使用DDMA技术解决汽车雷达中的目标模糊
摘要
多普勒分多址(DDMA)是一种慢时相位编码技术,可以使用传统相控阵硬件实现多输入多输出(MIMO)雷达。然而,众所周知,DDMA会在接收到的多普勒频谱中引起模糊。虽然非对称DDMA已经被提出来缓解目标模糊问题,但它可能导致不同发射天线关联的不同目标反射之间的碰撞。本文介绍了一种基于DDMA的汽车MIMO雷达中目标模糊度的解决方法。除一个发射天线外,推荐的方法中所有天线均采用传统的DDMA。同时,使用独立于DDMA编码的单一慢时信道来解决目标模糊。实验结果表明,相对于标准的DDMA技术,该系统实现了一种有效的解决方案,且增加的复杂性很小。仿真实例验证了该方法的有效性。
1 介绍
近年来,用于高级驾驶辅助系统(ADAS)和自动驾驶技术的汽车雷达发展迅速[1]-[4]。汽车雷达用于探测、定位和跟踪车辆周围的物体,从而提高态势感知能力。在ADAS系统中,感知到的信息被用于执行碰撞预警、自动紧急制动、行人检测、交叉交通预警、巡航控制、车道保持、盲点检测等多种功能[3]。在自动驾驶中,汽车雷达与摄像头和/或激光雷达协同使用,使车辆能够感知环境并做出自动驾驶决策[5]。
汽车雷达感知旨在收集车辆周围每个物体的4D数据测量[6],[7]。测量数据提供了物体的距离、多普勒频移(径向速度)、方位角(横向距离)和仰角(高度)的估计。为了准确、高保真地估计这些参数,汽车雷达通常采用创新的阵列拓扑结构和先进的信号处理算法。例如,多输入多输出(MIMO)雷达通常用于增加阵列的有效孔径,从而提高方位角/仰角分辨率[1],[8]-[12]。这可以提高交叉距离和高度估计的精度,并增强分辨近距离目标的能力[6]。
在选择汽车雷达的波形类型时,应考虑一些实际要求。这些因素包括发射功率效率、工作频带、模数转换器(ADC)速度和所用电子元件的成本。调频连续波(FMCW)波形由于其低峰值功率和优异的距离分辨特性而被广泛应用于汽车雷达。此外,它们还可以同时测量距离和多普勒。广泛应用于汽车雷达的FMCW波形的一种特殊形式是线性调频(LFM)波形,其定义为坡道形状,频率在坡道持续时间内呈线性变化[13],[14]。LFM波形对于这种应用是理想的,因为它们易于生成,并且对接收机的信号处理要求也很简单[15]。例如,与低速ADC串联的拉伸处理(也称为deramp)的简单概念可用于距离和多普勒估计。
MIMO雷达主要有两种实现方式。第一种是脉冲内MIMO雷达,通过时分多路复用(TDM)、频分多路复用(FDM)或码分多路复用(CDM)在快速时间内实现波形分集(独立性)[16]。第二种是慢时MIMO雷达,采用慢时编码实现发射信号的可分离性[17],[18]。在这方面,除了比例因子和/或相位旋转外,所有发射天线在所有脉冲上辐射相同的雷达波形。这种方法在汽车应用中是首选的,因为它可以使用单个LFM波形,因此不需要复杂的信号处理来处理雷达接收器上的MIMO信号。由于工作时间较慢,多普勒分多址(DDMA)通过使用相位编码策略操纵与系统不同发射单元相关的多普勒频谱来实现MIMO雷达功能[18]。在接收端,采用多普勒域后处理,将多普勒频谱分离为与发射天线数量相等的多个频谱[19]。然而,DDMA在分离的多普勒频谱与相应的发射天线之间的关联中存在模糊问题[6],[20]-[22]。
本文研究了基于DDMA的汽车MIMO雷达目标模糊问题。我们提出了一种将传统的DDMA编码应用于所有发射单元的慢时相位编码方法,除一个发射单元外。被挑选出来的单元被分配一个独立的二次相位(QP)慢时编码,使接收信号的多普勒频谱从该单元中明确分离出来。分离与QP DDMA信道相关的多普勒频谱的过程包括去除接收到的慢时间测量的QP项,然后应用快速傅里叶变换(FFT)。FFT输出的峰值对应于来自与QP慢时编码相关的发射单元的目标反射。多普勒频谱的其余部分对应于传统的DDMA,它本身可能是模糊的。但是,由于具有明确频谱的发射单元相对于其余发射元件的位置是已知的,因此可以解决系统DDMA部分固有的模糊性。与现有的DDMA技术采用多普勒域的不对称划分来解决目标模糊问题不同,该方法使系统的DDMA部分使用对称划分,从而减少目标碰撞,即不同发射机相关的多普勒频谱之间的重叠较少。
本文的其余部分组织如下。第二节给出了汽车雷达信号模型。第三节简要介绍了传统的基于DDMA的慢时间编码技术。第四节提出了具有独立QP DDMA通道的DDMA方法。第五节给出了仿真结果,第六节给出了结论。
2 汽车雷达信号模型
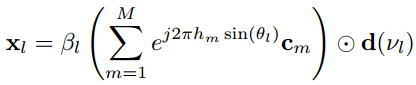
考虑一个汽车雷达系统,分别由M和N个发射(Tx)和接收(Rx)天线单元组成。假设Tx和Rx单元都以任意线性形状排列。在相干处理间隔(CPI)中,系统发送K个连续脉冲,使得所有Tx单元同时发送脉冲宽度为Tw的chirp波形。我们假设拉伸处理应用于接收器,并专注于单个距离单元。设L为目标距离单元中移动目标的个数。由于第l个目标的接收信号的K×1复向量可以建模为
 (1)
(1)
其中![]() 是第l个目标相关的反射系数,
是第l个目标相关的反射系数,![]() ,
,![]() 是第m个和第一个Tx单元之间的位移,
是第m个和第一个Tx单元之间的位移,![]() 表示第l个目标的到达方向,
表示第l个目标的到达方向,![]() 是预先设计的与第m个Tx单元相关的慢时间相位编码的K×1向量,
是预先设计的与第m个Tx单元相关的慢时间相位编码的K×1向量,![]() 为第l个目标的归一化多普勒频率,并且
为第l个目标的归一化多普勒频率,并且
 (2)
(2)
是第l个目标相关的多普勒导向矢量。在公式(2)中,符号![]() 表示转置运算。公式(1)可改写为以下紧凑形式
表示转置运算。公式(1)可改写为以下紧凑形式
![]() (3)
(3)
其中![]() 是一个对角矩阵,其对角值由向量
是一个对角矩阵,其对角值由向量![]() 给出,
给出,![]() 是预先设计的DDMA编码,其为K×M矩阵,同时
是预先设计的DDMA编码,其为K×M矩阵,同时
 (4)
(4)
为Tx阵列朝向![]() 方向的M × 1导向矢量。
方向的M × 1导向矢量。
与第n个Rx单元相关的慢时间数据的K×1复向量可以建模为
 (5)
(5)
式中,![]() 为第n个Rx单元与第1个Rx单元之间的位移,
为第n个Rx单元与第1个Rx单元之间的位移,![]() 为协方差为
为协方差为![]() 的加性零均值白噪声,
的加性零均值白噪声,![]() 为K×K单位矩阵。
为K×K单位矩阵。
由式(5)可以看出,观测到的慢时间信号是所有发射天线辐射的所有信号的混合。因此,为了实现MIMO操作,必须在接收端(即从式(5))可靠且明确地提取不同发射单元对应的信号分量。
3 传统基于DDMA的MIMO雷达
在本节中,我们概述了基于DDMA的慢时间MIMO雷达。重点介绍了多普勒域DDMA的实现过程,并讨论了该技术中经常遇到的目标模糊问题。
DDMA-MIMO雷达的本质是使用傅里叶基函数填充(5)中的慢时间编码矩阵C。通常使用对称DDMA来实现多普勒域的均匀划分。在这种情况下,DDMA编码矩阵可以计算为
 (6)
(6)
(6)中DDMA矩阵的结构意味着与第m个Tx单元相关的多普勒频谱在归一化多普勒域中移位 。因此,与频域中每个Tx单元相关联的多普勒频谱的分离为
。因此,与频域中每个Tx单元相关联的多普勒频谱的分离为
![]() (7)
(7)
其中,![]() ,
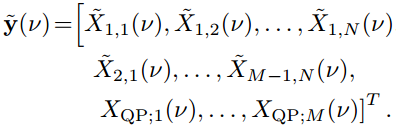
,![]() 表示离散序列的离散傅里叶变换。因此,对于任意多普勒频率ν,扩展阵列数据快照的MIMO雷达MN ×1复向量可以构造为
表示离散序列的离散傅里叶变换。因此,对于任意多普勒频率ν,扩展阵列数据快照的MIMO雷达MN ×1复向量可以构造为
![]() (8)
(8)
值得注意的是,通过使用快速傅里叶变换(FFT),可以非常有效地执行(7)的计算和(8)中的重构。实际上,每个接收单元需要一个多普勒域FFT操作。然而,(8)中的数据快照条目与相应的MIMO雷达虚拟布局的关联,例如将X1,1v![]() 与MIMO雷达虚拟阵列的Tx1−Rx1对相关联,除非满足目标多普勒频率的限制条件,否则是不明确的。为了确保分解(7)和重建(8)是明确的,最大目标多普勒频率应满足条件|vl
与MIMO雷达虚拟阵列的Tx1−Rx1对相关联,除非满足目标多普勒频率的限制条件,否则是不明确的。为了确保分解(7)和重建(8)是明确的,最大目标多普勒频率应满足条件|vl![]() |≤1/M。不幸的是,这导致可以通过M因子明确检测到的最大目标速度降低。
|≤1/M。不幸的是,这导致可以通过M因子明确检测到的最大目标速度降低。
4 提出的基于DDMA的MIMO雷达
在本节中,我们提出了一种新的DDMA相位编码方案,该方案促进了明确的MIMO实现,同时允许目标多普勒频率仅受奈奎斯特采样率的限制。该方法的本质是为一个Tx天线分配一个独特的多普勒特征,并对其余的Tx单元使用传统的DDMA相位编码。我们假设,在不损失一般性的情况下,前M-1个单元用传统的DDMA相位码编码,而第M个单元被分配一个独特的多普勒特征,与DDMA编码不同。因此,提出的慢时间编码矩阵采用以下格式
 (9)
(9)
其中, 表示与第m个Tx单元相关的DDMA多普勒频移。然后,手头的任务是设计(9)中的最后一列
表示与第m个Tx单元相关的DDMA多普勒频移。然后,手头的任务是设计(9)中的最后一列![]() ,使与第M个Tx天线相关的多普勒频谱与整体多普勒频谱能够稳健有效地分离。在这里,我们提出了一种简单的
,使与第M个Tx天线相关的多普勒频谱与整体多普勒频谱能够稳健有效地分离。在这里,我们提出了一种简单的![]() 设计策略,并给出了分离与所有Tx单元相关的多普勒频谱的信号处理框架,以获得与任意多普勒频率ν相关的空间快照。
设计策略,并给出了分离与所有Tx单元相关的多普勒频谱的信号处理框架,以获得与任意多普勒频率ν相关的空间快照。
A 慢时间二次相序列
在设计![]() 时要考虑的一个关键因素是系统的DDMA和非DDMA信道之间的交叉干扰。为了尽量减少这种跨信道干扰的影响,我们采用了在整个多普勒域中分散第m信道能量的判据。这可以通过选择
时要考虑的一个关键因素是系统的DDMA和非DDMA信道之间的交叉干扰。为了尽量减少这种跨信道干扰的影响,我们采用了在整个多普勒域中分散第m信道能量的判据。这可以通过选择![]() 作为QP序列来实现,即
作为QP序列来实现,即
 (10)
(10)
其中α和γ分别表示QP序列的线性项和二次项的系数。参数α和γ可以适当地选择,以使跨通道干扰最小化。(10)中的QP序列的使用表明,关联的频率是慢时间指标的线性函数,即
![]() (11)
(11)
其中k为慢时间指数。这里的参数α可用于确定第M个 Tx多普勒频谱的初始频率,而γ控制QP信号在多普勒域的色散程度。例如,可以设置γ,使QP信号在整个多普勒域内传播,这将在下一节中说明。
B 接收信号处理架构
所提出的编码方案产生的慢时间观测向量是DDMA编码和QP编码数据的混合。使用式(9)和式(10),与第n个Rx单元相关的慢时间数据的K × 1复向量由式给出
 (12)
(12)
其中,![]() 是与阵列的前M−1个单元相关联的发射阵列导向矢量。与DDMA信道相关的多普勒频谱可以通过计算
是与阵列的前M−1个单元相关联的发射阵列导向矢量。与DDMA信道相关的多普勒频谱可以通过计算![]() 的DFT得到,即
的DFT得到,即
![]() (13)
(13)
与DDMA通道(13)相关联的频谱包含有关前M-1个 Tx单元的信息。然而,该信息不能与单独的![]() 明确分离,因为它具有与传统DDMA方案相同的缺点。因此,我们利用QP信道的多普勒频谱来解决目标模糊问题。QP信道的多普勒频谱可以先对
明确分离,因为它具有与传统DDMA方案相同的缺点。因此,我们利用QP信道的多普勒频谱来解决目标模糊问题。QP信道的多普勒频谱可以先对![]() 进行降阶,去掉QP项,然后计算降阶后信号的DFT,即
进行降阶,去掉QP项,然后计算降阶后信号的DFT,即
![]() (14)
(14)
其中![]() 是复共轭。
是复共轭。
QP信道多普勒频谱只包含第m个Tx单元的空间信息。DDMA信道的能量预计将分散在整个多普勒频谱上,这是拉伸处理步骤的结果。因此,我们使用QP频谱来识别多普勒空间中的目标位置以及相关的空间信息,从而使我们能够识别DDMA信道中目标峰的适当顺序。因此,可以将DDMA信道分离为M-1个频谱,即
![]() (15)
(15)
利用式(14)和式(15),可以构造扩展阵列数据快照的MIMO雷达MN×1复向量为
 (16)
(16)
然后将空间处理应用于(16)的每个感兴趣的多普勒单元,也就是说,对于保证有阳性目标检测的每个多普勒单元。在这方面,可以采用单快照寻角技术,如[11]、[23]、[24]。
值得注意的是,当一个或多个目标具有径向速度时,可以在同一个多普勒单元中观察到来自同一TX信道的多个目标的多普勒频率。在这种情况下,可以在空间域中对目标进行解析。下一节给出的两个仿真示例之一将考虑此场景。
5 仿真结果
在我们的仿真中,我们考虑一个配备了4个Tx天线和一个Rx天线单元的汽车雷达。我们专注于一个特定的距离单元,其中三个移动目标位于空间方向- 10°,0°和10°。相应的归一化多普勒频率分别为0.1、0.37和0.64。所有目标的反射系数都具有单位相位和随机相位。慢时测量(即应用多普勒FFT之前)的信噪比(SNR)对三个目标均为0 dB。使用的慢时间脉冲数K = 512,过采样因子为4,即FFT点数为NFFT![]() = 2048,得到FFT频谱。首先,传统的DDMA使用在归一化频率0、1/4、1/2和3/4下计算的四个傅立叶基来实现。我们计算并绘制了原始信号的多普勒频谱,即三个目标的混合物,而不应用任何慢时编码。相应的频谱如图1的上图所示,常规DDMA的多普勒频谱如图1的下图所示。结果表明,在三个目标的真多普勒位置,原始频谱有三个峰。该图还显示,传统的DDMA频谱为每个目标呈现4个峰。对于每个目标,用归一化多普勒值1/4将峰值分开。虽然频谱清楚地显示了每个目标的所有峰,但从图中无法唯一地识别每个峰与其对应的Tx元素的关联。
= 2048,得到FFT频谱。首先,传统的DDMA使用在归一化频率0、1/4、1/2和3/4下计算的四个傅立叶基来实现。我们计算并绘制了原始信号的多普勒频谱,即三个目标的混合物,而不应用任何慢时编码。相应的频谱如图1的上图所示,常规DDMA的多普勒频谱如图1的下图所示。结果表明,在三个目标的真多普勒位置,原始频谱有三个峰。该图还显示,传统的DDMA频谱为每个目标呈现4个峰。对于每个目标,用归一化多普勒值1/4将峰值分开。虽然频谱清楚地显示了每个目标的所有峰,但从图中无法唯一地识别每个峰与其对应的Tx元素的关联。

图1 (上)未进行慢时编码的原始信号的多普勒频谱,(下)采用四等距傅立叶基的传统DDMA慢时编码。
图2显示的是DDMA信道的多普勒频谱在上,QP信道的多普勒频谱在下。DDMA通道用于复用阵列的前三个Tx单元,使用分别在频率0、1/3和2/3处计算的三个傅立叶基。DDMA信道的第一个傅立叶基是一个全1的矢量,这意味着与第一个Tx相关的频谱在多普勒域中将具有零移。QP通道使用α = 0和γ = 1/K来实现。选择α意味着QP通道和相应的第4 Tx的多普勒频谱将不会出现多普勒频移。该图的顶部图表显示,每个目标都有三个峰,它们彼此之间以1/3的归一化多普勒值分开。同样,不可能单独将峰值与顶部图中相应的Tx元素唯一地关联起来。另一方面,底部的图显示了与第4个Tx相关的目标峰。因此,这两个频谱被联合使用来明确地重建每个目标的空间数据。

图2 所提出的慢时编码方案的多普勒频谱(上)具有三个傅立叶基的DDMA信道和(下)QP信道,其中显示了与第4个Tx单元相关的所有三个目标的峰值。
值得注意的是,由于在整个多普勒域中分散了所有其他信道的能量,所提出的方案可能在QP信道中遭受高噪声。这可以通过对比图1底部的传统DDMA频谱的噪声水平和图2底部的QP信道多普勒频谱的噪声水平来观察。这种增加的噪声水平对目标探测及其缓解的影响将是未来研究的重点。
在第二个示例中,我们使用与前一个示例相同的系统设置,只是我们假设有四个目标而不是三个,并且我们假设接收天线的数量为N = 8。我们还假设所有目标具有相同的速度,即所有目标位于相同的距离-多普勒单元。假设四个目标分别位于- 20°、- 15°、- 10°和- 5°的空间方向。本文分别对传统DDMA方法和本文提出的方法进行了MN × 1空间快照的重构。在第一种情况下,目标归一化多普勒频率取νtar = 0.1,这意味着两种方法在空间快照重建中不存在模糊。在第二种情况下,使用的目标归一化多普勒频率被设置为νtar = 0.55,这导致对流DDMA方法的重建不明确。图3显示了两种情况下的多普勒频谱与归一化多普勒频率。图的前四个子图分别为目标的原始(真实)多普勒频谱、传统DDMA的多普勒频谱、本文方法的前三个Tx单元的多普勒频谱和νtar = 0.1情况下本文方法的最后一个Tx单元的多普勒频谱。在νtar = 0.55的情况下,第二种情况的相应多普勒频谱显示在同一图的底部四个子图中。

图3 对原始信号的多普勒频谱不进行任何慢时间编码,传统的DDMA慢时间编码采用4个等间隔傅立叶基,本文方法的前3个Tx信道,最后一个信道采用QP慢速编码;(上)所有目标具有相同的归一化多普勒频率νtar = 0.1,(下)所有目标具有相同的归一化多普勒频率νtar = 0.55。
两种情况下的空间频谱都是通过计算重建快照的FFT来计算的。图4的顶部显示了考虑的两种情况下传统DDMA方法的空间频谱,而同一图的底部图显示了提出的DDMA方法的空间频谱。从图中可以看出,当νtar = 0.1时,两种方法在目标真实方向附近都有四个峰值。对于第二种情况(νtar = 0.55),由于重构快照的顺序不明确,传统DDMA方法的空间谱不能显示四个峰,如图4的顶部图所示。另一方面,从图4底部的图中可以看出,第二种情况下的空间频谱在真实目标位置附近仍然呈现出四个峰,这表明了其解决目标模糊的能力。

图4 (上)为传统DDMA重构空间快照的空间谱,(下)为本文方法重构空间快照的空间谱。
6 结论
本文研究了用单发射LFM波形实现MIMO结构的问题。这种方法降低了成本和复杂性,同时提供了MIMO配置所提供的更高的空间自由度。这是通过将一些多普勒自由度(DOF)交换为空间DOF来实现的,这会导致接收器上的目标速度模糊。我们通过提出一种慢时间编码方法来解决这个问题,该方法允许恢复明确的速度,并明确重建与每个目标速度相关的空间快照。我们还提出了该策略的接收器实现,并通过仿真验证了其性能。