一、背景
观测器在现代控制理论中的地位十分重要,它是实现系统状态估计的关键工具。观测器的发展历程可以从以下几个方面概述:
1. 起源与发展背景:
观测器的概念源于对系统状态信息的需求,特别是在只能获取部分或间接输出信息的情况下,需要对系统内部不可直接测量的状态变量进行估计。随着现代控制理论的发展,尤其是线性系统理论中状态空间描述方法的确立,观测器理论得以孕育和发展。
2. 线性观测器:
- Luenberger观测器:最初由A.E. Luenberger于1964年提出,它是一种基于系统状态空间模型设计的线性滤波器,能够根据系统输出和输入信息在线估计系统的状态向量。Luenberger观测器是现代观测器设计的基础,它的核心思想是构造一个状态反馈矩阵,使得观测误差的动力学系统渐近稳定。

此图片来源于网络
- Kalman滤波器:在卡尔曼于1960年提出的最优状态估计理论的基础上,线性二次高斯(LQG)控制理论中包含的Kalman滤波器是观测器理论的重要组成部分,它在噪声和不确定性存在的环境中提供了最优线性估计方案。
3. 非线性观测器:
- EKF(扩展卡尔曼滤波器):是对非线性系统的观测器设计,通过一阶泰勒展开将非线性系统近似为线性系统,然后应用线性卡尔曼滤波算法进行状态估计。
- UKF(无迹卡尔曼滤波器):进一步发展,UKF通过采样点和sigma点的方式处理非线性问题,避免了线性化所带来的误差累积。
- 滑模观测器:在处理某些非线性或不确定系统时,滑模观测器利用切换函数构造滑模面,实现对系统状态的快速和精确估计。
4. 鲁棒观测器:
- 当系统存在不确定性(如参数摄动或外部扰动)时,观测器设计需要考虑鲁棒性。鲁棒观测器的设计目的在于即使在系统模型不准确或环境发生变化时,仍能保证一定的观测性能。
5.自适应观测器:
- 自适应观测器能够在线调整自身参数以适应系统参数的变化,这在参数未知或时变的系统中尤为重要。
6. 现代应用与拓展:
- 观测器技术已在众多领域得到了广泛应用,包括但不限于航空航天、机器人技术、电力系统、通信系统、工业自动化等。随着智能控制和分布式控制的发展,现代观测器还融入了学习算法、模糊逻辑、神经网络等先进技术,以应对越来越复杂的控制问题。
总的来说,现代控制理论中的观测器技术从最初的线性系统扩展到非线性系统,再到具有鲁棒性和自适应能力的高级观测器,始终致力于解决系统状态信息不足的问题,通过最优估计和实时更新,提升系统的整体性能和稳定性。随着理论研究的深入和实际需求的推动,观测器理论仍在不断创新和发展中。
此图片来源于网络
二、观测器设计
在控制理论中,观测器设计是一个构造系统模型以实时估计未知系统状态的过程。以下是一个典型的观测器设计过程:
系统建模:
开始设计观测器前,首先需要对被观测的系统建立数学模型,通常是一个线性或非线性系统模型。线性系统通常采用状态空间模型表示。
选择观测器结构:
常见的观测器结构有Luenberger观测器、Kalman滤波器、滑模观测器、H∞观测器等。根据系统特性和需求选择合适的观测器结构。
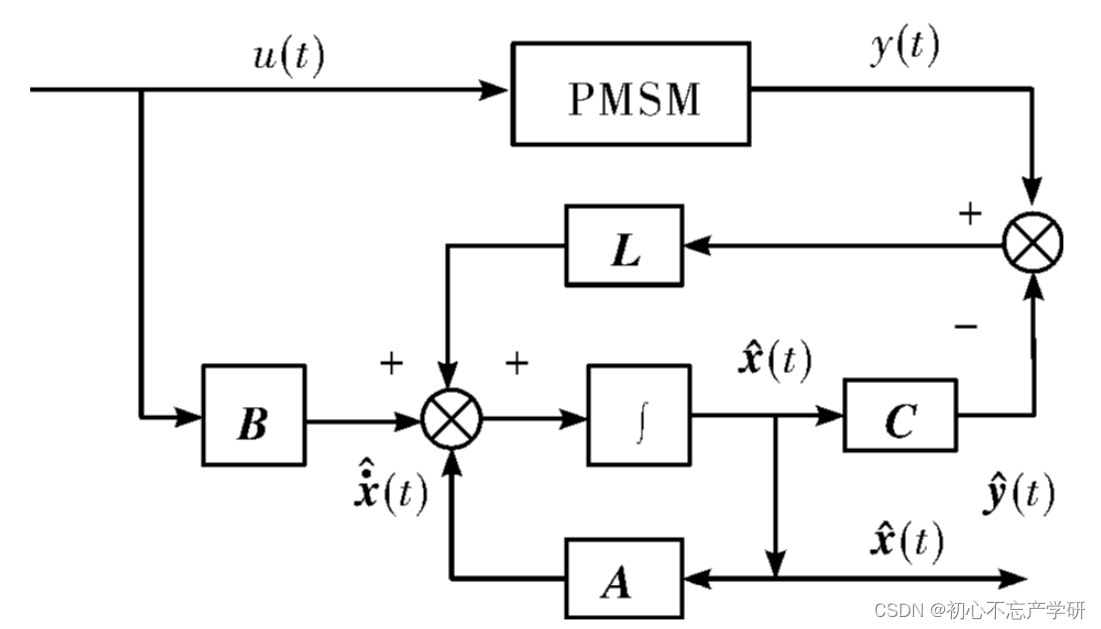
设计观测器方程:
对于Luenberger观测器,通常设计一个与原系统类似的动态方程,通过引入一个所谓的观测器增益矩阵,使得观测器状态近似等于真实系统状态。
确定观测器增益矩阵:
通过设计准则(如极点配置、最小范数、鲁棒性等)确定观测器增益矩阵。这一步可能需要求解相应的代数 Riccati 方程(对于 Kalman 滤波器)或者其他优化问题。
稳定性分析:
分析观测器的稳定性,确保观测误差系统是渐进稳定的或者指数稳定的。这意味着观测器估计的状态最终会收敛到真实状态。
仿真与实验验证:
设计完成后,通过计算机仿真和实际硬件实验来验证观测器性能,包括观测误差的收敛速度、观测误差在不同工作条件下的稳定性等。
优化与调整:
根据仿真和实验结果,可能需要对观测器参数进行微调,以达到理想的性能指标。
观测器设计是一个迭代过程,设计师需要在满足性能指标的前提下,综合考虑系统的动态特性、观测精度、计算复杂性以及实际应用条件等因素。
三、智能观测器
在控制理论中,观测器是一种用于估计系统内部状态变量的装置或算法,它通过测量系统的外部输出信号来推断系统内部的状态。观测器技术在控制系统中扮演着关键角色,特别是在状态反馈控制和故障检测与隔离中。当与人工智能(AI)技术结合时,观测器的设计和应用可以变得更加智能和自主,具体体现在以下几个方面:
数据驱动观测器设计:
利用机器学习和数据驱动的方法,可以基于大量的历史数据训练观测器模型,而不必完全依赖于系统的精确数学模型。这在处理非线性、不确定和复杂系统的观测问题时尤为有效。
智能优化观测器:
AI算法如遗传算法、粒子群优化等可以用来优化观测器的参数,使其能够适应动态变化的环境和系统条件,提高观测精度和鲁棒性。
自适应观测器:
结合人工智能的在线学习能力,可以设计自适应观测器,使其能够实时根据系统状态和环境变化调整参数,实现对系统状态的准确跟踪。
深度学习观测器:
利用深度神经网络构建观测器模型,可以模拟复杂的非线性关系,实现高维系统的状态估计。深度学习观测器可以从大量数据中自动提取特征,无需人工构造复杂的数学模型。
故障诊断与预测性维护:
AI观测器可以集成故障检测与隔离算法,通过对观测结果与正常状态进行对比分析,能够及时识别出系统故障,甚至预测未来的故障可能性,实现主动式的预测性维护。
智能控制与自主系统:
在自动驾驶、无人机导航等自主系统中,观测器与AI算法相结合,能够提供实时、准确的系统状态信息,为决策系统提供依据,实现更高层次的智能控制。
总之,人工智能技术为观测器带来了强大的学习能力和适应性,增强了观测器在处理复杂、不确定系统时的表现,使得控制系统能够更好地应对现实世界的多样性和不确定性挑战。