文章目录
前言
背景介绍
问题描述
分析排查
解决方案
总结归纳
前言
见《研发日记,Matlab/Simulink避坑指南(七)——数据溢出钳位Bug》
见《研发日记,Matlab/Simulink避坑指南(八)——else if分支结构Bug》
见《研发日记,Matlab/Simulink避坑指南(九)——可变数组应用Bug》
见《【研发日记】Matlab/Simulink避坑指南(十)——移位溢出Bug》
见《【研发日记】Matlab/Simulink避坑指南(十一)——Delay周期Bug》
背景介绍
最近在一个项目中,使用Simulink写一段嵌入式代码,功能是滚动输出一组0~7的序列,但是软件启动第一个周期输出的0,要做特殊处理改成输出1。乍一看感觉挺简单,想着直接用一个Initialize Function模块重写第一个周期的值就能搞定了,但是就这么一个小应用让我栽了跟头,在整个工程中排查了几个小时才找到问题。下面就来分享一下这一小段个人经历。
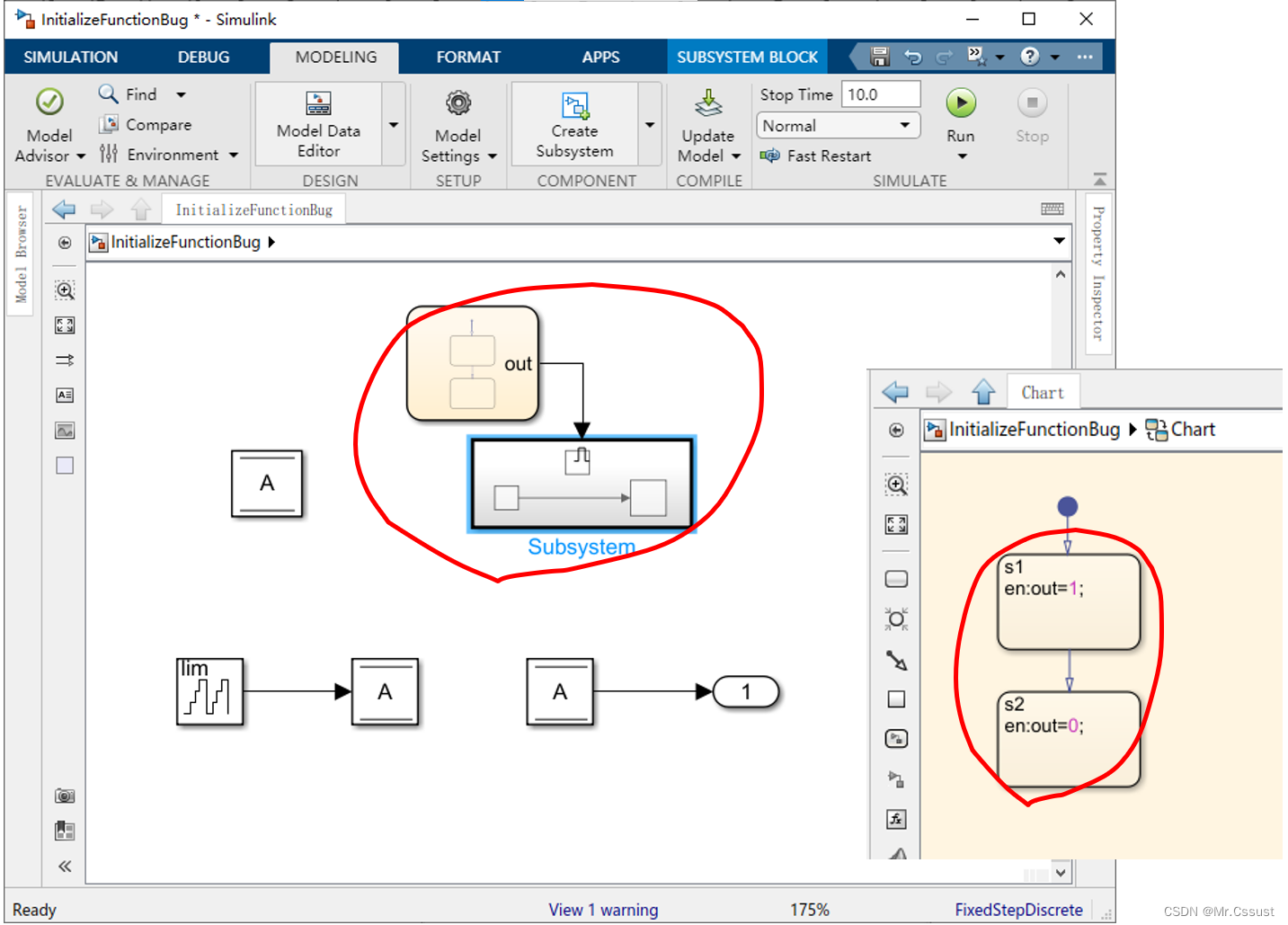
一开始的模型搭建大概是下面这个样子:

Counter Write设置的优先级最高,Read设置的优先级最低,确保第一个周期的Counter值能被Initialize Function模块重写。
问题描述
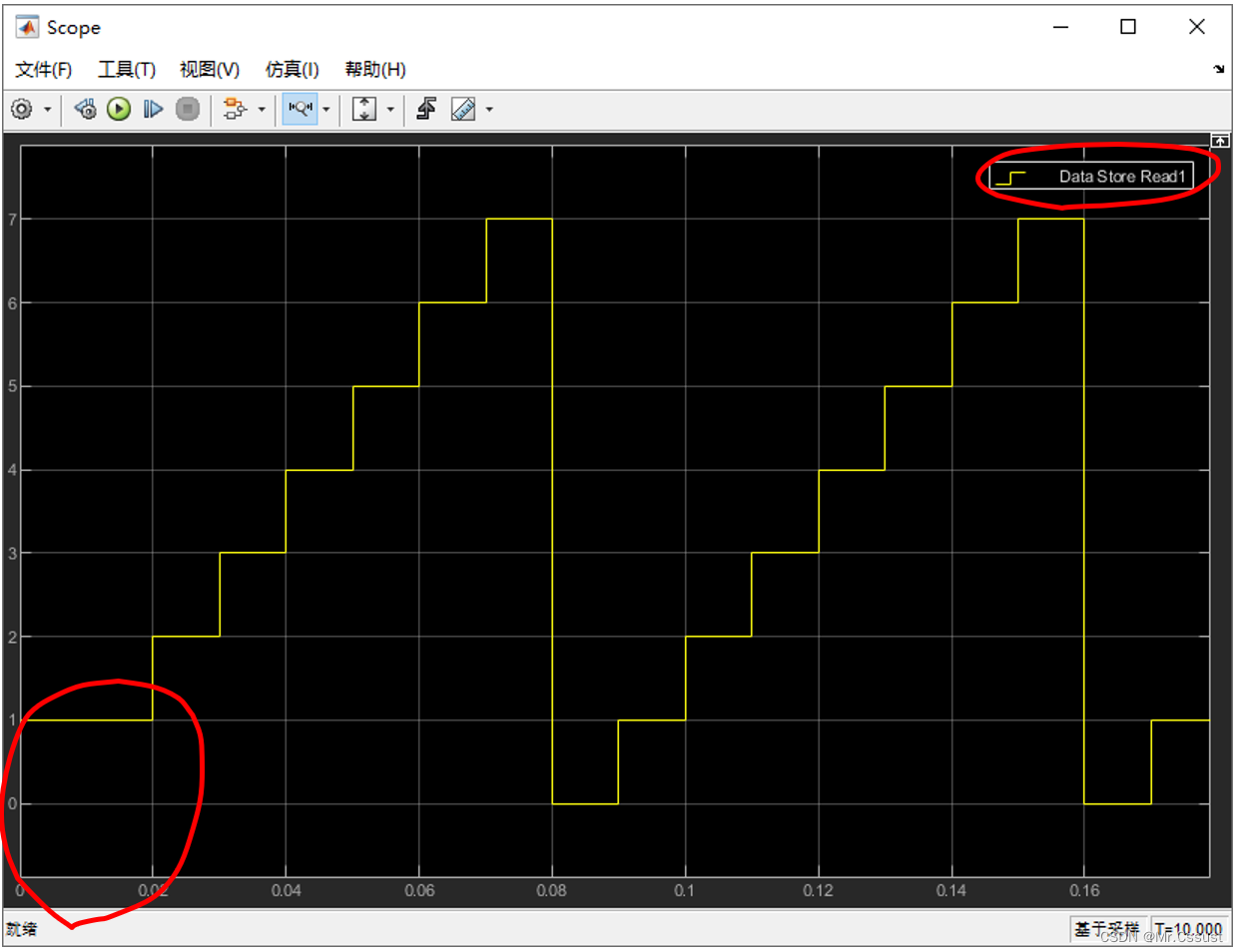
按照上述示例,预想应该可以正常运行,但是实际运行时却跟预想的不一样,示例如下:

希望看到的是第一个周期输出1,但是看到的运行结果仍是0。
分析排查
使用前段时间解锁的Debug技能《【研发日记】Matlab/Simulink技能解锁(四)——在Simulink Debugger窗口调试》,来调试一下上述模型,示例如下:
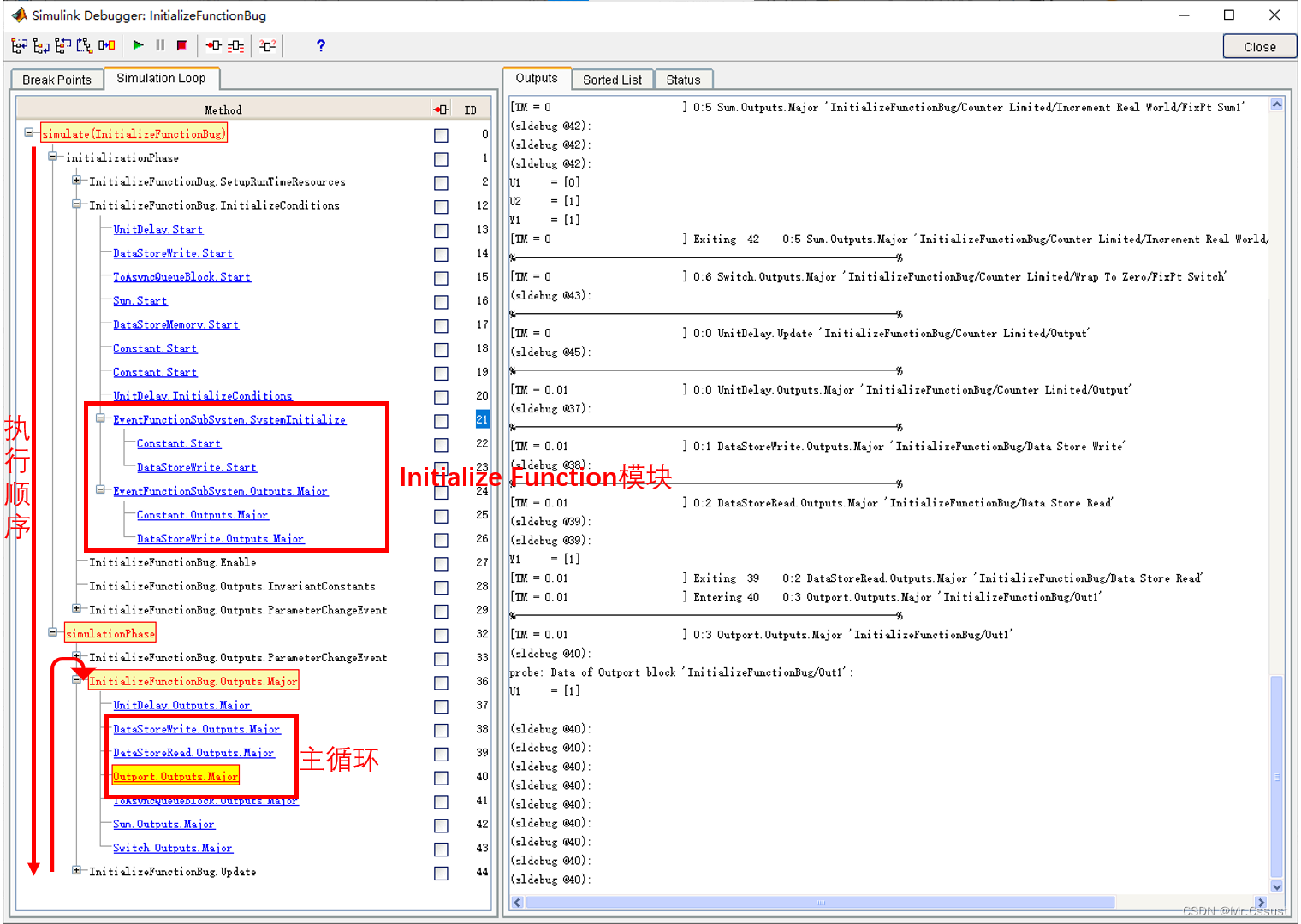
按Block步进执行,并输出Data Value,可以看到Initialize Function模块是在进入主循环之前就已经执行完了,所以才没有在第一个周期里重写Counter值。
这时候我们把模型生成C代码,来进一步确认实际执行顺序是否如上面Debuger窗口所示,示例如下:
#include <stddef.h>
#include <stdio.h> /* This ert_main.c example uses printf/fflush */
#include "InitializeFunctionBug.h" /* Model's header file */
#include "rtwtypes.h"
/*
* The example "main" function illustrates what is required by your
* application code to initialize, execute, and terminate the generated code.
* Attaching rt_OneStep to a real-time clock is target specific. This example
* illustrates how you do this relative to initializing the model.
*/
int_T main(int_T argc, const char *argv[])
{
/* Unused arguments */
(void)(argc);
(void)(argv);
/* Initialize model */
InitializeFunctionBug_initialize();//初始化模块
/* Attach rt_OneStep to a timer or interrupt service routine with
* period 0.01 seconds (the model's base sample time) here. The
* call syntax for rt_OneStep is
*
* rt_OneStep();
*/
printf("Warning: The simulation will run forever. "
"Generated ERT main won't simulate model step behavior. "
"To change this behavior select the 'MAT-file logging' option.\n");
fflush((NULL));
while (rtmGetErrorStatus(InitializeFunctionBug_M) == (NULL)) {
/* Perform other application tasks here */
/* Step the model */
InitializeFunctionBug_step();//主循环
}
/* Disable rt_OneStep() here */
/* Terminate model */
InitializeFunctionBug_terminate();
return 0;
}#include "InitializeFunctionBug.h"
#include "InitializeFunctionBug_private.h"
/* Block states (default storage) */
DW_InitializeFunctionBug_T InitializeFunctionBug_DW;
/* External outputs (root outports fed by signals with default storage) */
ExtY_InitializeFunctionBug_T InitializeFunctionBug_Y;
/* Real-time model */
static RT_MODEL_InitializeFunctionBu_T InitializeFunctionBug_M_;
RT_MODEL_InitializeFunctionBu_T *const InitializeFunctionBug_M =
&InitializeFunctionBug_M_;
/* Model step function */
void InitializeFunctionBug_step(void)
{
/* Outport: '<Root>/Out1' incorporates:
* DataStoreWrite: '<Root>/Data Store Write'
* UnitDelay: '<S1>/Output'
*/
InitializeFunctionBug_Y.Out1 = InitializeFunctionBug_DW.Output_DSTATE;
/* Switch: '<S4>/FixPt Switch' incorporates:
* Constant: '<S3>/FixPt Constant'
* Constant: '<S4>/Constant'
* Sum: '<S3>/FixPt Sum1'
* UnitDelay: '<S1>/Output'
*/
if ((uint8_T)(InitializeFunctionBug_DW.Output_DSTATE + 1U) > 7) {
InitializeFunctionBug_DW.Output_DSTATE = 0U;
} else {
InitializeFunctionBug_DW.Output_DSTATE++;
}
/* End of Switch: '<S4>/FixPt Switch' */
}
/* Model initialize function */
void InitializeFunctionBug_initialize(void)
{
/* (no initialization code required) */
/* DataStoreWrite: '<Root>/Data Store Write' */
InitializeFunctionBug_DW.Output_DSTATE = 1U;
}
/* Model terminate function */
void InitializeFunctionBug_terminate(void)
{
/* (no terminate code required) */
}
Counter值赋1的代码位于initialize(void)函数中,Counter值累加的代码和输出的代码都位于后面的while()循环体中。
根据上面的排查和分析,Initialize Function模块是在第一个周期前执行的,所以不能重写第一个周期的Counter值,问题就出在这里。
解决方案
根据上面的分析,调整第一个周期重写Counter值的方式,使用Stateflow做一个只在第一个周期运行的使能子系统,并调整优先级确保第一个周期的Counter值能被重写,示例如下:
重新运行程序,问题不再出现,Bug修复完工,示例如下:
至此,这个滚动输出一组0~7的序列,但是第一个周期输出1的应用就算是没问题了。
生的代码示例如下:
#include <stddef.h>
#include <stdio.h> /* This ert_main.c example uses printf/fflush */
#include "InitializeFunctionBug.h" /* Model's header file */
#include "rtwtypes.h"
/*
* The example "main" function illustrates what is required by your
* application code to initialize, execute, and terminate the generated code.
* Attaching rt_OneStep to a real-time clock is target specific. This example
* illustrates how you do this relative to initializing the model.
*/
int_T main(int_T argc, const char *argv[])
{
/* Unused arguments */
(void)(argc);
(void)(argv);
/* Initialize model */
InitializeFunctionBug_initialize();
/* Attach rt_OneStep to a timer or interrupt service routine with
* period 0.01 seconds (the model's base sample time) here. The
* call syntax for rt_OneStep is
*
* rt_OneStep();
*/
printf("Warning: The simulation will run forever. "
"Generated ERT main won't simulate model step behavior. "
"To change this behavior select the 'MAT-file logging' option.\n");
fflush((NULL));
while (rtmGetErrorStatus(InitializeFunctionBug_M) == (NULL)) {
/* Perform other application tasks here */
/* Step the model */
InitializeFunctionBug_step();//主循环
}
/* Disable rt_OneStep() here */
/* Terminate model */
InitializeFunctionBug_terminate();
return 0;
}#include "InitializeFunctionBug.h"
#include "InitializeFunctionBug_private.h"
/* Named constants for Chart: '<Root>/Chart' */
#define InitializeFunctionBug_IN_s1 ((uint8_T)1U)
#define InitializeFunctionBug_IN_s2 ((uint8_T)2U)
/* Block states (default storage) */
DW_InitializeFunctionBug_T InitializeFunctionBug_DW;
/* External outputs (root outports fed by signals with default storage) */
ExtY_InitializeFunctionBug_T InitializeFunctionBug_Y;
/* Real-time model */
static RT_MODEL_InitializeFunctionBu_T InitializeFunctionBug_M_;
RT_MODEL_InitializeFunctionBu_T *const InitializeFunctionBug_M =
&InitializeFunctionBug_M_;
/* Model step function */
void InitializeFunctionBug_step(void)
{
/* Outport: '<Root>/Out1' incorporates:
* DataStoreWrite: '<Root>/Data Store Write'
* UnitDelay: '<S2>/Output'
*/
InitializeFunctionBug_Y.Out1 = InitializeFunctionBug_DW.Output_DSTATE;
/* Chart: '<Root>/Chart' */
if (InitializeFunctionBug_DW.is_active_c3_InitializeFunction == 0U) {
InitializeFunctionBug_DW.is_active_c3_InitializeFunction = 1U;
InitializeFunctionBug_DW.is_c3_InitializeFunctionBug =
InitializeFunctionBug_IN_s1;
/* Outputs for Enabled SubSystem: '<Root>/Subsystem' incorporates:
* EnablePort: '<S3>/Enable'
*/
/* Outport: '<Root>/Out1' incorporates:
* Constant: '<S3>/Constant1'
* DataStoreWrite: '<S3>/Data Store Write1'
*/
InitializeFunctionBug_Y.Out1 = 1U;
/* End of Outputs for SubSystem: '<Root>/Subsystem' */
} else if (InitializeFunctionBug_DW.is_c3_InitializeFunctionBug ==
InitializeFunctionBug_IN_s1) {
InitializeFunctionBug_DW.is_c3_InitializeFunctionBug =
InitializeFunctionBug_IN_s2;
} else {
/* case IN_s2: */
}
/* End of Chart: '<Root>/Chart' */
/* Switch: '<S5>/FixPt Switch' incorporates:
* Constant: '<S4>/FixPt Constant'
* Constant: '<S5>/Constant'
* Sum: '<S4>/FixPt Sum1'
* UnitDelay: '<S2>/Output'
*/
if ((uint8_T)(InitializeFunctionBug_DW.Output_DSTATE + 1U) > 7) {
InitializeFunctionBug_DW.Output_DSTATE = 0U;
} else {
InitializeFunctionBug_DW.Output_DSTATE++;
}
/* End of Switch: '<S5>/FixPt Switch' */
}
/* Model initialize function */
void InitializeFunctionBug_initialize(void)
{
/* (no initialization code required) */
}
/* Model terminate function */
void InitializeFunctionBug_terminate(void)
{
/* (no terminate code required) */
}总结归纳
那么这个代码调试过程,发现的问题可以积累下来这么几条小经验以供自己将来使用,也供广大网友参考:
1、Initialize Function模块并不是我们预想的在主循环的第一个周期执行,而是在主循环前面执行。
2、Initialize Function模块的应用,局现性特别强。就是软件初始化工作,例如读取固件信息,配置基础的运行参数这一类,并不适合参与主程序的运算。
3、与Initialize Function类似的还有Reitialize、Rest、Terminnate,其使用方法和注意事项都是类似的。
4、Stateflow配合使能子系统,也能事项初始化相关的功能,而且用法更加灵活,适用范围更广。
5、设置模块的优先级,只能调整同一个周期中,同一级子系统内各个模块之间执行的先后顺序,不能跨越周期。
以上就是本人在解决Initialize Function模块执行Bug时,一些个人理解和分析的总结,首先介绍了基本的项目背景,然后描述了问题的想象,最后分析排查了Bug原因,并给出了问题解决方案。
后续还会分享其他的,使用Matlab/Simulink进行研发时遇到的Bug,欢迎评论区留言、点赞、收藏和关注,这些鼓励和支持都将成文本人持续分享的动力。
上述例程使用的Demo工程,可以到笔者的主页查找和下载。
版权声明:原创文章,转载请注明出处与链接,违者必究!