在实际的项目中,使用线程池是非常广泛的,所以最近学习了线程池的开发,在此做一个总结。
源码:https://github.com/Cheeron955/Handwriting-threadpool-based-on-C-17
项目介绍
项目分为两个部分,在初版的时候,使用了C++11中的知识,自己实现了Any类,Semaphore类以及Result类的开发,代码比较绕,但是有很多细节是值得学习的;最终版使用了C++17提供的future类,使得代码轻量化。接下来先看初版:
test.cpp
先从test.cpp开始剖析项目构造:
#include <iostream>
#include <chrono>
#include <thread>
#include "threadpool.h"
using ULong = unsigned long long;
class MyTask : public Task
{
public:
MyTask(int begin, int end)
:begin_(begin)
,end_(end)
{
}
Any run()
{
std::cout << "tid:" << std::this_thread::get_id() << "begin!" << std::endl;
std::this_thread::sleep_for(std::chrono::seconds(3));
ULong sum = 0;
for (ULong i = begin_; i < end_; i++)
{
sum += i;
}
std::cout << "tid:" << std::this_thread::get_id() << "end!" << std::endl;
return sum;
}
private:
int begin_;
int end_;
};
int main()
{
{
ThreadPool pool;
pool.setMode(PoolMode::MODE_CACHED);
pool.start(4);
Result res1 = pool.submitTask(std::make_shared<MyTask>(1, 1000000));
Result res2 = pool.submitTask(std::make_shared<MyTask>(1, 1000000));
pool.submitTask(std::make_shared<MyTask>(1, 1000000));
pool.submitTask(std::make_shared<MyTask>(1, 1000000));
pool.submitTask(std::make_shared<MyTask>(1, 1000000));
pool.submitTask(std::make_shared<MyTask>(1, 1000000));
ULong sum1 = res1.get().cast_<ULong>();
std::cout << sum1 << std::endl;
}
std::cout << "main over!" << std::endl;
getchar();
}
- 在main函数中,创建了一个ThreadPool对象,进入ThreadPool中:
ThreadPool
重要成员变量
std::unordered_map<int, std::unique_ptr<Thread>> threads_;
//初始的线程数量
int initThreadSize_;
//记录当前线程池里面线程的总数量
std::atomic_int curThreadSize_;
//线程数量上限阈值
int threadSizeThresHold_;
//记录空闲线程的数量
std::atomic_int idleThreadSize_;
//任务队列
std::queue<std::shared_ptr<Task>> taskQue_;
//任务数量 需要保证线程安全
std::atomic_int taskSize_;
//任务队列数量上限阈值
int taskQueMaxThresHold_;
//任务队列互斥锁,保证任务队列的线程安全
std::mutex taskQueMtx_;
//表示任务队列不满
std::condition_variable notFull_;
//表示任务队列不空
std::condition_variable notEmpty_;
//等待线程资源全部回收
std::condition_variable exitCond_;
//当前线程池的工作模式
PoolMode poolMode_;
//表示当前线程池的启动状态
std::atomic_bool isPoolRuning_;
const int TASK_MAX_THRESHHOLD = INT32_MAX;
const int THREAD_MAX_THRESHHOLD = 100;
const int THREAD_MAX_IDLE_TIME = 60; //60s
- 具体含义请看代码中注释
重要成员函数
- 构造函数
//线程池构造
ThreadPool::ThreadPool()
: initThreadSize_(4)
, taskSize_(0)
, idleThreadSize_(0)
, curThreadSize_(0)
, threadSizeThresHold_(THREAD_MAX_THRESHHOLD)
, taskQueMaxThresHold_(TASK_MAX_THRESHHOLD)
, poolMode_(PoolMode::MODE_FIXED)
, isPoolRuning_(false)
{
}
- 进行了一系列的初始化,包括线程数量,阙值等等
- 析构函数
ThreadPool::~ThreadPool()
{
isPoolRuning_ = false;
//notEmpty_.notify_all();//把等待的叫醒 进入阻塞 会死锁
std::unique_lock<std::mutex> lock(taskQueMtx_);
//等待线程池里面所有的线程返回用户调用ThreadPool退出 两种状态:阻塞 正在执行任务中
notEmpty_.notify_all();//把等待的叫醒 进入阻塞
exitCond_.wait(lock, [&]()->bool {return threads_.size() == 0; });
}
- 析构函数中,主要是回收线程池的资源,但是这里要注意
notEmpty_.notify_all();位置,如果在获得锁之前就唤醒,可能会发生死锁问题,这个在下面还会在提到。
- 设置线程池的工作模式
void ThreadPool::setMode(PoolMode mode)
{
if (checkRunningState()) return;
poolMode_ = mode;
}
- 设置task任务队列上限阈值
void ThreadPool::setTaskQueMaxThreshHold(int threshhold)
{
if (checkRunningState()) return;
taskQueMaxThresHold_ = threshhold;
}
- 设置线程池的工作模式,支持fixed以及cached模式
enum class PoolMode
{
MODE_FIXED, //固定数量的线程
MODE_CACHED, //线程数量可动态增长
};
void ThreadPool::setMode(PoolMode mode)
{
if (checkRunningState()) return;
poolMode_ = mode;
}
- 设置task任务队列上限阈值
void ThreadPool::setTaskQueMaxThreshHold(int threshhold)
{
if (checkRunningState()) return;
taskQueMaxThresHold_ = threshhold;
}
- 设置线程池cached模式下线程阈值
void ThreadPool::setThreadSizeThreshHold(int threshhold)
{
if (checkRunningState()) return;
if (poolMode_ == PoolMode::MODE_CACHED)
{
threadSizeThresHold_ = threshhold;
}
}
- 给线程池提交任务,这是重中之重,用来生产任务
Result ThreadPool::submitTask(std::shared_ptr<Task> sp)
{
//获取锁
std::unique_lock<std::mutex> lock(taskQueMtx_);
//线程通信 等待任务队列有空余 并且用户提交任务最长不能阻塞超过1s 否则判断提交失败,返回
if(!notFull_.wait_for(lock, std::chrono::seconds(1),
[&]()->bool {return taskQue_.size() < (size_t)taskQueMaxThresHold_; }))
{
std::cerr << "task queue is full,submit task fail." << std::endl;
return Result(sp, false);
}
//如果有空余,把任务放入任务队列中
taskQue_.emplace(sp);
taskSize_++;
notEmpty_.notify_all();
if (poolMode_ == PoolMode::MODE_CACHED
&& taskSize_>idleThreadSize_
&& curThreadSize_ < threadSizeThresHold_)
{
std::cout << ">>> create new thread" << std::endl;
//创建thread线程对象
auto ptr = std::make_unique<Thread>(std::bind(&ThreadPool::threadFunc, this, std::placeholders::_1));
//threads_.emplace_back(std::move(ptr)); //资源转移
int threadId = ptr->getId();
threads_.emplace(threadId, std::move(ptr));
threads_[threadId]->start(); //启动线程
//修改线程个数相关的变量
curThreadSize_++;
idleThreadSize_++;
}
//返回任务的Result对象
return Result(sp);
}
- 在submitTask函数中,首先这是生产任务的函数,所以我们要保证线程安全,获取锁;
- 考虑到了如果有耗时严重的任务一直占用,线程,导致提交任务一直失败,所以等待1s提交失败以后会通知用户;
- 此时队列里面的任务没有超过阙值,就把任务放入任务队列中,更新任务数;
- 因为新放了任务,任务队列不空了,在notEmpty_上进行通知,赶快分配线程执行任务;
- cached模式下,需要根据任务数量和空闲线程的数量,判断是否需要创建新的线程出来,如果任务数大于现有的空闲线程数并且没有超过阙值,就增加线程,修改相关数量;
- 返回任务的Result对象
- 开启线程池
void ThreadPool::start(int initThreadSize)
{
//设置线程池的运行状态
isPoolRuning_ = true;
//记录初始线程个数
initThreadSize_ = initThreadSize;
curThreadSize_ = initThreadSize;
//创建线程对象
for (int i = 0; i < initThreadSize_; i++)
{
auto ptr = std::make_unique<Thread>(std::bind(&ThreadPool::threadFunc, this,std::placeholders::_1));
int threadId = ptr->getId();
threads_.emplace(threadId, std::move(ptr));
}
//启动所有线程 std::vector<Thread*> threads_;
for (int i = 0; i < initThreadSize_; i++)
{
threads_[i]->start(); //需要执行一个线程函数
//记录初始空闲线程的数量
idleThreadSize_++;
}
}
- 设置线程池的运行状态,如果线程在运行状态了,之前所有的设置相关的函数都不能运行了,记录初始相关数量
- 创建线程对象,把线程函数threadFunc给到thread线程对象,使用绑定器,获取线程id,方便回收线程资源;
- 加入线程列表
std::unordered_map<int, std::unique_ptr<Thread>>类型; - 启动所有线程,执行线程函数,threadFunc
void Thread::start()
{
std::thread t(func_,threadId_);
t.detach();
}
- 线程函数,从任务队列里面消费任务
void ThreadPool::threadFunc(int threadid) //线程函数返回,相应的线程就结束了
{
auto lastTime = std::chrono::high_resolution_clock().now();
for(;;)
{
std::shared_ptr<Task> task;
{
//获取锁
std::unique_lock<std::mutex> lock(taskQueMtx_);
std::cout << "tid:" << std::this_thread::get_id()
<< "尝试获取任务..." << std::endl;
while ( taskQue_.size() == 0 )
{
if (!isPoolRuning_)
{
threads_.erase(threadid);
std::cout << "threadid:" << std::this_thread::get_id()
<< "exit!" << std::endl;
//通知主线程线程被回收了,再次查看是否满足条件
exitCond_.notify_all();
return;
}
if (poolMode_ == PoolMode::MODE_CACHED)
{ //超时返回std::cv_status::timeout
if (std::cv_status::timeout ==
notEmpty_.wait_for(lock, std::chrono::seconds(1)))
{
auto now = std::chrono::high_resolution_clock().now();
auto dur = std::chrono::duration_cast<std::chrono::seconds>(now - lastTime);
if (dur.count() >= THREAD_MAX_IDLE_TIME
&& curThreadSize_ > initThreadSize_)
{
threads_.erase(threadid);
curThreadSize_--;
idleThreadSize_--;
std::cout << "threadid:" << std::this_thread::get_id()
<< "exit!" << std::endl;
return;
}
}
}
else
{
//等待notEmpty_条件
notEmpty_.wait(lock);
}
/*if (!isPoolRuning_)
{
threads_.erase(threadid);
std::cout << "threadid:" << std::this_thread::get_id()
<< "exit!" << std::endl;
exitCond_.notify_all();
return;
}*/
}
idleThreadSize_--;
std::cout << "tid:" << std::this_thread::get_id()
<< "获取任务成功..." << std::endl;
//从任务队列中取一个任务出来
task = taskQue_.front();
taskQue_.pop();
taskSize_--;
//若依然有剩余任务,继续通知其他线程执行任务
if (taskQue_.size() > 0)
{
notEmpty_.notify_all();
}
notFull_.notify_all();
}//释放锁,使其他线程获取任务或者提交任务
if (task != nullptr)
{
task->exec();
}
idleThreadSize_++;
auto lastTime = std::chrono::high_resolution_clock().now();
}
}
- 获取任务开始的时间,便于在cached模式下,判断是否需要回收线程
- 创造一个Task类,获取锁
class Task
{
public:
Task();
~Task()=default;
void exec();
void setResult(Result*res);
//用户可以自定义任意任务类型,从Task继承,重写run方法,实现自定义任务处理
virtual Any run() = 0;
private:
Result* result_; //Result的生命周期》Task的
};
- 如果此时任务队列里没有任务,并且主函数退出了,此时会在ThreadPool析构中设置isPoolRuning_为false,这时候就该回收线程资源了,并通知析构函数是否满足条件;
- 如果isPoolRuning_为ture,但是在cached模式下,根据当前时间和上一次线程使用时间,判断有没有超过60s,如果超过了,并且当前线程数大于初始定义,说明不需要那么多线程了就需要回收线程资源;
- 如果不在cached模式,就阻塞等待任务队列里面有任务
- 获取成功任务,取出,如果队列里面还有任务,继续通知。并且取完任务,消费了一个任务 进行通知可以继续提交生产任务了,释放锁,使其他线程获取任务或者提交任务;
- 执行任务,把任务的返回值通过setVal方法给到Result;
- 线程处理完了,更新线程执行完任务调度的时间
- 检查线程池状态
bool ThreadPool::checkRunningState() const
{
return isPoolRuning_;
}
- 执行任务
void Task::exec()
{
if (result_ != nullptr)
{
result_->setVal(run()); //多态调用,run是用户的任务
}
}
void Task::setResult(Result* res)
{
result_ = res;
}
- 把任务的返回值通过setVal方法给到Result
- 信号量类
class Semaphore
{
public:
Semaphore(int limit = 0)
:resLimit_(limit)
{}
~Semaphore() = default;
void wait()
{
std::unique_lock<std::mutex> lock(mtx_);
//等待信号量有资源 没有资源的话 会阻塞当前线程
cond_.wait(lock, [&]()->bool { return resLimit_ > 0; });
resLimit_--;
}
void post()
{
std::unique_lock<std::mutex> lock(mtx_);
resLimit_++;
cond_.notify_all();
}
private:
int resLimit_;
std::mutex mtx_;
std::condition_variable cond_;
};
- 在信号量类中使用了条件变量和互斥锁实现了信号量的实现,等待信号量资源和释放信号量资源。
- Any类
class Any
{
public:
Any() = default;
~Any() = default;
//左值
Any(const Any&) = delete;
Any& operator=(const Any&) = delete;
//右值
Any(Any&&) = default;
Any& operator=(Any&&) = default;
template<typename T>
Any(T data) :base_(std::make_unique<Derive<T>>(data))
{}
template<typename T>
T cast_()
{
Derive<T> *pd = dynamic_cast<Derive<T>*>(base_.get());
if (pd == nullptr)
{
throw "type is unmatch";
}
return pd->data_;
}
private:
//基类类型
class Base
{
public:
virtual ~Base() = default;
};
//派生类类型
template<typename T>//模板
class Derive :public Base
{
public:
Derive(T data) : data_(data)
{}
T data_; //保存了任意的其他类型
};
private:
//定义一个基类指针,基类指针可以指向派生类对象
std::unique_ptr<Base> base_;
};
- 定义了一个基类Base
- 定义了一个模板类的派生类类型,继承Base,其中保存了任意的其他类型;
- 对象包在派生类对象里面,通过基类指针指向派生类对象,构造函数可以让Any类型接收任意其他的数据类型,用户就可以使用任意期望的类型;
cast_()方法把Any对象里面存储的data数据提取出来,基类指针指向 派生类指针 ,使用强转dynamic_cast将基类指针或引用转换为派生类指针或引用,获取了指向的Derive对象,然后提取出来data_;
- Result方法的实现
class Result
{
public:
Result(std::shared_ptr<Task> task, bool isValid = true);
~Result() = default;
//setVal方法,获取任务执行完的返回值
void setVal(Any any);
//用户调用get方法,获取task的返回值
Any get();
private:
//存储任务的返回值
Any any_;
//线程通信信号量
Semaphore sem_;
//指向对应获取返回值的任务对象
std::shared_ptr<Task> task_;
//返回值是否有效
std::atomic_bool isValid_;
};
Result::Result(std::shared_ptr<Task> task, bool isValid)
:isValid_(isValid)
,task_(task)
{
task_->setResult(this);
}
Any Result::get()
{
if (!isValid_)
{
return " ";
}
//task任务如果没有执行完,这里会阻塞用户的线程
sem_.wait();
return std::move(any_);
}
void Result::setVal(Any any)
{
//存储task的返回值
this->any_ = std::move(any);
//已经获取了任务的返回值,增加信号量资源
sem_.post();
}
- Result 实现接受提交到线程池的task任务执行完成后的返回值类型result;
- 设置了setVal方法,获取任务执行完的返回值和用户调用get方法,获取task的返回值,使用了信号量等到setVal设置成功,才能获取值,否则会进入阻塞;
回到test.cpp
- 定义了一个ThreadPool对象,默认是固定的,可以修改为cached模式,然后开启线程(可以使用hardware_concurrency()获取cpu核心数量);
- 提交任务submitTask;
- 出 } 进行析构
举个栗子~
在cached模式,代码如上test.cpp
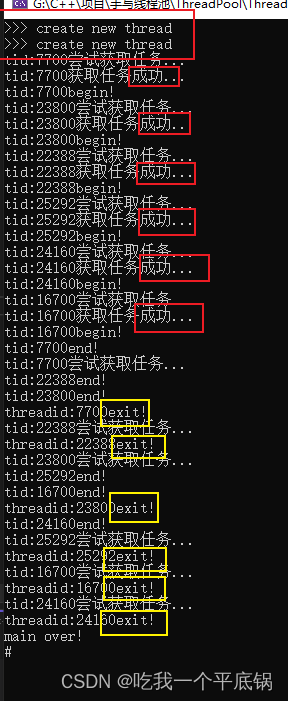
可以看到,目前四个线程,六个任务,所以创建了两个线程;
六个线程获取任务成功,然后释放资源成功;
固定线程:
int main()
{
{
ThreadPool pool;
pool.start(4);
Result res1 = pool.submitTask(std::make_shared<MyTask>(1, 1000000));
Result res2 = pool.submitTask(std::make_shared<MyTask>(1, 1000000));
pool.submitTask(std::make_shared<MyTask>(1, 1000000));
pool.submitTask(std::make_shared<MyTask>(1, 1000000));
pool.submitTask(std::make_shared<MyTask>(1, 1000000));
ULong sum1 = res1.get().cast_<ULong>();
std::cout << sum1 << std::endl;
}
std::cout << "main over!" << std::endl;
getchar();
}
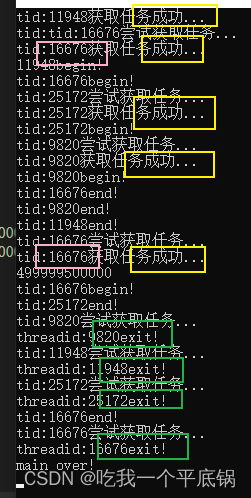
有四个线程,五个任务,11676线程获取了两次任务,最后回收线程资源。

![[数据集][目标检测]红外车辆检测数据集VOC+YOLO格式13979张类别](https://img-blog.csdnimg.cn/direct/17457a91173845208f30064ac8d094c2.png)

![[FlareOn6]Overlong](https://img-blog.csdnimg.cn/direct/bd9d890dba1e4e76a08a61e25ad399d6.png)