这个是全网最详细的STM32项目教学视频。
第一篇在这里:
视频在这里
STM32智能小车V3-STM32入门教程-openmv与STM32循迹小车-stm32f103c8t6-电赛 嵌入式学习 PID控制算法 编码器电机 跟随
15.1-超声波测距
完成超声波测距功能、测量数据显示在OLED屏幕上
硬件介绍
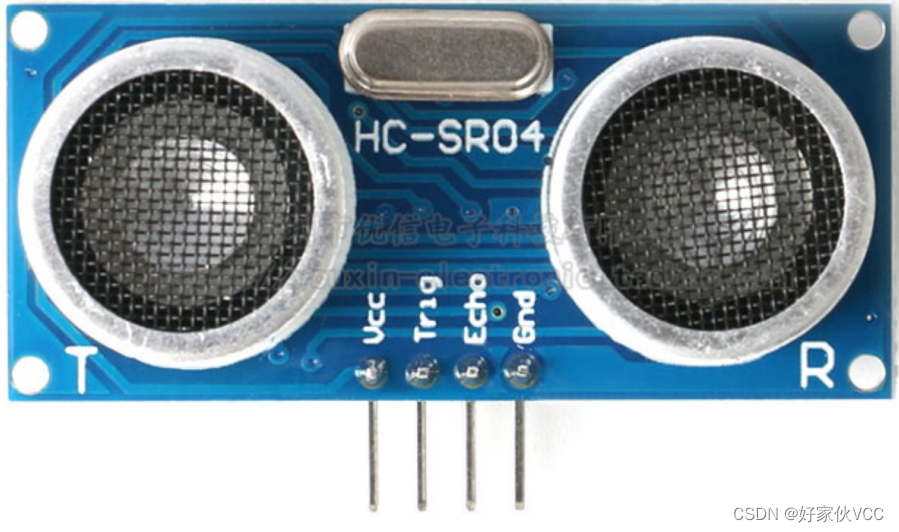
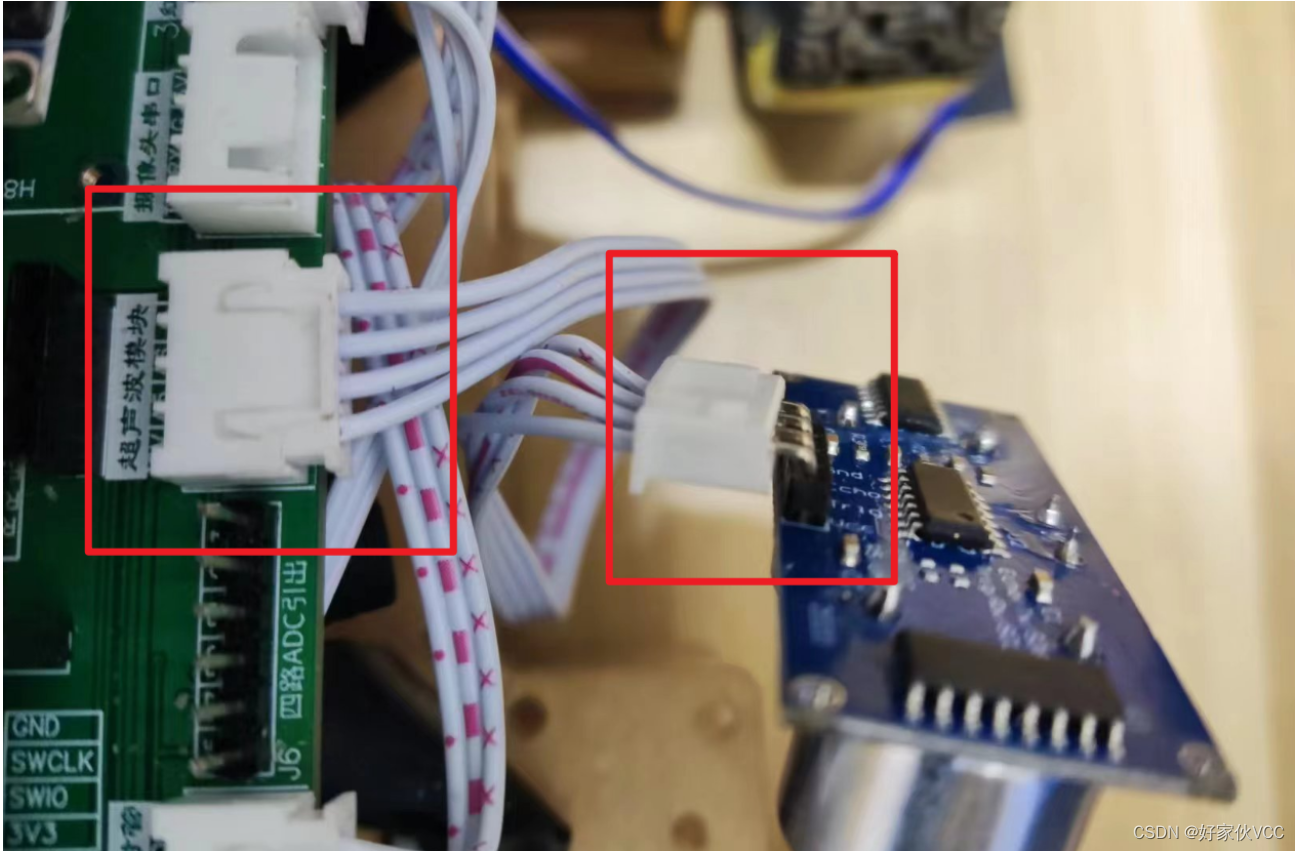
使用:HC-SR04 超声波测距模块
注意: 绘制PCB注意四个引脚顺序 Vcc Trig Echo Gnd
供电3.3V-5V(最好5V)
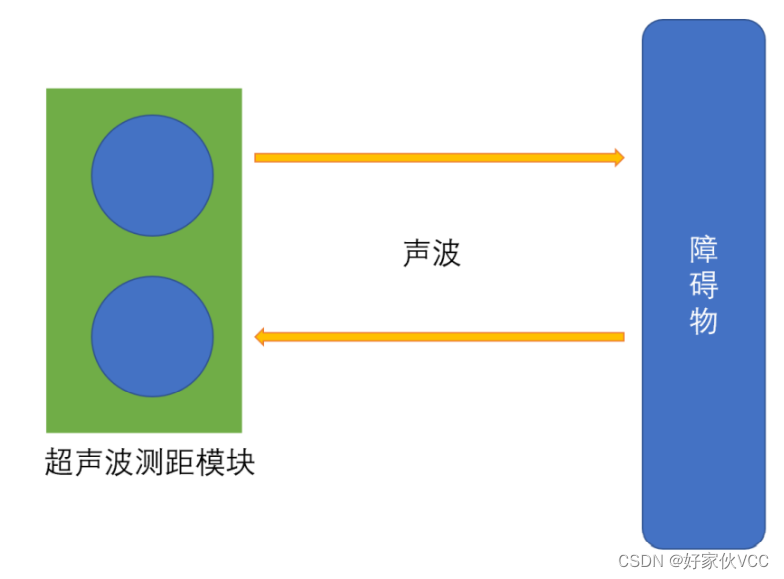
测距原理
不同模式
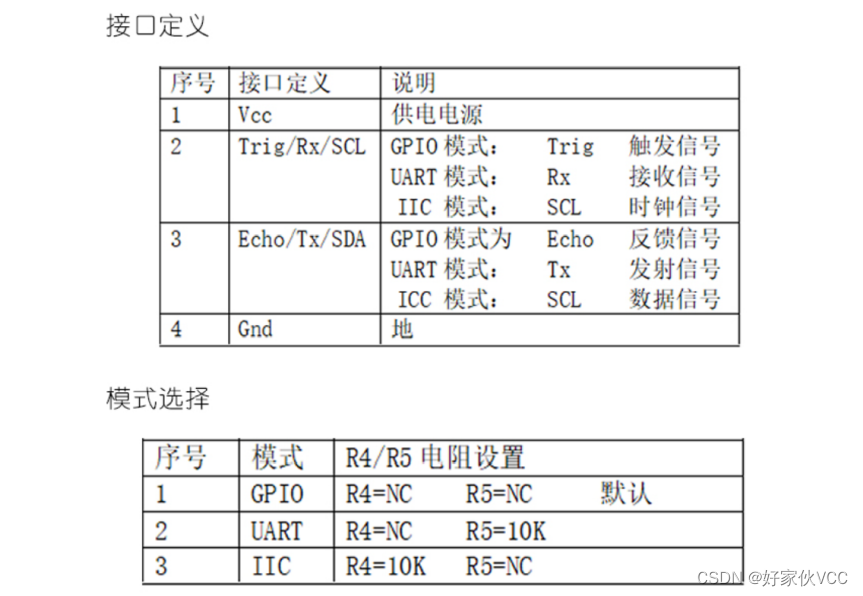
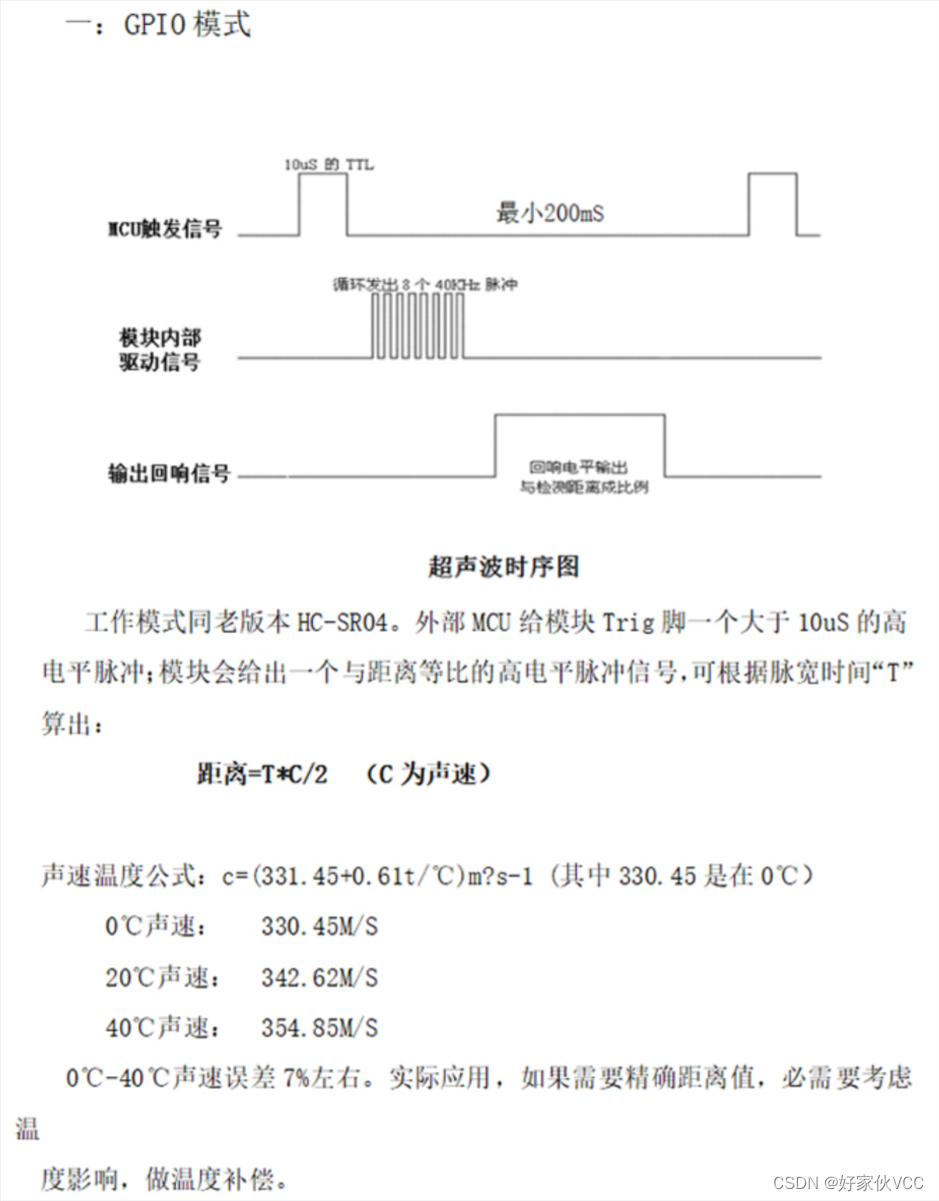
GPIO模式
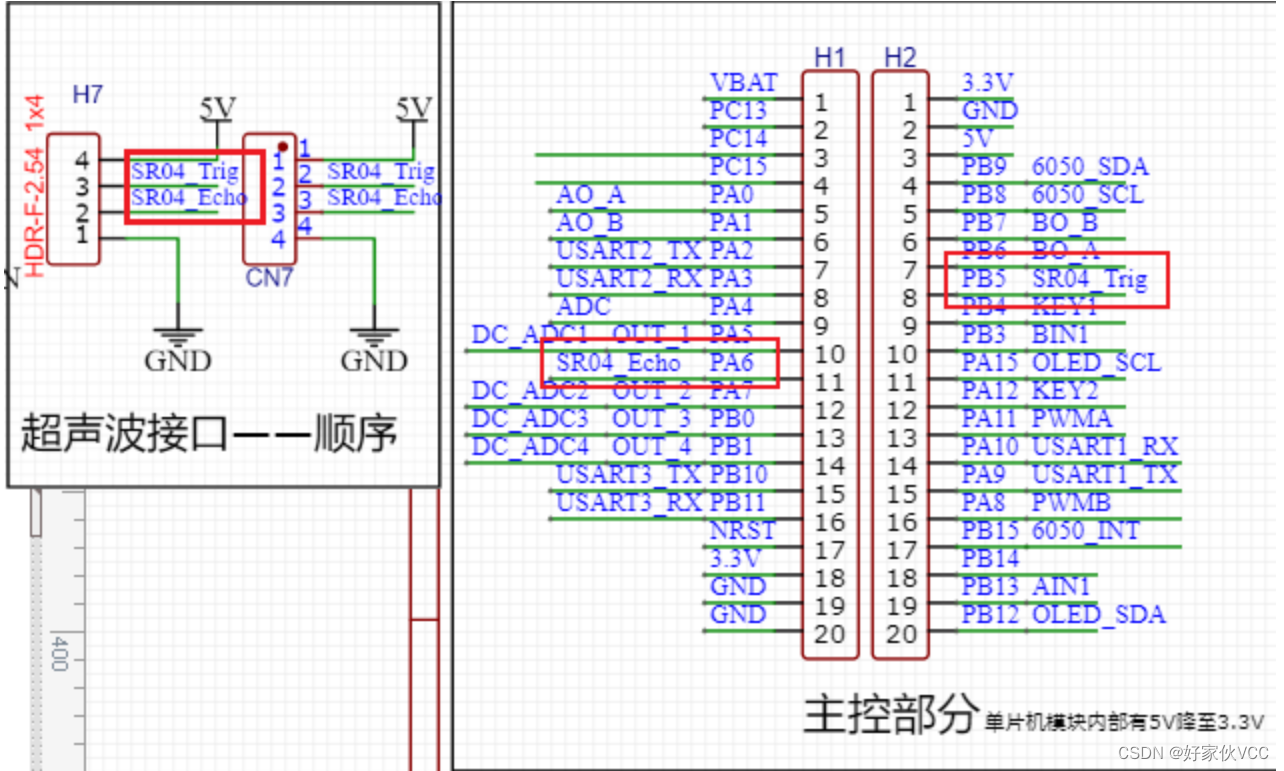
查看原理图
通过超声波的硬件介绍我们知道
MCU给Trig脚一个大于10us的高电平脉冲;然后读取Echo脚的高电平信号时间,通过公式:距离 = T* 声速/2 就可以算出来距离。
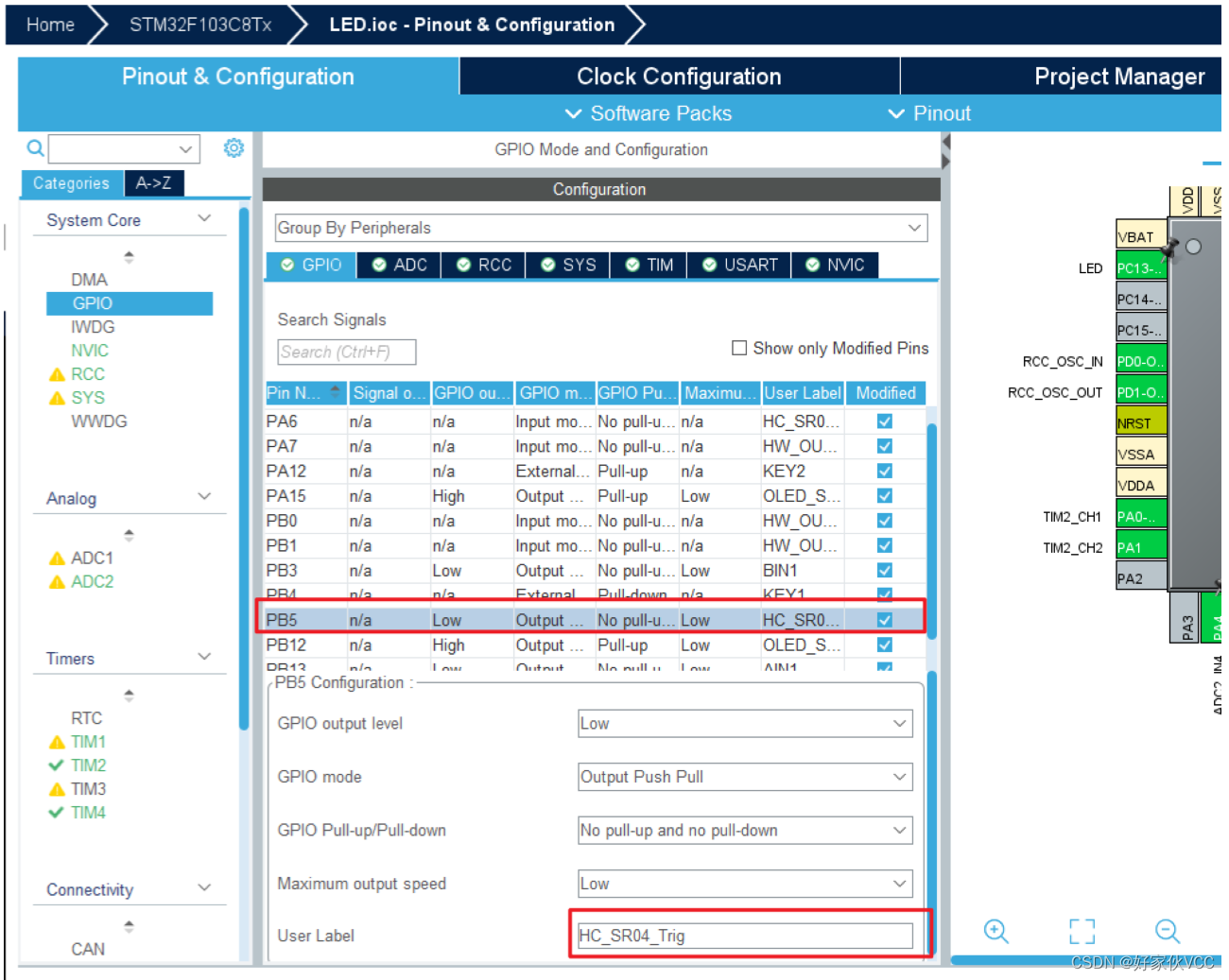
Trig(PB5)我们配置为GPIO输出
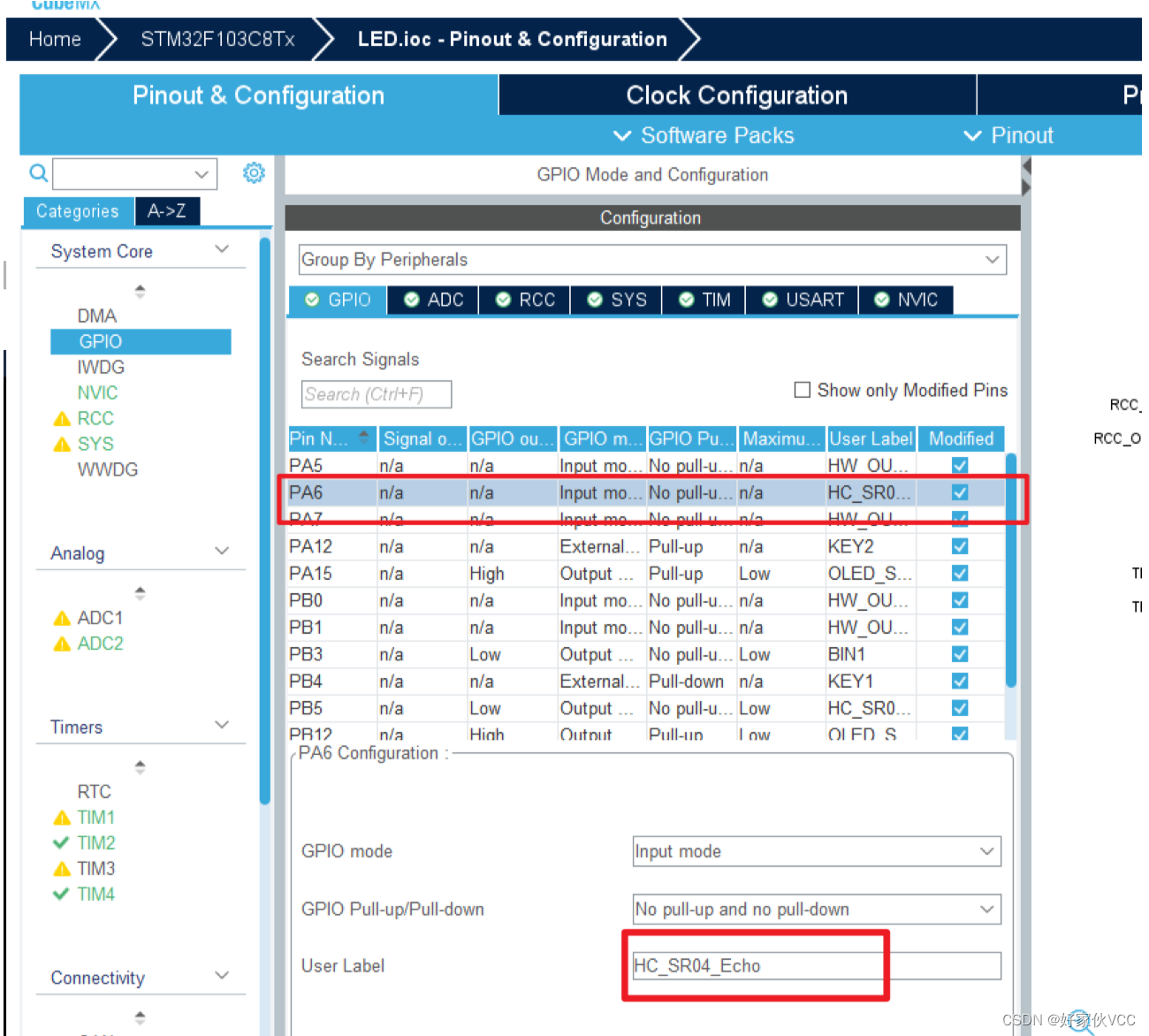
Echo(PA6)我们配置GPIO输入功能
注:这里大家可能会问,为什么不使用定时器捕获功能?
原因:
- 留一个定时器 方便以后扩展FreeRTOS使用
- 或者扩展其他舵机、电机等
软件初始化
设置PB5输出模式然后起别名
设置PA6输入模式、
然后生成代码
自己新建HC_SR04.c和HC_SR04.h 然后加入工程,指定路径
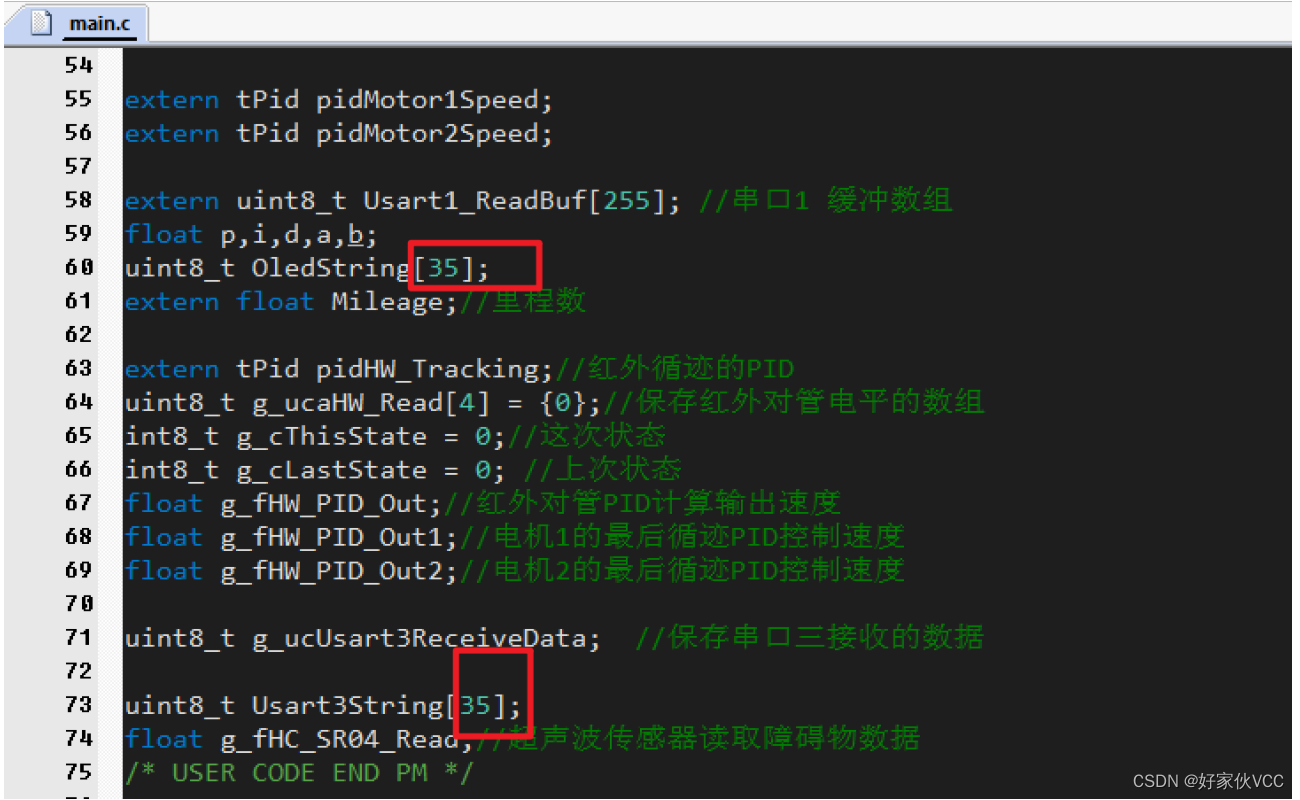
防止溢出 把之前使用的数组调整大一些
因为我们不适用定时器所以我们需要自己写一个us级延时函数
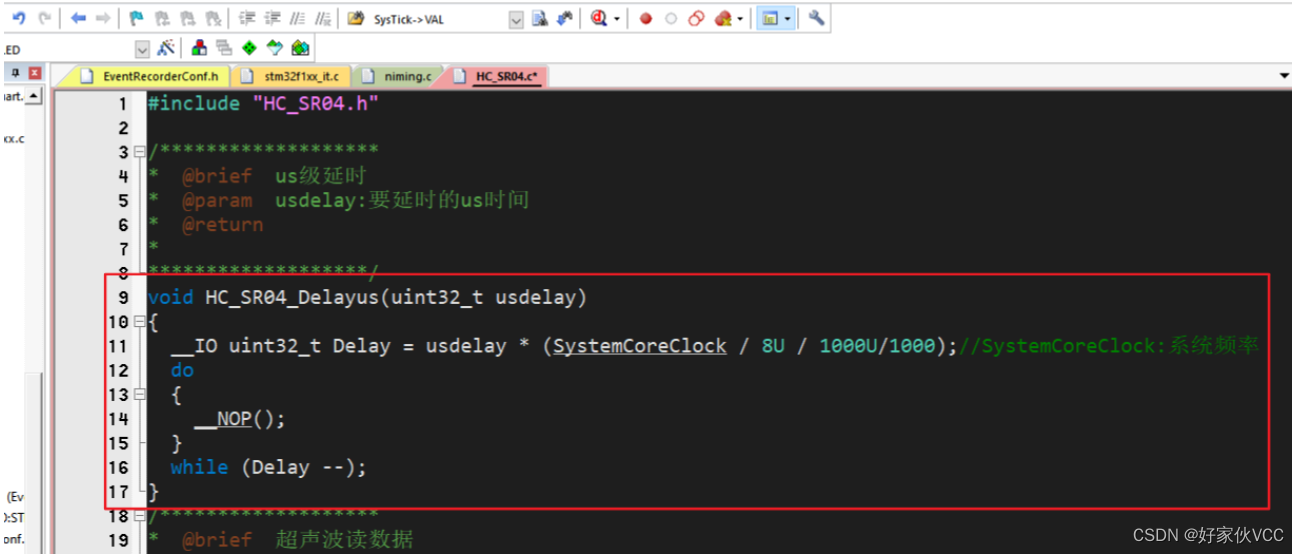
/*******************
* @brief us级延时
* @param usdelay:要延时的us时间
* @return
*
*******************/
void HC_SR04_Delayus(uint32_t usdelay)
{
__IO uint32_t Delay = usdelay * (SystemCoreClock / 8U / 1000U/1000);//SystemCoreClock:系统频率
do
{
__NOP();
}
while (Delay --);
}
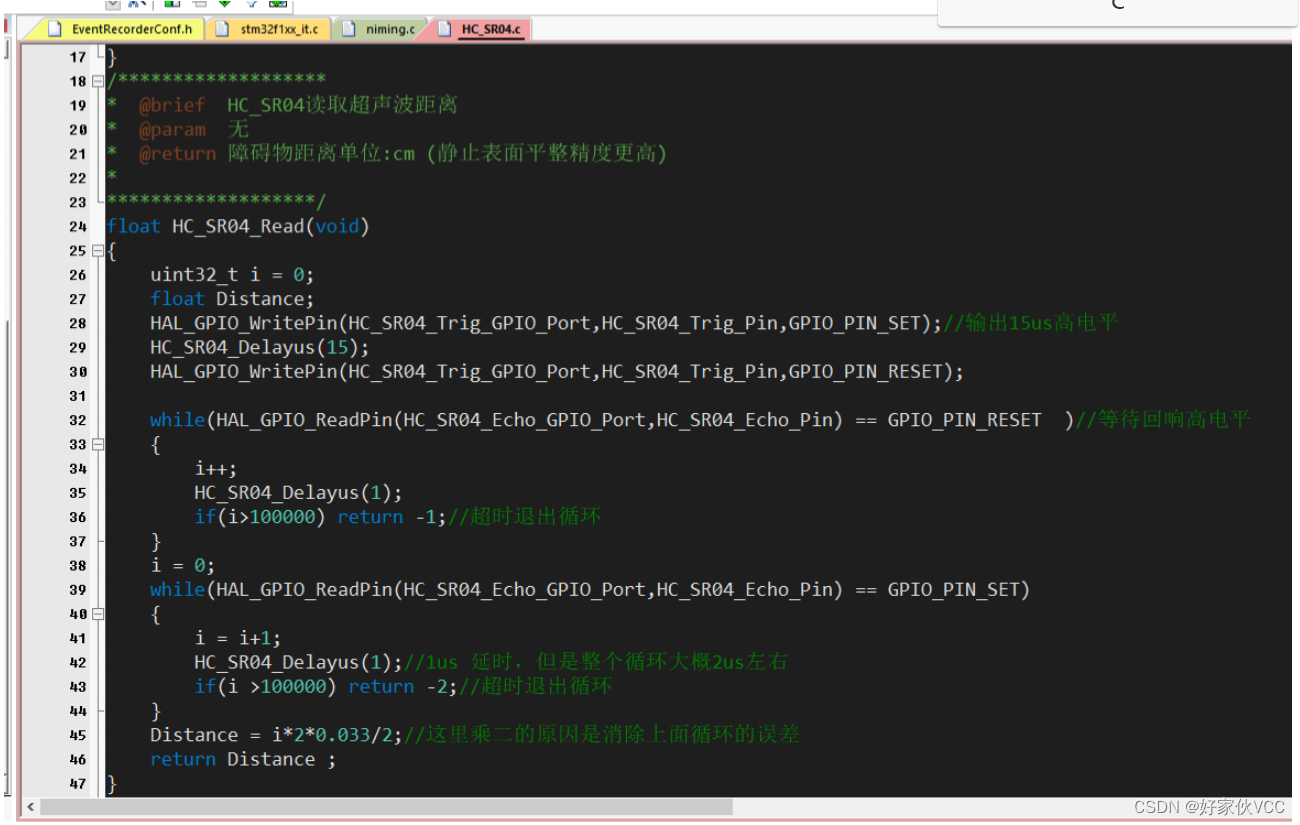
/*******************
* @brief HC_SR04读取超声波距离
* @param 无
* @return 障碍物距离单位:cm (静止表面平整精度更高)
*注意:两个HC_SR04_Read()函数调用的时间间隔要2ms及以上,测量范围更大 精度更高
*******************/
float HC_SR04_Read(void)
{
uint32_t i = 0;
float Distance;
HAL_GPIO_WritePin(HC_SR04_Trig_GPIO_Port,HC_SR04_Trig_Pin,GPIO_PIN_SET);//输出15us高电平
HC_SR04_Delayus(15);
HAL_GPIO_WritePin(HC_SR04_Trig_GPIO_Port,HC_SR04_Trig_Pin,GPIO_PIN_RESET);//高电平输出结束,设置为低电平
while(HAL_GPIO_ReadPin(HC_SR04_Echo_GPIO_Port,HC_SR04_Echo_Pin) == GPIO_PIN_RESET)//等待回响高电平
{
i++;
HC_SR04_Delayus(1);
if(i>100000) return -1;//超时退出循环、防止程序卡死这里
}
i = 0;
while(HAL_GPIO_ReadPin(HC_SR04_Echo_GPIO_Port,HC_SR04_Echo_Pin) == GPIO_PIN_SET)//下面的循环是2us
{
i = i+1;
HC_SR04_Delayus(1);//1us 延时,但是整个循环大概2us左右
if(i >100000) return -2;//超时退出循环
}
Distance = i*2*0.033/2;//这里乘2的原因是上面是2微妙
return Distance ;
}
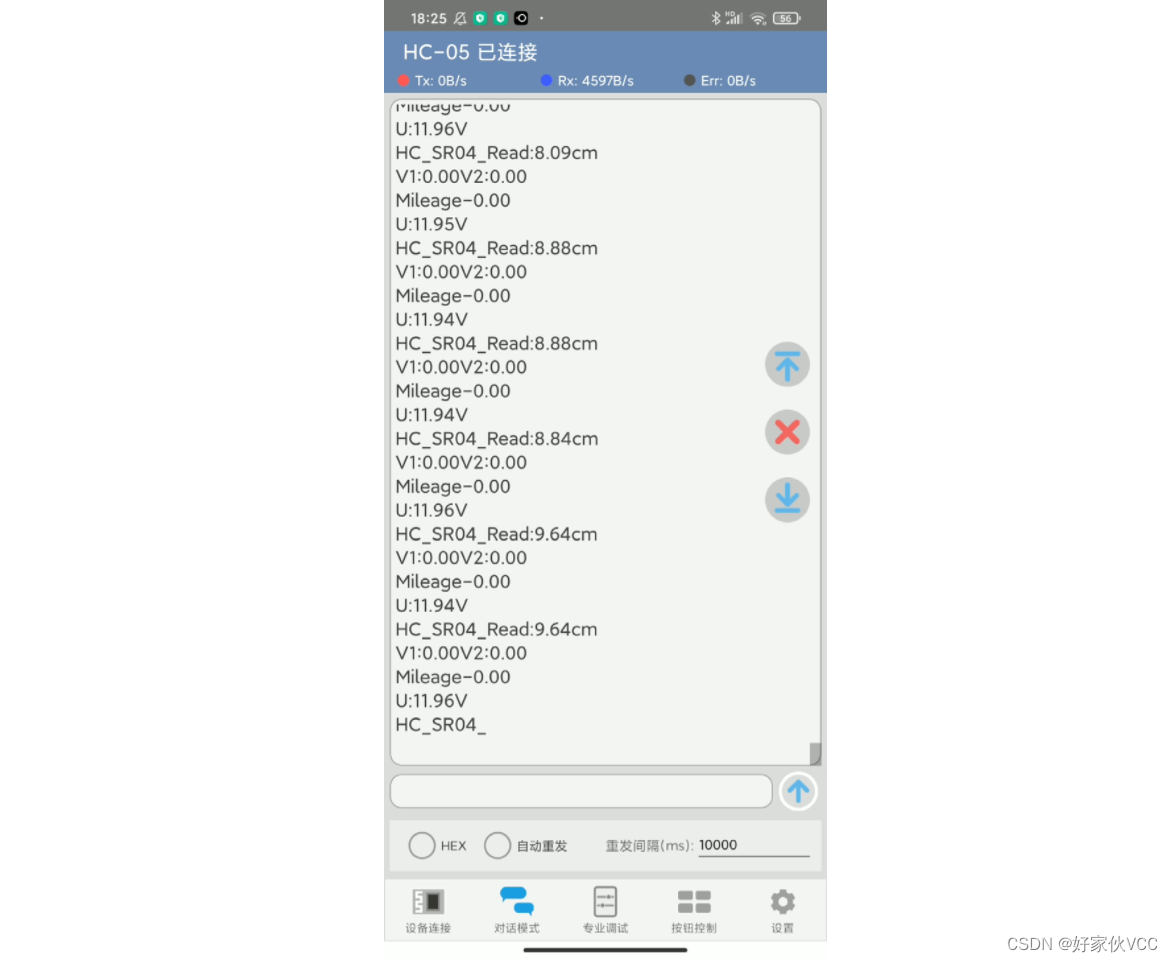
然后就可以读距离了、连上蓝牙可以显示数据
注意:两个HC_SR04_Read()函数调用的时间间隔要2ms及以上,测量范围更大 精度更高
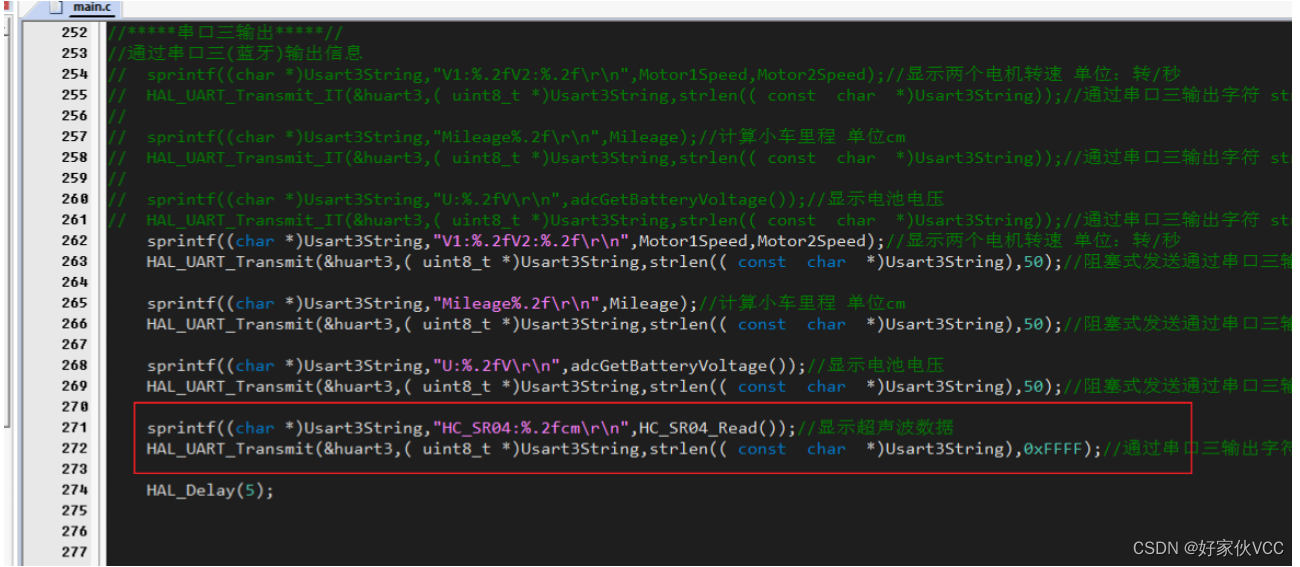
sprintf((char *)Usart3String,"HC_SR04:%.2fcm\r\n",HC_SR04_Read());//显示超声波数据
HAL_UART_Transmit(&huart3,( uint8_t *)Usart3String,strlen(( const char *)Usart3String),0xFFFF);//通过串口三输出字符 strlen:计算字符串大小
然后把我们的手机蓝牙和小车蓝牙连接
手机显示
15.2-避障逻辑编写
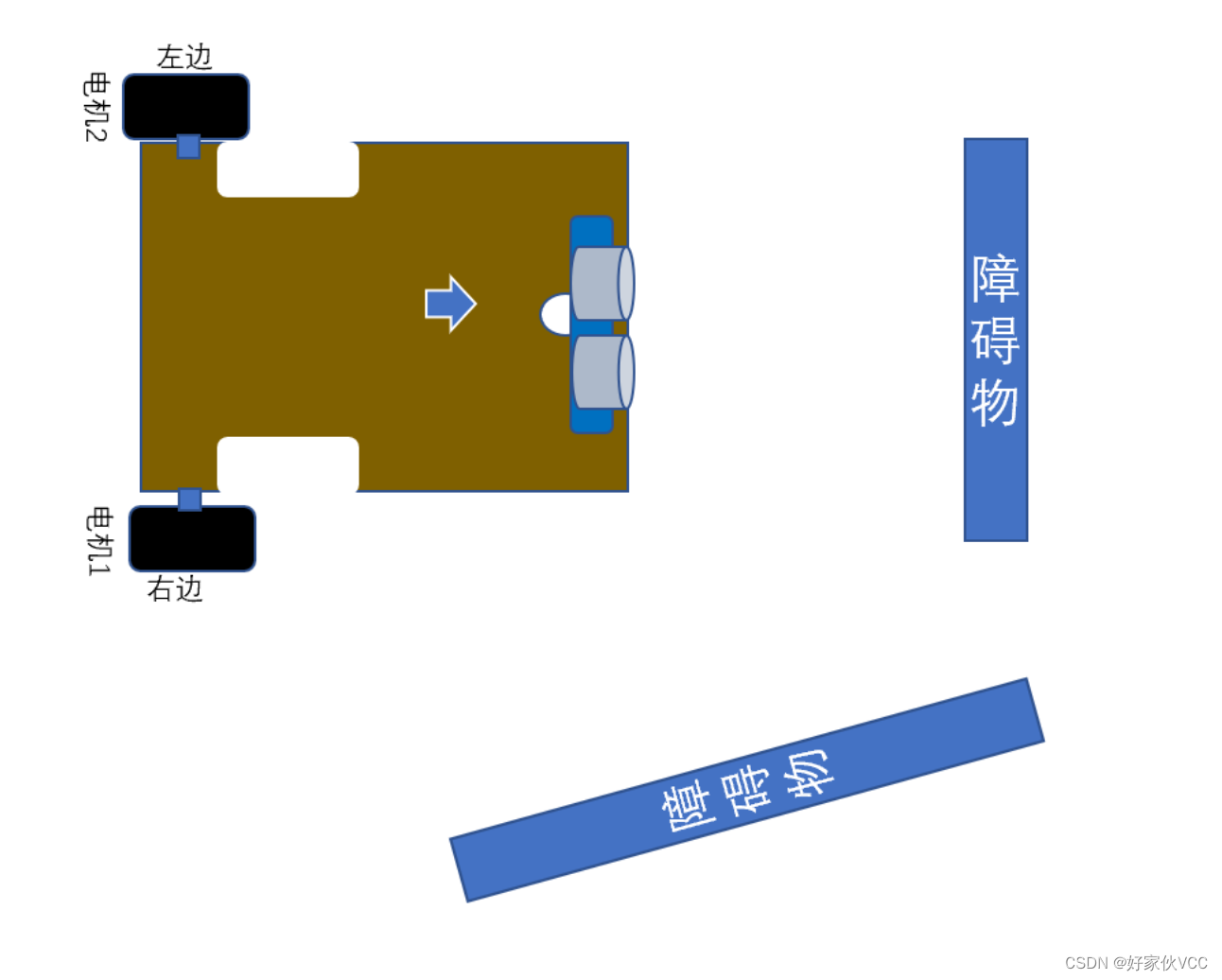
然后我们编写循迹逻辑,我们的逻辑时
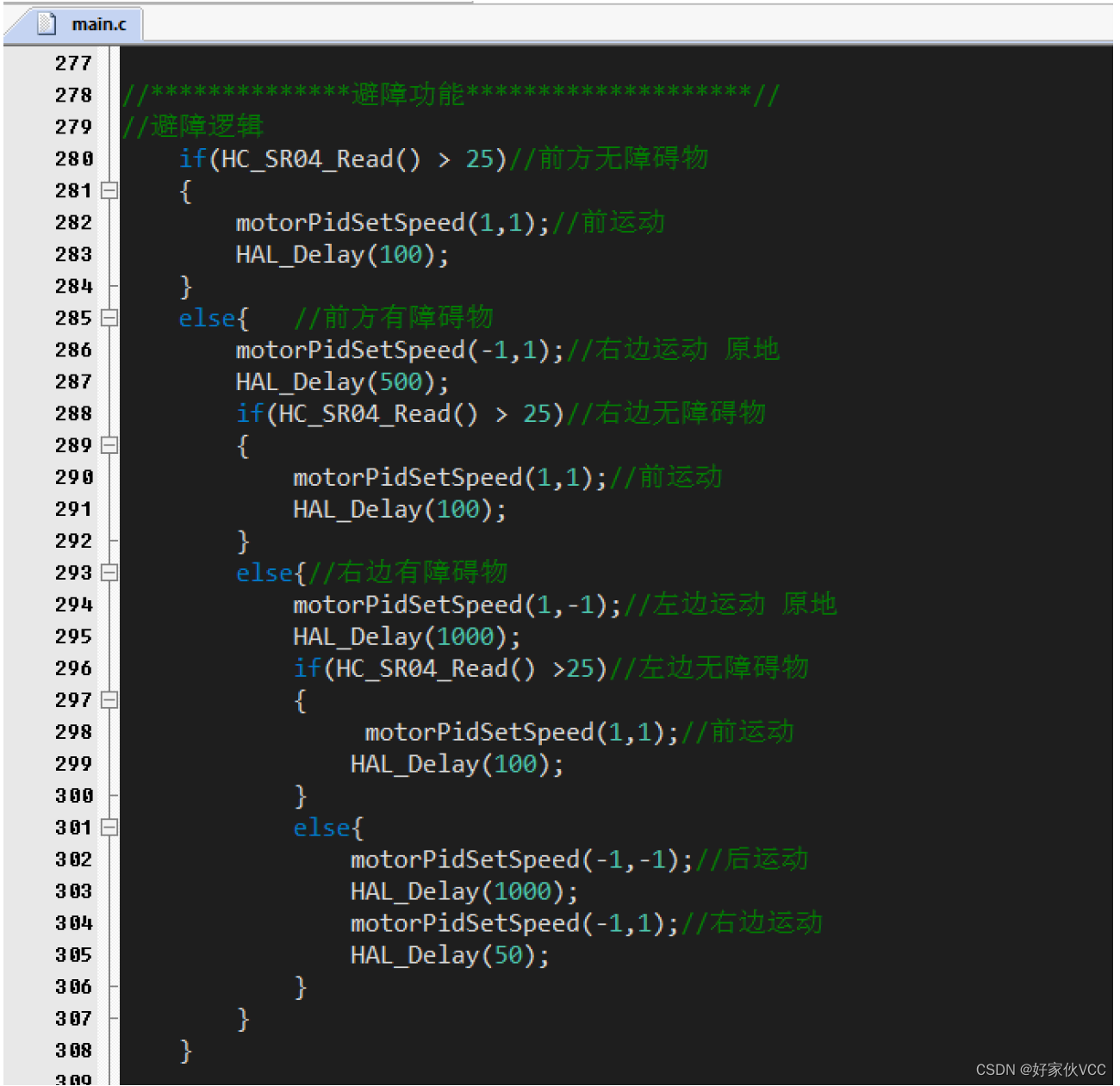
//**************避障功能********************//
//避障逻辑
if(HC_SR04_Read() > 25)//前方无障碍物
{
motorPidSetSpeed(1,1);//前运动
HAL_Delay(100);
}
else{ //前方有障碍物
motorPidSetSpeed(-1,1);//右边运动 原地
HAL_Delay(500);
if(HC_SR04_Read() > 25)//右边无障碍物
{
motorPidSetSpeed(1,1);//前运动
HAL_Delay(100);
}
else{//右边有障碍物
motorPidSetSpeed(1,-1);//左边运动 原地
HAL_Delay(1000);
if(HC_SR04_Read() >25)//左边无障碍物
{
motorPidSetSpeed(1,1);//前运动
HAL_Delay(100);
}
else{
motorPidSetSpeed(-1,-1);//后运动
HAL_Delay(1000);
motorPidSetSpeed(-1,1);//右边运动
HAL_Delay(50);
}
}
}
这样我们就可以使用超声波读取距离值了。
下篇16章我们i讲解如何利用超声波做跟随,我们后面会定距离跟随的功能。




![[Linux]磁盘管理](https://img-blog.csdnimg.cn/direct/ad983f9944f041d0bd98ecbcb8ef146f.png)