Kinect与TOF、双目、结构光相机比较相机国产、非国产统计参数对比分析
Kinect v1和Kinect v2之间的参数比较
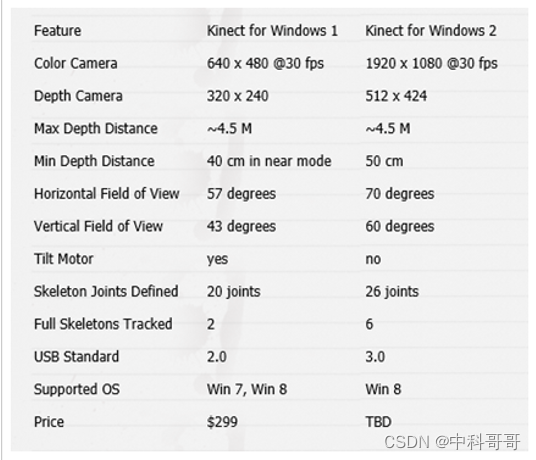
从图中可以看出,Kinect v2的表现比Kinect v1要好得多:首先最令人印象深刻的是分辨率的提高,v2达到了1080p,甚至视野也大大增加了。此外Kinect v2在FOV也有许多杰出方面:如果有人在它前面移动,它总是能精准捕捉;而Kinect v1如果有人在一侧移动太多,它则会出现丢失现象。
Kinect v1的Depth传感器,采用了Light Coding的方式,读取投射的红外线pattern,通过pattern的变形来取得Depth的信息。为此,Depth传感器分为投射红外线pattern的IR Projector(左)和读取的这个的IR Camera(右)。还有Depth传感器中间还搭载了Color Camera。Light Coding是以色列的PrimeSense公司的Depth传感器技术,于2013年被美国苹果公司收购。
Kinect v2的Depth传感器,采用的是Time of Flight(TOF)的方式,通过从投射的红外线反射后返回的时间来取得Depth信息。Depth传感器看不到外观,不过Color Camera旁边是红外线Camera(左)和投射脉冲变调红外线的Porjector(右)。
Kinect v1和Kinect v2的配置比较

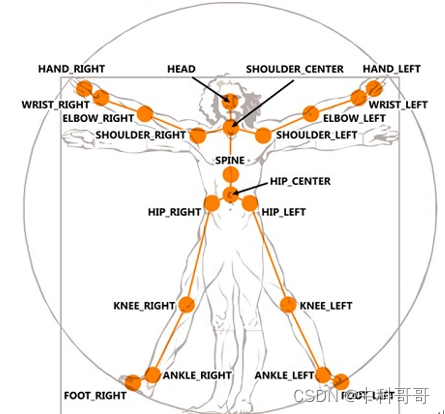
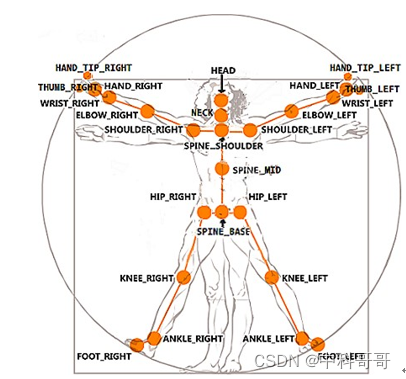
Kinect彩色摄像头可用来拍摄视角范围内的彩色视频图像,Kienct v1的分辨率为640×480,Kienct v2的分辨率为1920×1080。Kinect可用来获取用户的深度信息,Kinect v1获取的深度图像的分辨率为320×240,Kinect v2的分辨率为512×424。Kinect v1可检测到的有效范围为0.8~4.0m,Kinect v2可检测到的有效范围为0.5~4.5m,只有用户在有效范围内,Kinect才能检测到用户的存在。骨骼跟踪是Kinect“体感操作”的基础,Kinect可以跟踪到6个用户的位置信息,并且Kinect v1可以实时跟踪2个用户的详细位置信息,包括详细的姿势和骨骼点的三维坐标信息,Kinect v2可以同时跟踪6个用户的骨骼节点。Kinect v1最多可以支持20个骨骼点,Kinect v2最多可支持25个骨骼节点,数据对象类型以骨骼帧的形式提供,每一帧最多可以保存所支持的骨骼点对应的个数。Kinect v1骨骼点如图所示,Kinect v2骨骼点如图所示。
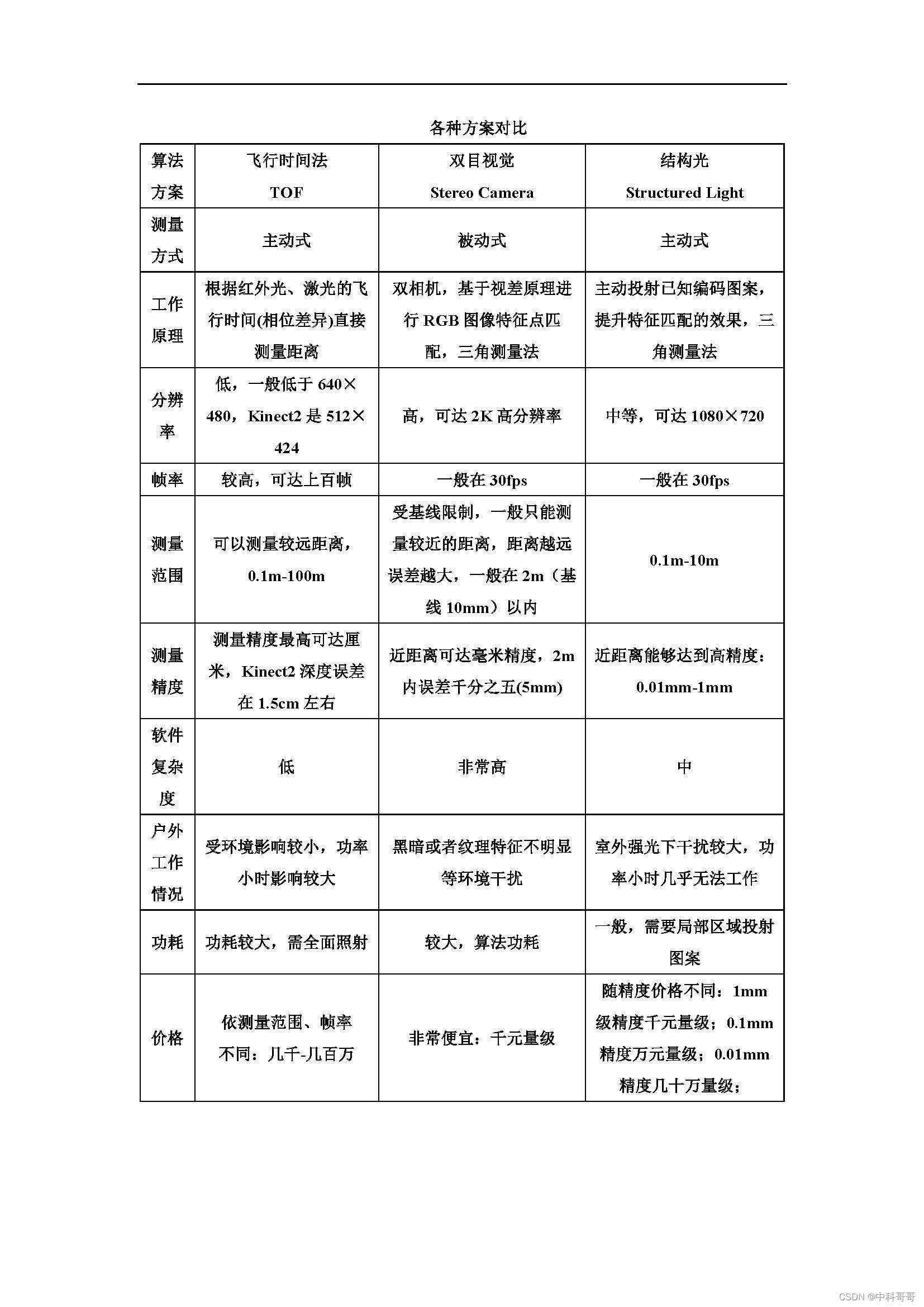
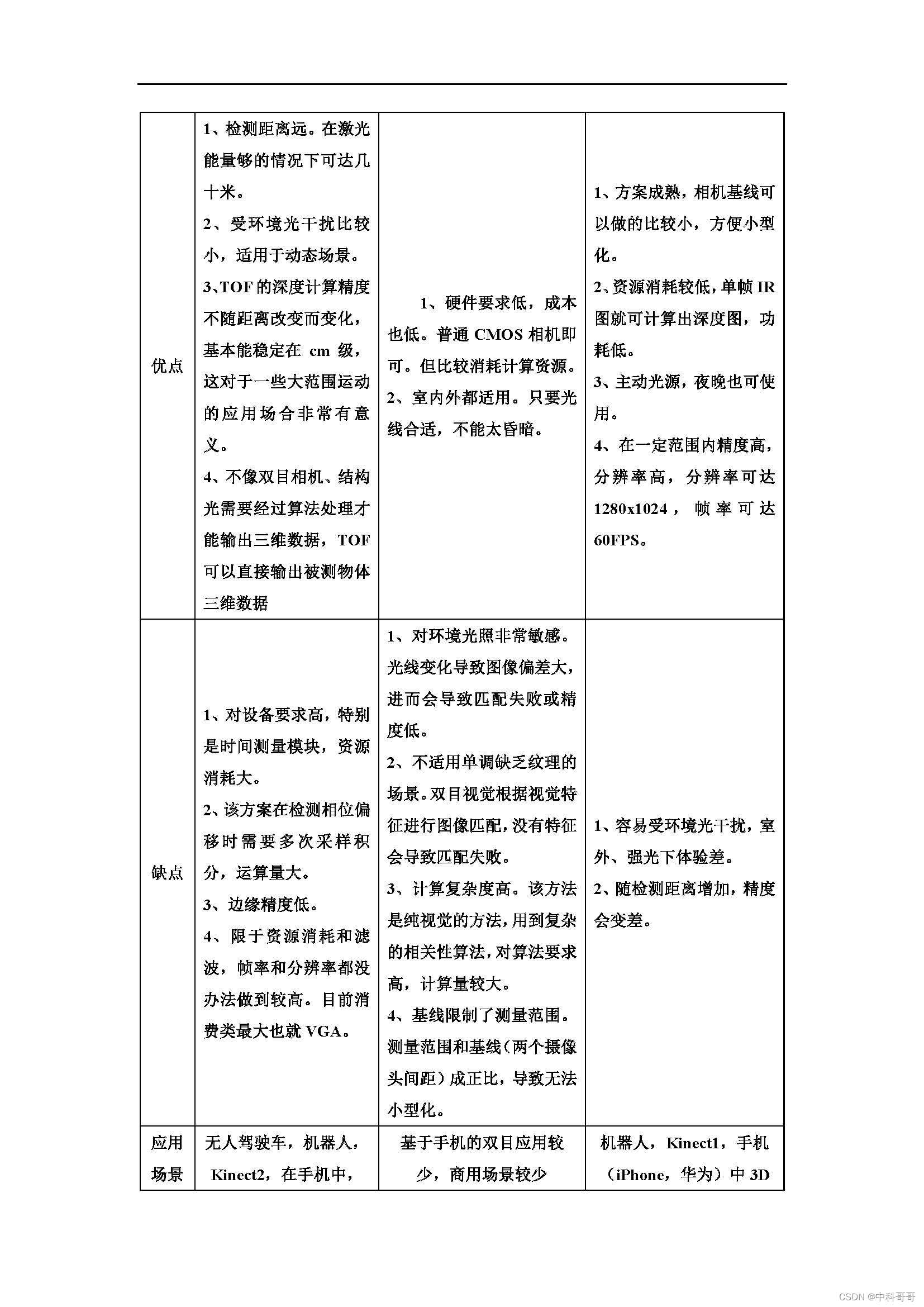
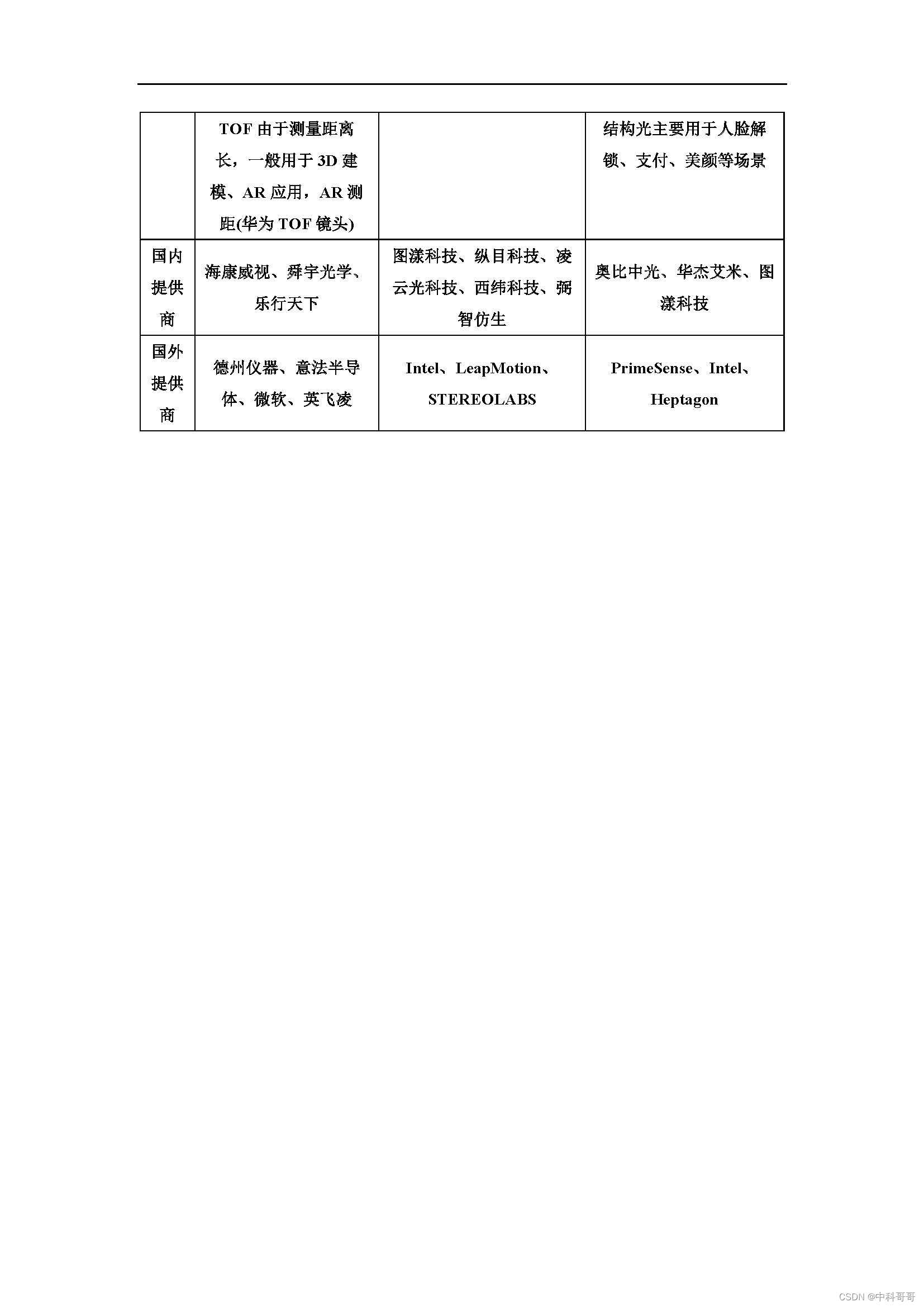
2 各方法对比总结
目前市面上常有的3D相机方案主要有3种:
(1)飞行时间法(Time of flight,TOF):代表公司微软Kinect2,PMD,SoftKinect,联想Phab,在手机中一般用于3D建模、AR应用,AR测距(华为TOF镜头)。
(2)双目视觉(Stereo Camera):代表公司Leap Motion,ZED,大疆;
(3)结构光(Structured-light):代表公司有奥比中光,苹果iPhoneX(Prime Sense),微软Kinect1,英特尔RealSense,Mantis Vision等,在手机(iPhone,华为)中3D结构光主要用于人脸解锁、支付、美颜等场景。
各种方案的测量原理、光源、精度与距离、优缺点、应用领域等如下表所示: