1.开发板资料
- 开发板资源
- 产品介绍主页:http://www.orangepi.cn/html/hardWare/computerAndMicrocontrollers/details/Orange-Pi-AIpro.html
- 开发板案例源码:https://gitee.com/ascend/EdgeAndRobotics
- 工具&原理图&案例源码&开发手册:http://www.orangepi.cn/html/hardWare/computerAndMicrocontrollers/service-and-support/Orange-Pi-AIpro.html
- 转存的镜像资源:夸克网盘 提取码:XTw3
- 论坛资源
- Orange Pi论坛:http://forum.orangepi.cn/
- 昇腾论坛--香橙派AIpro学习资源一站式导航:https://www.hiascend.com/forum/thread-0285140173361311056-1-1.html
2.简易开箱
- 怀着激动的心打开快递盒,里面赫然躺着香橙派AIpro全家福:一个65W的充电头,一根数据线,一个Orange Pi AIpro(8G)本体,真正做到了开箱即用(零售版电源和扇热模块需要单独购买)

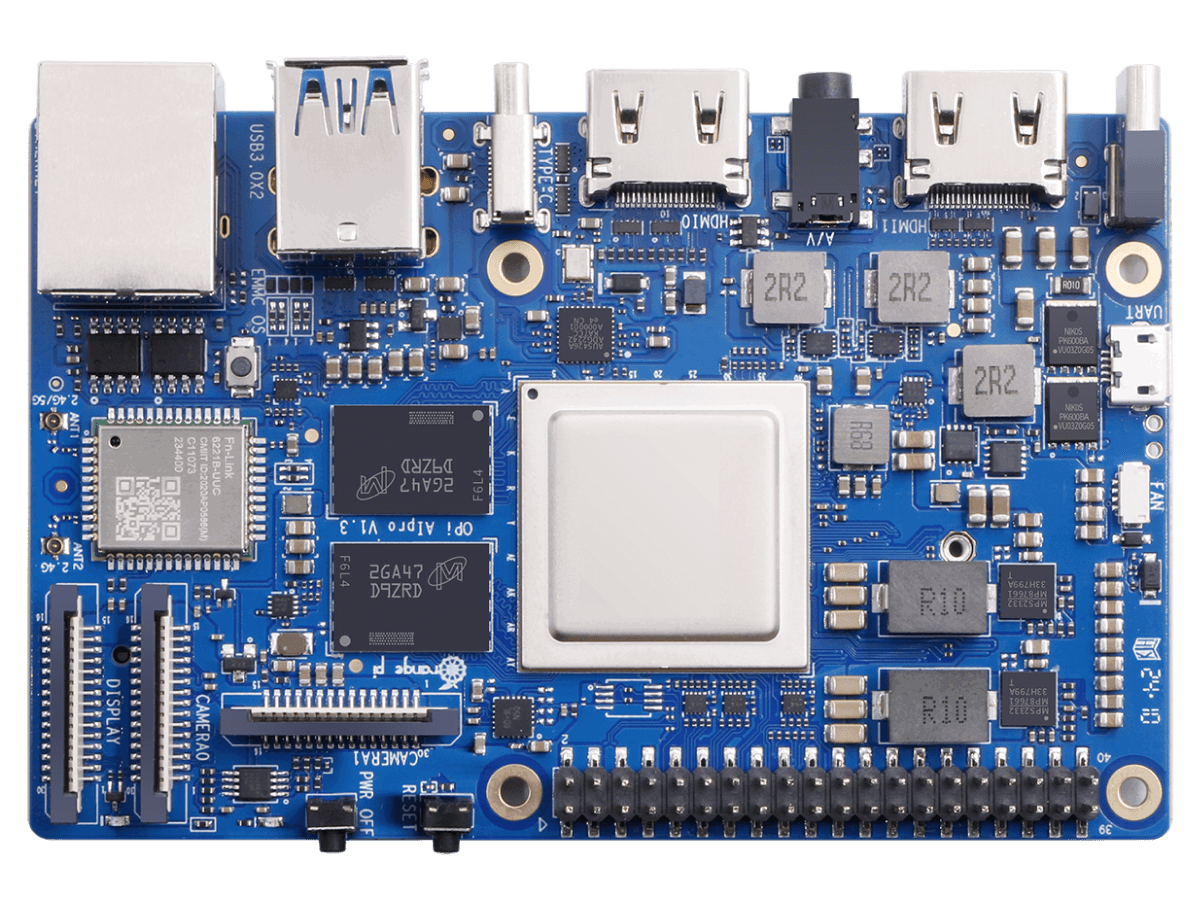
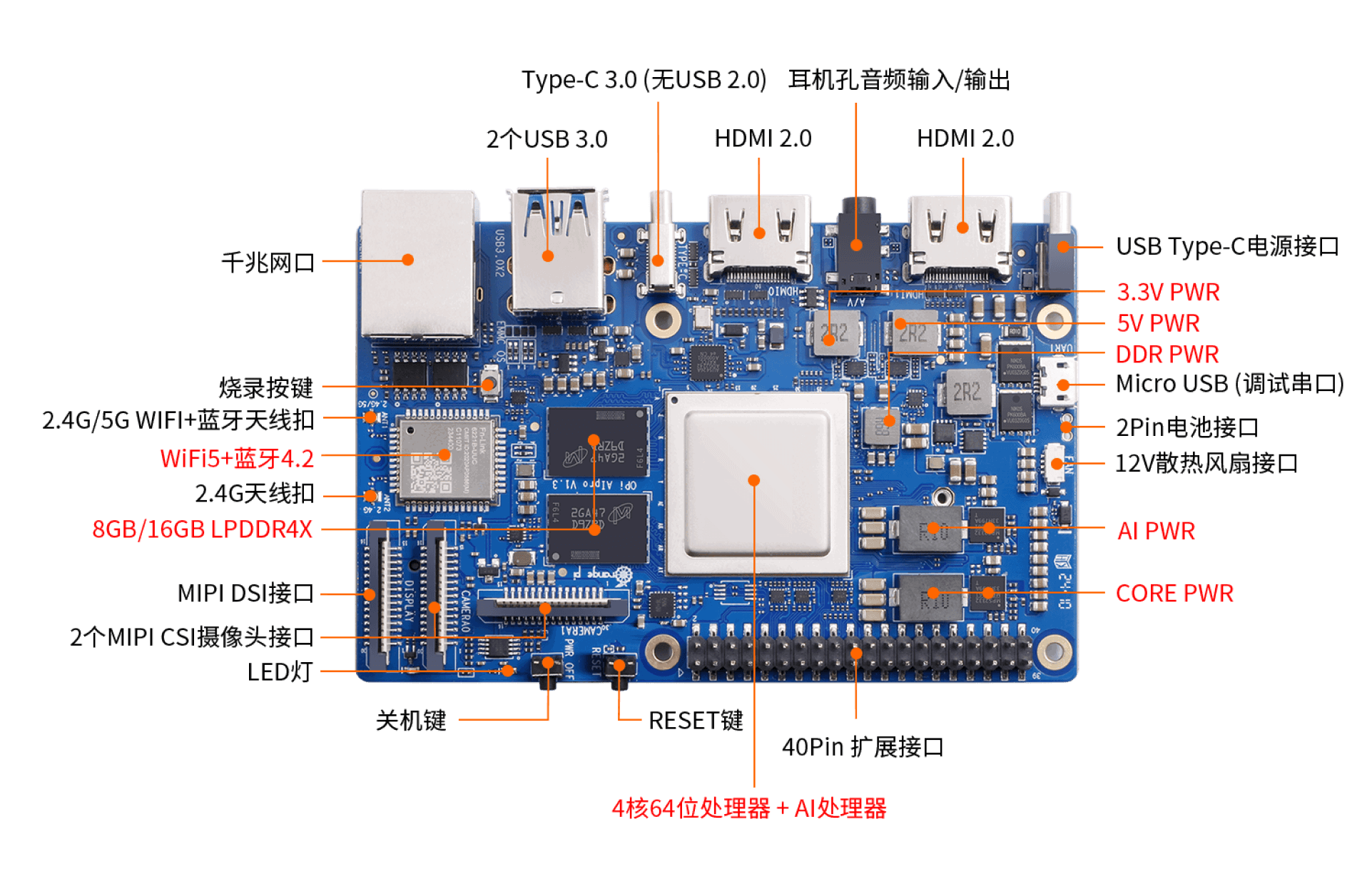
- 正面接口一览图如下,接口朝前从左边往右依次是Type-C电源接口,HDMI1 2.0,3.5mm音频接口,HDMI0 2.0,Type-C 3.0,两个个USB3.0和一个千兆网口,两个标准版的HDMI省去了额外购买其他型号的HDMI线,这个好评。板卡上还有一个Micro USB,方便串口调试,一个MIPI DSI接口(MIPI-DSI是一种应用于显示技术的串行接口,兼容DPI、DBI和DCS)用于连接液晶屏,两个MIPI CSI接口(MIPI-CSI是一种应用于摄像头的串行接口)用于连接摄像头。接口类型丰富且全,唯一的缺点就是USB接口太少了,如果USB设备多一点就完全不够用了,需要额外接扩展坞来使用。
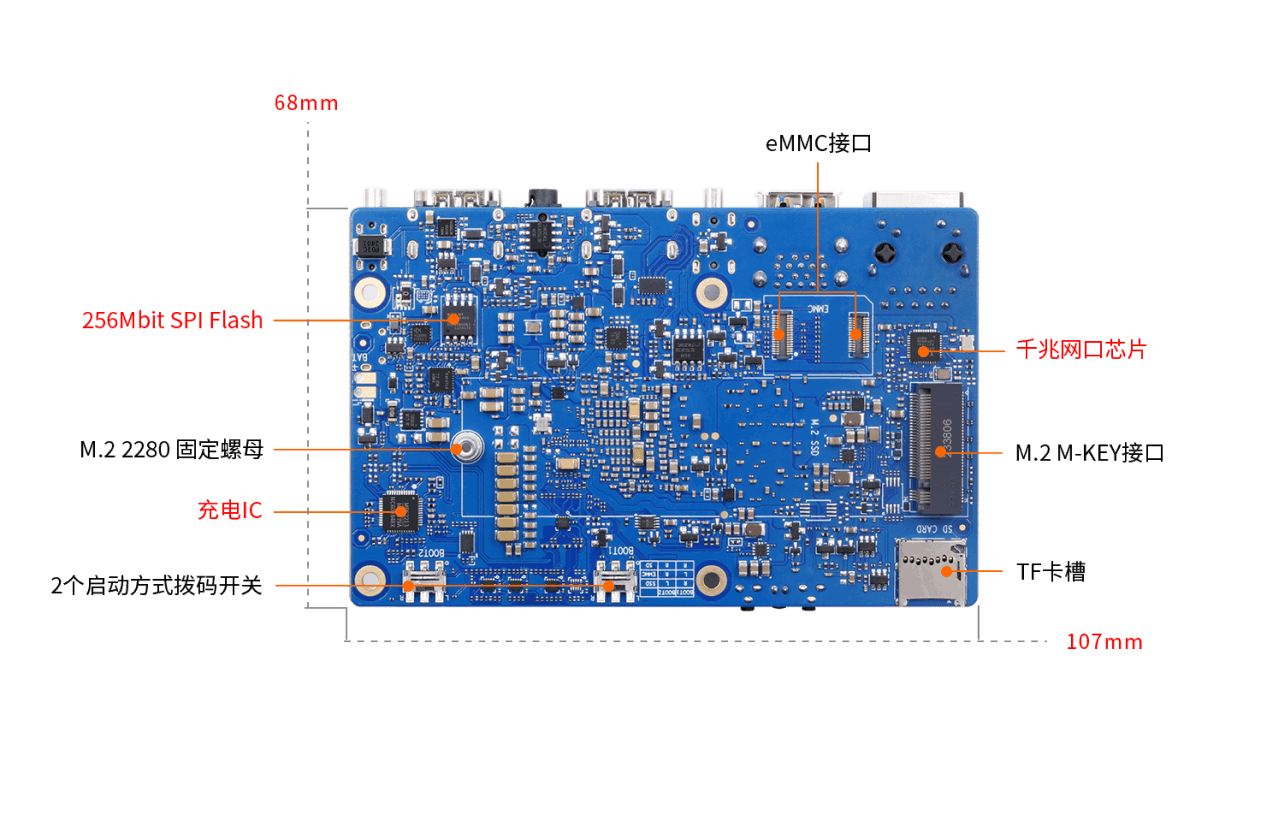
- 背面接口一览图如下,背面主要是一些储存设备接口,常用的TF卡槽,支持2280规格NVMe SSD的PCle3.0 M2接口(手册说目前只支持三星的SSD固态,其余固态支持需要后续版本更新)和eMMC接口(eMMC储存模块可以在香橙派的淘宝店中购买:购买链接)
3.初步使用与环境配置
3.1 镜像烧录与设备启动
- 装备一张32G以上的TF卡(TF卡的传输速率必须为class10以上),用于烧录系统,在官方下载页面中下载**烧录软件BalenaEtcher,Ubuntu** / openeuler镜像(百度云盘限速可以从我的夸克网盘下载,提取码:XTw3),用烧录软件将镜像烧录进去然后插到背面TF卡槽即可

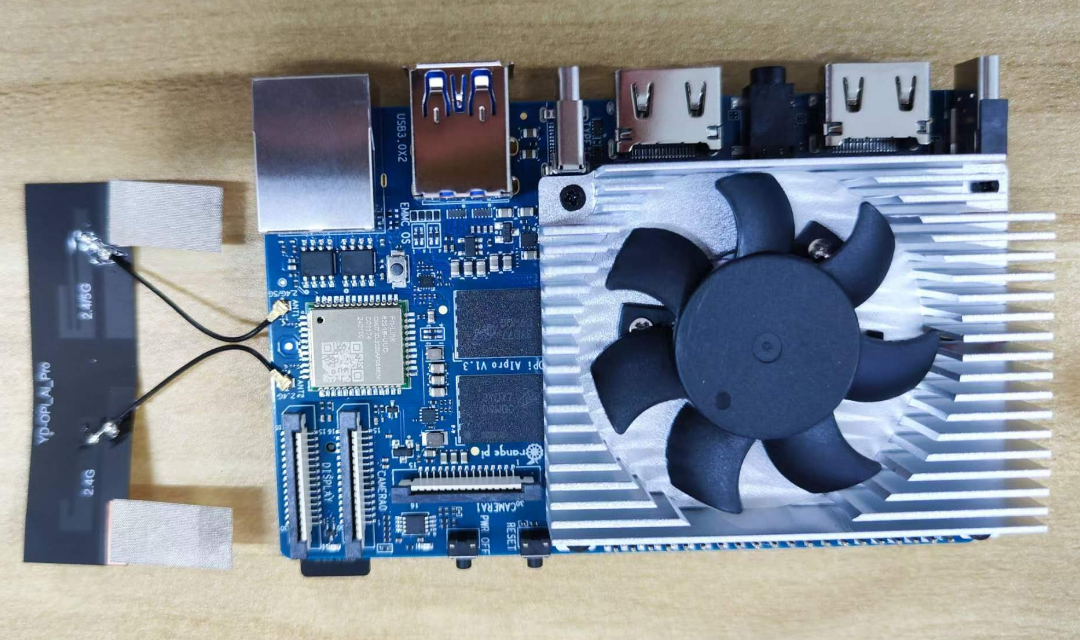
- 接上20V PD-65W电源,电源接口是在远离网口最边上的Type-c接口,用HDMI线连接显示屏跟HDMI0(靠近USB3.0一侧的HDMI,如果HDMI0没接,只接HDMI1没有显示),连接键鼠,下面就是板子插满各种管后的样子
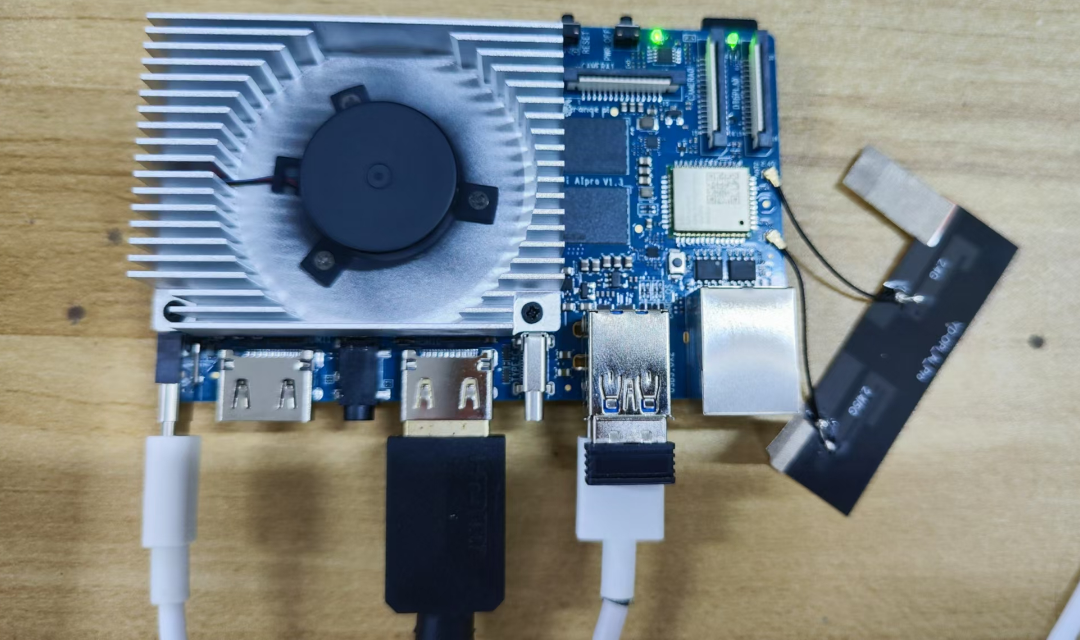
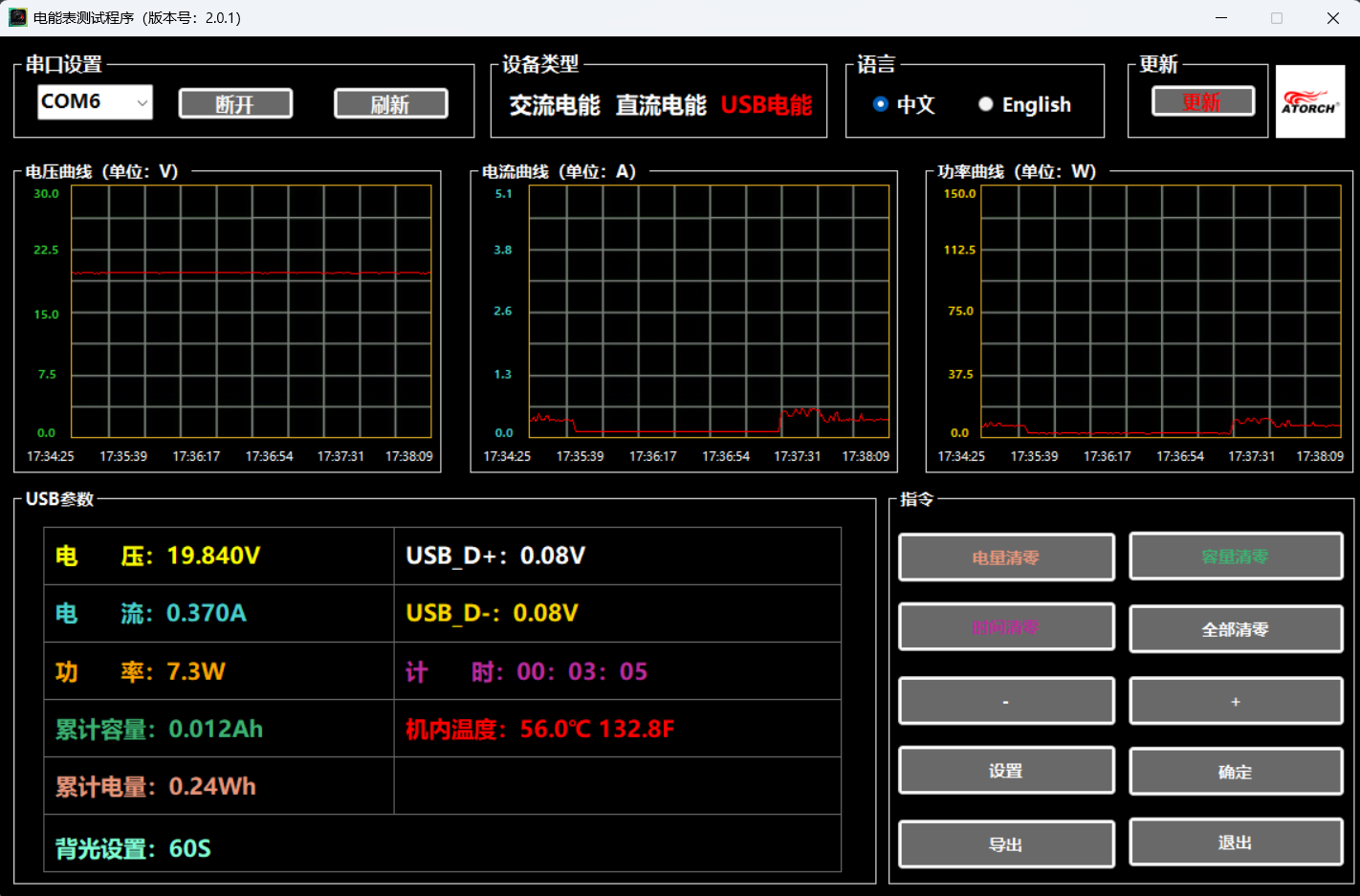
- 经测试,待机电流0.13A,功率2.6W在左右,启动电流0.55A,功率11W,开机运行电流0.37A,功率7.3W左右(值得一提的是开机风扇默认启动最高速,这种情况我只在服务器主机上见过,,,)
如果插电没有自启,按一下Reset键(相当于开机键),如果开机黑屏,检查一下启动模式是否为TF卡启动,检查背面的两个拨动开关的位置,香橙派AIpro支持三种启动设备进行启动,其余两种启动设备启动方式自行查看用户手册
拨动开关BOOT1 拨动开关BOOT2 对应启动设备 左 左 未使用 右 左 STAT SSD和NVMe SSD 左 右 eMMC 右 右 TF卡
3.2 开机三部曲
开屏默认用户名为
HwHiAiUser,密码为Mind@123,开机第一件事就是修改密码sudo passwd root # root默认密码也是Mind@123 sudo passwd HwHiAiUser第二件事就是查看系统内核和CPU架构,方便后续安装软件时做参考(linux内核为5.10.0,系统架构为aarch64,软件下载ARM64 / ARMv8 / aarch64版本即可)
(base) HwHiAiUser@orangepiaipro:~/Desktop$ uname -a Linux orangepiaipro 5.10.0+ #1 SMP Mon Feb 26 15:29:07 CST 2024 aarch64 aarch64 aarch64 GNU/Linux (base) HwHiAiUser@orangepiaipro:~/Desktop$ lscpu Architecture: aarch64 CPU op-mode(s): 64-bit Byte Order: Little Endian CPU(s): 4 On-line CPU(s) list: 0-3 Vendor ID: 0x00 Model: 2 Thread(s) per core: 1 Core(s) per cluster: 4 Socket(s): - Cluster(s): 1 Stepping: 0x1 BogoMIPS: 96.00 Flags: fp asimd evtstrm aes pmull sha1 sha2 crc32 atomics fphp a simdhp cpuid asimdrdm jscvt fcma dcpop sha3 asimddp sha51 2 sve asimdfhm ssbs sb NUMA: NUMA node(s): 3 NUMA node0 CPU(s): 0-3 NUMA node1 CPU(s): NUMA node2 CPU(s): Vulnerabilities: Itlb multihit: Not affected L1tf: Not affected Mds: Not affected Meltdown: Not affected Mmio stale data: Not affected Retbleed: Not affected Spec store bypass: Mitigation; Speculative Store Bypass disabled via prctl Spectre v1: Mitigation; __user pointer sanitization Spectre v2: Not affected Srbds: Not affected Tsx async abort: Not affected第三件事自然是安装nomachine和ssh了,这样就可以完全摆脱键鼠和显示屏独立使用了。推荐优先安装nomachine,因为nomachine会自动扫描局域网内的设备,这样就可以知道香橙派Aipro的IP地址了
Windows上安装Windows版本的nomachine(下载链接:前往),下载完成双击安装即可
香橙派Aipro上安装ARMv8版本deb包的nomachine(下载链接: 前往),下载完成通过下面的指令安装即可
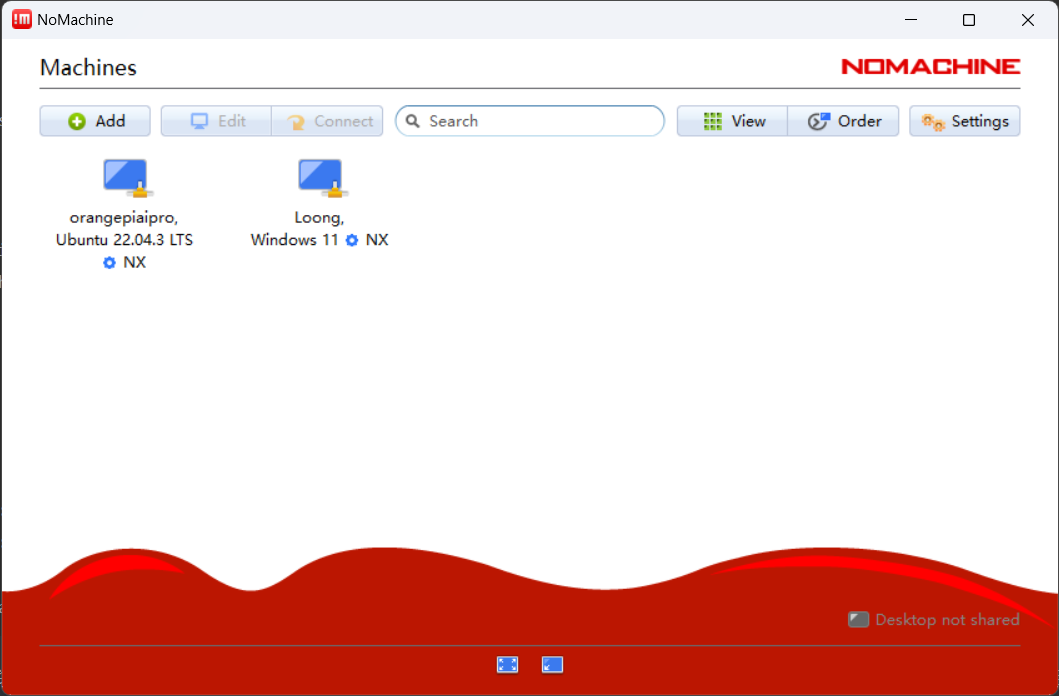
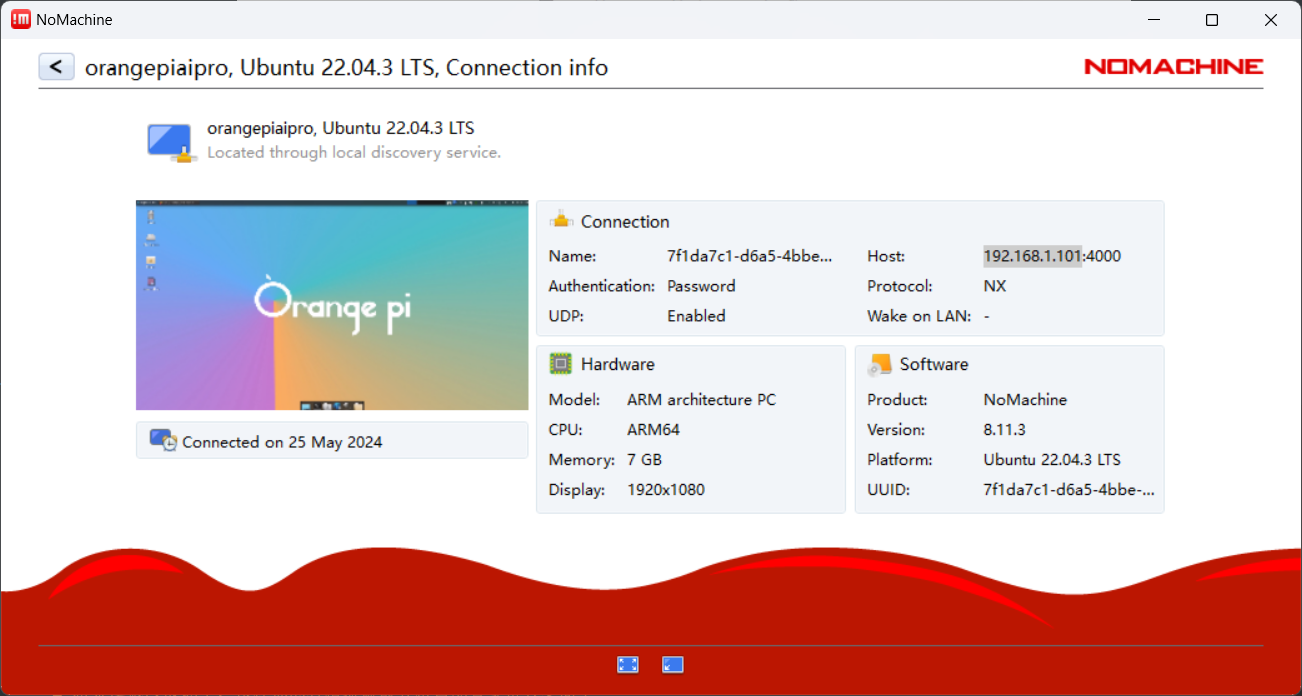
sudo dpkg -i nomachine_8.xxx_arm64.deb # 根据自己下载的文件名称和路径进行安装安装并启动后,在Windows的nomachine上即可看到香橙派Aipro设备,这时就可以完全摆脱显示屏和键鼠了
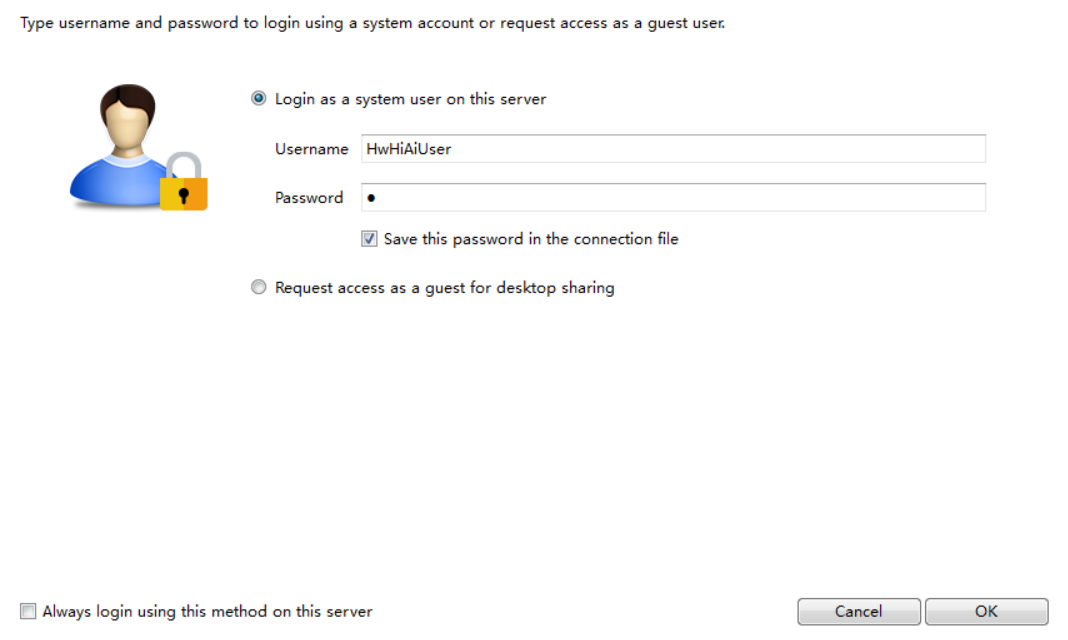
- 双击连接香橙派Aipro,输入用户名和密码
注:如果出现黑屏或者无法控制的情况,可以先试试连接显示屏后能否正常使用,如果能可以在淘宝买个HDMI诱骗器来使用
- 设置香橙派开机自动解锁屏幕进入桌面(如果不做这一步,就每次都需要连接显示屏登录用户后才能使用nomachine进行控制)
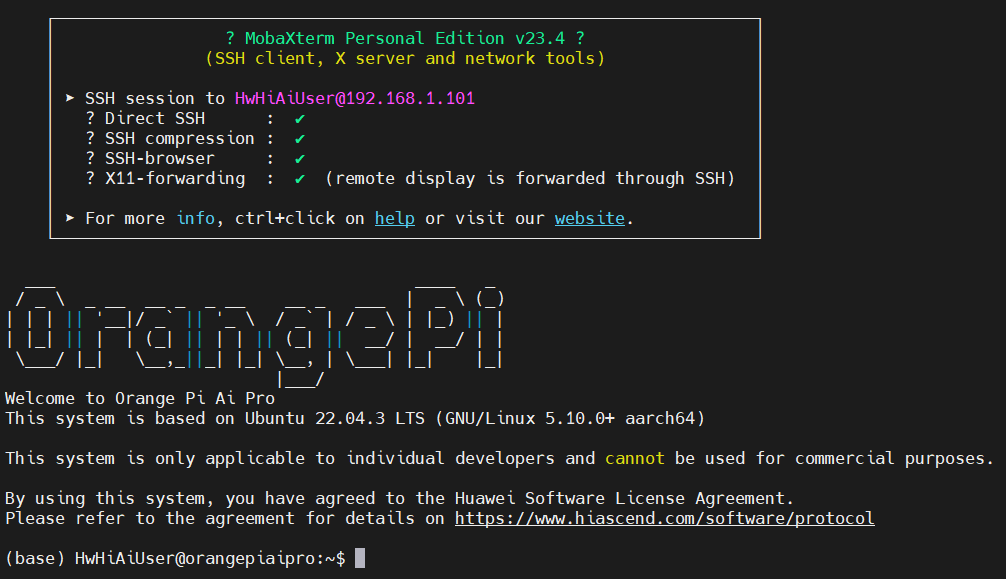
sudo vi /etc/lightdm/lightdm.conf # 在`[Seat:*]`部分添加以下行,然后保存退出 autologin-user=HwHiAiUser autologin-user-timeout=0 sudo visudo # 将末尾修改成如下,这样你的香橙派就能开机自动登录进入桌面了 HwHiAiUser ALL=(ALL) NOPASSWD: ALL - 安装ssh并通过mobaxterm【下载地址】进行连接,通过
sudo apt install openssh-server来安装ssh服务,通过nomachine右键香橙派Aipro->Connection info来查看香橙派Aipro的设备IP,防止每次IP不一样的问题
3.3 常用的编程环境
经过测试,发现官方的镜像已经默认安装了python,c/c++环境,并且apt软件源已经换成了华为镜像源,省去了很多麻烦,这点好评
(base) HwHiAiUser@orangepiaipro:~$ gcc --version
gcc (Ubuntu 11.4.0-1ubuntu1~22.04) 11.4.0
(base) HwHiAiUser@orangepiaipro:~$ g++ --version
g++ (Ubuntu 11.4.0-1ubuntu1~22.04) 11.4.0
(base) HwHiAiUser@orangepiaipro:~$ make --version
GNU Make 4.3
(base) HwHiAiUser@orangepiaipro:~$ python --version
Python 3.9.2
(base) HwHiAiUser@orangepiaipro:~$ which python
/usr/local/miniconda3/bin/python
ROS环境安装:
因为我目前学习的是自主空中机器人相关的知识,因此感觉这种小型主机更适合应用在智能车,无人机上,所以就需要安装ROS环境,Ubuntu22.04版本目前只支持安装ROS2以上的版>本,ROS环境安装推荐参考我的博客网站进行一键安装:ROS资源汇总-MGodmonkey的世界
4.案例测试
4.1 ROS2-PyQt小海龟控制
这是当初我入门学习ROS结合PyQt搭建可视化界面写的一个小案例,感兴趣的可以前往:【ROS2-PyQt小案例】进行复刻
环境:
- ROS2:foxy
- python:3.8.10
- PyQt:5.10.12
1. 初试化工作空间
mkdir -p ~/dev_ws/src
cd ~/dev_ws/src
git clone https://github.com/MGod-monkey/ros2_pyqt_turtlesim_key.git
2. 编译与运行
cd ~/dev_ws
colcon build
source install/setup.sh
ros2 run ros2_pyqt_turtlesim_key ros2_pyqt_turtlesim_key
3.其他
您可以通过Qt designer打开 'ros2_pyqt_turtlesim_key/key.ui' 文件来编辑图形界面,并通过以下命令将 '.ui' 文件转换为python文件
pyuic5 -o key_ui.py key.ui
在香橙派Aipro上运行效果如下,还是很流畅的
4.1 图像特征匹配
因为之前实在没有跑过什么AI相关的案例,开发板也玩的少,只能先跑我本科毕设时候做的图像特征匹配案例来试试水了(小小提一嘴,我这毕设拿了校优二等hh),感兴趣的同样可以前往:【https://github.com/MGod-monkey/FeatureMatchToolbox.git】进行复刻
- 软件在香橙派Aipro上运行特征匹配算法的效果
- 各特征匹配算法在香橙派Aipro上运行的耗时和效果图如下,总体来说效果还是很不错的

3.运行SuperGule算法进行实时的匹配
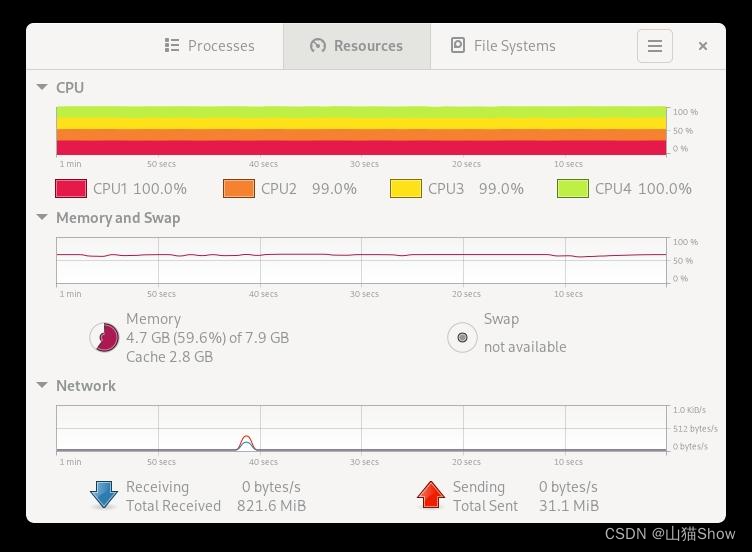
实际运行下来,在处理640x480图像时有13fps左右,这效果已经远远超出了我原本的预期了,俗话说1帧能玩,2帧流畅,3帧电竞,,,
最后
非常感谢香橙派官方对本次测评的大力资助,说实话当初官方找到我的时候我的非常震惊的,因为我本身并不是专业的测评博主,只是喜欢在论坛上分享学习经验和知识的小白白,因此再次感谢香橙派官方对我信任 ,前段时间看到树莓派5B发布,四路 Arm Cortex-A76 @ 2.4GHz,512KB二级缓存,2MB L3 高速缓存,双 4kp60 HDMI 显示输出,,,,心里是狠狠悸动了一下,但看到现在国产派也在慢慢上赶,心里也是非常喜悦的(虽然本次的香橙派和华为合作研发的香橙派Aipro跟树莓派5B不是一个赛道的)
希望本次香橙派Aipro入门博客分享能给正在入门香橙派的看客一个经验分享,希望香橙派的生态越来越好,香橙派