3.1 车辆横向运动学模型
注:上一篇博客讲解了车辆的纵向运动控制,这一篇博客将要讲解的是车辆的横向运动控制;横向运动控制主要是控制车辆一直保持在期望的轨迹上行驶(即通过打方向盘保证车辆的横向运动方向符合预期),同时要保证对车辆的横向控制(打方向盘的程度)满足车辆的动力学特性;
3.1.1 自行车模型
注:如果想控制车辆的运动,那首先要对车辆的运动建立一个数据化的模型,自行车模型是一个非常常见且简单的车辆模型,我们通过自行车模型,来建立车辆的横向运动控制模型(运动学模型)
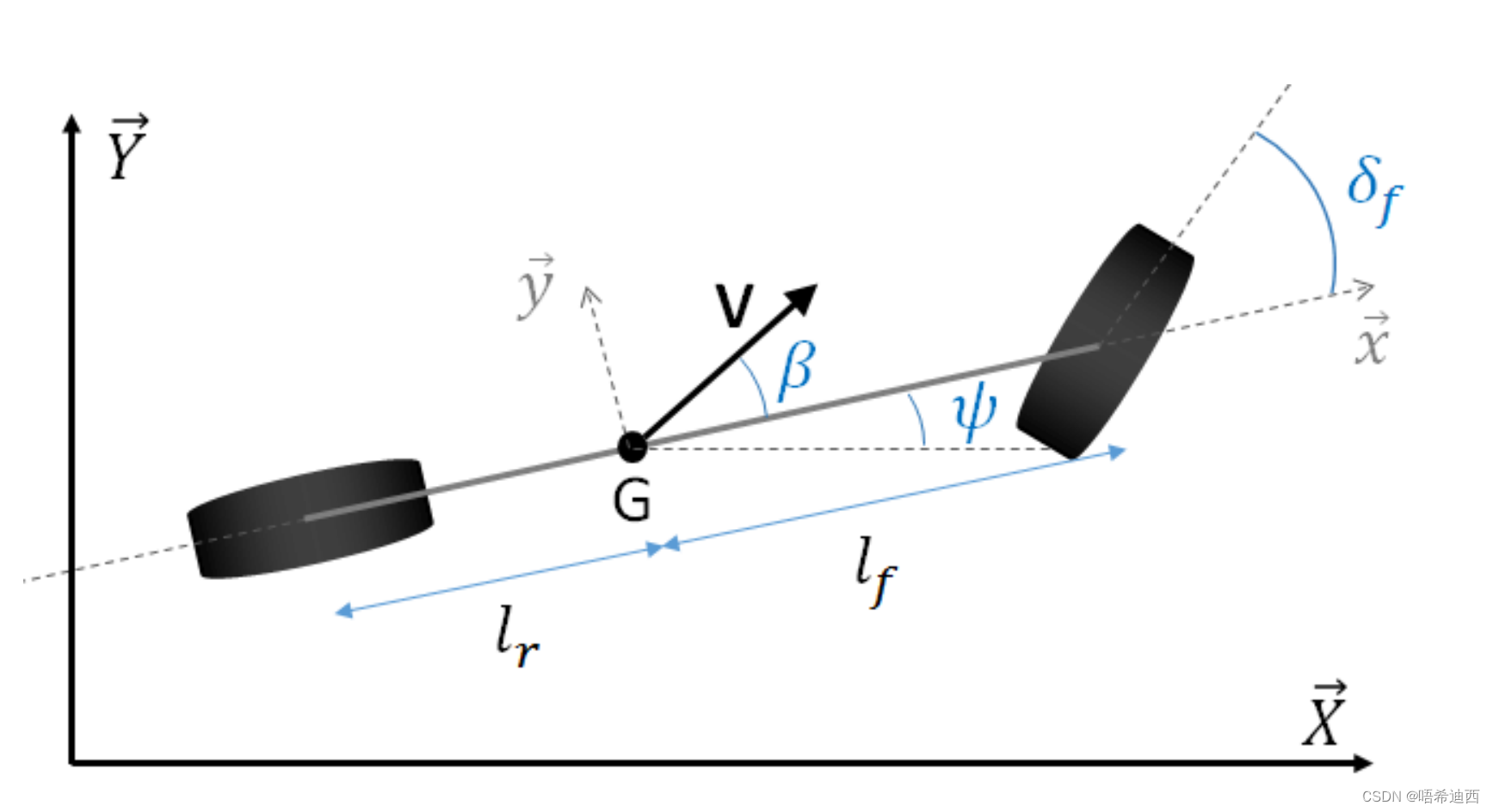
:车辆质心
:车辆纵向轴距(
为质心离前轮的轴距,
为质心离后轮的轴距)
:车辆的质心速度,代表车辆在行驶过程中的实际速度
:横摆角(车纵轴与X轴的夹角),代表车辆的行驶方向
:质心侧偏角(车纵轴与车速
:前轮转角(后轮转角
图中未体现)
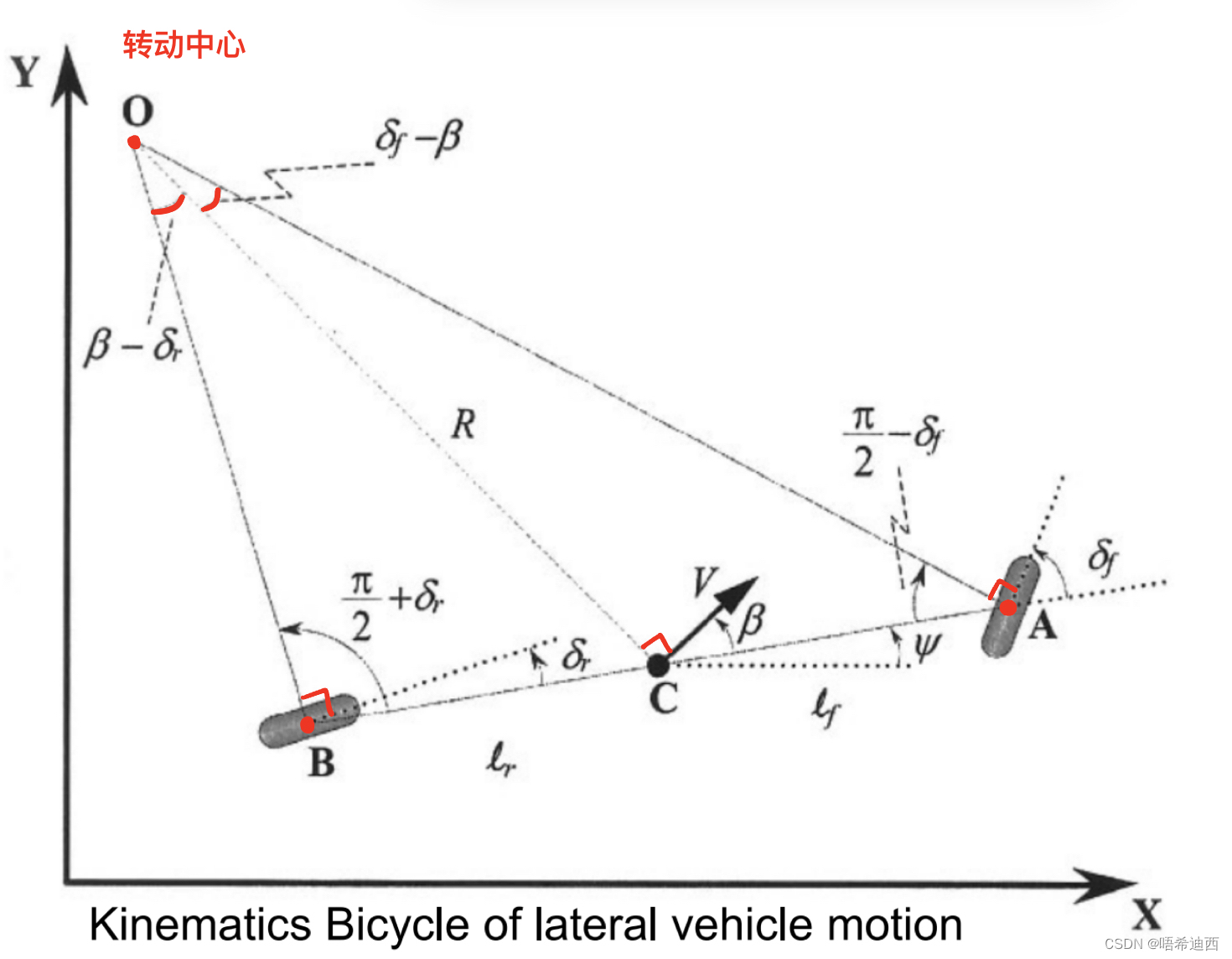
在通过自行车模型建立车辆运动学模型的时候,做出的假设:
- 忽略车辆在垂直方向(Z轴)上的运动,我们对车辆的描述是在一个二维平面上进行的;
- 假设车辆的两个前轮/两个后轮的转角和转速是相同的,这样我们可以将车辆的两个前轮/后轮用一个前轮/后轮来代替,因为两个前轮/后轮的性质是相同的,这样就可以将一个四轮车模型简化为一个两轮车模型;(而实际上两个轮胎的转角是不相同的)
- 忽略了轮胎受到的侧向力,即假设前轮转角
的方向是一致的,后轮也是这样;不过这个假设成立的条件为低速行驶,因为只有在低速行驶的时候,轮胎产生的侧向力很小可以忽略,所以可以大致认为前轮转角
- 假设车辆的行驶速度的变化也是缓慢的(即加速度很小),这样我们就可以忽略掉车辆前后轴的载荷转移;
- 假设整车以及悬架系统是刚性的,即车轮是没有滑移运动的,因此可以使用横摆角代表车辆的实际运动方向;
a
注:运动学模型仅在低速环境下有效(假设3),如果想要建立高速情况下的车辆横向控制模型,就必须考虑轮胎侧向力,这个时候需要使用车辆动力学模型;
a
总结:
- 低速行车使用运动学模型作为车辆的横向运动控制模型
- 高速行车使用动力学模型作为车辆的横向运动控制模型
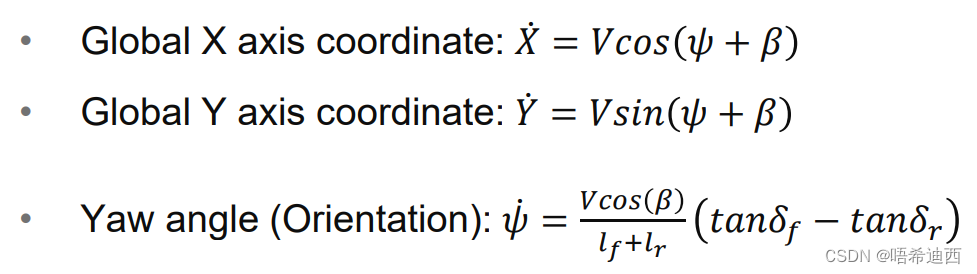
3.1.2 车辆的运动学模型
注1:车辆的运动学模型其实就是车辆的横向运动控制模型;
注2:运动学模型建立在大地坐标系(惯性系/绝对坐标系)中,所以我们将自行车模型也放进惯性系中进行分析;


最终得到运动学模型:(三个量:X轴车速,Y轴车速,车辆角速度)
注:
3.2 现代控制理论




![[嵌入式系统-71]:RT-Thread-组件:日志管理系统ulog,让运行过程可追溯](https://img-blog.csdnimg.cn/img_convert/c7f2bdb67226e6b4e8c94594751123f7.png)