嵌入式学习_part1
本部分笔记用于学习记录,笔记源头 >>b站江科大_STM32入门教程_新建工程
建立工程、GPIO
开发环境:keil MDK、STM32F103C8T6
1 )建立工程
(1)基于寄存器开发、基于标准库 或者 基于HAL库开发;
(2)下载ST公司的标准库文件; ST外设标准库下载链接
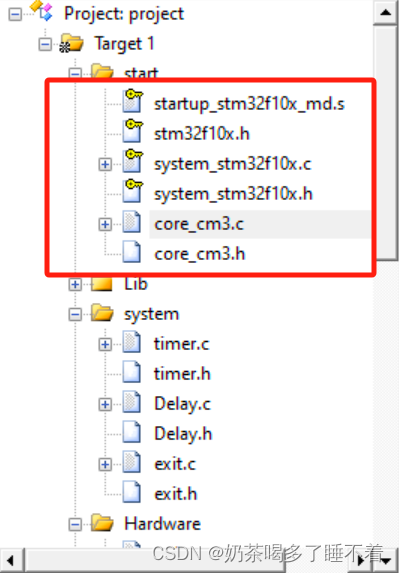
1.添加 start 文件
1.1 添加文件
内核寄存器配置信息:core_cm3.c / core_cm3.h
外设寄存器配置信息:startup_stm32f10x_md.s (启动文件)
stm32f10x.h(外设寄存器配置文件)
system_stm32f10x.h / system_stm32f10x.c (时钟配置文件)
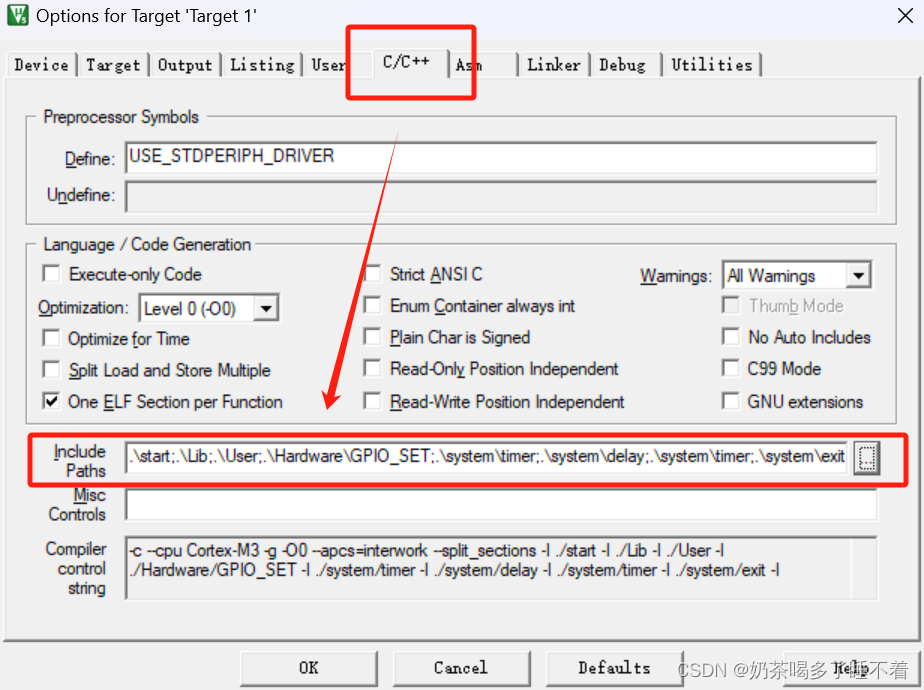
1.2 添加文件路径

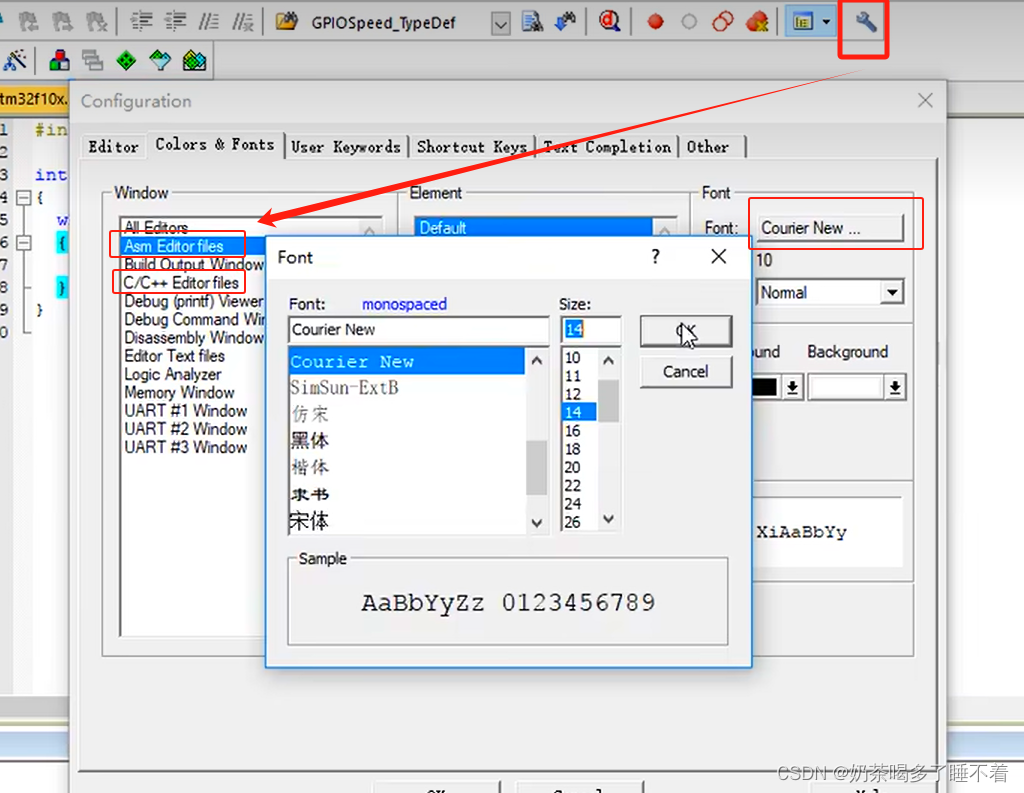
1.3 设置字体大小(color & font)
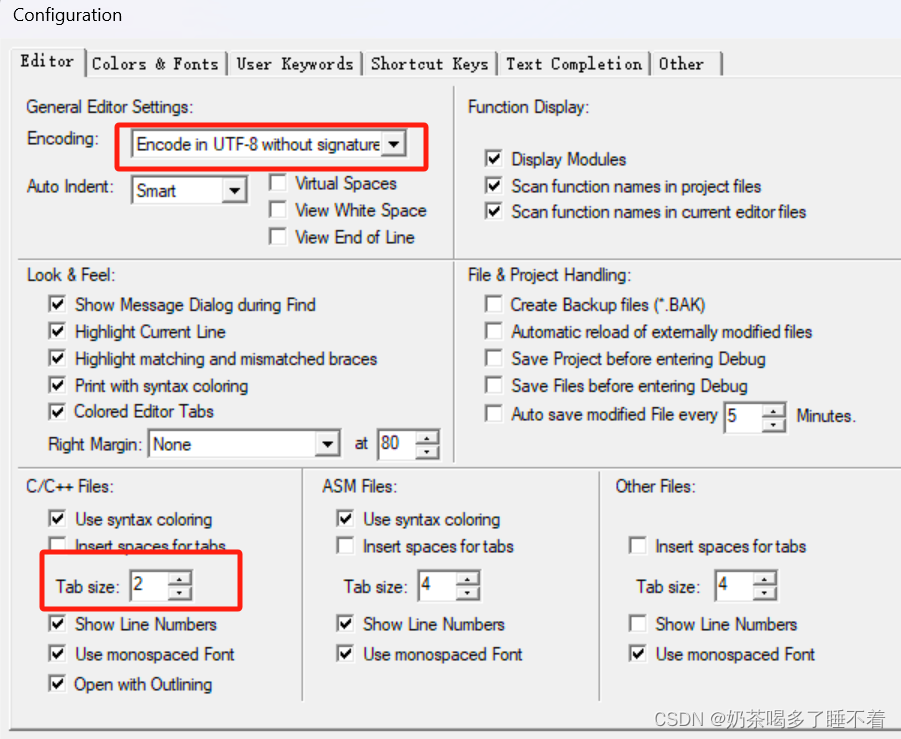
1.4 其他设置
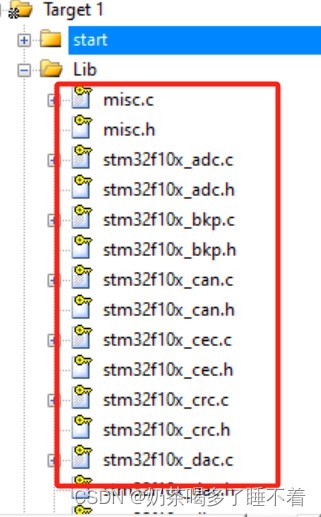
2.添加 library 文件

3.添加 User 文件
main文件:主逻辑实现
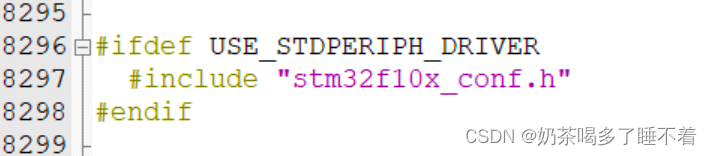
stm32f10x_conf.h:库函数的头文件包含关系
stm32f10x_it.c / stm32f10x_it.h :中断处理函数...ST公司给提供的接口
stm32f10x.h 中有个选择编译 :

4.启动文件.S的选择

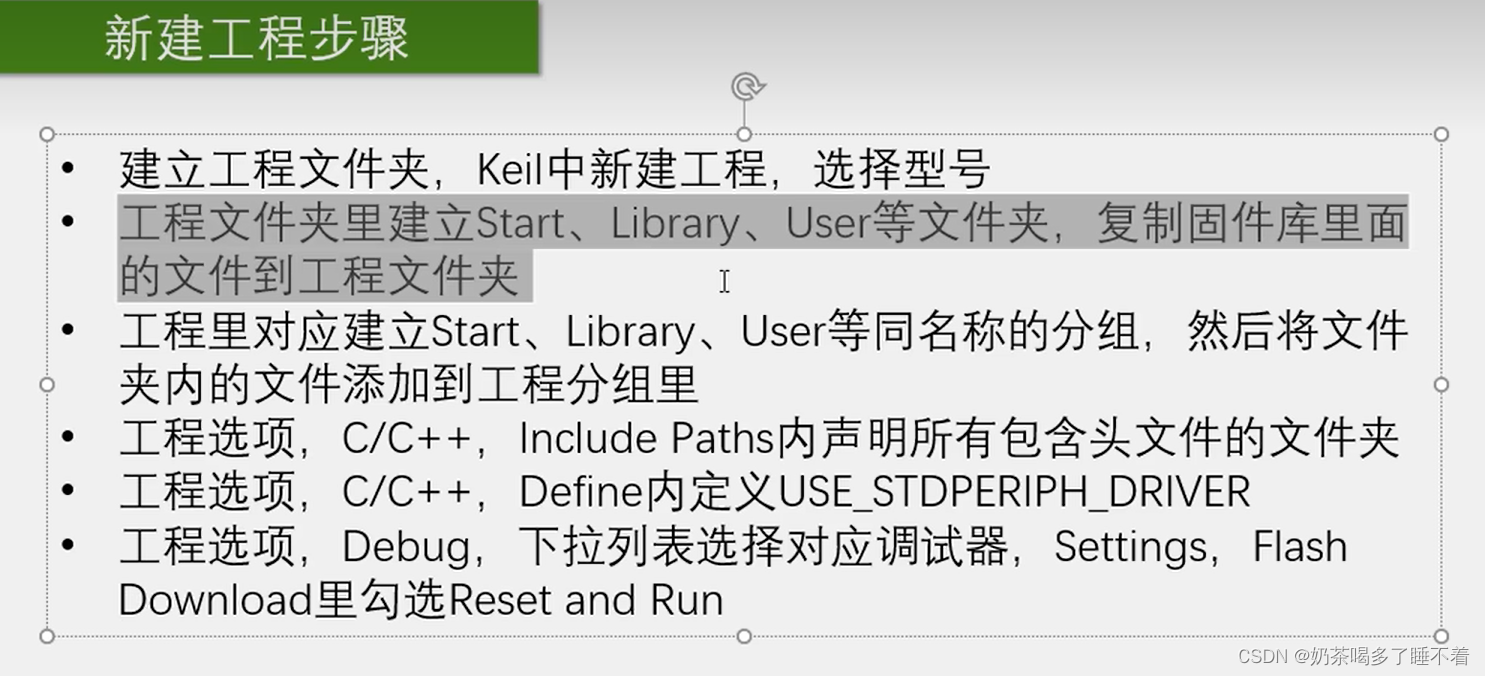
5.新建工程的步骤总结
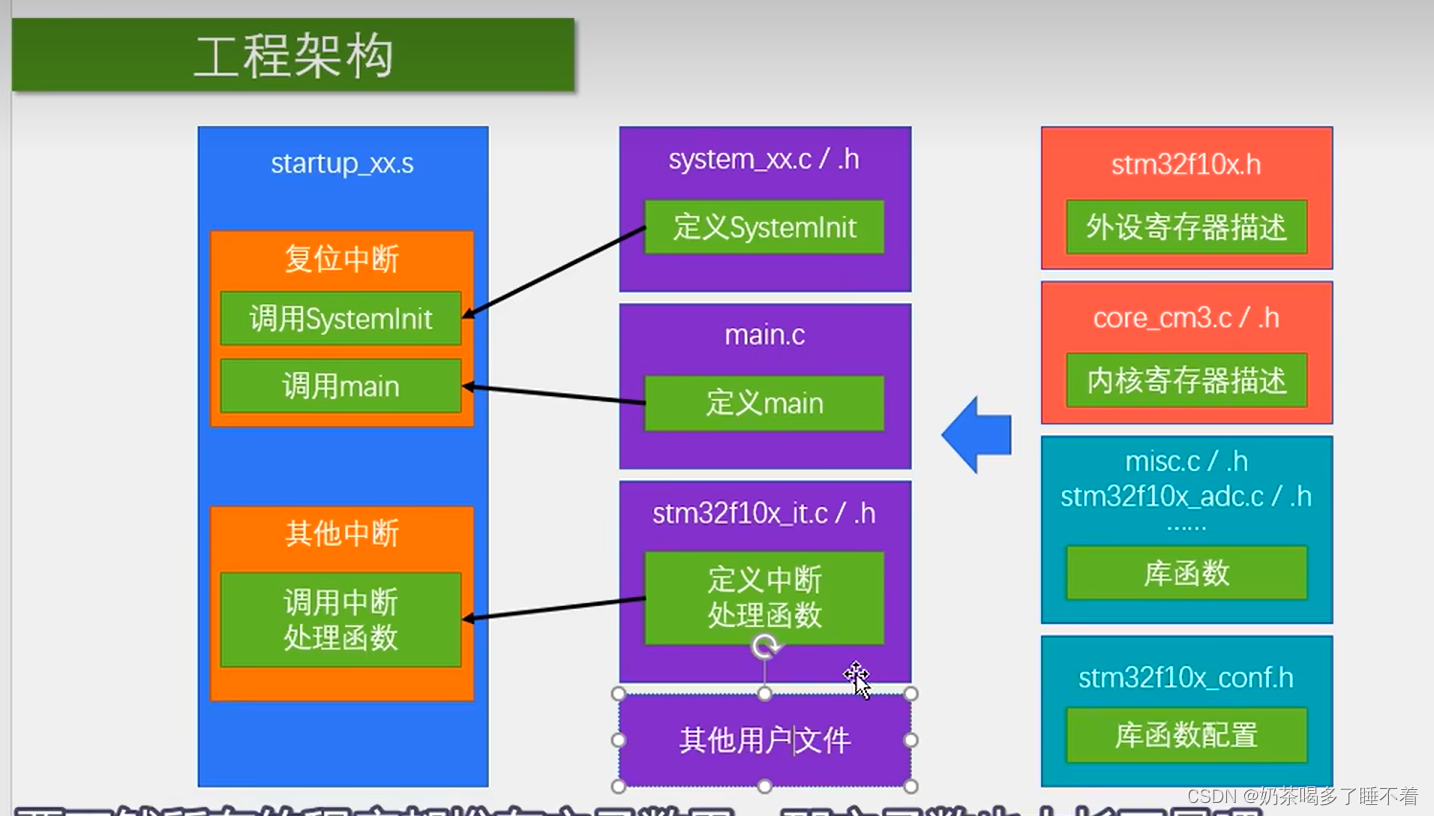
6.框架
2 )GPIO
b站江科大_STM32入门教程_GPIO
1.GPIO的功能
配置:8种输入输出模式
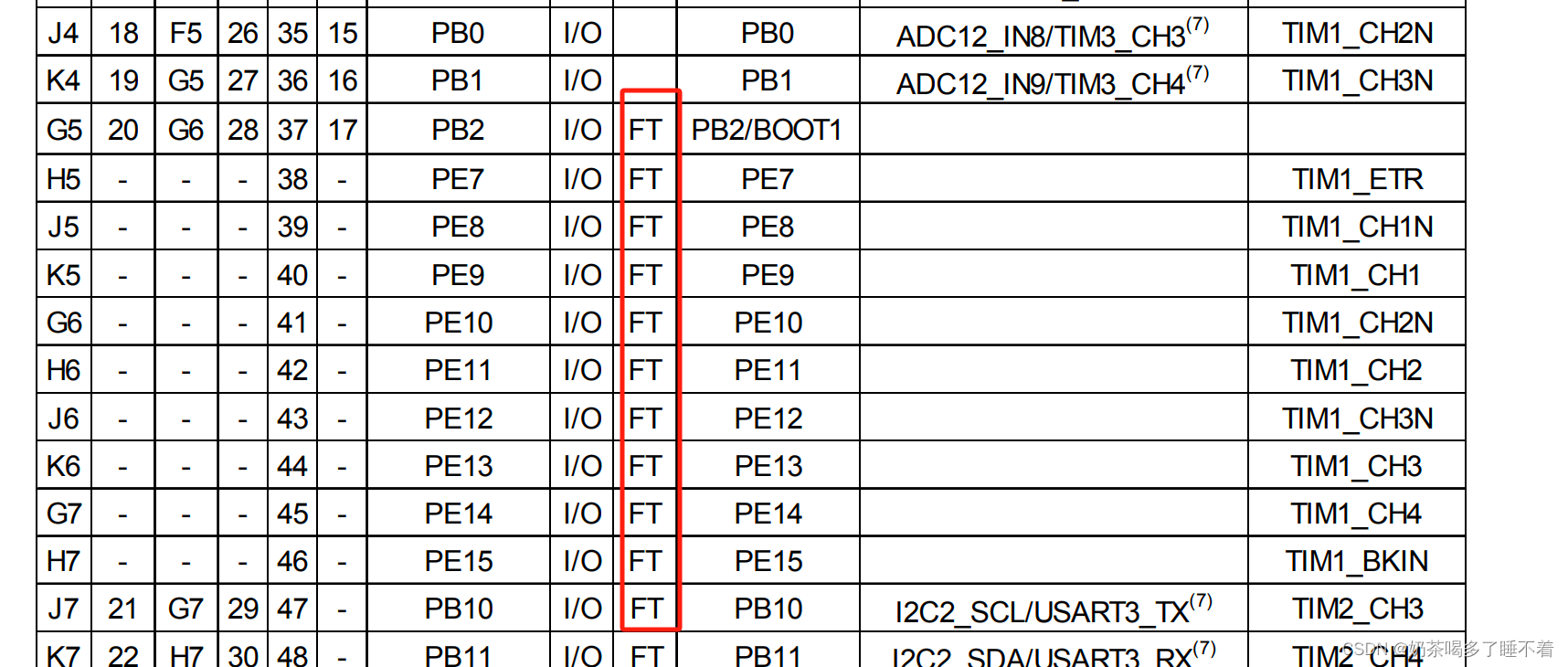
引脚电平:0~3.3v, 部分容忍5v(FT:数据手册里面的引脚定义)
时钟:APB2总线
引脚:0~15
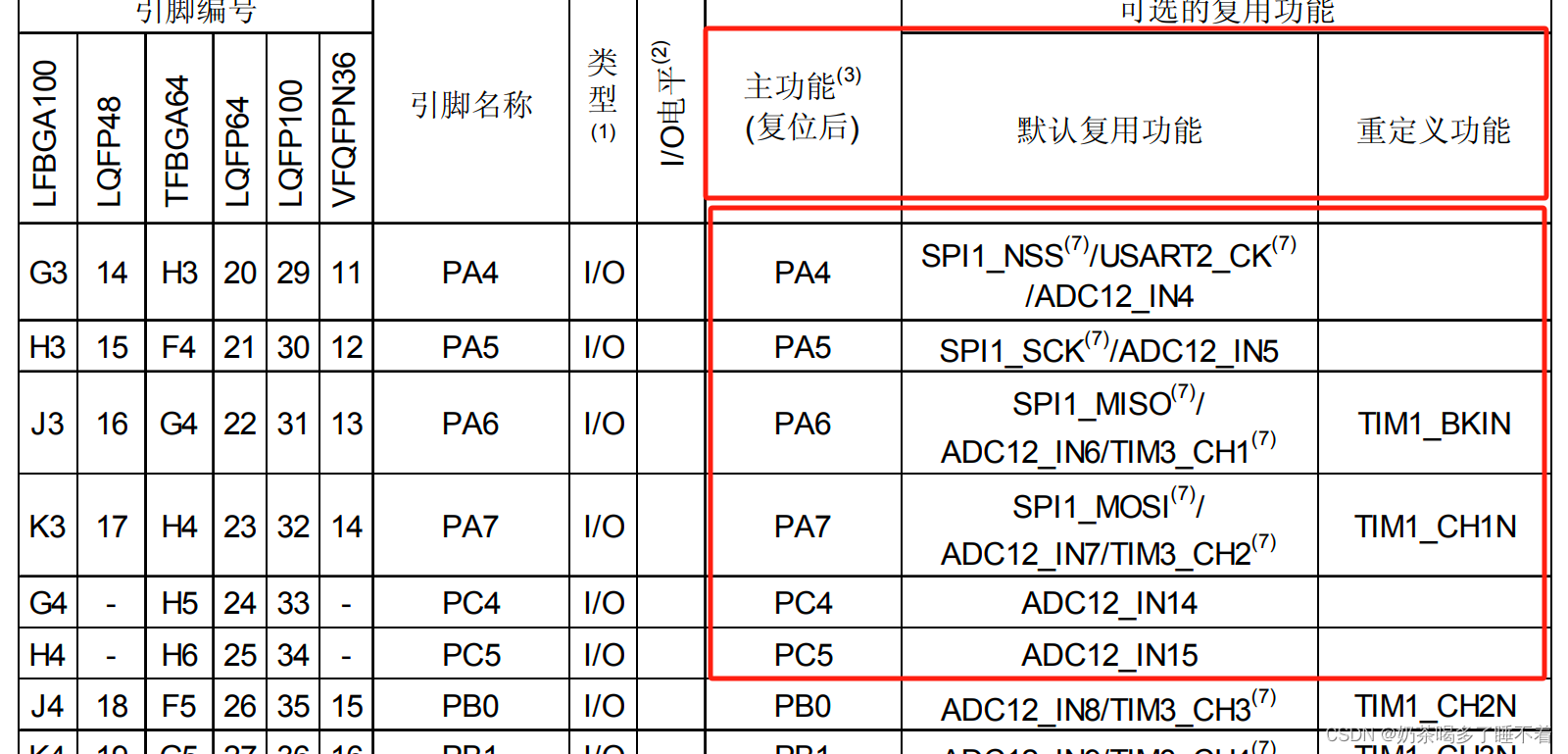
用途:1.普通IO口;
2.复用功能:ADC、EXIT、TIM、PWM、USART等协议;
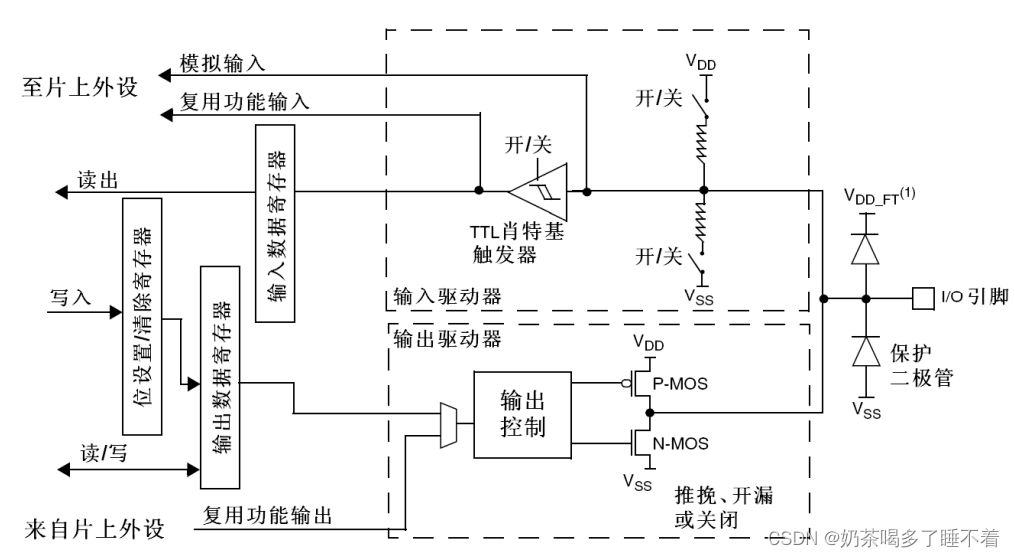
2.GPIO的基本结构
保护二极管:0~3.3v,超过这个区间,电流流过二极管,不过电路;
输入部分:1.VDD上拉电阻(高阻态),弱上拉;
2.VSS下拉电阻(高阻态),强下拉;
3.施密特触发器,高低两个阈值,大于高阈值为“1”,低于低阈值为“0”,高低阈值中间的无变化;
4.模拟输入,ADC ; 复用功能输入,USART_RX / EXIT;
5.输入数据寄存器,高16位“保存”,只用低16位;
输出部分: 1.输出数据寄存器,高16位“保存”,只用低16位;
2.复用功能输出,TIM / PWM / USART_TX;
3.推免模式,P_MOS开,N_MOS开,高/低电平都具有驱动能力;
4.开漏模式,P_MOS关,N_MOS开,高电平呈现高阻态, 低电平具有驱动能力;
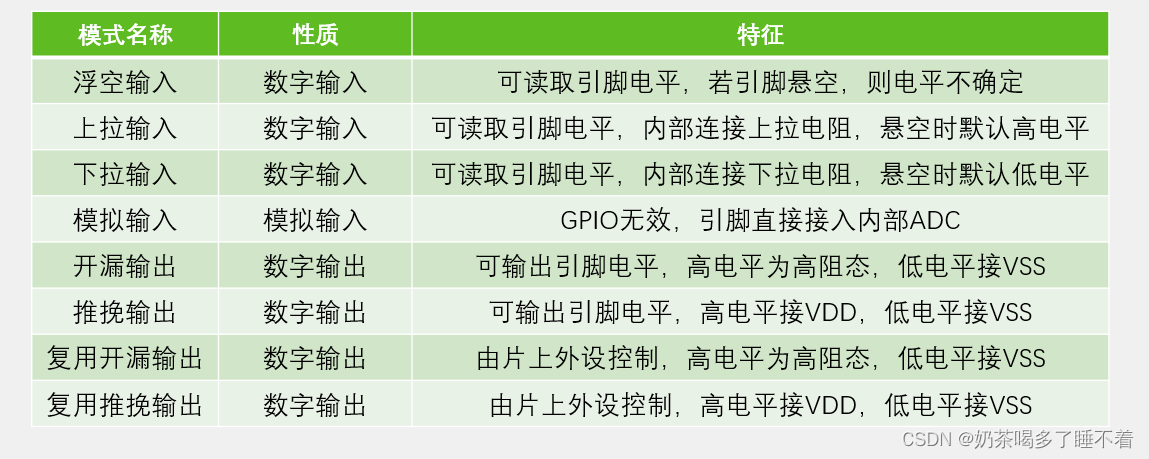
3.GPIO的8种模式
3)GPIO的代码实现
1.keilkill
处理中间文件,当你将代码发送给别人时,缩小文件大小

2.GPIO作为输出(推挽 / 开漏)
1.开启时钟 & 初始化GPIO结构体
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;//定义结构体变量
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //GPIO模式,赋值为推挽输出模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIO引脚,赋值为第0号引脚
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO速度,赋值为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //将赋值后的构体变量传递给GPIO_Init函数
//函数内部会自动根据结构体的参数配置相应寄存器
//实现GPIOA的初始化
2.输出赋值
/*具体IO口引脚的赋值*/
GPIO_ResetBits(GPIOA, GPIO_Pin_0);// 输出"0"
GPIO_SetBits(GPIOA, GPIO_Pin_0);// 输出"1"
GPIO_WriteBit(GPIOA, GPIO_Pin_0, Bit_RESET);// 输出"0"
GPIO_WriteBit(GPIOA, GPIO_Pin_0, Bit_SET);// 输出"1"
/*GPIOx_0~15同时赋值*/
GPIO_Write(GPIOA, 0x01);//操作的GPIOx->ODR = PortVal;
3.延时函数
放在System -> Delay.c/ Delay.h
#include "stm32f10x.h"
/**
* @brief 微秒级延时
* @param xus 延时时长,范围:0~233015
* @retval 无
*/
void Delay_us(uint32_t xus)
{
SysTick->LOAD = 72 * xus; //设置定时器重装值
SysTick->VAL = 0x00; //清空当前计数值
SysTick->CTRL = 0x00000005; //设置时钟源为HCLK,启动定时器
while(!(SysTick->CTRL & 0x00010000)); //等待计数到0
SysTick->CTRL = 0x00000004; //关闭定时器
}
/**
* @brief 毫秒级延时
* @param xms 延时时长,范围:0~4294967295
* @retval 无
*/
void Delay_ms(uint32_t xms)
{
while(xms--)
{
Delay_us(1000);
}
}
/**
* @brief 秒级延时
* @param xs 延时时长,范围:0~4294967295
* @retval 无
*/
void Delay_s(uint32_t xs)
{
while(xs--)
{
Delay_ms(1000);
}
}
3.C语言的数据类型
单片中通常存放整数,而不是 char 字符型,所以c语言和ST重新定义(typedef)了名字;

typedef unsigned char uint8_t;
typedef unsigned short int uint16_t;
typedef unsigned int uint32_t;
typedef uint32_t u32;//兼容老版本
typedef uint16_t u16;
typedef uint8_t u8;
4.GPIO作为输入(上拉 / 下拉 / 浮空 / 模拟)
1.开启时钟 & 初始化GPIO结构体
/*开启时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB1和PB11引脚初始化为上拉输入
2.输入读取
uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
uint16_t GPIO_ReadInputData(GPIO_TypeDef* GPIOx);
uint8_t GPIO_ReadOutputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
uint16_t GPIO_ReadOutputData(GPIO_TypeDef* GPIOx);
5.GPIO反转
//GPIO反转,用于点灯
void GPIO_Toggle(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{
/* Check the parameters */
assert_param(IS_GPIO_ALL_PERIPH(GPIOx));
assert_param(IS_GPIO_PIN(GPIO_Pin));
GPIOx->ODR ^= GPIO_Pin;
}
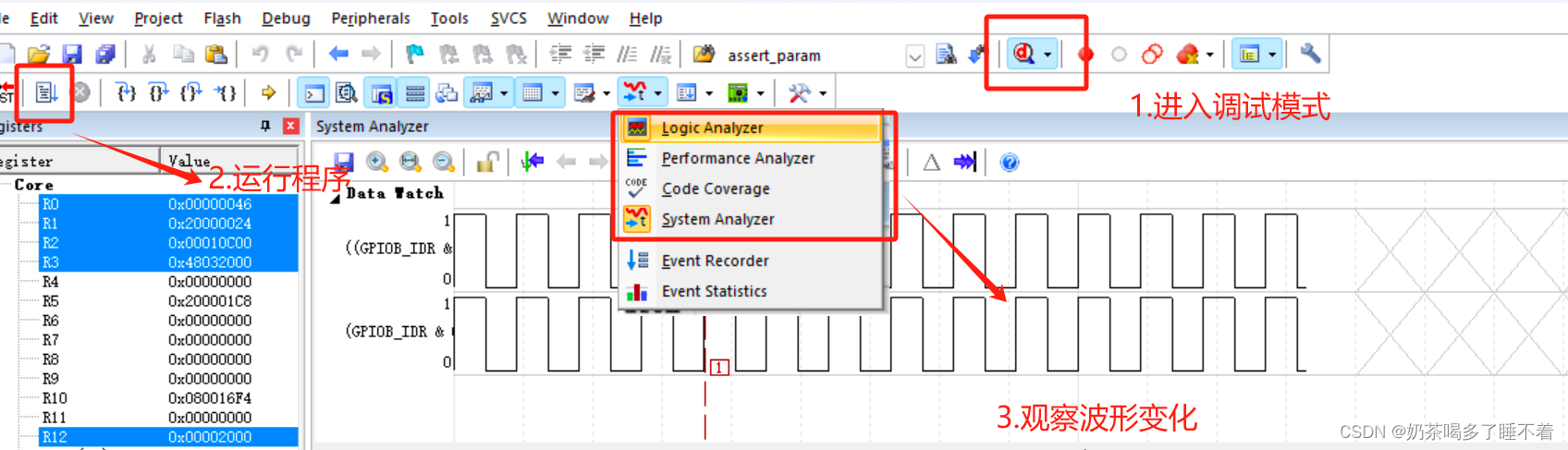
4)keil仿真
keil仿真之示波器的使用
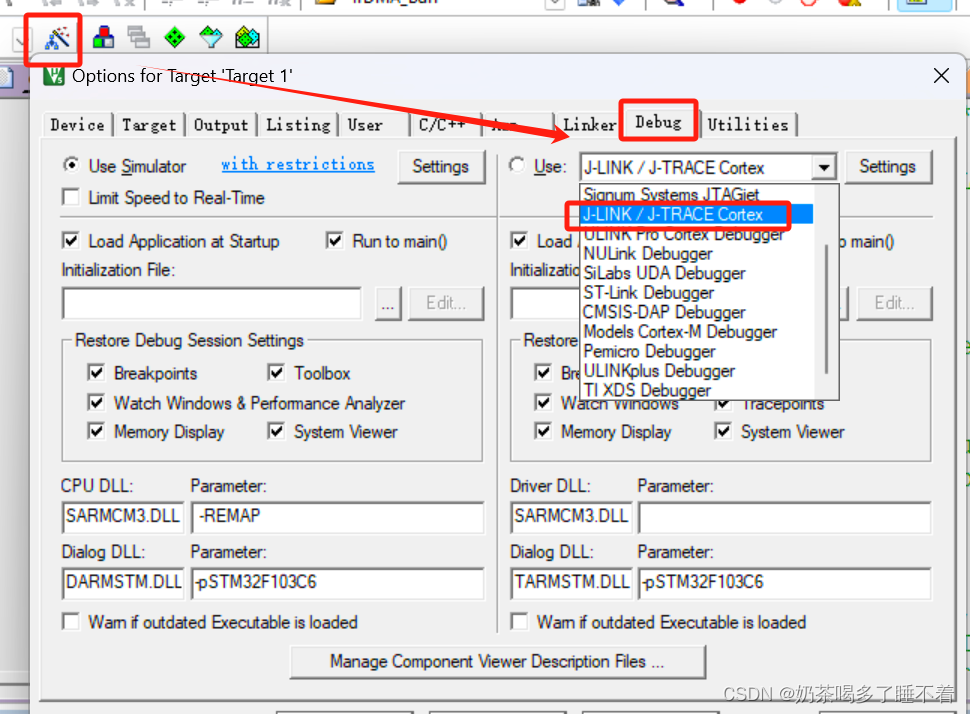
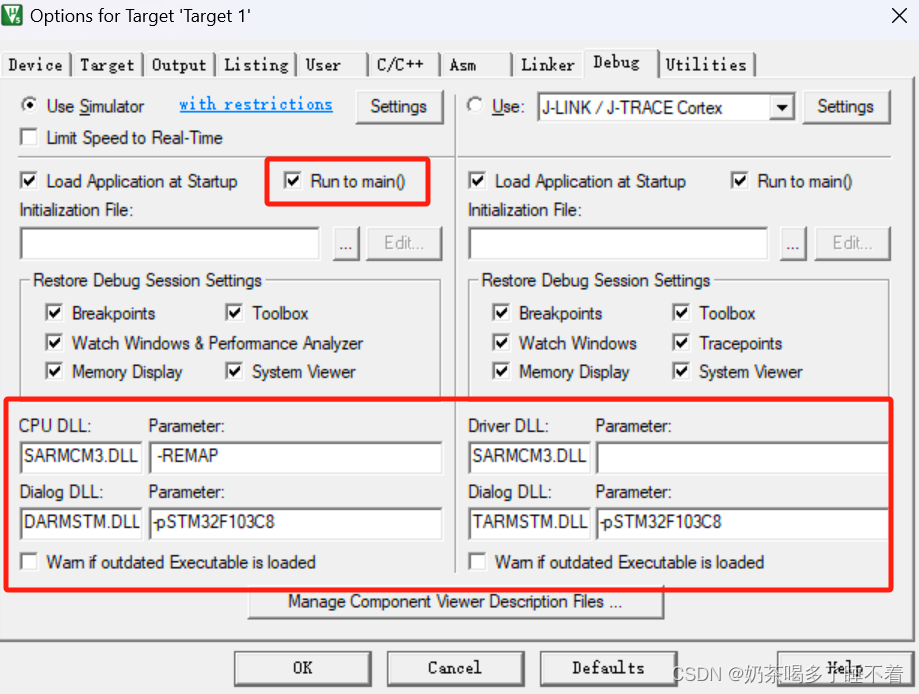
1.Debug的设置
SARMCM3.DLL
DARMSTM.DLL
TARMSTM.DLL
-pSTM32F103C8
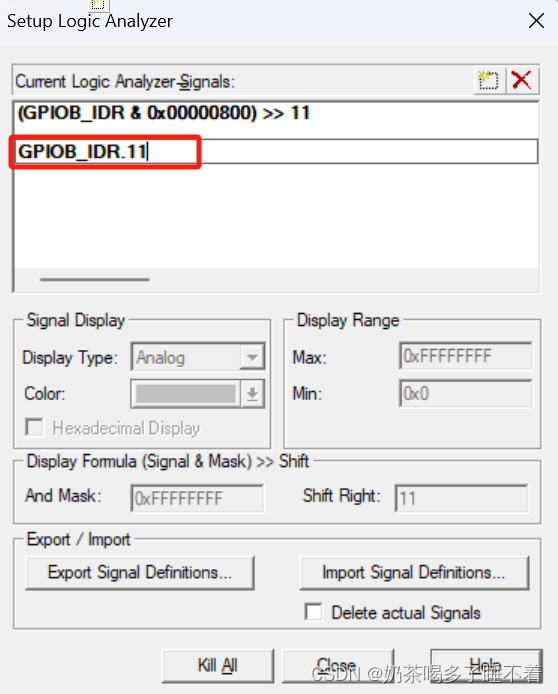
2.setup设置,仿真输出的引脚
GPIOB_IDR.11
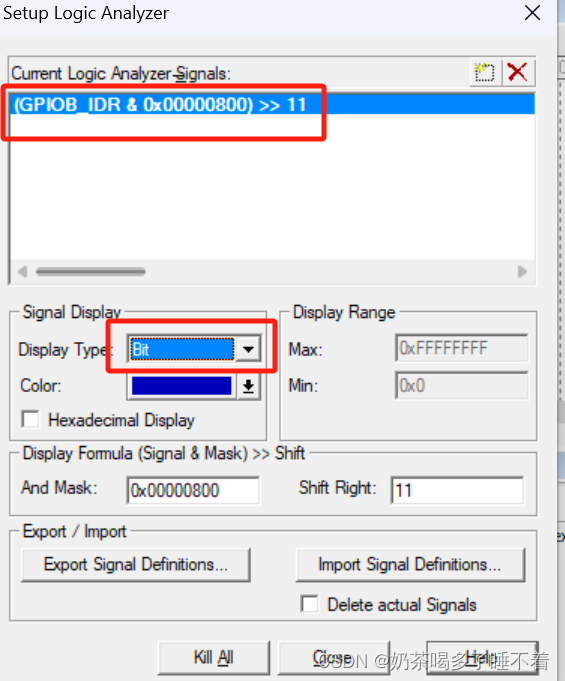
3.RUN