4月27日,由中国人工智能学会认知系统与信息处理专委会组织的“具身触觉社区”第一期“大咖面对面”分享活动顺利举行,我们邀请到了美国麻省理工学院(MIT)博士、视触觉传感器的奠基人、GelSight指尖传感器发明人李瑞老师为社区带来了非常精彩的报告!近200名来自高校、科研院所、工业部门等行业的同学、老师、专家学者参与了本次活动,并在讲座结束后与李瑞老师进行了热烈的交流。我们非常高兴地看到产学研各界对于触觉传感器的关注,众多青年学生与研究人员投身于触觉领域的学术研究与应用发展中来。下面将简要回顾本次分享的主要内容。
李瑞老师首先从通用机器人的角度出发展望了未来机器人在家庭服务场景与工业生产的应用,同时也分析了目前机器人技术的局限性。现有的机器人大多进行预设编程的工作,主要在较为封闭的场景中进行工作,非常缺乏自适应执行多任务的能力。究其原因,除了软件算法还未发展成熟外,硬件感知系统,特别是触觉感知的缺乏大大限制了机器人的应用场景。

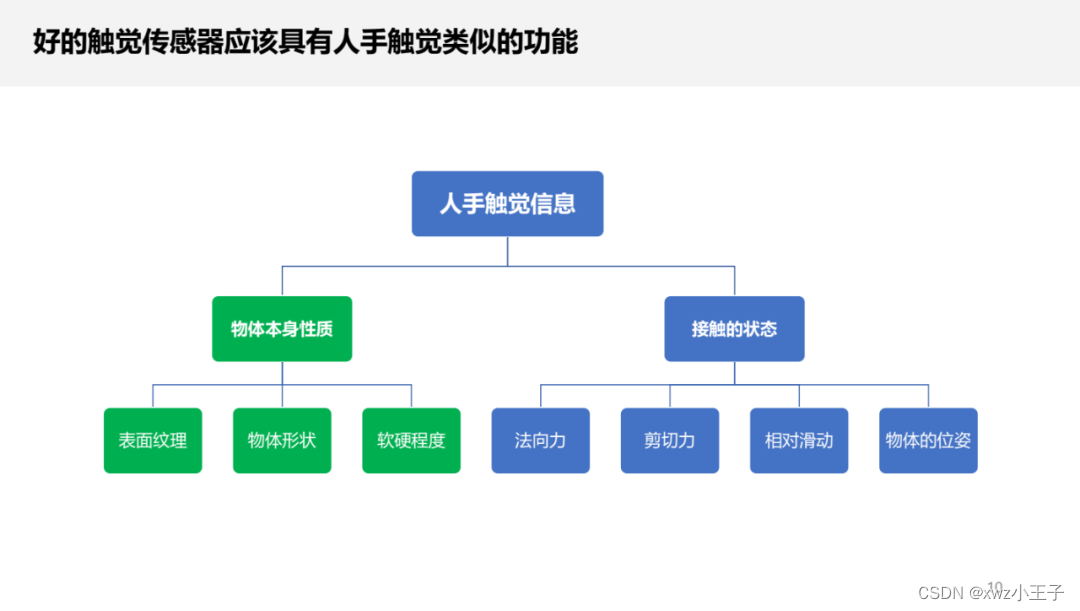
随后李瑞老师表示,高性能触觉传感器是机器人通用泛化能力的卡脖子技术,一个好的触觉传感器应该具有与人手触觉相似的感知能力。但基于压阻、电容、压电等原理的传统触觉传感器通常分辨率较低,主要获取法向力而难以获得在操作中极为重要的切向力,同时易受温湿度、磁场等环境因素影响,难以满足机器人类人感知和通用化操作的需求。
视触觉传感器作为一种基于视觉的触觉感知手段,是将与物体接触过程中导致的形变信息(对应触觉信息)转换为图像信息,随后通过图像处理和计算机视觉技术反推触觉信息的感知模式。视触觉传感器相比传统触觉传感器有诸多优势,可获得与人手触觉类似的信息,是实现通用机器人高性能触觉感知能力极具潜力的传感方式,近年来受到了全球学术界和产业界的重大关注和深入研究。

李瑞老师在MIT读博期间师从美国科学院院士、美国人文与科学院院士Edward Adelson教授,在博士阶段专门针对机器人应用,发明了全球第一款具有超高分辨率的柔性视触觉传感器:GelSight指尖传感器,对于机器人的视触觉领域具有开创性的意义和重大影响力。李瑞老师详细的分享了如何将视觉应用于触觉的研究思路,为大家带来了诸多的启发。同时还分享了GelSight视触觉传感器在机器人领域的各项应用,并在随后十年间开创了机器人视触觉研究的新方向。
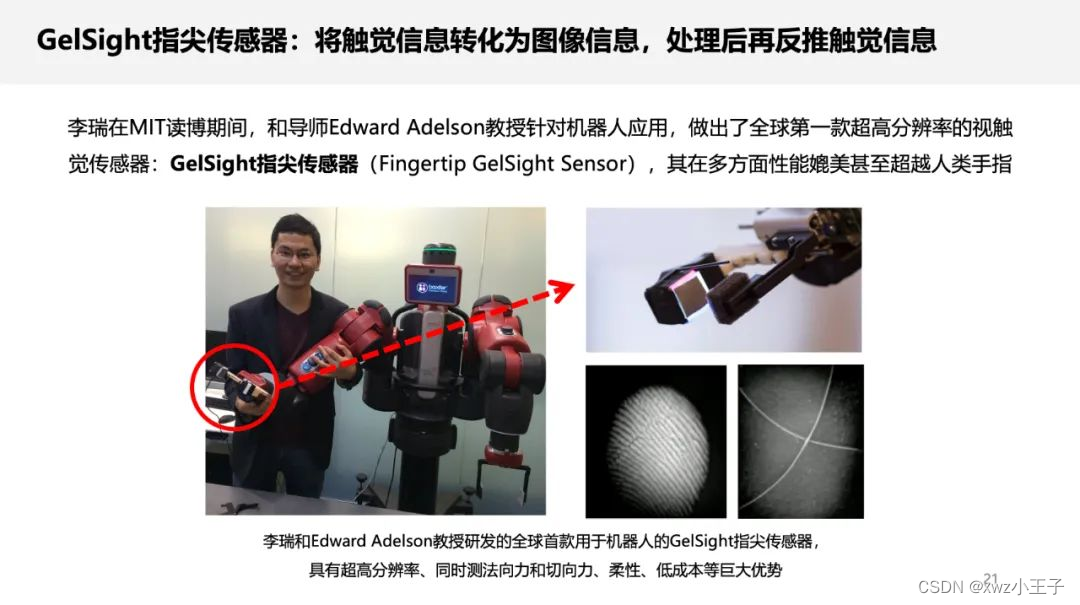
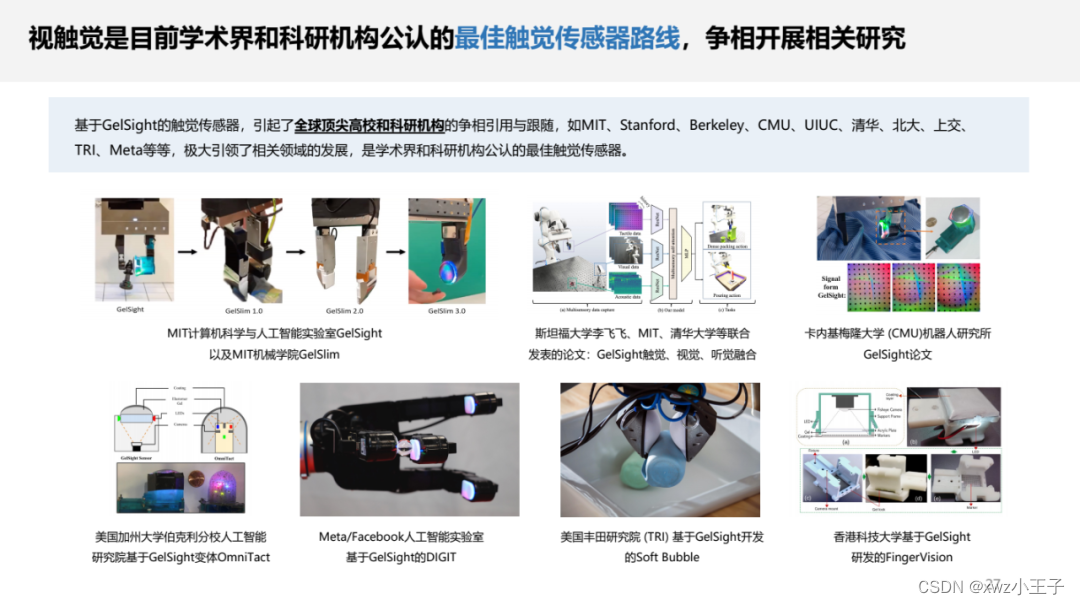
GelSight指尖传感器专门针对机器人手指尖的触觉而设计,在多方面性能可以媲美甚至超越人类手指,是全球第一款具有超高分辨率的视触觉传感器(每平方厘米可高达几万到几百万个触觉信息点(10微米级别),而其他传统触觉传感器仅有几个到几十个信息点),可同时感知法向力和切向力,且具有柔性与低成本等巨大优势,被全球各大顶尖高校和科研机构的研究人员广泛采用和深入研究,如MIT、Stanford、CMU、UC Berkeley、UIUC、牛津、剑桥、清华、北大、上交、浙大等等。李瑞老师及Edward Adelson研究小组在CVPR、ICRA、IROS、RSS等全球顶尖机器人与人工智能会议上发表了一系列开创性和奠基性的论文,相关研究获得多个顶会的“最佳论文奖”。李瑞老师向大家分享了GelSight指尖传感器在滑移检测、精细化操作与闭环控制、材质识别、硬度测评、折叠衣物等方面的研究和应用,为大家充分展示了高分辨率视触觉传感器的优势与广阔的应用领域。
李瑞老师指出,与视觉类似,触觉对于机器人的灵巧操作和通用泛化能力同样至关重要,要想实现真正的类人通用机器人,触觉和视觉两者互为补充,缺一不可,主要可以体现在三个方面:第一,触觉可以作为视觉的延伸,机器人操作的过程中经常会有视线遮挡,而触觉可以很好的补充视觉信息;第二,触觉可以获得视觉无法获得的信息,如接触状态和力的信息,在操作中可以帮助实时判断接触的情况,及时作出响应;第三,视觉可以起到大致的引导,而触觉可以实现更加精细化的闭环控制,手眼协同可以大大的拓展机器人的能力上限。以GelSight为代表的视触觉传感器正因为诸多优势和触觉的重要性,是目前产学界最具有潜力的触觉传感器技术路线,广受关注和欢迎。
最后,李瑞老师结合自身的经验分享了以GelSight为代表的视触觉传感器在产业化方面的思考。目前视触觉传感器还主要局限于科研领域的应用,但是在工业场景、大健康领域、商业服务领域和通用机器人领域等都将具有广泛的应用场景,同时其低成本的优势也将有助于商业化的实现。
在讲座的最后,李瑞老师和与会的老师同学、专家学者进行了热烈的讨论,详细解答了视触觉传感器制备、表面工艺、光源和光路设计原理与产品化思考等方面的问题,从专业技术与宏观思考的角度深入浅出地进行了分析与解释。
经过热烈的互动和交流,大家收获非常多的技术干货和方向性的思考,并对李瑞老师和社区表达了感谢。在会议的最后,大家一起为具身触觉社区的第一次分享活动合影留念。



![[ACTF新生赛2020]SoulLike](https://img-blog.csdnimg.cn/direct/8d855ffecc734012b65dc7c51c224753.png)


![宝塔纯净版 7.6.0版本无需手机登录 [稳定版本/推荐]](https://img-blog.csdnimg.cn/direct/3d809472fdcd44058e69e8dec8ab0b8e.png)