SPI 协议简介
SPI 即 Serial Periphera linterface 的缩写,顾名思义就是串行外围设备接口,主要用于与FLASH、实时时钟、AD 转换器等外设模块的通信,它是一种高速的全双工同步的通信总线。
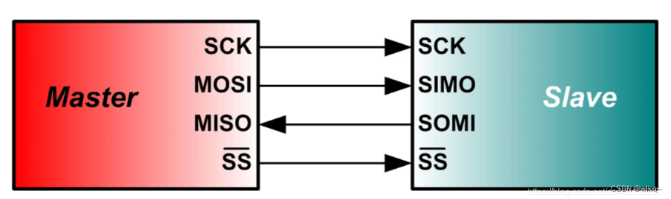
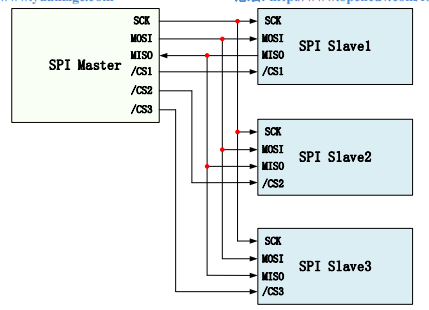
SPI 设备分为主设备和从设备,SPI 通信必须由主设备发起,主设备通过片选引脚(CSn)来选择对应的从设备,通过时钟引脚(SCK)向从设备提供时钟,通过数据输出引脚(MOSI)引脚向从设备发送数据,通过数据输入引脚(MISO)引脚来读取从设备返回的数据,如下是 SPI 的总线拓扑图(分别是1个主设备对应1个从设备和1个主设备对应多个从设备):
SPI 时序
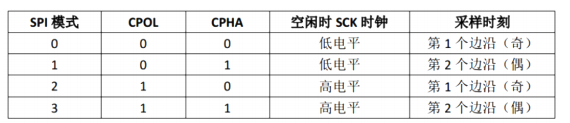
通过 SPI 的时钟极性(CPOL)和相位( CPHA)可以组合出4种工作模式,如下表所示是对应的4种工作模式:
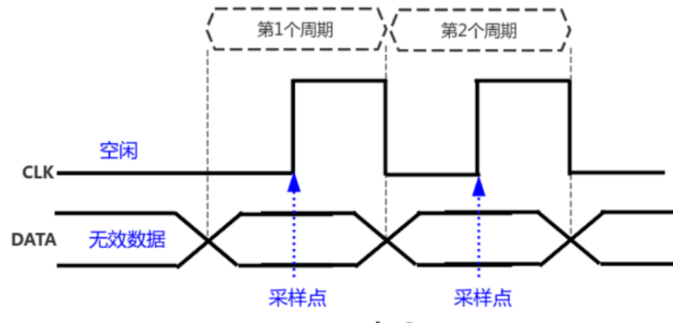
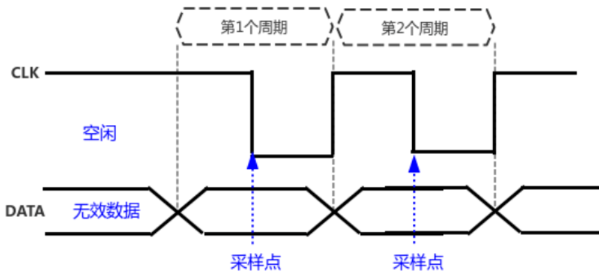
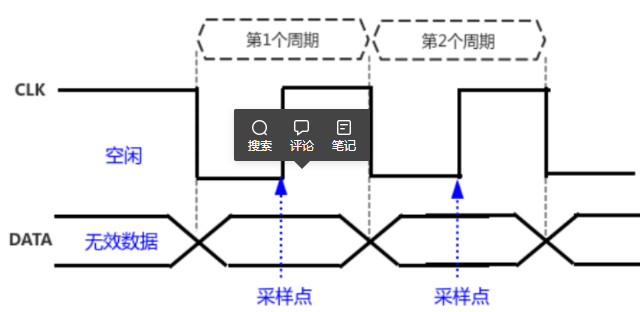
- 模式0(CPOL = 0, CPHA = 0)
CPOL = 0:空闲时是低电平,第一个跳变沿是上升沿,第二个跳变沿是下降沿
CPHA = 0:数据在第一个跳变沿(上升沿)采样
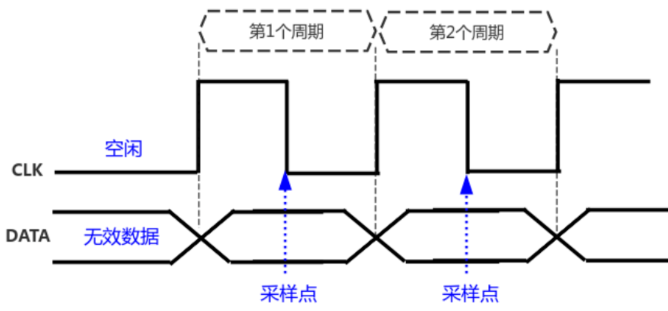
- 模式1(CPOL = 0, CPHA = 1)
CPOL = 0:空闲时是低电平,第一个跳变沿是上升沿,第二个跳变沿是下降沿
CPHA = 1:数据在第二个跳变沿(下降沿)采样
- 模式2(CPOL = 1, CPHA = 0)
CPOL = 1:空闲时是高电平,第一个跳变沿是下降沿,第二个跳变沿是上升沿
CPHA = 0:数据在第一个跳变沿(下降沿)采样
- 模式3(CPOL = 1, CPHA = 1)
CPOL = 1:空闲时是高电平,第一个跳变沿是下降沿,第二个跳变沿是上升沿
CPHA = 1:数据在第二个跳变沿(上升沿)采样
FLASH 简介
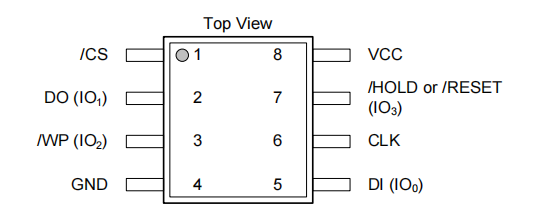
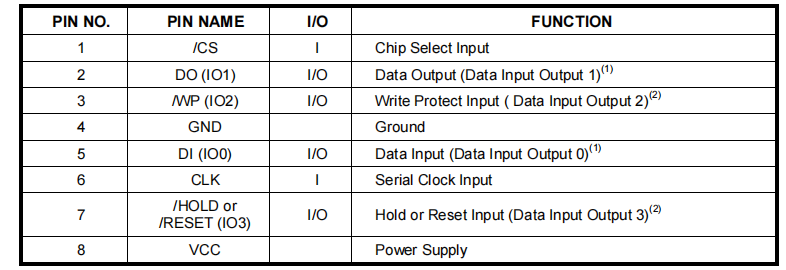
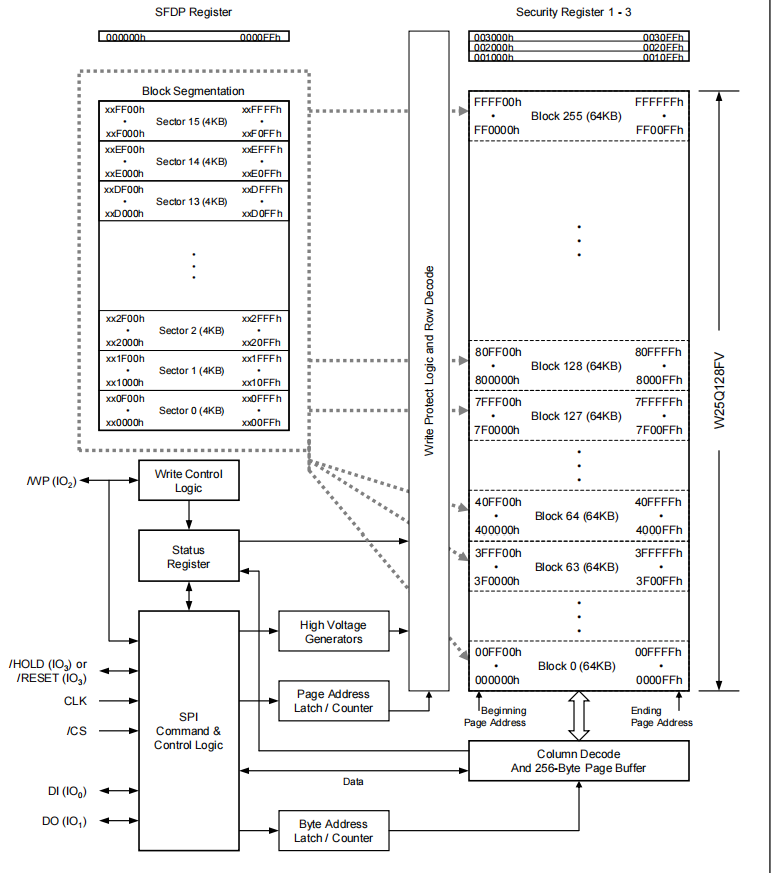
实验使用的 FLASH 芯片型号为W25Q128,它是华邦公司推出的一款的 NOR FIash 芯片,其存储空间为128 Mbit,相当于16MB,支持 Standard SPI、Dual SPI 和 Quad SPI 三种 SPI 协议通信方式,最大传输数据速率可达104MHZ,如下是芯片的引脚示意图:
存储结构
整个存储阵列被分成被为 256 给我块,每个块又分为 16 个扇区,每个扇区由分为 16 个页,每页包含 256 个字节。
操作指令
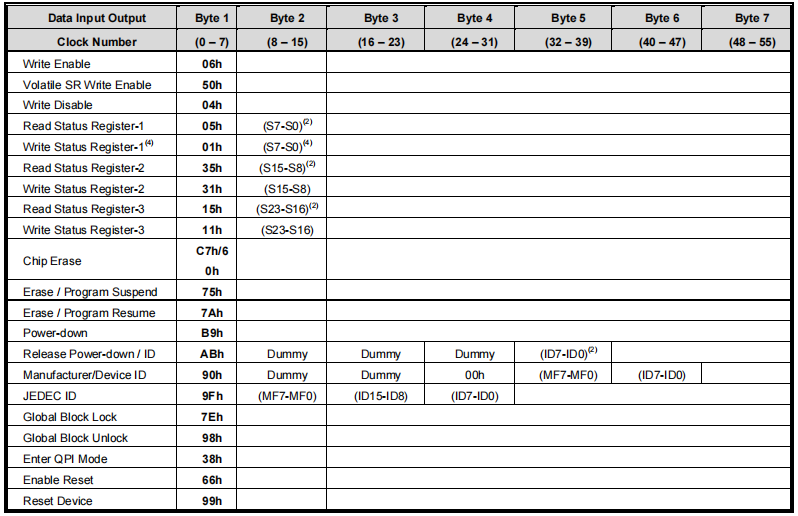
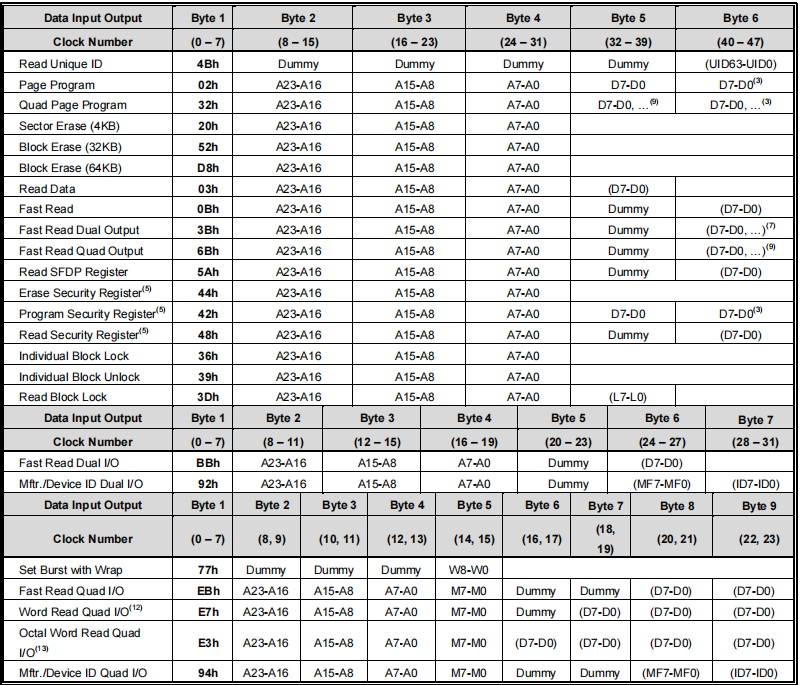
FLASH 操作指令有很多,其中常用的有读ID指令(0x9F)、写使能指令(0x06)、扇区擦除指令(每次擦除4KB,0x20)、全擦除指令(0xC7)、读指令(0x03)、写指令(又叫页编程,0x02)、读状态寄存器1指令(0x05)。
FLASH 操作时序
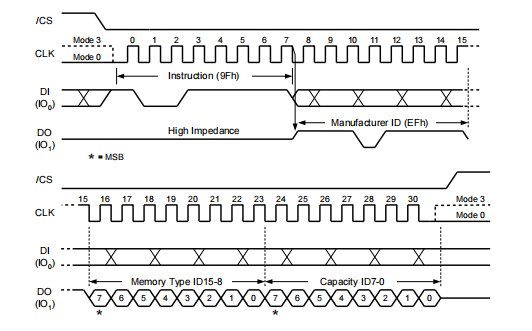
- 读ID指令
在操作 FLASH 之前应读取其ID,校验 FLASH 型号,如下是读 ID 的时序:
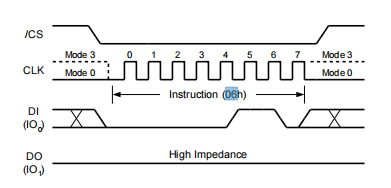
- 写使能指令
在进行擦除、写入操作前需要先发送写使能指令,其时序如下:
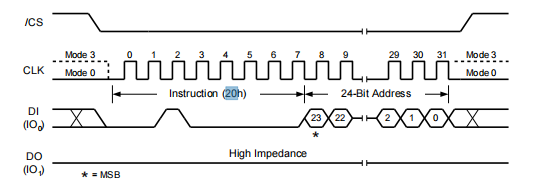
- 扇区擦除指令
W25Q128在写数据时只能将1修改为0,所以在写入新数据之前必须要进行擦除操作,将FLASH中的存储单元全部设置为1,如下是扇区擦除时序:
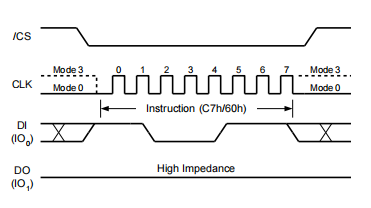
- 全擦除指令
除了扇区擦除指令外,还有全擦除指令,其时序如下:
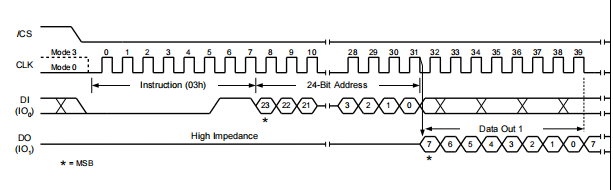
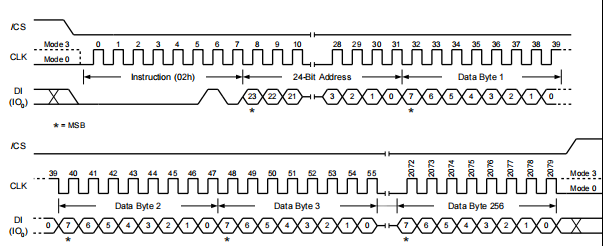
- 读指令
读取 FLASH 一次可以读取多个字节,其时序如下:
- 写指令
向 FLASH 写入数据时不能跨页(页大小256B),若需要写入多页或者写入数据跨页则需要分多次写入,如下是写入数据的时序:
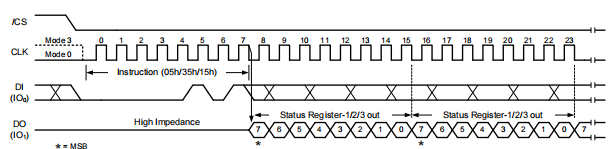
- 读状态寄存器1指令
在进行擦除、写入操作后需要轮询状态寄存器0的bit0,以检查擦除或写入操作是否结束(全擦除指令耗时很长),如下是读状态寄存器的时序:
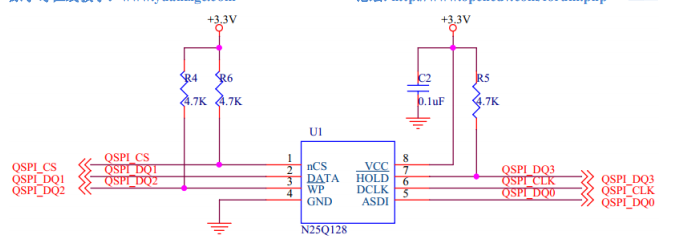
硬件设计
FLASH 芯片的硬件原理图较为简单,芯片本身就 8 个引脚,其原理图如下:
代码编写
代码一共分为3个模块,分别是 SPI 驱动模块、FLASH 驱动模块、FLASH 读写测试模块,其功能如下:
SPI 驱动模块;提供 SPI 总线收发数据的功能。
FLASH 驱动模块;基于 SPI 驱动模块实现 FLASH 的一些基本操作,如读 ID、写使能、写、擦除、读、读状态寄存器等。
FLASH 读写测试模块;利用 FLASH 驱动模块提供的 FLASH 基本操作进行 FLASH 读ID、擦除、写、读等测试,测试过程中状态 LED 常灭,测试出错状态 LED闪烁,测试完成状态 LED 常亮。
SPI 驱动模块
module spi_driver #(
parameter SPI_CS_MAX = 1, //片选数量
parameter SPI_BITS = 8, //SPI位宽
parameter SPI_CLK_PERIOD = 4, //SPI时钟周期,以系统时钟为参考,最小为4
parameter SPI_MODE = 0, //SPI模式
parameter ALMOST_DONE_ADVANCE = 0, //即将传输完成信号提前输出时间,小于SPI_CLK_PERIOD-1
parameter ALMOST_IDLE_ADVANCE = 0 //即将空闲信号提前输出时间,小于SPI_CLK_PERIOD-1
)
(
input sys_rst_n, //系统复位
input sys_clk, //系统时钟
input [SPI_BITS-1:0] tx_data, //需要发送的数据
input tr_start, //启动传输
output reg [SPI_BITS-1:0] rx_data, //接收到的数据
output reg tr_done, //传输完成
output reg almost_tr_done, //传输即将完成
output tr_idle, //SPI空闲
output reg almost_tr_idle, //SPI即将空闲
input [SPI_CS_MAX-1:0] sel_cs, //片选设置
output spi_clk, //SPI时钟
output spi_mosi, //SPI MOSI
input spi_miso, //SPI MISO
output [SPI_CS_MAX-1:0] spi_cs //SPI片选
);
//SPI时钟周期,只能是偶数分频
localparam CLK_PERIOD = (SPI_CLK_PERIOD / 2 * 2);
//spi传输忙标志
reg tr_busy;
//SPI时钟周期计数器,按SPI时钟周期进行计数
reg [15:0] clk_period_count;
//传输bit计数
reg [7:0] bit_cnt;
//发送移位寄存器
reg [SPI_BITS-1:0] tx_shift_reg;
//接收移位寄存器
reg [SPI_BITS-1:0] rx_shift_reg;
//空闲标志
assign tr_idle = ~tr_busy;
//启动SPI传输
always @(posedge sys_clk) begin
if(!sys_rst_n)
tr_busy <= 1'b0;
else if((tr_start == 1'b1) && (tr_busy == 1'b0))
tr_busy <= 1'b1;
else if((tr_busy == 1'b1) && (bit_cnt == (SPI_BITS - 1)) && (clk_period_count == (CLK_PERIOD - 1)))
tr_busy <= 1'b0;
end
//SPI即将空闲
always @(posedge sys_clk) begin
if(!sys_rst_n)
almost_tr_idle <= 1'b1;
else if((tr_start == 1'b1) && (almost_tr_idle == 1'b1))
almost_tr_idle <= 1'b0;
else if((almost_tr_idle == 1'b0) && (bit_cnt == (SPI_BITS - 1)) && (clk_period_count == (CLK_PERIOD - 1 - ALMOST_IDLE_ADVANCE)))
almost_tr_idle <= 1'b1;
end
//按SPI时钟周期进行计数
always @(posedge sys_clk) begin
if(!sys_rst_n)
clk_period_count <= 0;
else if(tr_busy == 1'b1)
if(clk_period_count < (CLK_PERIOD - 1))
clk_period_count <= clk_period_count + 1;
else
clk_period_count <= 0;
else
clk_period_count <= 0;
end
//进行传输计数
always @(posedge sys_clk) begin
if(!sys_rst_n)
bit_cnt <= 0;
else if(tr_busy == 1'b1) begin
if(clk_period_count == (CLK_PERIOD - 1)) begin
if(bit_cnt < (SPI_BITS - 1))
bit_cnt <= bit_cnt + 1;
end
end
else
bit_cnt <= 0;
end
//输出接收到的数据,接收完最后1bit时输出
always @(posedge sys_clk) begin
if(!sys_rst_n) begin
rx_data <= 0;
tr_done <= 0;
end
else if((tr_busy == 1'b1) && (bit_cnt == (SPI_BITS - 1)) && (clk_period_count == (CLK_PERIOD - 1))) begin
rx_data <= rx_shift_reg;
tr_done <= 1;
end
else
tr_done <= 0;
end
//输出传输完成预告
always @(posedge sys_clk) begin
if(!sys_rst_n)
almost_tr_done <= 0;
else if((tr_busy == 1'b1) && (bit_cnt == (SPI_BITS - 1)) && (clk_period_count == (CLK_PERIOD - 1 - ALMOST_DONE_ADVANCE)))
almost_tr_done <= 1;
else
almost_tr_done <= 0;
end
generate
if(SPI_MODE == 0) begin
//输出SPI时钟,模式0
//时钟默认为低电平,工作时前半段为低电平,后半段为高电平
assign spi_clk = ((tr_busy == 1'b1) && (clk_period_count > (CLK_PERIOD / 2 - 1))) ? 1'b1 : 1'b0;
end
else if(SPI_MODE == 1) begin
//输出SPI时钟,模式1
//时钟默认为低电平,工作时前半段为高电平,后半段为低电平
assign spi_clk = ((tr_busy == 1'b1) && (clk_period_count <= (CLK_PERIOD / 2 - 1))) ? 1'b1 : 1'b0;
end
else if(SPI_MODE == 2) begin
//输出SPI时钟,模式2
//时钟默认为高电平,工作时前半段为高电平,后半段为低电平
assign spi_clk = ((tr_busy == 1'b1) && (clk_period_count > (CLK_PERIOD / 2 - 1))) ? 1'b0 : 1'b1;
end
else begin
//输出SPI时钟,模式3
//时钟默认为高电平,工作时前半段为高电平,后半段为低电平
assign spi_clk = ((tr_busy == 1'b1) && (clk_period_count <= (CLK_PERIOD / 2 - 1))) ? 1'b0 : 1'b1;
end
endgenerate
//启动时锁定数据,随后进行发送数据移位操作
always @(posedge sys_clk) begin
if(!sys_rst_n)
tx_shift_reg <= (1 << SPI_BITS) - 1;
else if((tr_start == 1'b1) && (tr_busy == 1'b0))
tx_shift_reg <= tx_data;
else if((tr_busy == 1'b1) && (bit_cnt < (SPI_BITS - 1)) && (clk_period_count == (CLK_PERIOD - 1)))
tx_shift_reg <= {tx_shift_reg[6:0], tx_shift_reg[7]};
end
//输出SPI MOSI
assign spi_mosi = tx_shift_reg[7];
//采样SPI MOSI
//在时钟周期的3/4处采样
always @(posedge sys_clk) begin
if(!sys_rst_n)
rx_shift_reg <= 0;
else if(tr_busy == 1'b1) begin
if(clk_period_count == (CLK_PERIOD - CLK_PERIOD / 4 - 1))
rx_shift_reg = {rx_shift_reg[6:0], spi_miso};
end
else
rx_shift_reg <= 0;
end
//输出片选信号
assign spi_cs = sel_cs;
endmodule
FLASH 驱动模块
module flash_driver #(
parameter SPI_CLK_PERIOD = 4,
parameter SPI_CS_DELAY = 500,
parameter DATA_REQ_ADVANCE = 1
)
(
input sys_rst_n,
input sys_clk,
input flash_start,
input [7:0] flash_cmd,
input [24:0] flash_addr,
input [8:0] wr_data_len,
input [7:0] wr_data,
output wr_data_req,
input [8:0] rd_data_len,
output [7:0] rd_data,
output rd_data_flag,
output reg [23:0] flash_id,
output reg flash_id_flag,
output reg [7:0] flash_sr_reg,
output reg flash_sr_reg_flag,
output flash_idle,
output spi_clk,
output spi_mosi,
input spi_miso,
output spi_cs
);
//状态机的状态
localparam IDLE_STATE = 8'h01; //空闲状态
localparam RDID_STATE = 8'h02; //读FLASH ID状态
localparam WREN_STATE = 8'h04; //写使能状态
localparam SSE_STATE = 8'h08; //子扇区擦除状态
localparam BE_STATE = 8'h10; //全擦除
localparam READ_STATE = 8'h20; //读状态
localparam PP_STATE = 8'h40; //写状态(页编程)
localparam RDSR_STATE = 8'h80; //读状态寄存器状态
//指令集
localparam RDID_CMD = 8'h9f; //读ID指令
localparam WREN_CMD = 8'h06; //写使能指令
localparam SSE_CMD = 8'h20; //子扇区擦除指令
localparam BE_CMD = 8'hc7; //全擦除指令
localparam READ_CMD = 8'h0b; //读指令
localparam PP_CMD = 8'h02; //写指令(页编程)
localparam RDSR_CMD = 8'h05; //读状态寄存器指令
//传输计数
reg [15:0] tx_count;
reg [15:0] rx_count;
//当前状态
reg [7:0] current_state;
//下一刻的状态
reg [7:0] next_state;
//当前状态结束标志,切换到下一个状态
reg state_done;
//片选前延时
reg [16:0] cs_front_delay_count;
//片选后延时
reg [16:0] cs_back_delay_count;
//指令操作延时,部分命令发送完成后需要延时
reg [16:0] cmd_back_ddelay_count;
//SPI需要发送的数据
reg [7:0] spi_tx_data;
//启动SPI发送
reg spi_tr_start;
//SPI片选控制
reg spi_ctrl_cs;
//SPI接收到的数据
wire [7:0] spi_rx_data;
//SPI传输完成
wire spi_tr_done;
//SPI即将传输完成
wire spi_almost_tr_done;
//SPI空闲
wire spi_tr_idle;
//SPI即将空闲
wire spi_almost_tr_idle;
//状态跳转
always @(posedge sys_clk)begin
if(!sys_rst_n)
current_state <= IDLE_STATE;
else
current_state <= next_state;
end
//根据当前状态确定下一刻状态
always @(*)begin
case(current_state)
IDLE_STATE: begin
if((state_done == 1'b0) && (flash_start == 1'b1) && (flash_cmd == RDID_CMD))
next_state = RDID_STATE;
else if((state_done == 1'b0) && (flash_start == 1'b1) && (flash_cmd == WREN_CMD))
next_state = WREN_STATE;
else if((state_done == 1'b0) && (flash_start == 1'b1) && (flash_cmd == SSE_CMD))
next_state = SSE_STATE;
else if((state_done == 1'b0) && (flash_start == 1'b1) && (flash_cmd == BE_CMD))
next_state = BE_STATE;
else if((state_done == 1'b0) && (flash_start == 1'b1) && (flash_cmd == READ_CMD))
next_state = READ_STATE;
else if((state_done == 1'b0) && (flash_start == 1'b1) && (flash_cmd == PP_CMD))
next_state = PP_STATE;
else if((state_done == 1'b0) && (flash_start == 1'b1) && (flash_cmd == RDSR_CMD))
next_state = RDSR_STATE;
else
next_state = IDLE_STATE;
end
RDID_STATE: begin
if(state_done == 1'b1)
next_state = IDLE_STATE;
else
next_state = RDID_STATE;
end
WREN_STATE: begin
if(state_done == 1'b1)
next_state = IDLE_STATE;
else
next_state = WREN_STATE;
end
SSE_STATE: begin
if(state_done == 1'b1)
next_state = IDLE_STATE;
else
next_state = SSE_STATE;
end
BE_STATE: begin
if(state_done == 1'b1)
next_state = IDLE_STATE;
else
next_state = BE_STATE;
end
READ_STATE: begin
if(state_done == 1'b1)
next_state = IDLE_STATE;
else
next_state = READ_STATE;
end
PP_STATE: begin
if(state_done == 1'b1)
next_state = IDLE_STATE;
else
next_state = PP_STATE;
end
RDSR_STATE: begin
if(state_done == 1'b1)
next_state = IDLE_STATE;
else
next_state = RDSR_STATE;
end
default:
next_state = IDLE_STATE;
endcase
end
//空闲标志输出
assign flash_idle = ((current_state == IDLE_STATE) && (state_done == 1'b0)) ? 1'b1 : 1'b0;
//进行计数器计数,输出延时信号
always @(posedge sys_clk) begin
if(!sys_rst_n) begin
cs_front_delay_count <= 0;
cs_back_delay_count <= 0;
cmd_back_ddelay_count <= 0;
state_done <= 1'b0;
end
else begin
case(current_state)
IDLE_STATE: begin
cs_front_delay_count <= 0;
cs_back_delay_count <= 0;
cmd_back_ddelay_count <= 0;
state_done <= 1'b0;
end
RDID_STATE: begin
//片选拉低后延时计数
if(cs_front_delay_count < (SPI_CS_DELAY - 1))
cs_front_delay_count <= cs_front_delay_count + 1;
//片选拉高前延时计数
if(rx_count >= 4) begin
if(cs_back_delay_count < (SPI_CS_DELAY - 1))
cs_back_delay_count <= cs_back_delay_count + 1;
end
//指令操作延时
if(cs_back_delay_count >= (SPI_CS_DELAY - 1)) begin
if(cmd_back_ddelay_count < (500 - 1))
cmd_back_ddelay_count <= cmd_back_ddelay_count + 1;
end
//状态结束判断
if(cmd_back_ddelay_count >= (500 - 1))
state_done <= 1'b1;
end
WREN_STATE: begin
//片选拉低后延时计数
if(cs_front_delay_count < (SPI_CS_DELAY - 1))
cs_front_delay_count <= cs_front_delay_count + 1;
//片选拉高前延时计数
if(rx_count >= 1) begin
if(cs_back_delay_count < (SPI_CS_DELAY - 1))
cs_back_delay_count <= cs_back_delay_count + 1;
end
//指令操作延时
if(cs_back_delay_count >= (SPI_CS_DELAY - 1)) begin
if(cmd_back_ddelay_count < (500 - 1))
cmd_back_ddelay_count <= cmd_back_ddelay_count + 1;
end
//状态结束判断
if(cmd_back_ddelay_count >= (500 - 1))
state_done <= 1'b1;
end
SSE_STATE: begin
//片选拉低后延时计数
if(cs_front_delay_count < (SPI_CS_DELAY - 1))
cs_front_delay_count <= cs_front_delay_count + 1;
//片选拉高前延时计数
if(rx_count >= 4) begin
if(cs_back_delay_count < (SPI_CS_DELAY - 1))
cs_back_delay_count <= cs_back_delay_count + 1;
end
//指令操作延时
if(cs_back_delay_count >= (SPI_CS_DELAY - 1)) begin
if(cmd_back_ddelay_count < (500 - 1))
cmd_back_ddelay_count <= cmd_back_ddelay_count + 1;
end
//状态结束判断
if(cmd_back_ddelay_count >= (500 - 1))
state_done <= 1'b1;
end
BE_STATE: begin
//片选拉低后延时计数
if(cs_front_delay_count < (SPI_CS_DELAY - 1))
cs_front_delay_count <= cs_front_delay_count + 1;
//片选拉高前延时计数
if(rx_count >= 1) begin
if(cs_back_delay_count < (SPI_CS_DELAY - 1))
cs_back_delay_count <= cs_back_delay_count + 1;
end
//指令操作延时
if(cs_back_delay_count >= (SPI_CS_DELAY - 1)) begin
if(cmd_back_ddelay_count < (500 - 1))
cmd_back_ddelay_count <= cmd_back_ddelay_count + 1;
end
//状态结束判断
if(cmd_back_ddelay_count >= (500 - 1))
state_done <= 1'b1;
end
READ_STATE: begin
//片选拉低后延时计数
if(cs_front_delay_count < (SPI_CS_DELAY - 1))
cs_front_delay_count <= cs_front_delay_count + 1;
//片选拉高前延时计数
if(rx_count >= (4 + rd_data_len)) begin
if(cs_back_delay_count < (SPI_CS_DELAY - 1))
cs_back_delay_count <= cs_back_delay_count + 1;
end
//指令操作延时
if(cs_back_delay_count >= (SPI_CS_DELAY - 1)) begin
if(cmd_back_ddelay_count < (500 - 1))
cmd_back_ddelay_count <= cmd_back_ddelay_count + 1;
end
//状态结束判断
if(cmd_back_ddelay_count >= (500 - 1))
state_done <= 1'b1;
end
PP_STATE: begin
//片选拉低后延时计数
if(cs_front_delay_count < (SPI_CS_DELAY - 1))
cs_front_delay_count <= cs_front_delay_count + 1;
//片选拉高前延时计数
if(rx_count >= (4 + wr_data_len)) begin
if(cs_back_delay_count < (SPI_CS_DELAY - 1))
cs_back_delay_count <= cs_back_delay_count + 1;
end
//指令操作延时
if(cs_back_delay_count >= (SPI_CS_DELAY - 1)) begin
if(cmd_back_ddelay_count < (500 - 1))
cmd_back_ddelay_count <= cmd_back_ddelay_count + 1;
end
//状态结束判断
if(cmd_back_ddelay_count >= (500 - 1))
state_done <= 1'b1;
end
RDSR_STATE: begin
//片选拉低后延时计数
if(cs_front_delay_count < (SPI_CS_DELAY - 1))
cs_front_delay_count <= cs_front_delay_count + 1;
//片选拉高前延时计数
if(rx_count >= 2) begin
if(cs_back_delay_count < (SPI_CS_DELAY - 1))
cs_back_delay_count <= cs_back_delay_count + 1;
end
//指令操作延时
if(cs_back_delay_count >= (SPI_CS_DELAY - 1)) begin
if(cmd_back_ddelay_count < (500 - 1))
cmd_back_ddelay_count <= cmd_back_ddelay_count + 1;
end
//状态结束判断
if(cmd_back_ddelay_count >= (500 - 1))
state_done <= 1'b1;
end
default: begin
cs_front_delay_count <= 0;
cs_back_delay_count <= 0;
cmd_back_ddelay_count <= 0;
state_done <= 1'b0;
end
endcase
end
end
//控制SPI传输
always @(posedge sys_clk)begin
if(!sys_rst_n) begin
spi_ctrl_cs <= 1'b1;
spi_tx_data <= 8'b0;
spi_tr_start <= 1'b0;
tx_count <= 16'b0;
end
else begin
case(current_state)
IDLE_STATE: begin
spi_ctrl_cs <= 1'b1;
spi_tx_data <= 8'b0;
spi_tr_start <= 1'b0;
tx_count <= 16'b0;
end
RDID_STATE: begin
//控制片选
if(cs_back_delay_count >= (SPI_CS_DELAY - 1))
spi_ctrl_cs <= 1'b1;
else
spi_ctrl_cs <= 1'b0;
//控制传输
if(cs_front_delay_count >= (SPI_CS_DELAY - 1)) begin
if((spi_almost_tr_idle == 1'b1) && (spi_tr_start == 1'b0)) begin
//启动spi传输
if(tx_count == 0) begin
spi_tx_data <= 8'h9f;
spi_tr_start <= 1'b1;
end
else if(tx_count < 4) begin
spi_tx_data <= 8'hFF;
spi_tr_start <= 1'b1;
end
//发送计数
if(tx_count < 4)
tx_count <= tx_count + 16'b1;
end
else if(spi_almost_tr_idle == 1'b0)
spi_tr_start <= 1'b0;
end
else
spi_tr_start <= 1'b0;
end
WREN_STATE: begin
//控制片选
if(cs_back_delay_count >= (SPI_CS_DELAY - 1))
spi_ctrl_cs <= 1'b1;
else
spi_ctrl_cs <= 1'b0;
//控制传输
if(cs_front_delay_count >= (SPI_CS_DELAY - 1)) begin
if((spi_almost_tr_idle == 1'b1) && (spi_tr_start == 1'b0)) begin
//启动spi传输
if(tx_count == 0) begin
spi_tx_data <= 8'h06;
spi_tr_start <= 1'b1;
end
//发送计数
if(tx_count < 1)
tx_count <= tx_count + 16'b1;
end
else if(spi_almost_tr_idle == 1'b0)
spi_tr_start <= 1'b0;
end
else
spi_tr_start <= 1'b0;
end
SSE_STATE: begin
//控制片选
if(cs_back_delay_count >= (SPI_CS_DELAY - 1))
spi_ctrl_cs <= 1'b1;
else
spi_ctrl_cs <= 1'b0;
//控制传输
if(cs_front_delay_count >= (SPI_CS_DELAY - 1)) begin
if((spi_almost_tr_idle == 1'b1) && (spi_tr_start == 1'b0)) begin
//启动spi传输
if(tx_count == 0) begin
spi_tx_data <= 8'h20;
spi_tr_start <= 1'b1;
end
else if(tx_count == 1) begin
spi_tx_data <= flash_addr[23:16];
spi_tr_start <= 1'b1;
end
else if(tx_count == 2) begin
spi_tx_data <= flash_addr[15:8];
spi_tr_start <= 1'b1;
end
else if(tx_count == 3) begin
spi_tx_data <= flash_addr[7:0];
spi_tr_start <= 1'b1;
end
//发送计数
if(tx_count < 4)
tx_count <= tx_count + 16'b1;
end
else if(spi_almost_tr_idle == 1'b0)
spi_tr_start <= 1'b0;
end
else
spi_tr_start <= 1'b0;
end
BE_STATE: begin
//控制片选
if(cs_back_delay_count >= (SPI_CS_DELAY - 1))
spi_ctrl_cs <= 1'b1;
else
spi_ctrl_cs <= 1'b0;
//控制传输
if(cs_front_delay_count >= (SPI_CS_DELAY - 1)) begin
if((spi_almost_tr_idle == 1'b1) && (spi_tr_start == 1'b0)) begin
//启动spi传输
if(tx_count == 0) begin
spi_tx_data <= 8'hc7;
spi_tr_start <= 1'b1;
end
//发送计数
if(tx_count < 1)
tx_count <= tx_count + 16'b1;
end
else if(spi_almost_tr_idle == 1'b0)
spi_tr_start <= 1'b0;
end
else
spi_tr_start <= 1'b0;
end
READ_STATE: begin
//控制片选
if(cs_back_delay_count >= (SPI_CS_DELAY - 1))
spi_ctrl_cs <= 1'b1;
else
spi_ctrl_cs <= 1'b0;
//控制传输
if(cs_front_delay_count >= (SPI_CS_DELAY - 1)) begin
if((spi_almost_tr_idle == 1'b1) && (spi_tr_start == 1'b0)) begin
//启动spi传输
if(tx_count == 0) begin
spi_tx_data <= 8'h03;
spi_tr_start <= 1'b1;
end
else if(tx_count == 1) begin
spi_tx_data <= flash_addr[23:16];
spi_tr_start <= 1'b1;
end
else if(tx_count == 2) begin
spi_tx_data <= flash_addr[15:8];
spi_tr_start <= 1'b1;
end
else if(tx_count == 3) begin
spi_tx_data <= flash_addr[7:0];
spi_tr_start <= 1'b1;
end
else if(tx_count < (4 + rd_data_len)) begin
spi_tx_data <= 8'hFF;
spi_tr_start <= 1'b1;
end
//发送计数
if(tx_count < (4 + rd_data_len))
tx_count <= tx_count + 16'b1;
end
else if(spi_almost_tr_idle == 1'b0)
spi_tr_start <= 1'b0;
end
else
spi_tr_start <= 1'b0;
end
PP_STATE: begin
//控制片选
if(cs_back_delay_count >= (SPI_CS_DELAY - 1))
spi_ctrl_cs <= 1'b1;
else
spi_ctrl_cs <= 1'b0;
//控制传输
if(cs_front_delay_count >= (SPI_CS_DELAY - 1)) begin
if((spi_almost_tr_idle == 1'b1) && (spi_tr_start == 1'b0)) begin
//启动spi传输
if(tx_count == 0) begin
spi_tx_data <= 8'h02;
spi_tr_start <= 1'b1;
end
else if(tx_count == 1) begin
spi_tx_data <= flash_addr[23:16];
spi_tr_start <= 1'b1;
end
else if(tx_count == 2) begin
spi_tx_data <= flash_addr[15:8];
spi_tr_start <= 1'b1;
end
else if(tx_count == 3) begin
spi_tx_data <= flash_addr[7:0];
spi_tr_start <= 1'b1;
end
else if(tx_count < (4 + wr_data_len)) begin
spi_tx_data <= wr_data;
spi_tr_start <= 1'b1;
end
//发送计数
if(tx_count < (4 + wr_data_len))
tx_count <= tx_count + 16'b1;
end
else if(spi_almost_tr_idle == 1'b0)
spi_tr_start <= 1'b0;
end
end
RDSR_STATE: begin
//控制片选
if(cs_back_delay_count >= (SPI_CS_DELAY - 1))
spi_ctrl_cs <= 1'b1;
else
spi_ctrl_cs <= 1'b0;
//控制传输
if(cs_front_delay_count >= (SPI_CS_DELAY - 1)) begin
if((spi_almost_tr_idle == 1'b1) && (spi_tr_start == 1'b0)) begin
//启动spi传输
if(tx_count == 0) begin
spi_tx_data <= 8'h05;
spi_tr_start <= 1'b1;
end
else if(tx_count < 2) begin
spi_tx_data <= 8'hFF;
spi_tr_start <= 1'b1;
end
//发送计数
if(tx_count < 2)
tx_count <= tx_count + 16'b1;
end
else if(spi_almost_tr_idle == 1'b0)
spi_tr_start <= 1'b0;
end
else
spi_tr_start <= 1'b0;
end
default: begin
spi_ctrl_cs <= 1'b1;
spi_tx_data <= 8'b0;
spi_tr_start <= 1'b0;
end
endcase
end
end
//处理读取ID和状态寄存器
always @(posedge sys_clk)begin
if(!sys_rst_n) begin
flash_id <= 24'b0;
flash_id_flag <= 1'b0;
flash_sr_reg <= 8'b0;
flash_sr_reg_flag <= 1'b0;
end
else begin
case(current_state)
RDID_STATE: begin
if(spi_tr_done == 1'b1) begin
if(rx_count == 1)
flash_id[23:16] <= spi_rx_data;
else if(rx_count == 2)
flash_id[15:8] <= spi_rx_data;
else if(rx_count == 3)
flash_id[7:0] <= spi_rx_data;
if(rx_count == 3)
flash_id_flag <= 1'b1;
else
flash_id_flag <= 1'b0;
end
else
flash_id_flag <= 1'b0;
end
RDSR_STATE: begin
if(spi_tr_done == 1'b1) begin
if(rx_count == 1)
flash_sr_reg <= spi_rx_data;
if(rx_count == 1)
flash_sr_reg_flag <= 1'b1;
else
flash_sr_reg_flag <= 1'b0;
end
else
flash_sr_reg_flag <= 1'b0;
end
default: begin
flash_id_flag <= 1'b0;
flash_sr_reg_flag <= 1'b0;
end
endcase
end
end
//SPI控制器接收计数
always @(posedge sys_clk)begin
if(!sys_rst_n)
rx_count <= 0;
else if((current_state != IDLE_STATE) && (spi_tr_done == 1'b1))
rx_count <= rx_count + 1;
else if(current_state == IDLE_STATE)
rx_count <= 0;
end
//flash数据输出
assign rd_data = ((current_state == READ_STATE) &&(rx_count >= 4)) ? spi_rx_data : 0'b0;
assign rd_data_flag = ((current_state == READ_STATE) &&(rx_count >= 4)) ? spi_tr_done : 0'b0;
//数据请求输出
assign wr_data_req = ((current_state == PP_STATE) &&(tx_count >= 4) && (tx_count < (4 + wr_data_len))) ? spi_almost_tr_done : 0'b0;
spi_driver #(
.SPI_CS_MAX(1),
.SPI_BITS(8),
.SPI_CLK_PERIOD(4),
.SPI_MODE(0),
//因为将外部数据转发到spi_driver需要一个时钟,所以这里加1个时钟周期
.ALMOST_DONE_ADVANCE(DATA_REQ_ADVANCE + 1),
//此模块准备数据需要一个时钟周期,所以为1
.ALMOST_IDLE_ADVANCE(1)
)
spi_driver_inst0(
.sys_rst_n(sys_rst_n),
.sys_clk(sys_clk),
.tx_data(spi_tx_data),
.tr_start(spi_tr_start),
.rx_data(spi_rx_data),
.tr_done(spi_tr_done),
.almost_tr_done(spi_almost_tr_done),
.tr_idle(spi_tr_idle),
.almost_tr_idle(spi_almost_tr_idle),
.sel_cs(spi_ctrl_cs),
.spi_clk(spi_clk),
.spi_mosi(spi_mosi),
.spi_miso(spi_miso),
.spi_cs(spi_cs)
);
endmodule
FLASH 读写测试模块
module spi_flash_rw_test #(
parameter ALARM_LED_PERIOD = 25'd25_000_000
)
(
input sys_rst_n,
input sys_clk,
output spi_mosi,
input spi_miso,
output spi_sclk,
output spi_cs,
output reg alarm_led
);
//flash指令集
localparam RDID_CMD = 8'h9f; //读ID指令
localparam WREN_CMD = 8'h06; //写使能指令
localparam SSE_CMD = 8'h20; //子扇区擦除指令
localparam BE_CMD = 8'hc7; //全擦除指令
localparam READ_CMD = 8'h0b; //读指令
localparam PP_CMD = 8'h02; //写指令(页编程)
localparam RDSR_CMD = 8'h05; //读状态寄存器指令
//状态机的状态
localparam IDLE_STATE = 16'h0001; //空闲状态
localparam RDID_STATE = 16'h0002; //读FLASH ID状态
localparam BE_WREN_STATE = 16'h0004; //全擦除前写使能状态
localparam BE_STATE = 16'h0008; //全擦除状态
localparam BE_WAIT_STATE = 16'h0010; //全擦除后等待flash空闲状态
localparam PP_WREN_STATE = 16'h0020; //页编程前写使能状态
localparam PP_STATE = 16'h0040; //写状态(页编程)
localparam PP_WAIT_STATE = 16'h0080; //页编程后等待flash空闲状态
localparam READ1_STATE = 16'h0100; //第一次读状态,验证写入数据是否成功
localparam SSE_WREN_STATE = 16'h0200; //子扇区擦除前写使能状态
localparam SSE_STATE = 16'h0400; //子扇区擦除状态
localparam SSE_WAIT_STATE = 16'h0800; //子扇区擦除后等待flash空闲状态
localparam READ2_STATE = 16'h1000; //第二次读状态,验证擦除是否成功
//错误指示
reg error_flag;
//警示LED闪烁计数器
reg [31:0] led_count;
//flash擦除或写入忙标志
reg flash_ew_busy;
//写入计数
reg [8:0] write_count;
//读取计数
reg [8:0] read_count;
//当前状态
reg [15:0] current_state;
//下一刻的状态
reg [15:0] next_state;
//对应状态结束标志,应切换到下一个状态,一个bit对应一个状态
reg [15:0] state_done;
//状态启动标志
reg [15:0] state_start;
//flash操作开始信号
reg flash_start;
//flash操作命令
reg [7:0] flash_cmd;
//flash操作地址
reg [24:0] flash_addr;
//flash写入长度
reg [8:0] wr_data_len;
//写入flash的数据,需要在收到wr_data_req后更新
reg [7:0] wr_data;
//flash写入数据请求
wire wr_data_req;
//flash读长度
reg [8:0]rd_data_len;
//flash中读取到的数据
wire [7:0] rd_data;
//flash读取数据有效标志
wire rd_data_flag;
//flash ID
wire [23:0] flash_id;
//flash ID有效标志
wire flash_id_flag;
//flash 状态寄存器0
wire [7:0] flash_sr_reg;
//flash 状态寄存器0有效标志
wire flash_sr_reg_flag;
//flash空闲标志
wire flash_driver_idle;
//根据错误标志控制led闪烁或常亮
//操作未完成熄灭
//操作完成常亮
//发生错误时闪烁
always @(posedge sys_clk) begin
if(!sys_rst_n) begin
alarm_led <= 1'b0;
led_count <= 32'b0;
end
else if(error_flag == 1'b1) begin
if(led_count >= (ALARM_LED_PERIOD - 1)) begin
alarm_led <= ~alarm_led;
led_count <= 32'b0;
end
else
led_count <= led_count + 32'b1;
end
else if((current_state == IDLE_STATE) && (state_done != 16'h0)) begin
alarm_led <= 1'b1;
led_count <= 32'b0;
end
else begin
alarm_led <= 1'b0;
led_count <= 32'b0;
end
end
//状态跳转
always @(posedge sys_clk)begin
if(!sys_rst_n)
current_state <= IDLE_STATE;
else
current_state <= next_state;
end
//根据当前状态确定下一刻状态
always @(*)begin
case(current_state)
IDLE_STATE: begin
if((state_done == 16'h0) && (error_flag == 1'b0))
next_state = RDID_STATE;
else
next_state = IDLE_STATE;
end
RDID_STATE: begin
if(error_flag == 1'b1)
next_state = IDLE_STATE;
else if(state_done & RDID_STATE)
next_state = BE_WREN_STATE;
else
next_state = RDID_STATE;
end
BE_WREN_STATE: begin
if(error_flag == 1'b1)
next_state = IDLE_STATE;
else if(state_done & BE_WREN_STATE)
next_state = BE_STATE;
else
next_state = BE_WREN_STATE;
end
BE_STATE: begin
if(error_flag == 1'b1)
next_state = IDLE_STATE;
else if(state_done & BE_STATE)
next_state = BE_WAIT_STATE;
else
next_state = BE_STATE;
end
BE_WAIT_STATE: begin
if(error_flag == 1'b1)
next_state = IDLE_STATE;
else if(state_done & BE_WAIT_STATE)
next_state = PP_WREN_STATE;
else
next_state = BE_WAIT_STATE;
end
PP_WREN_STATE: begin
if(error_flag == 1'b1)
next_state = IDLE_STATE;
else if(state_done & PP_WREN_STATE)
next_state = PP_STATE;
else
next_state = PP_WREN_STATE;
end
PP_STATE: begin
if(error_flag == 1'b1)
next_state = IDLE_STATE;
else if(state_done & PP_STATE)
next_state = PP_WAIT_STATE;
else
next_state = PP_STATE;
end
PP_WAIT_STATE: begin
if(error_flag == 1'b1)
next_state = IDLE_STATE;
else if(state_done & PP_WAIT_STATE)
next_state = READ1_STATE;
else
next_state = PP_WAIT_STATE;
end
READ1_STATE: begin
if(error_flag == 1'b1)
next_state = IDLE_STATE;
else if(state_done & READ1_STATE)
next_state = SSE_WREN_STATE;
else
next_state = READ1_STATE;
end
SSE_WREN_STATE: begin
if(error_flag == 1'b1)
next_state = IDLE_STATE;
else if(state_done & SSE_WREN_STATE)
next_state = SSE_STATE;
else
next_state = SSE_WREN_STATE;
end
SSE_STATE: begin
if(error_flag == 1'b1)
next_state = IDLE_STATE;
else if(state_done & SSE_STATE)
next_state = SSE_WAIT_STATE;
else
next_state = SSE_STATE;
end
SSE_WAIT_STATE: begin
if(error_flag == 1'b1)
next_state = IDLE_STATE;
else if(state_done & SSE_WAIT_STATE)
next_state = READ2_STATE;
else
next_state = SSE_WAIT_STATE;
end
READ2_STATE: begin
if(error_flag == 1'b1)
next_state = IDLE_STATE;
else if(state_done & READ2_STATE)
next_state = IDLE_STATE;
else
next_state = READ2_STATE;
end
default:
next_state = IDLE_STATE;
endcase
end
//控制flash擦除、读写等
always @(posedge sys_clk)begin
if(!sys_rst_n) begin
flash_start <= 1'b0;
flash_cmd <= 8'h0;
flash_addr <= 24'h0;
wr_data_len <= 9'h0;
rd_data_len <= 9'h0;
state_done <= 16'h0;
state_start <= 16'h0;
end
else begin
case(current_state)
RDID_STATE: begin
//启动读ID操作
if((flash_driver_idle == 1'b1) && (!(state_start & RDID_STATE)) && (flash_start == 1'b0)) begin
flash_start <= 1'b1;
flash_cmd <= RDID_CMD;
state_start <= state_start | RDID_STATE;
end
//读ID操作完成
if((flash_driver_idle == 1'b1) && (state_start & RDID_STATE) && (flash_start == 1'b0)) begin
if(!(state_done & RDID_STATE))
state_done <= state_done | RDID_STATE;
end
//flash操作已经启动,复位启动标志
if((flash_driver_idle == 1'b0) && (flash_start == 1'b1))
flash_start <= 1'b0;
end
BE_WREN_STATE: begin
//启动写使能操作
if((flash_driver_idle == 1'b1) && (!(state_start & BE_WREN_STATE)) && (flash_start == 1'b0)) begin
flash_start <= 1'b1;
flash_cmd <= WREN_CMD;
state_start <= state_start | BE_WREN_STATE;
end
//写使能操作完成
if((flash_driver_idle == 1'b1) && (state_start & BE_WREN_STATE) && (flash_start == 1'b0)) begin
if(!(state_done & BE_WREN_STATE))
state_done <= state_done | BE_WREN_STATE;
end
//flash操作已经启动,复位启动标志
if((flash_driver_idle == 1'b0) && (flash_start == 1'b1))
flash_start <= 1'b0;
end
BE_STATE: begin
//启动全擦除操作
if((flash_driver_idle == 1'b1) && (!(state_start & BE_STATE)) && (flash_start == 1'b0)) begin
flash_start <= 1'b1;
flash_cmd <= BE_CMD;
state_start <= state_start | BE_STATE;
end
//全擦除操作完成
if((flash_driver_idle == 1'b1) && (state_start & BE_STATE) && (flash_start == 1'b0)) begin
if(!(state_done & BE_STATE))
state_done <= state_done | BE_STATE;
end
//flash操作已经启动,复位启动标志
if((flash_driver_idle == 1'b0) && (flash_start == 1'b1))
flash_start <= 1'b0;
end
BE_WAIT_STATE: begin
//启动读状态寄存器操作
if((flash_driver_idle == 1'b1) && (!(state_start & BE_WAIT_STATE)) && (flash_start == 1'b0)) begin
flash_start <= 1'b1;
flash_cmd <= RDSR_CMD;
state_start <= state_start | BE_WAIT_STATE;
end
//读状态寄存器操作完成
if((flash_driver_idle == 1'b1) && (state_start & BE_WAIT_STATE) && (flash_start == 1'b0)) begin
//检查擦除是否结束,若未结束则再次轮询状态寄存器
if(flash_ew_busy == 1'b1)
state_start <= state_start & ~BE_WAIT_STATE;
else if(!(state_done & BE_WAIT_STATE))
state_done <= state_done | BE_WAIT_STATE;
end
//flash操作已经启动,复位启动标志
if((flash_driver_idle == 1'b0) && (flash_start == 1'b1))
flash_start <= 1'b0;
end
PP_WREN_STATE: begin
//启动写使能操作
if((flash_driver_idle == 1'b1) && (!(state_start & PP_WREN_STATE)) && (flash_start == 1'b0)) begin
flash_start <= 1'b1;
flash_cmd <= WREN_CMD;
state_start <= state_start | PP_WREN_STATE;
end
//写使能操作完成
if((flash_driver_idle == 1'b1) && (state_start & PP_WREN_STATE) && (flash_start == 1'b0)) begin
if(!(state_done & PP_WREN_STATE))
state_done <= state_done | PP_WREN_STATE;
end
//flash操作已经启动,复位启动标志
if((flash_driver_idle == 1'b0) && (flash_start == 1'b1))
flash_start <= 1'b0;
end
PP_STATE: begin
//启动写flash操作
if((flash_driver_idle == 1'b1) && (!(state_start & PP_STATE)) && (flash_start == 1'b0)) begin
flash_start <= 1'b1;
flash_cmd <= PP_CMD;
flash_addr <= 24'h1000;
wr_data_len <= 9'd256;
state_start <= state_start | PP_STATE;
end
//写操作完成
if((flash_driver_idle == 1'b1) && (state_start & PP_STATE) && (flash_start == 1'b0)) begin
if(!(state_done & PP_STATE))
state_done <= state_done | PP_STATE;
end
//flash操作已经启动,复位启动标志
if((flash_driver_idle == 1'b0) && (flash_start == 1'b1))
flash_start <= 1'b0;
end
PP_WAIT_STATE: begin
//启动读状态寄存器操作
if((flash_driver_idle == 1'b1) && (!(state_start & PP_WAIT_STATE)) && (flash_start == 1'b0)) begin
flash_start <= 1'b1;
flash_cmd <= RDSR_CMD;
state_start <= state_start | PP_WAIT_STATE;
end
//读状态寄存器操作完成
if((flash_driver_idle == 1'b1) && (state_start & PP_WAIT_STATE) && (flash_start == 1'b0)) begin
//检查擦除是否结束,若未结束则再次轮询状态寄存器
if(flash_ew_busy == 1'b1)
state_start <= state_start & ~PP_WAIT_STATE;
else if(!(state_done & PP_WAIT_STATE))
state_done <= state_done | PP_WAIT_STATE;
end
//flash操作已经启动,复位启动标志
if((flash_driver_idle == 1'b0) && (flash_start == 1'b1))
flash_start <= 1'b0;
end
READ1_STATE: begin
//启动读flash操作
if((flash_driver_idle == 1'b1) && (!(state_start & READ1_STATE)) && (flash_start == 1'b0)) begin
flash_start <= 1'b1;
flash_cmd <= READ_CMD;
flash_addr <= 24'h1000;
rd_data_len <= 9'd256;
state_start <= state_start | READ1_STATE;
end
//读操作完成
if((flash_driver_idle == 1'b1) && (state_start & READ1_STATE) && (flash_start == 1'b0)) begin
if(!(state_done & READ1_STATE))
state_done <= state_done | READ1_STATE;
end
//flash操作已经启动,复位启动标志
if((flash_driver_idle == 1'b0) && (flash_start == 1'b1))
flash_start <= 1'b0;
end
SSE_WREN_STATE: begin
//启动写使能操作
if((flash_driver_idle == 1'b1) && (!(state_start & SSE_WREN_STATE)) && (flash_start == 1'b0)) begin
flash_start <= 1'b1;
flash_cmd <= WREN_CMD;
state_start <= state_start | SSE_WREN_STATE;
end
//写使能操作完成
if((flash_driver_idle == 1'b1) && (state_start & SSE_WREN_STATE) && (flash_start == 1'b0)) begin
if(!(state_done & SSE_WREN_STATE))
state_done <= state_done | SSE_WREN_STATE;
end
//flash操作已经启动,复位启动标志
if((flash_driver_idle == 1'b0) && (flash_start == 1'b1))
flash_start <= 1'b0;
end
SSE_STATE: begin
//启动子扇区擦除操作
if((flash_driver_idle == 1'b1) && (!(state_start & SSE_STATE)) && (flash_start == 1'b0)) begin
flash_start <= 1'b1;
flash_cmd <= SSE_CMD;
flash_addr <= 24'h1000;
state_start <= state_start | SSE_STATE;
end
//子扇区擦除操作完成
if((flash_driver_idle == 1'b1) && (state_start & SSE_STATE) && (flash_start == 1'b0)) begin
if(!(state_done & SSE_STATE))
state_done <= state_done | SSE_STATE;
end
//flash操作已经启动,复位启动标志
if((flash_driver_idle == 1'b0) && (flash_start == 1'b1))
flash_start <= 1'b0;
end
SSE_WAIT_STATE: begin
//启动读状态寄存器操作
if((flash_driver_idle == 1'b1) && (!(state_start & SSE_WAIT_STATE)) && (flash_start == 1'b0)) begin
flash_start <= 1'b1;
flash_cmd <= RDSR_CMD;
state_start <= state_start | SSE_WAIT_STATE;
end
//读状态寄存器操作完成
if((flash_driver_idle == 1'b1) && (state_start & SSE_WAIT_STATE) && (flash_start == 1'b0)) begin
//检查擦除是否结束,若未结束则再次轮询状态寄存器
if(flash_ew_busy == 1'b1)
state_start <= state_start & ~SSE_WAIT_STATE;
else if(!(state_done & SSE_WAIT_STATE))
state_done <= state_done | SSE_WAIT_STATE;
end
//flash操作已经启动,复位启动标志
if((flash_driver_idle == 1'b0) && (flash_start == 1'b1))
flash_start <= 1'b0;
end
READ2_STATE: begin
//启动读flash操作
if((flash_driver_idle == 1'b1) && (!(state_start & READ2_STATE)) && (flash_start == 1'b0)) begin
flash_start <= 1'b1;
flash_cmd <= READ_CMD;
flash_addr <= 24'h1000;
rd_data_len <= 9'd256;
state_start <= state_start | READ2_STATE;
end
//读操作完成
if((flash_driver_idle == 1'b1) && (state_start & READ2_STATE) && (flash_start == 1'b0)) begin
if(!(state_done & READ2_STATE))
state_done <= state_done | READ2_STATE;
end
//flash操作已经启动,复位启动标志
if((flash_driver_idle == 1'b0) && (flash_start == 1'b1))
flash_start <= 1'b0;
end
default: begin
flash_start <= 1'b0;
flash_cmd <= 8'h0;
flash_addr <= 24'h0;
end
endcase
end
end
//处理flash driver返回的数据,包括ID、读取数据、状态寄存器
always @(posedge sys_clk)begin
if(!sys_rst_n) begin
error_flag <= 1'b0;
flash_ew_busy <= 1'h0;
read_count <= 9'h0;
end
else begin
case(current_state)
RDID_STATE: begin
//检查ID是否正确
if(flash_id_flag == 1'b1) begin
if(flash_id != 24'hef4018)
error_flag <= 1'b1;
end
end
BE_WAIT_STATE: begin
//检查擦除是否完成
if(flash_sr_reg_flag == 1'b1)
flash_ew_busy <= flash_sr_reg[0];
end
PP_WAIT_STATE: begin
//检查写是否完成
if(flash_sr_reg_flag == 1'b1)
flash_ew_busy <= flash_sr_reg[0];
end
READ1_STATE: begin
if(rd_data_flag == 1'b1) begin
//检查接收的数据
if(rd_data != read_count[7:0])
error_flag <= 1'b1;
//接收计数
read_count <= read_count + 9'h1;
end
end
SSE_WAIT_STATE: begin
//检查子扇区擦除是否完成
if(flash_sr_reg_flag == 1'b1)
flash_ew_busy <= flash_sr_reg[0];
end
READ2_STATE: begin
if(rd_data_flag == 1'b1) begin
//检查接收的数据
if(rd_data != 8'hff)
error_flag <= 1'b1;
end
end
default: begin
read_count <= 9'h0;
end
endcase
end
end
//生成写入的数据
always @(posedge sys_clk)begin
if(!sys_rst_n) begin
wr_data <= 8'h0;
write_count <= 9'h0;
end
else if(current_state == PP_STATE) begin
if(wr_data_req == 1'b1) begin
//生成写入数据
wr_data <= write_count[7:0];
//写入计数
write_count <= write_count + 9'h1;
end
end
else begin
wr_data <= 0;
write_count <= 0;
end
end
flash_driver #(
.SPI_CLK_PERIOD(4),
.SPI_CS_DELAY(500),
.DATA_REQ_ADVANCE(1)
)
flash_driver_inst0(
.sys_rst_n(sys_rst_n),
.sys_clk(sys_clk),
.flash_start(flash_start),
.flash_cmd(flash_cmd),
.flash_addr(flash_addr),
.wr_data_len(wr_data_len),
.wr_data(wr_data),
.wr_data_req(wr_data_req),
.rd_data_len(rd_data_len),
.rd_data(rd_data),
.rd_data_flag(rd_data_flag),
.flash_id(flash_id),
.flash_id_flag(flash_id_flag),
.flash_sr_reg(flash_sr_reg),
.flash_sr_reg_flag(flash_sr_reg_flag),
.flash_idle(flash_driver_idle),
.spi_clk(spi_sclk),
.spi_mosi(spi_mosi),
.spi_miso(spi_miso),
.spi_cs(spi_cs)
);
endmodule
仿真激励
`timescale 1ns / 1ps
module tb_spi_flash_rw_test( );
reg sys_rst_n;
reg sys_clk;
wire spi_mosi;
reg spi_miso;
wire spi_clk;
wire spi_cs;
wire alarm_led;
reg [7:0] miso_data;
reg signed [7:0] loop_cnt1;
reg [16:0] loop_cnt2;
initial begin
sys_clk = 1'b0;
sys_rst_n = 1'b0;
#200
sys_rst_n = 1'b1;
end
//产生MISO
initial begin
spi_miso = 1'b1;
//模拟读flash ID
wait(spi_cs == 1'b0);
miso_data = 8'h0;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
miso_data = 8'hef;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
miso_data = 8'h40;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
miso_data = 8'h18;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
wait(spi_cs == 1'b1);
spi_miso = 1'b1;
//模拟写使能
wait(spi_cs == 1'b0);
miso_data = 8'h0;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
wait(spi_cs == 1'b1);
spi_miso = 1'b1;
//模拟全擦除
wait(spi_cs == 1'b0);
miso_data = 8'h0;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
wait(spi_cs == 1'b1);
spi_miso = 1'b1;
//模拟全擦除忙
wait(spi_cs == 1'b0);
miso_data = 8'h0;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
miso_data = 8'h01;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
wait(spi_cs == 1'b1);
spi_miso = 1'b1;
//模拟全擦除空闲
wait(spi_cs == 1'b0);
miso_data = 8'h0;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
miso_data = 8'h00;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
wait(spi_cs == 1'b1);
spi_miso = 1'b1;
//模拟写使能
wait(spi_cs == 1'b0);
miso_data = 8'h0;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
wait(spi_cs == 1'b1);
spi_miso = 1'b1;
//模拟写
wait(spi_cs == 1'b0);
for(loop_cnt2 = 0; loop_cnt2 < 4; loop_cnt2 = loop_cnt2 + 1) begin
miso_data = 8'h0;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
end
for(loop_cnt2 = 0; loop_cnt2 < 256; loop_cnt2 = loop_cnt2 + 1) begin
miso_data = 8'h0;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
end
wait(spi_cs == 1'b1);
spi_miso = 1'b1;
//模拟写忙
wait(spi_cs == 1'b0);
miso_data = 8'h0;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
miso_data = 8'h01;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
wait(spi_cs == 1'b1);
spi_miso = 1'b1;
//模拟写空闲
wait(spi_cs == 1'b0);
miso_data = 8'h0;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
miso_data = 8'h00;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
wait(spi_cs == 1'b1);
spi_miso = 1'b1;
//模拟读
wait(spi_cs == 1'b0);
for(loop_cnt2 = 0; loop_cnt2 < 5; loop_cnt2 = loop_cnt2 + 1) begin
miso_data = 8'h0;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
end
for(loop_cnt2 = 0; loop_cnt2 < 256; loop_cnt2 = loop_cnt2 + 1) begin
miso_data = loop_cnt2[7:0];
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
end
wait(spi_cs == 1'b1);
spi_miso = 1'b1;
//模拟写使能
wait(spi_cs == 1'b0);
miso_data = 8'h0;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
wait(spi_cs == 1'b1);
spi_miso = 1'b1;
//模拟子扇区擦除
wait(spi_cs == 1'b0);
for(loop_cnt2 = 0; loop_cnt2 < 4; loop_cnt2 = loop_cnt2 + 1) begin
miso_data = 8'h0;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
end
wait(spi_cs == 1'b1);
spi_miso = 1'b1;
//模拟子扇区擦除忙
wait(spi_cs == 1'b0);
miso_data = 8'h0;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
miso_data = 8'h01;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
wait(spi_cs == 1'b1);
spi_miso = 1'b1;
//模拟子扇区擦除空闲
wait(spi_cs == 1'b0);
miso_data = 8'h0;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
miso_data = 8'h00;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
wait(spi_cs == 1'b1);
spi_miso = 1'b1;
//模拟读
wait(spi_cs == 1'b0);
for(loop_cnt2 = 0; loop_cnt2 < 5; loop_cnt2 = loop_cnt2 + 1) begin
miso_data = 8'h0;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
end
for(loop_cnt2 = 0; loop_cnt2 < 256; loop_cnt2 = loop_cnt2 + 1) begin
miso_data = 8'hff;
for(loop_cnt1 = 7; loop_cnt1 >= 0; loop_cnt1 = loop_cnt1 - 1) begin
wait((spi_clk == 1'b0) && (spi_cs == 1'b0));
spi_miso = miso_data[loop_cnt1];
wait((spi_clk == 1'b1) && (spi_cs == 1'b0));
end
end
wait(spi_cs == 1'b1);
spi_miso = 1'b1;
end
//产生时钟
always #10 sys_clk = ~sys_clk;
spi_flash_rw_test #(
.ALARM_LED_PERIOD(25'd250)
)
tb_spi_flash_rw_test_inst0(
.sys_rst_n(sys_rst_n),
.sys_clk(sys_clk),
.spi_mosi(spi_mosi),
.spi_miso(spi_miso),
.spi_sclk(spi_clk),
.spi_cs(spi_cs),
.alarm_led(alarm_led)
);
endmodule
引脚约束
create_clock -period 20.000 -name sys_clk -waveform {0.000 10.000} [get_ports sys_clk]
set_property IOSTANDARD LVCMOS15 [get_ports sys_clk]
set_property PACKAGE_PIN R4 [get_ports sys_clk]
set_property IOSTANDARD LVCMOS15 [get_ports sys_rst_n]
set_property PACKAGE_PIN U7 [get_ports sys_rst_n]
set_property IOSTANDARD LVCMOS15 [get_ports alarm_led]
set_property PACKAGE_PIN V9 [get_ports alarm_led]
set_property IOSTANDARD LVCMOS33 [get_ports spi_cs]
set_property PACKAGE_PIN N14 [get_ports spi_cs]
set_property IOSTANDARD LVCMOS33 [get_ports spi_miso]
set_property PACKAGE_PIN N13 [get_ports spi_miso]
set_property IOSTANDARD LVCMOS33 [get_ports spi_mosi]
set_property PACKAGE_PIN R14 [get_ports spi_mosi]
set_property IOSTANDARD LVCMOS33 [get_ports spi_sclk]
set_property PACKAGE_PIN P14 [get_ports spi_sclk]