TOP提示:Dijkstra算法只适用于不含负权边的情况
Dijkstra算法是一个基于贪心,广搜和动态规划 求图中某点到其他所有点的最短路径的算法
一、步骤
首先我们先总结Dijkstra算法的完整步骤
我们需要一个dis数组存储从起点到达其他节点的最短距离,一个check数组判断从起点到某点的最短距离是否已确定,一个path二维数组存储图中从点 i 到点 j 的距离
一共循环n次(n个节点),起初将从起点到其他所有节点的距离(dis[i])初始化为最大值。
每次循环从dis数组中未确定最短路径的所有点中找出最小值的下标mini(第一次循环时最小值为起点dis[1],因为起点到自己的距离为0,其他的都初始化为了最大值),此时该最小值即为起点到该点的最短路径,在check数组中标记该点,然后计算从该点出发到达其他节点的距离,如果比原来的值更小则更新dis数组。
二、原理
贪心是其中的重要思想,为什么每次找出的最小值就是起点到该点的最短路径呢?
这就要提到为什么Dijkstra不适用于含负权边的情况了,当边的权值全部为正时,从起点经过其他的点到达最小值点的路径长度必定会大于原来的这个最小值!
例如你从起点到A点的最短路径是100,到B点的最短路径是200,那么你从起点经过B点到达A点的距离可能会比直接从起点到A点的距离短吗?除非从B点到A点的距离为负数。
所以当我们每次扫描未确定最短路径中的所有点,找出其中的最小值,该最小值就是起点到达该点的最短路径。经过n次循环,我们就能找出起点到达所有点的最短路径
我们以下面这道题为例实战一下:
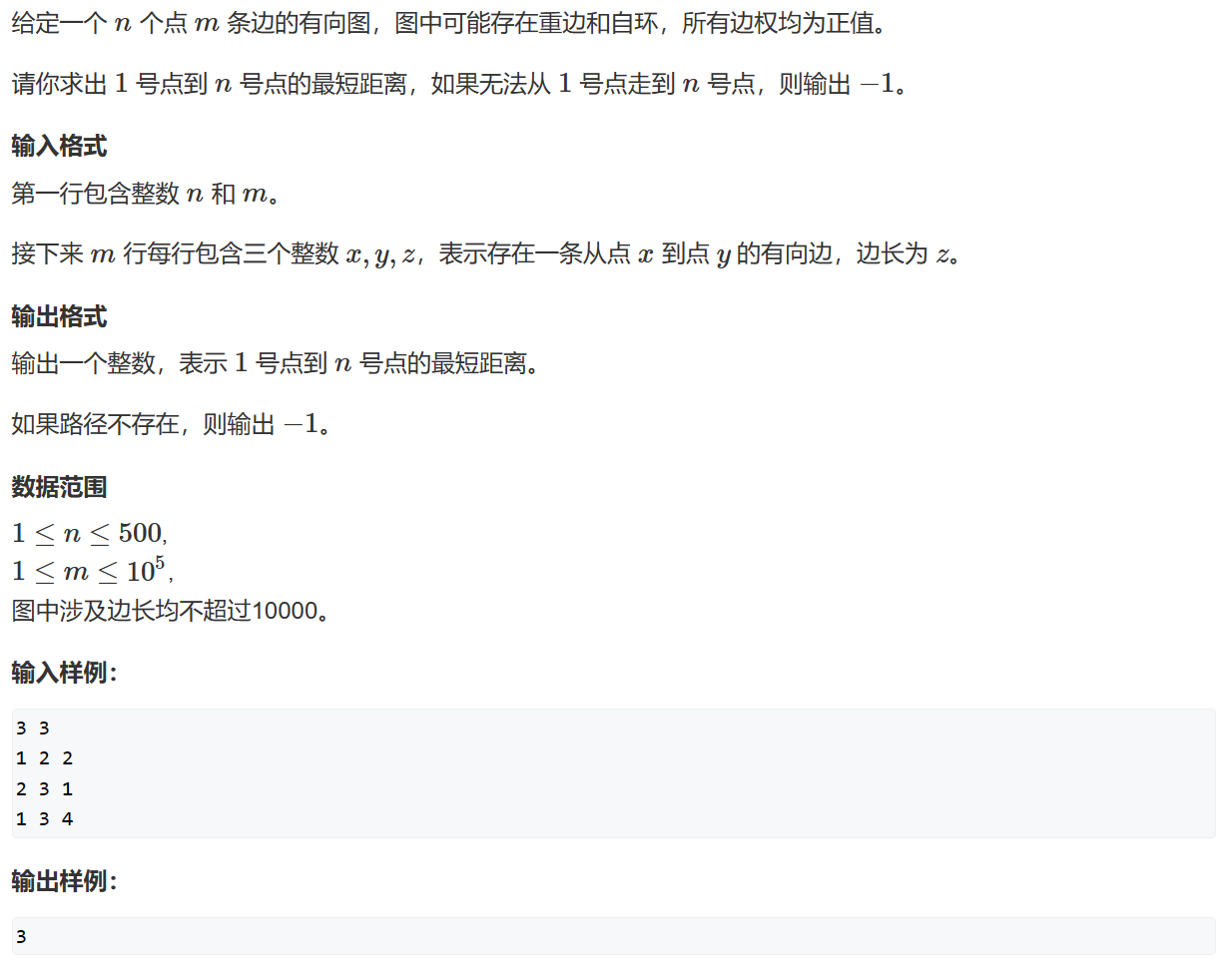
完整代码:
#include <iostream>
#include <algorithm>
#include <cstring>
using namespace std;
const int N = 510;
int n, m, dis[N];
int path[N][N];
bool check[N];
int dijkstra()
{
memset(dis, 0x3f, sizeof dis); //将起点到其他点的路径初始化为最大值
dis[1] = 0; //起点到自己的距离为0
for(int i = 1;i <= n;i++) //n次循环
{
int mini = -1;
for(int j = 1; j <= n;j++)
{
if(!check[j] && (mini == -1 || dis[mini] > dis[j]))
//从未确定最短距离的点中取出最小值
mini = j;
}
check[mini] = true; //标记该点为已确定
for(int j = 1;j <= n;j++)
{
//以该点为基础更新其他所有点的最短距离
dis[j] = min(dis[j], dis[mini] + path[mini][j]);
}
}
if(dis[n] == 0x3f3f3f3f) return -1; //如果n号点的距离还是为最大值,说明无法到达
return dis[n];
}
int main()
{
//题目中说可能存在重边,所以将边的权值初始化为最大值便于比较
memset(path, 0x3f, sizeof path);
cin >> n >> m;
for(int i = 1;i <= m;i++)
{
int a, b ,c;
cin >> a >> b >> c;
path[a][b] = min(path[a][b], c); //如果重边,取最小值
}
int t = dijkstra(); //Dijkstra算法
cout << t << endl;
return 0;
}

![[c++]多态的分析](https://img-blog.csdnimg.cn/direct/f1566f38456545a295c217543bcc7441.png)