太极是一个面向数据的编程语言
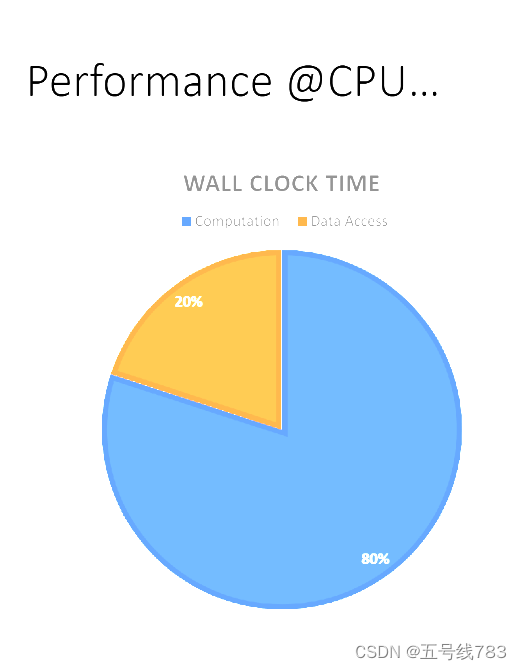
在并行计算的框架下,在计算上花费的时间反而是少数,大量的时间都花在了数据获取(也就是访问内存)上面,这一点在之前的games103课程上也有简单的提及
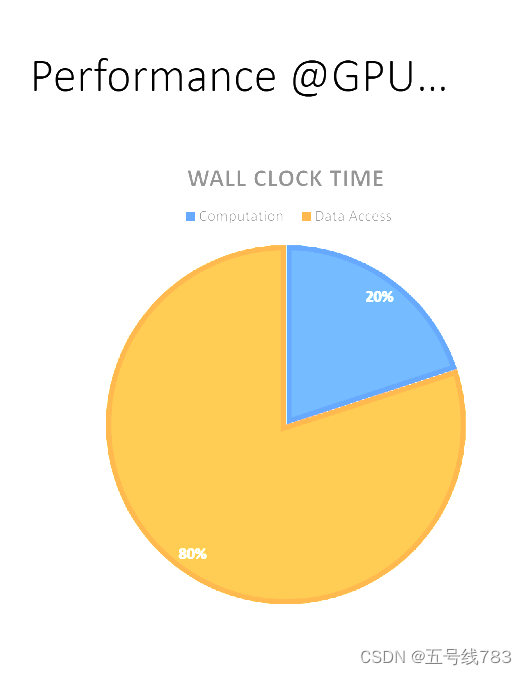
cpu的计算能力非常强大,而gpu则不同,gpu的优势在于计算的同时进行,我们要提高gpu 的运算效率需要的是如何高效的访问内存
太极语言的快速性提现在两个方面,第一自然就是并行运算,第二则是数据获取的预缓存机制
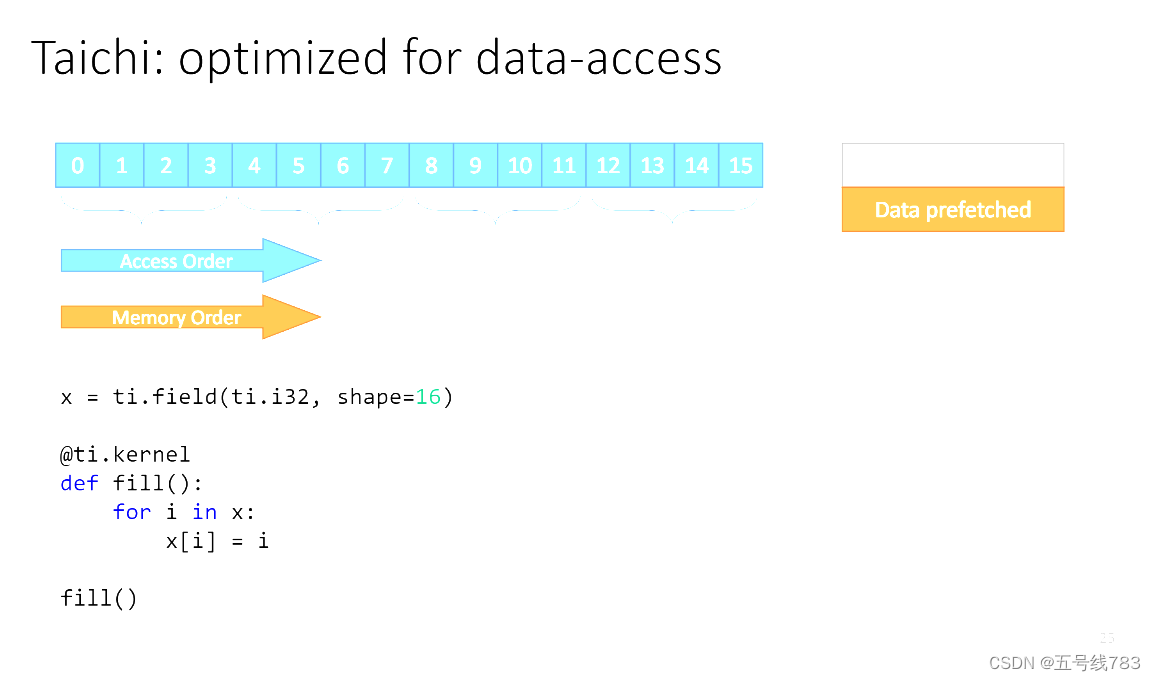
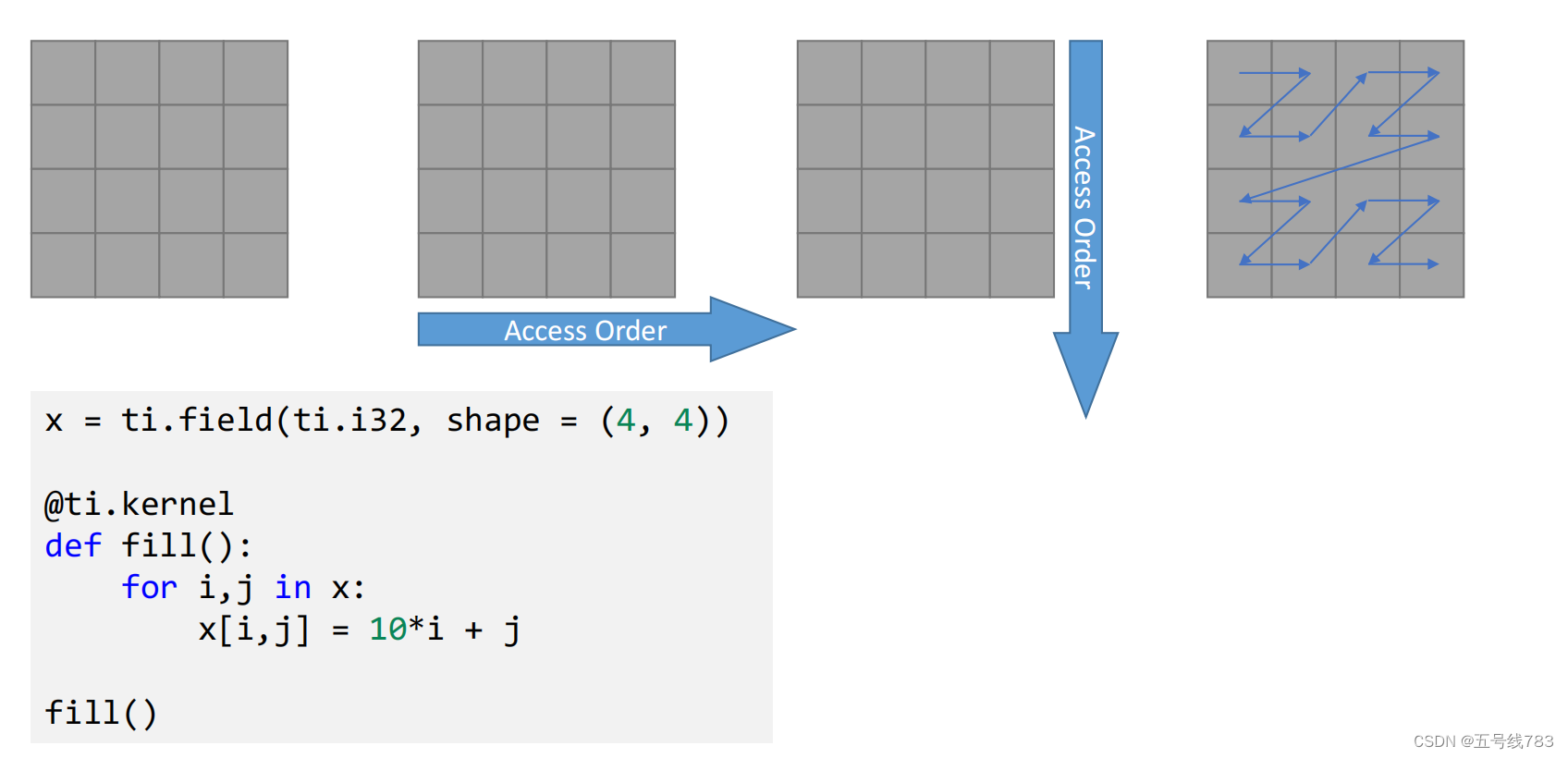
例如上面这个例子,首先定义了shape之后,在写入数据时并行处理,若是四线程的GPU处理,每一个单位填完第一个数字后(这个数字是从内存中取过来的),还会预缓存一段相邻的数字,这样填后面的数字是直接从缓存中直接取得,访问自然也就变快了
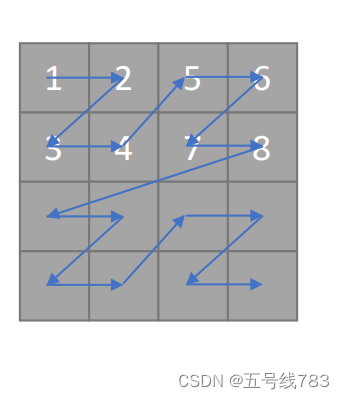
如果是多维数据呢?
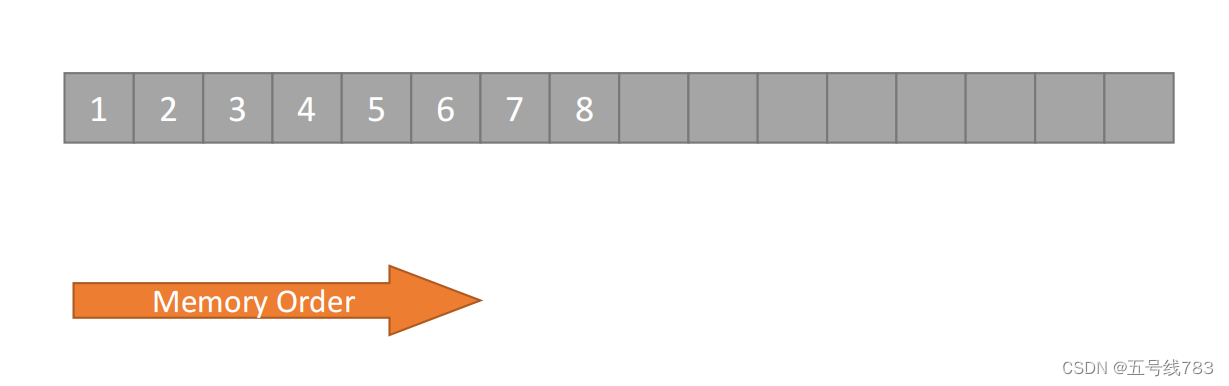
首先在内存中数据存储永远是一维的
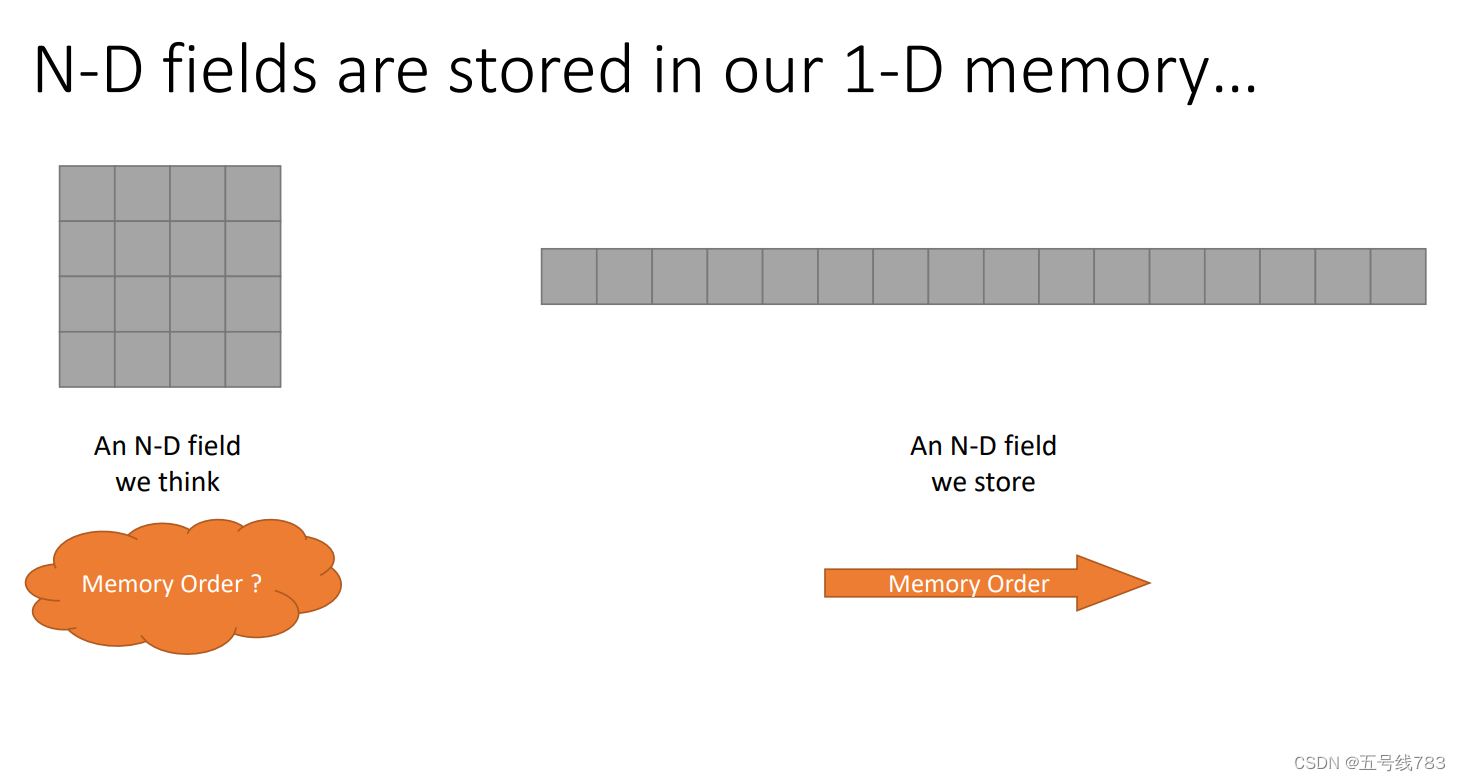
然而数据访问的模式确是不确定的
我们要将访问数据和内存数据联系起来,我们想要做的是数据访问友好化
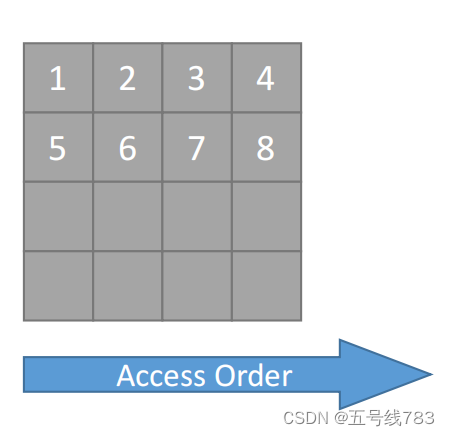
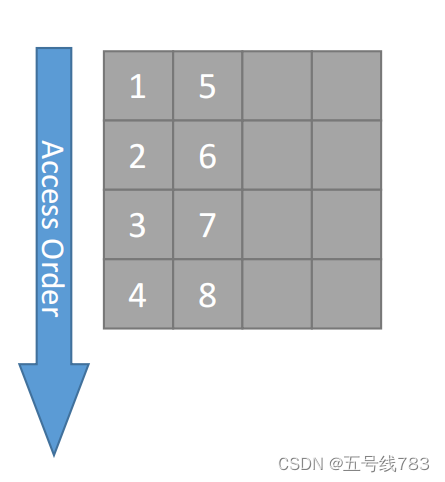
那么应该怎么存储数据呢,在C++中我们可以定义不同主序列的矩阵,如下所显示的逻辑,但这样做其实很不方便,需要人工记忆,很容易造成错误
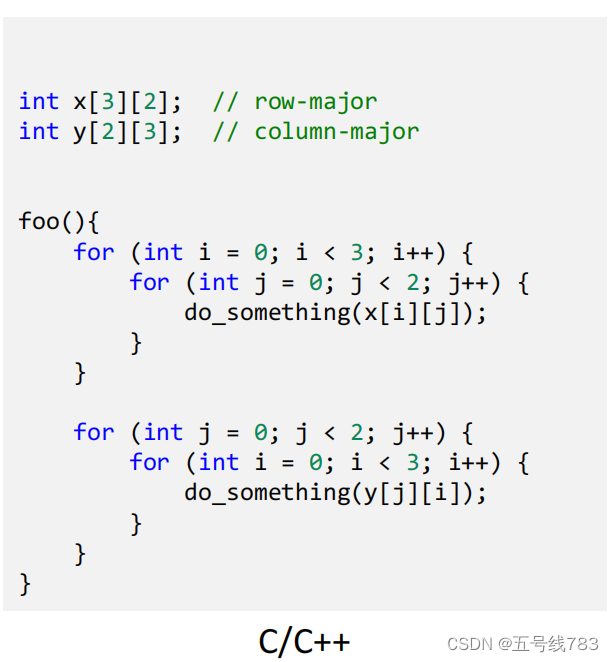
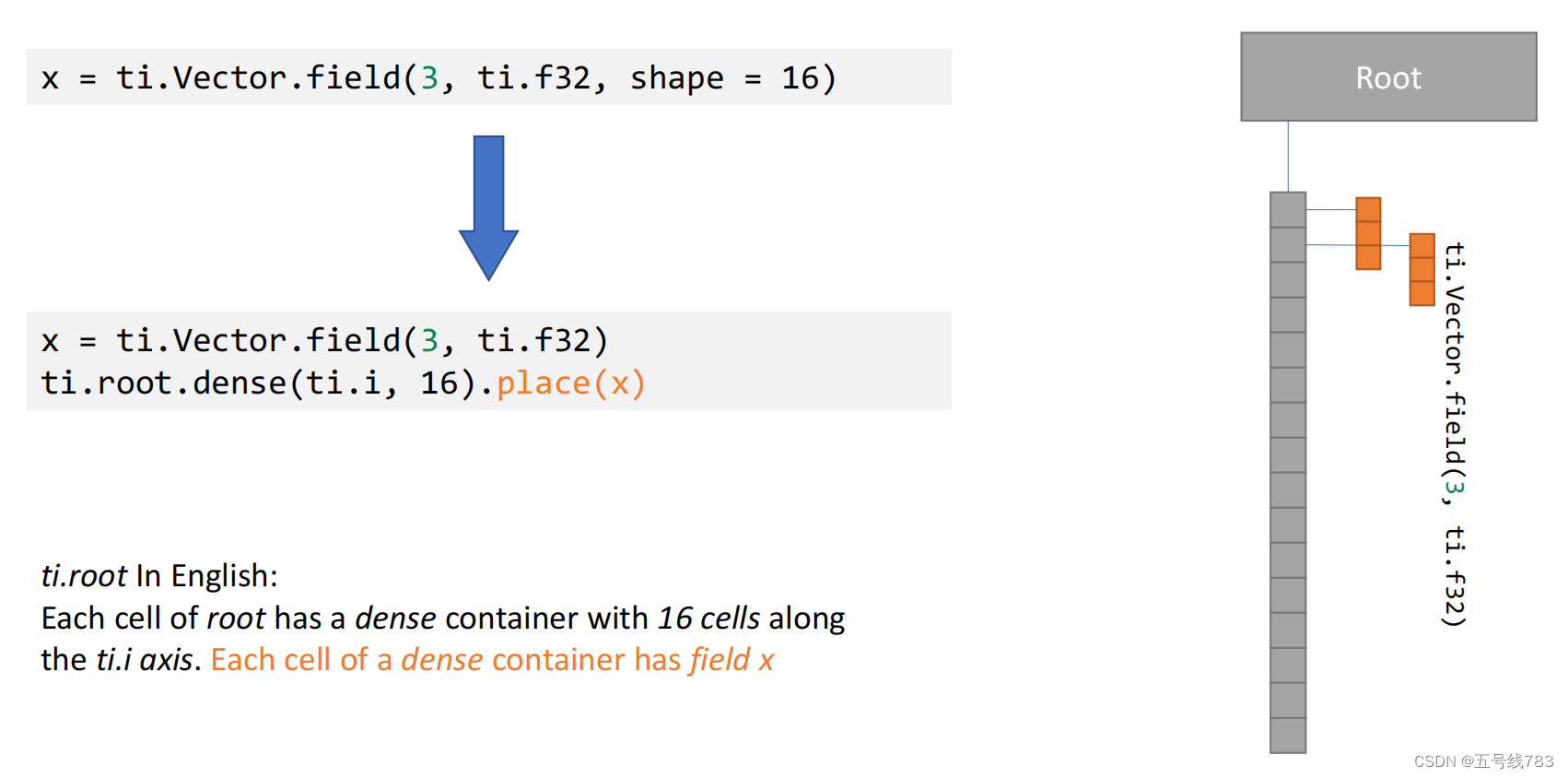
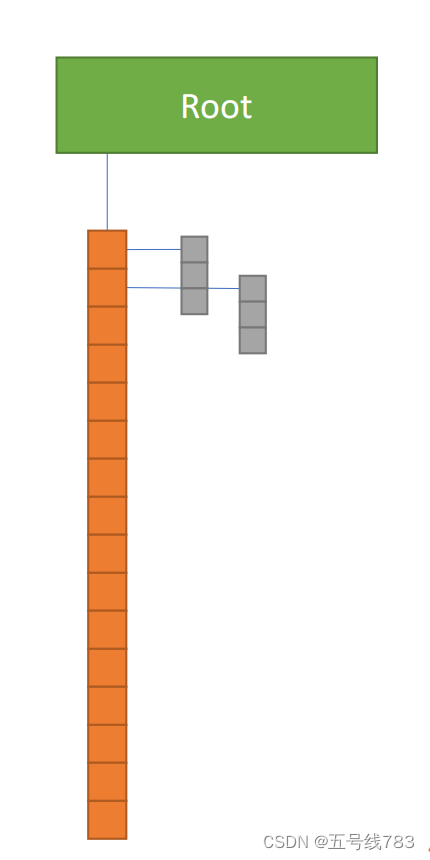
那么在taichi的做法是这样的
x = ti.Vector.field(3,ti.f32,shape=16)#这是定义了一个场,这个场中是16个(1,3)的向量
#ti.root
x = ti.Vector.field(3,ti.f32) #先不给其shape
ti.root.dense(ti.i,16).place(x)#给x定义一个shape格式为这样
#转换例子
x = ti.field(ti.f32,shape=())
x = ti.field(ti.f32)
ti.root.place(x)
x = ti.field(ti.f32,shape=3)
x = ti.field(ti.f32)
ti.root.dense(ti.i,3).place(x)
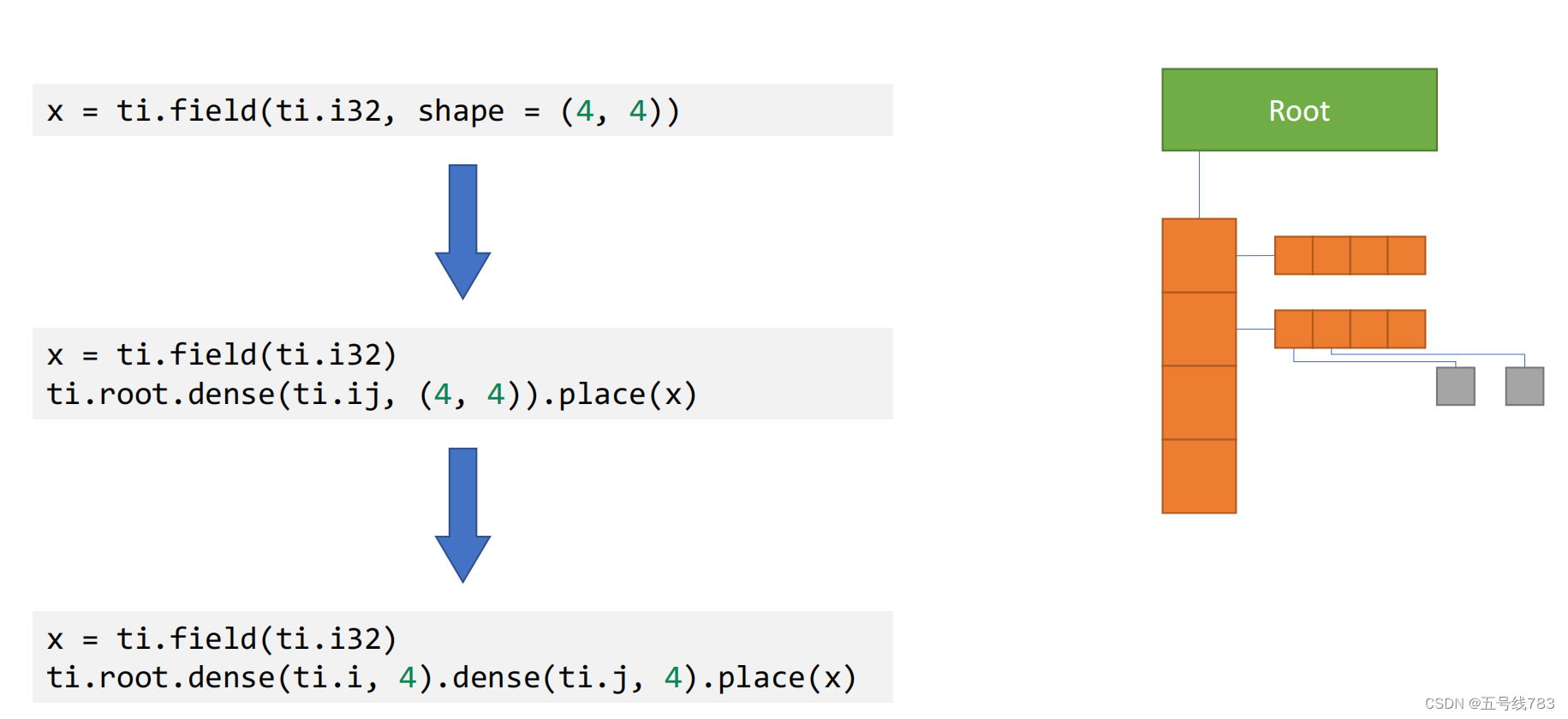
x = ti.field(ti.f32,shape=(3,4))
x = ti.field(ti.f32)
ti.root.dense(ti.ij,(3,4)).place(x)
x = ti.Matrix.field(2,2,ti.f32,shape = 5)
x = ti.Matrix.field(2,2,ti.f32)
ti.root.dense(ti.i,5).place(x)root出发,挂载的是dense,dense描述的形状,在dense后面挂着的就是那个没定义shape 的field
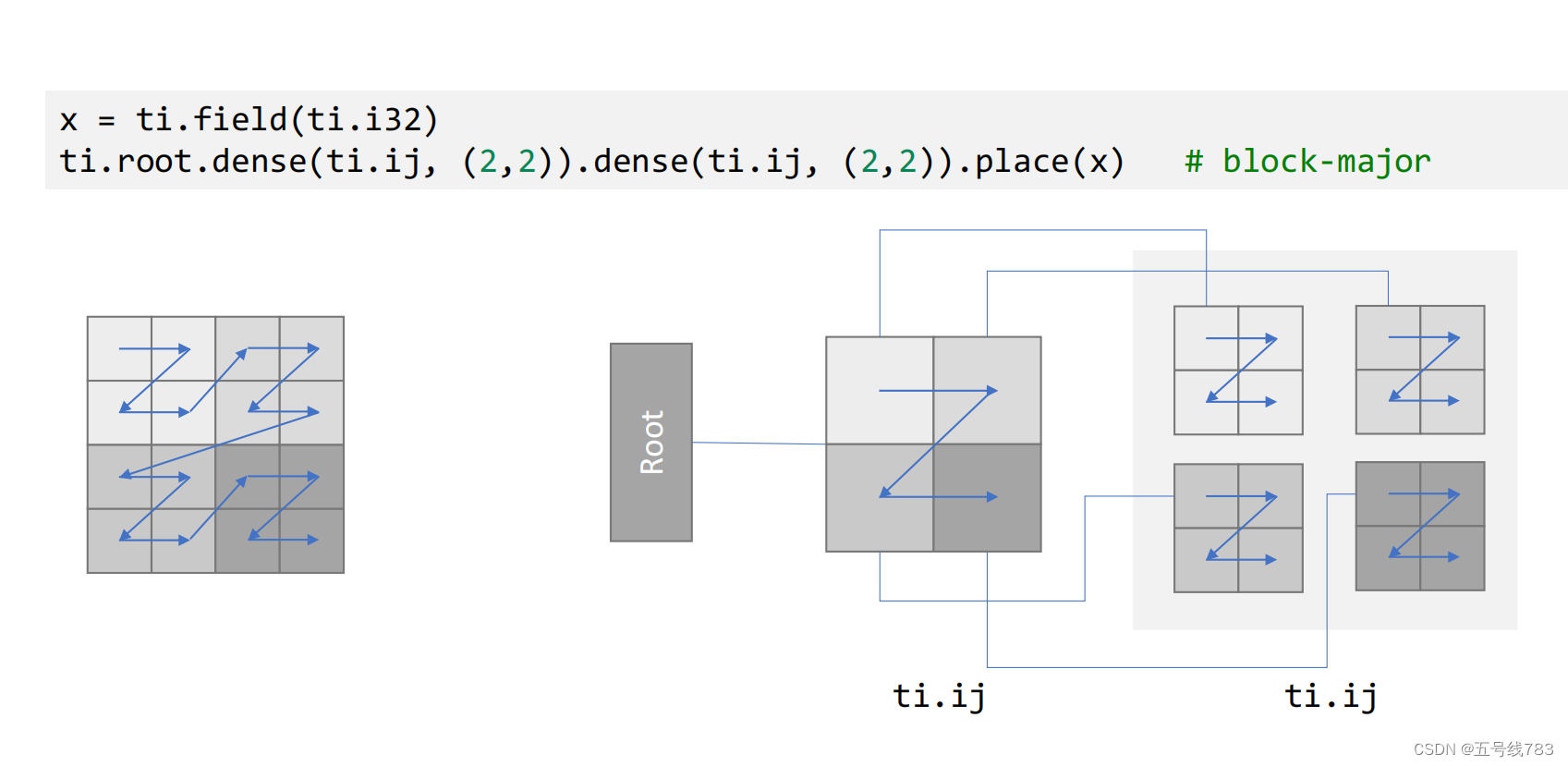
这样做的好处是可以更进一步的设计数据的结构
例如之前提出的那种矩阵形式的数据,就可以按下面的方式来存贮
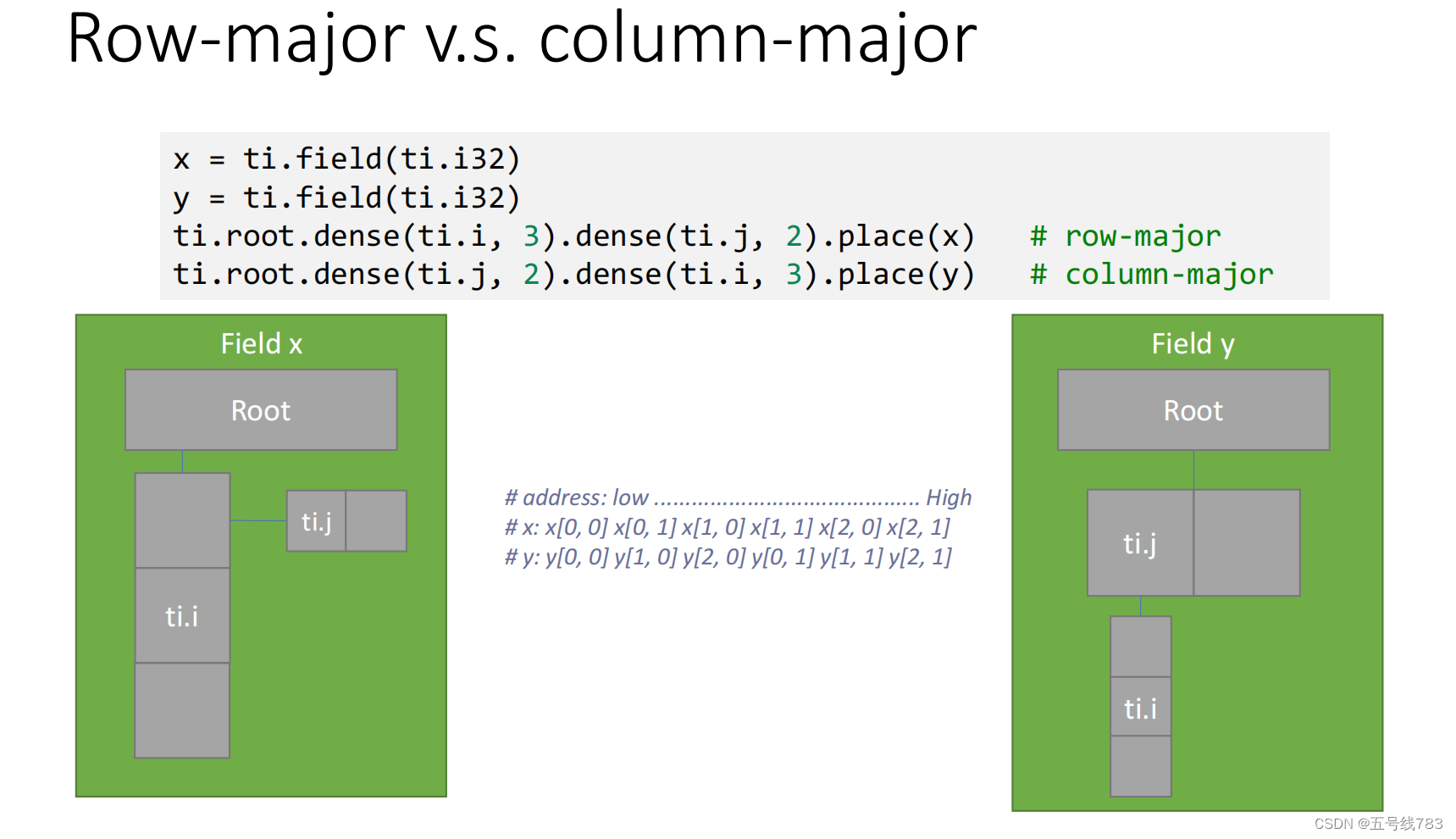
这样我们就可以这样定义一个行主序列的field
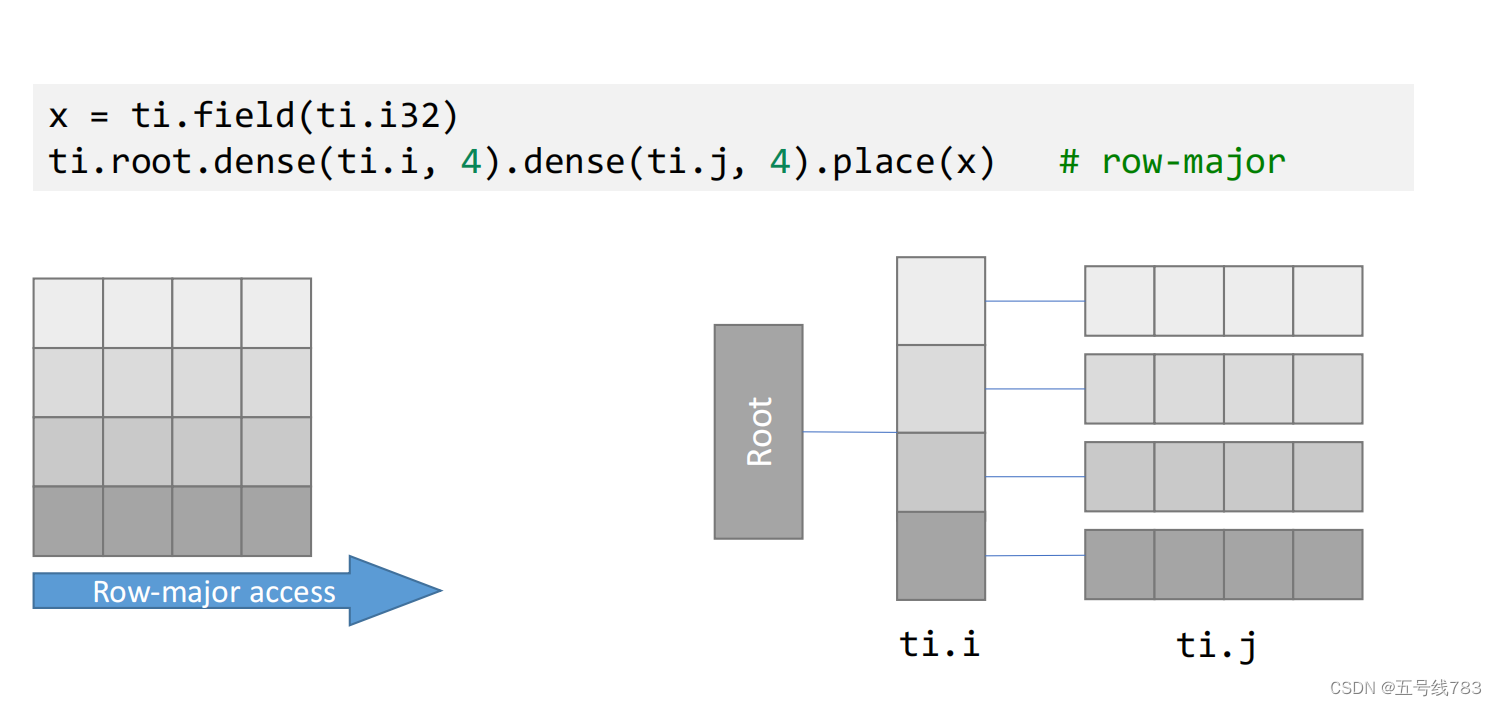
数据定义好之后,访问反而就很简单了,直接使用for语句就可以了
#以行为主序的field的定义
x = ti.field(ti.f32)
ti.root.dense(ti.i,4).dense(ti.j,4).place(x)
@ti.kernel
def fill():
for i,j in x:
x[i,j] = i*10+j层级式的数据布局
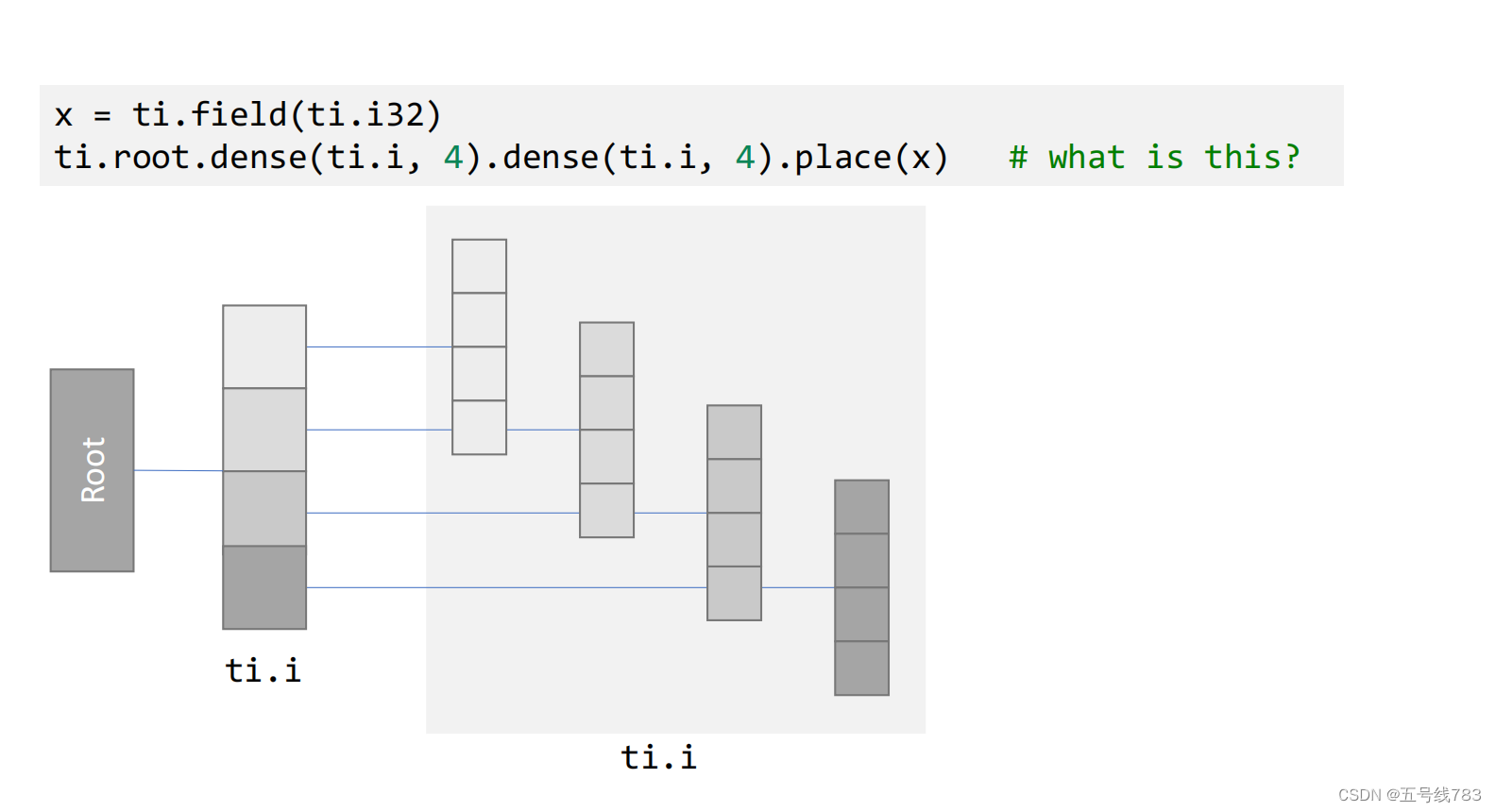
这主要使用在层级定义的方法,仍然可以用一维的方式去访问,但存储反而像是以二维的方式存储
这个数据结构在插值等这种需要访问自己邻居的算法
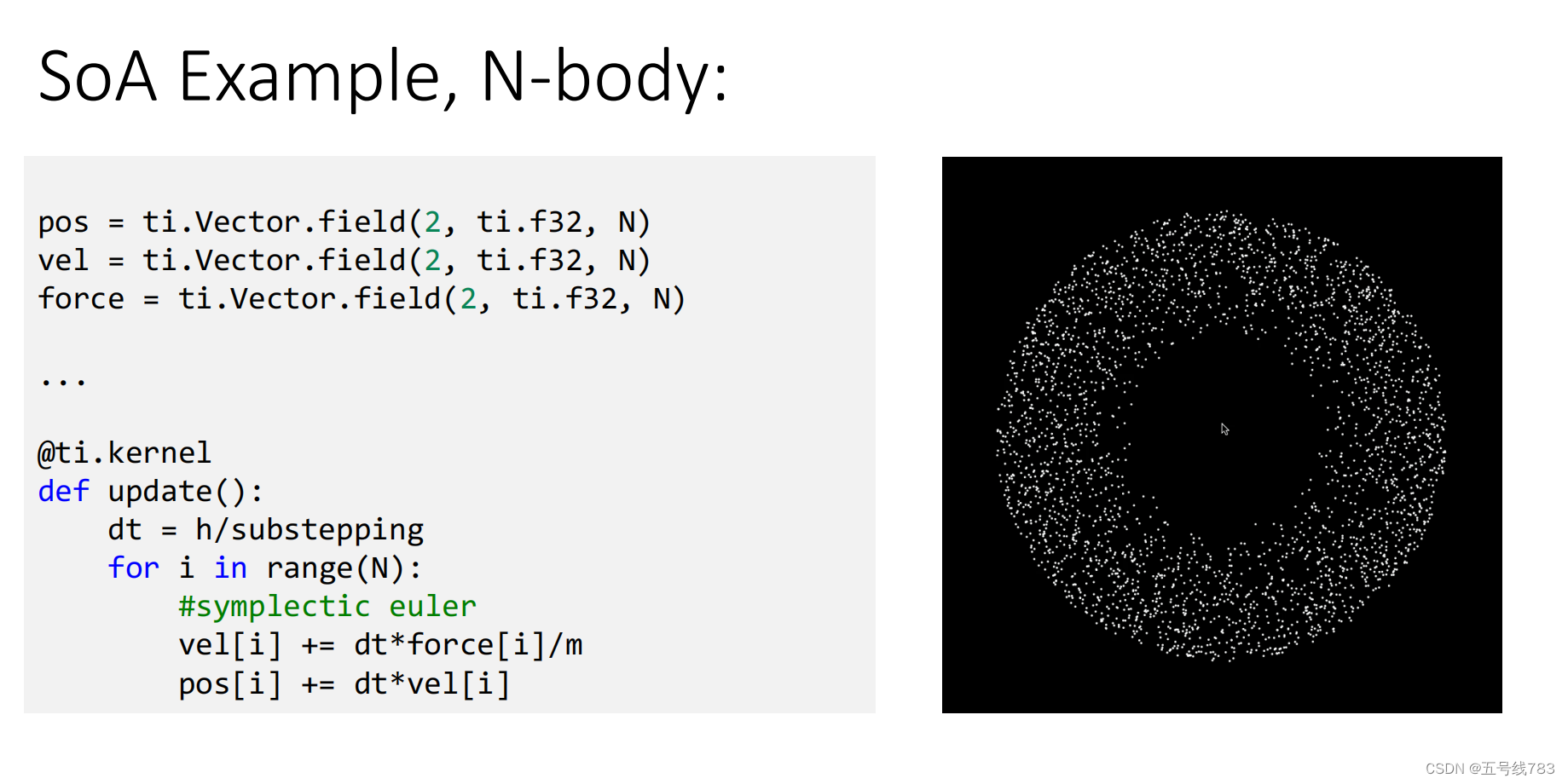
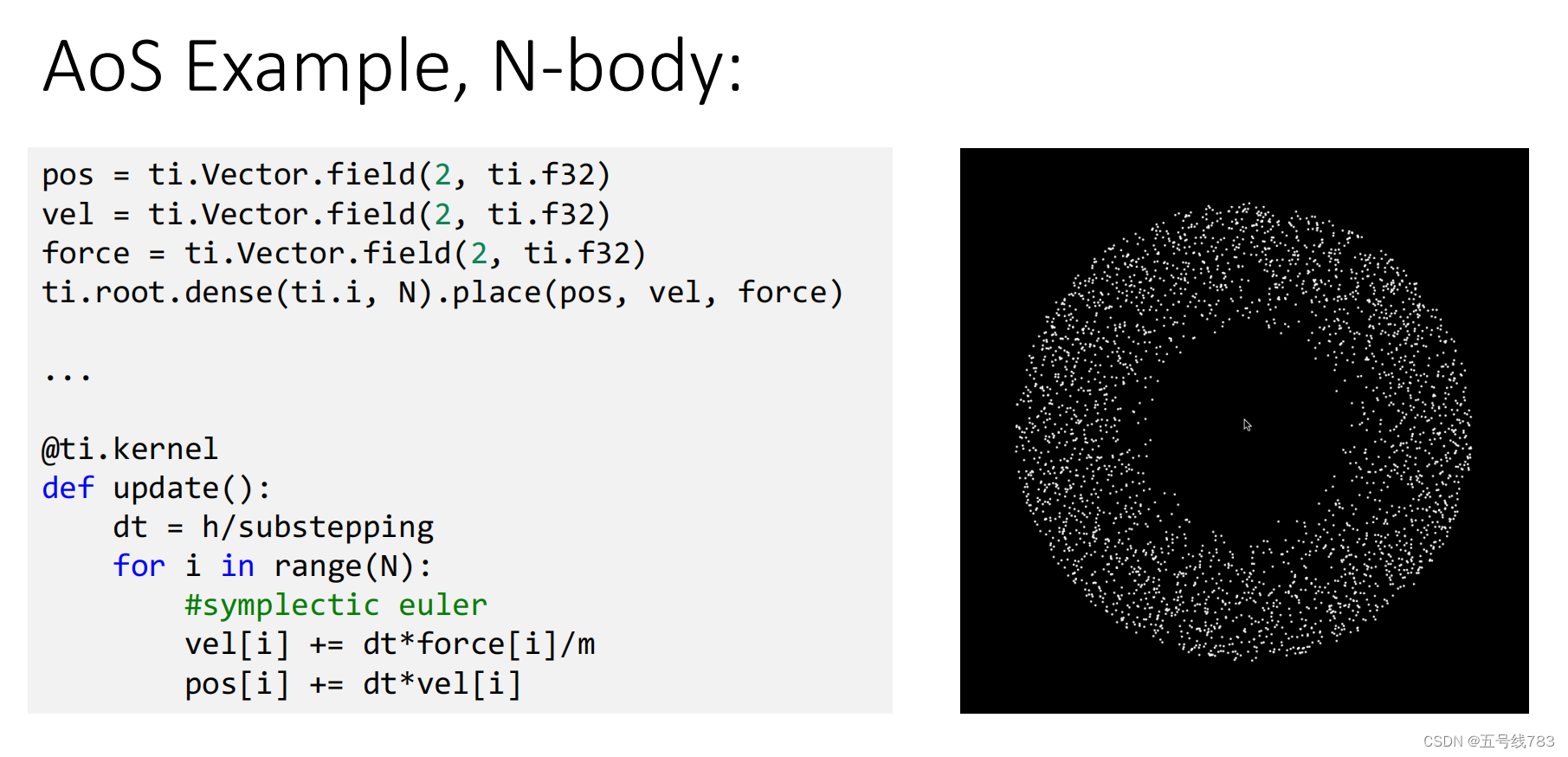
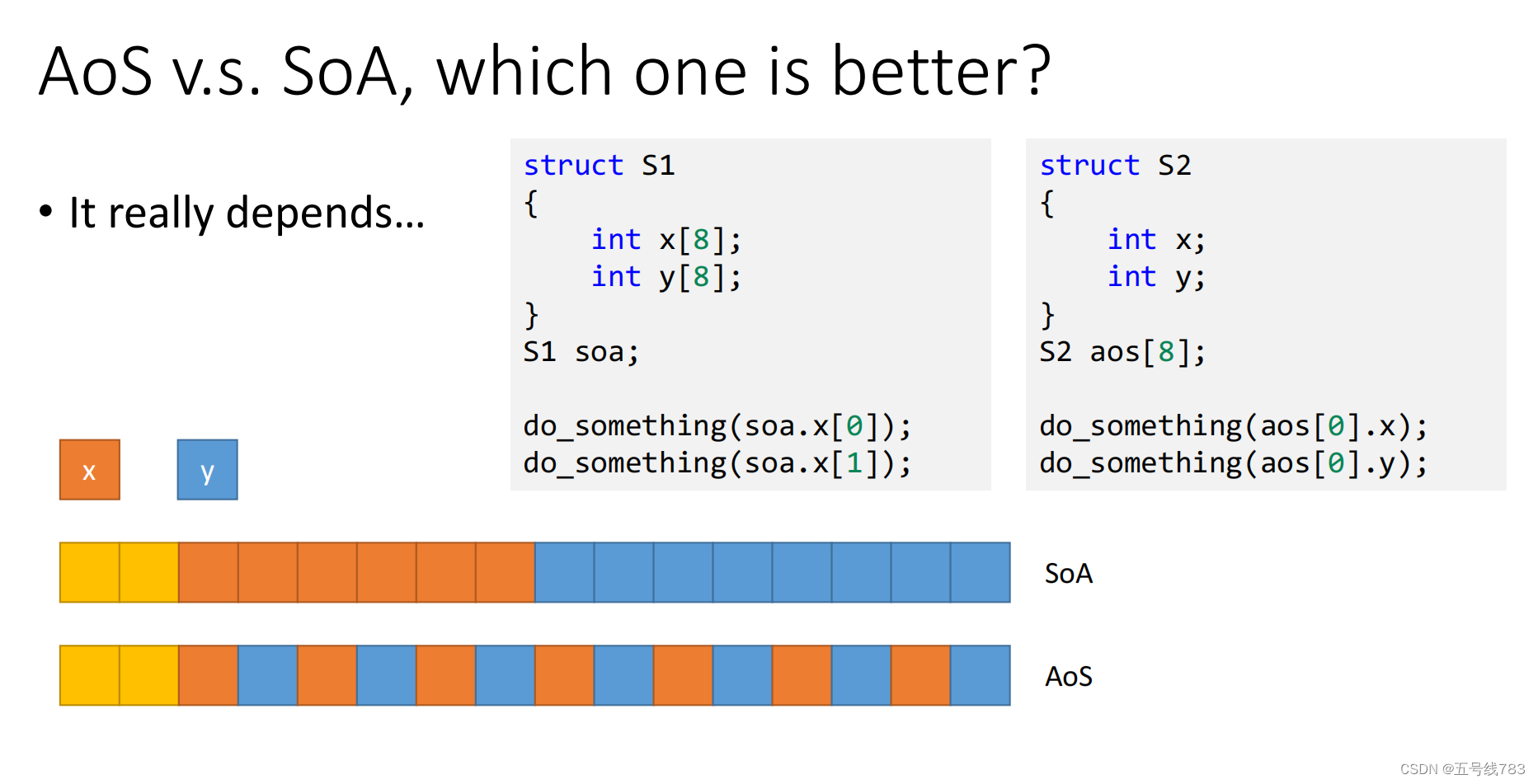
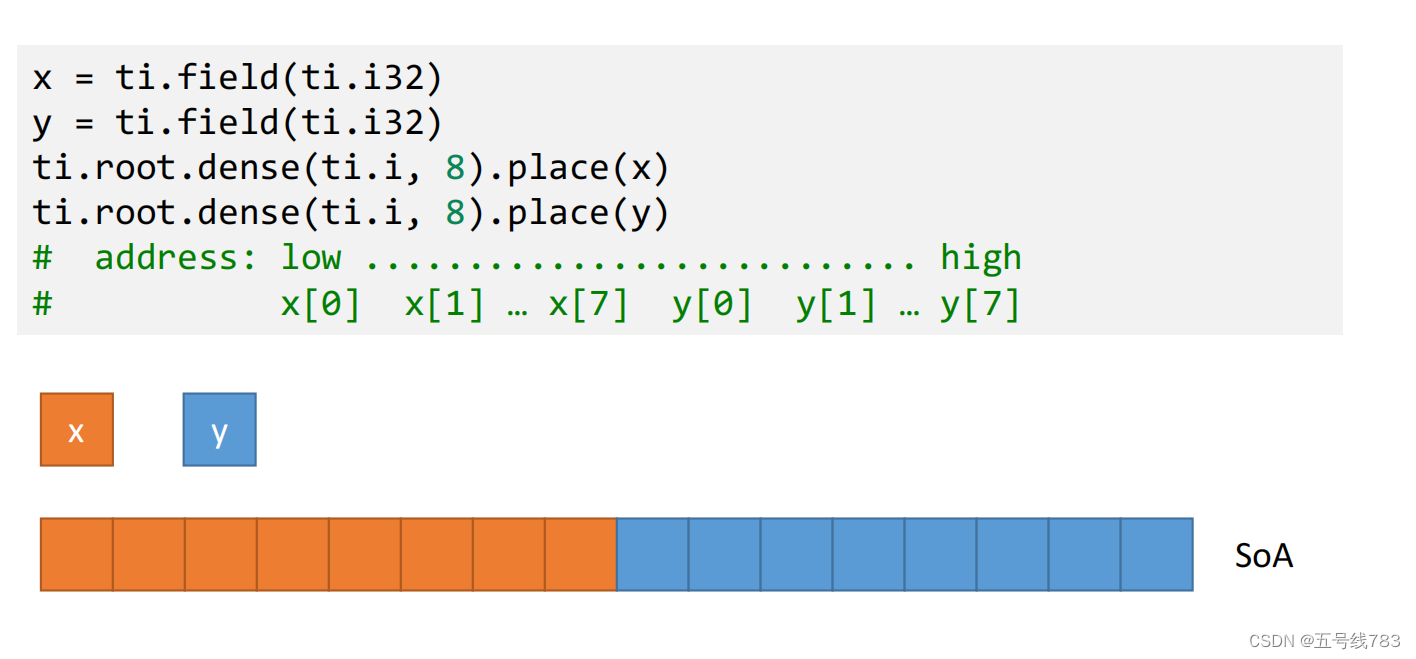
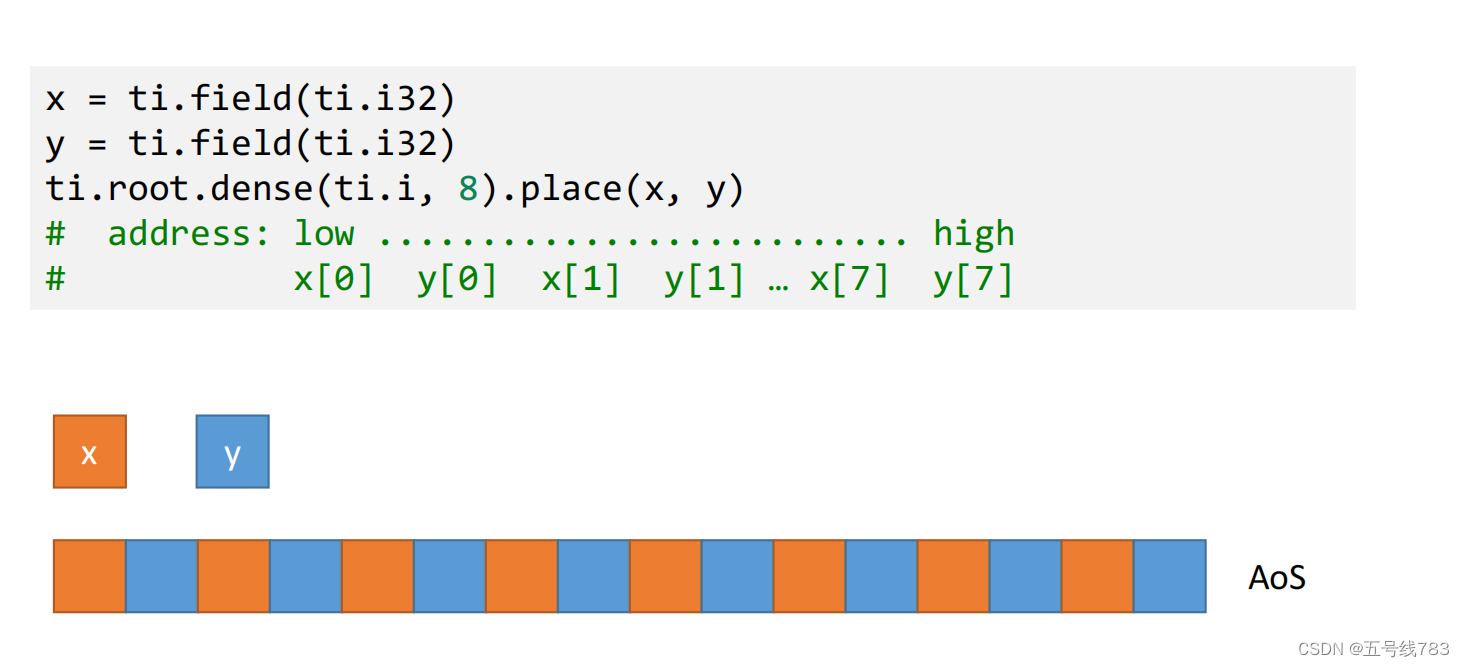
soa存贮方式和aos存贮方式
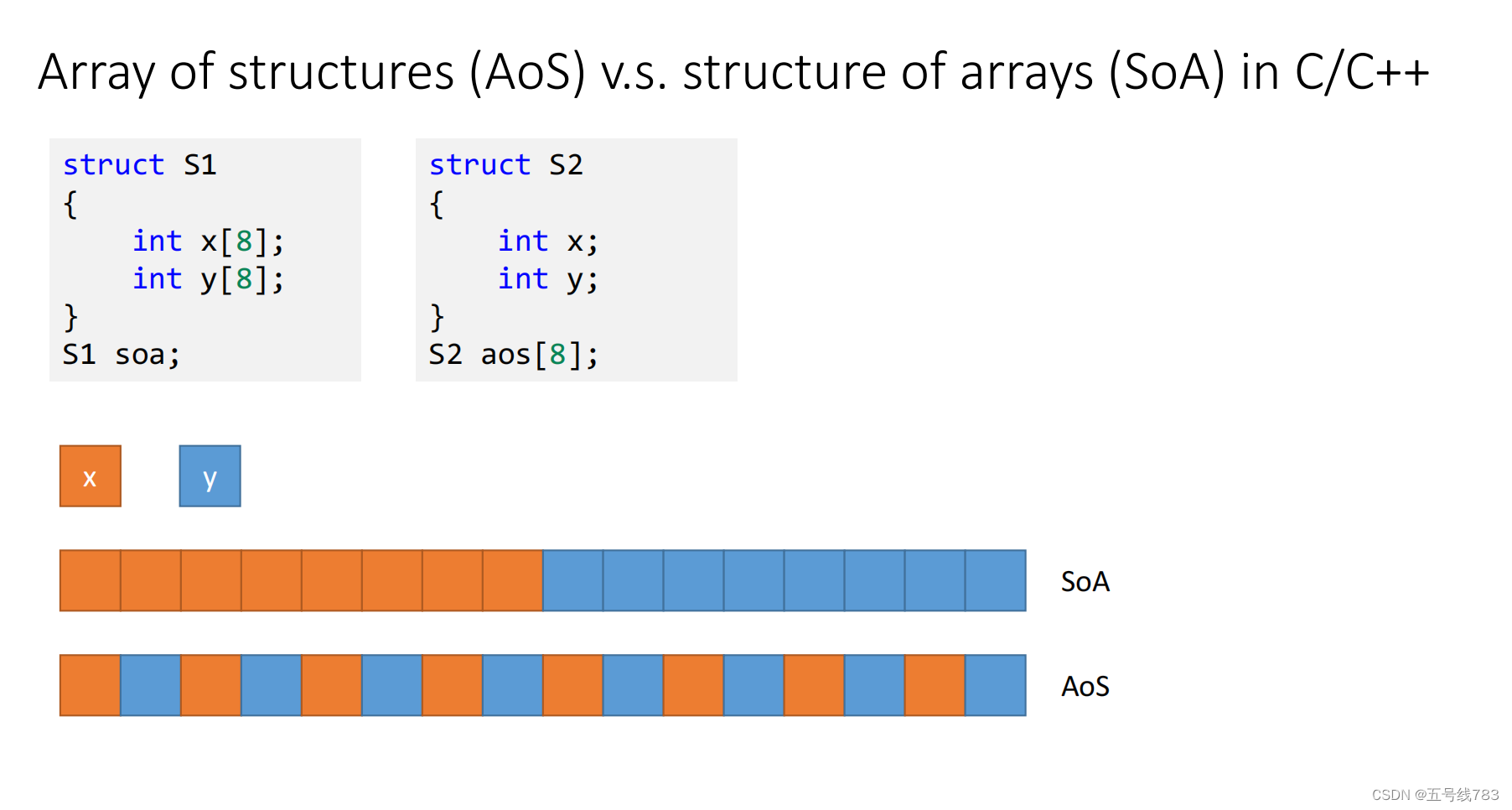
更改数据结构过后,后面的代码都不需要改
例如之间的数据