文章目录
- ROS2 节点
- 示例:创建并运行成功一个节点
- 1. 创建功能包
- 2. 编写源文件、CMakeLists.txt、package.xml
- 3. 编译功能包
- 4. 设置环境变量
- 5. 运行节点
- 6. 查看节点
- 参考链接
ROS2 节点
机器人的每一项功能,都被称为是一个节点。
- 每个节点都是一个独立的可执行程序;
- 每个节点都可以用不同的编程语言来编写、编译得到;
- 一个机器人的众多节点可能分布在不同的计算机上(分布式);
- 每个节点都需要一个唯一的命名。
示例:创建并运行成功一个节点
1. 创建功能包
cd ~/dev_ws/src
ros2 pkg create --build-type ament_cmake learning_node
2. 编写源文件、CMakeLists.txt、package.xml
learning_node/src/node_helloworld.cpp
#include <unistd.h>
#include "rclcpp/rclcpp.hpp"
/**
* 创建一个 HelloWorld 节点, 初始化时输出 “hello world” 日志
*/
class HelloWorldNode : public rclcpp::Node
{
public:
HelloWorldNode()
: Node("node_helloworld_class")
{
while(rclcpp::ok())
{
RCLCPP_INFO(this->get_logger(), "Hello World");
sleep(1);
}
}
};
// ROS2 节点主入口 main 函数
int main(int argc, char *argv[])
{
// ROS2 C++ 接口初始化
rclcpp::init(argc, argv);
// 创建 ROS2 节点对象并进行初始化
rclcpp::spin(std::make_shared<HelloWorldNode>());
// 关闭 ROS2 C++ 接口
rclcpp::shutdown();
return 0;
}
learning_node/src/CMakeLists.txt
cmake_minimum_required(VERSION 3.8)
project(learning_node_cpp)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
# uncomment the following section in order to fill in
# further dependencies manually.
# find_package(<dependency> REQUIRED)
find_package(rclcpp REQUIRED) # 人为添加
add_executable(node_helloworld_class src/node_helloworld_class.cpp) # 人为添加
ament_target_dependencies(node_helloworld_class rclcpp) # 人为添加
install(TARGETS
node_helloworld_class
DESTINATION lib/${PROJECT_NAME}) # 人为添加
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# comment the line when this package is in a git repo and when
# a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()
learning_node/src/package.xml
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>learning_node_cpp</name>
<version>0.0.0</version>
<description>TODO: Package description</description>
<maintainer email="wynhelloworld@gmail.com">wyn</maintainer>
<license>TODO: License declaration</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>
3. 编译功能包
cd ~/dev_ws
colcon build # 编译工作空间的所有功能包
4. 设置环境变量
cd ~/dev_ws
source install/local_setup.sh # 仅在当前终端生效
echo " source ~/dev_ws/install/local_setup.sh" >> ~/.bashrc # 所有终端均生效
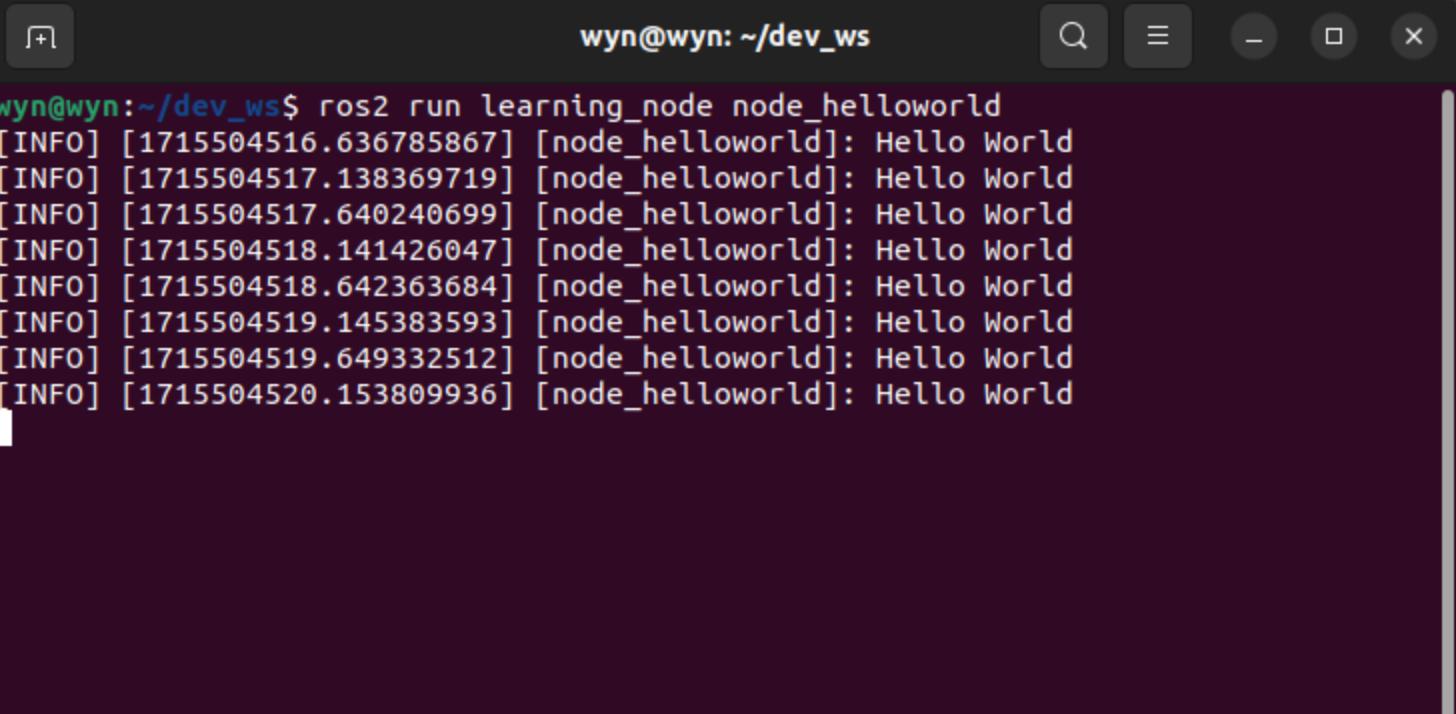
5. 运行节点
ros2 run learning_node node_helloworld
6. 查看节点
-
ros2 node list:查看正在运行的节点
-
ros2 node info [options] node_name:显示节点信息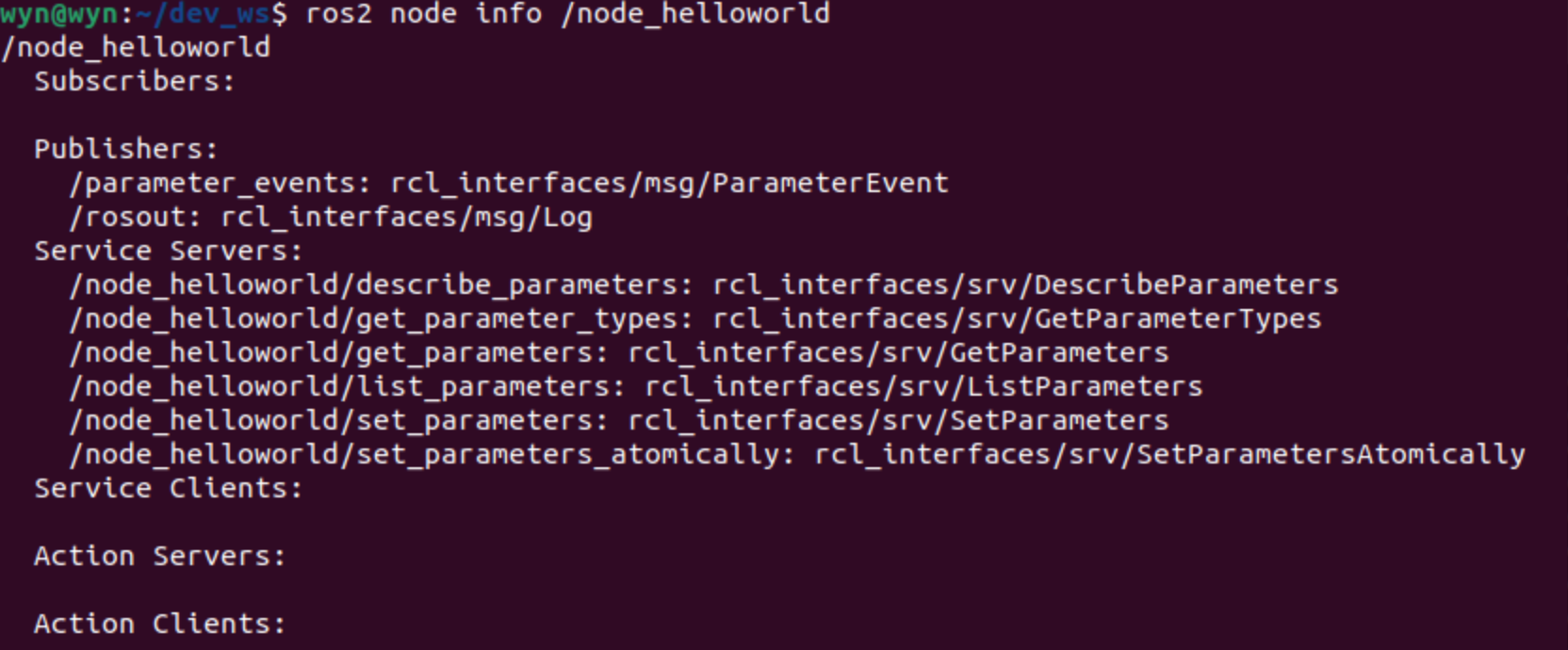
参考链接
https://book.guyuehome.com/ROS2/2.%E6%A0%B8%E5%BF%83%E6%A6%82%E5%BF%B5/2.3_%E8%8A%82%E7%82%B9/