院校及师生均可享受A类赛事奖励政策,其涉及计算机、电子、机械、信息、无人机、人工智能等方面,是多学科知识的本融合型大赛。产品能全面支撑师生参与CAAI的基于大模型的智慧零售赛项。
智慧零售竞赛场景设置如下图所示,货架上摆放有矿泉水、可乐、薯片、牛奶等日常零售柜商品,直线导轨台放置在货架前方,机械臂固定在直线导轨台上,可水平移动。具体尺寸、商品类型、商品价格以后续赛事群公布为准。


1.4资源
基于大模型的智慧零售教育科研平台配套全面的实训内容与资料,为教育客户群体提供涵盖机器人工程、人工智能、自动化、计算机、通信工程、电子信息等专业的课程教学与实训实验资源,并且提供产品论坛,用户可在论坛中交流与查找相关资料,产品的更新资料也会同步至论坛中,方便用户查收。
1.4.1课程
基于大模型的智慧零售教育科研平台提供系统性的教学实验实训内容,包括实训文档及实训视频,深入浅出的讲解基于大模型的智慧零售教育科研平台相关原理与开发流程,以下是部分课程资源概览:
| 主题 | 课程 | 内容(简述) | 课时 |
| 中控系统教学实训 | Linux系统基础 |
| 4 |
| Python基础 |
| 4 | |
| ROS操作系统 |
| 16 | |
| 物联网平台 |
| 8 |
| 主题 | 课程 | 内容(简述) | 课时 |
| 视觉系统教学实训 | 视觉传感器认知 |
| 4 |
| 深度相机技术应用 |
| 4 | |
| 深度学习及视觉识别技术 |
| 8 | |
| 视觉识别二维码及颜色 |
| 6 | |
| 手眼标定 |
| 2 |
| 主题 | 课程 | 内容(简述) | 课时 |
| 操作机构系统教学实训 | 执行机构本体 | 1.六轴机械臂简介及本体认知; 2.六轴机械臂通讯方法; 3.六轴机械臂示教器使用基础; 4.六轴机械臂示教器编程; | 8 |
| 机械臂仿真系统 | 1.ROS机器人操作系统简介及认知; 2.RVIZ中显示机械臂模型; 3.使用Moveit工具编程; 4.Moveit控制Gazebo中的仿真机械臂; 5.Moveit仿真避障规划; | 16 | |
| 执行机构二次开发 | 1.JSON协议应用; 2.机械臂API应用; 3.机械臂透传移动控制; 4.在线编程及拖动轨迹文件编程; | 16 | |
| 执行机构集成技术 | 1.机械臂控制器对外接口应用; 2.机械臂末端对外接口应用; 3.机械臂集成2指夹爪及五指灵巧手应用; 4.机械臂集成真空吸盘应用; | 8 |
| 主题 | 课程 | 内容(简述) | 课时 |
| 智慧零售竞赛套件应用实训内容 | 机器人组成原理 | 1.机器人系统理论介绍; 2.机械臂运动规划详解及应用; | 4 |
| ROS机器人 操作系统 | 1.ROS通信原理; 2.moveit轨迹规划实践应用; 3.Gazebo仿真实践; | 4 | |
| 视觉抓取 |
| 8 | |
| 二次开发实训 |
| 8 |