文章目录
- 辐角原理(即Cauchy原理)
- 引理分析
- 辐角原理定义与证明
- 参考文献
为后续更好从频域层面分析控制系统的稳定性,本节首先介绍在后续分析中用到的辐角原理。
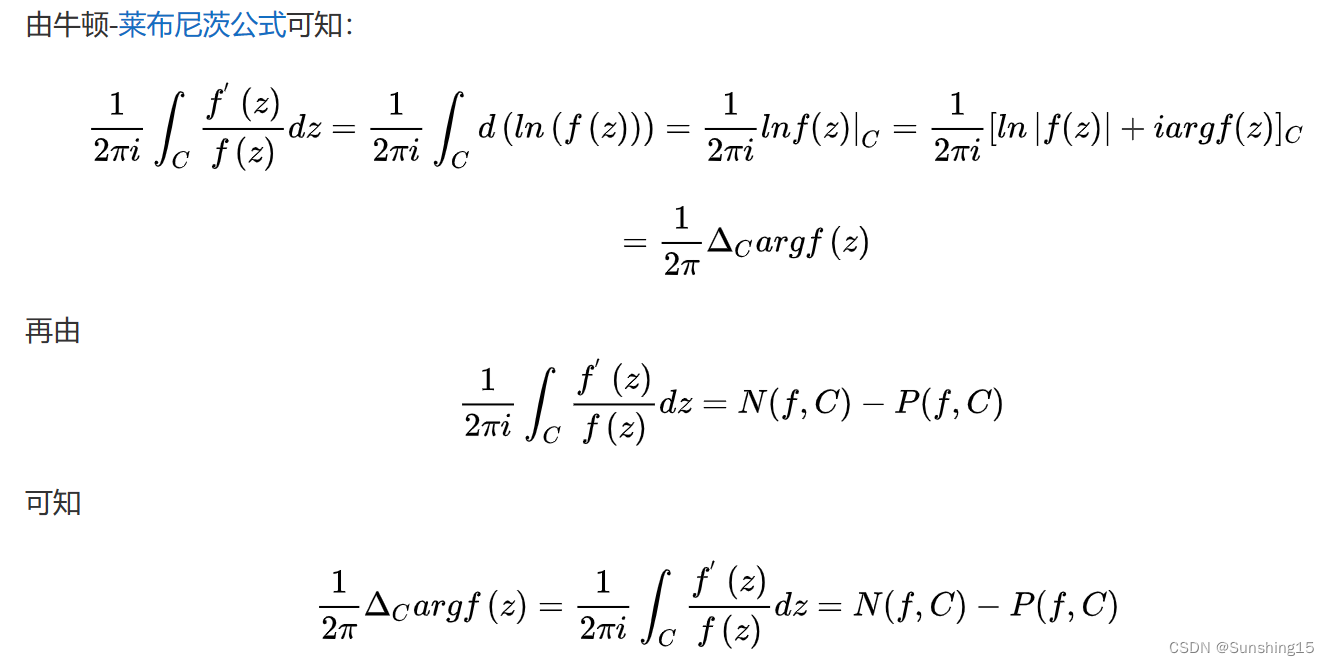
根据复变函数对数的定义,有 l n f ( s ) = l n ∣ f ( z ) ∣ + i ( a r g f ( z ) + 2 k π ) , k = 0 , ± 1 , ± 2 , … lnf(s)=ln|f(z)|+i(argf(z)+2k\pi), k = 0,\pm1, \pm2, \ldots lnf(s)=ln∣f(z)∣+i(argf(z)+2kπ),k=0,±1,±2,…
辐角原理(即Cauchy原理)
定义
1
2
π
i
∫
C
f
′
(
z
)
f
(
z
)
d
z
=
1
2
π
i
∫
C
d
(
l
n
(
f
(
z
)
)
)
(1)
\frac{1}{2\pi i}\int_C\frac{f^{'}(z)}{f(z)}dz=\frac{1}{2\pi i}\int_Cd(ln(f(z)))\tag{1}
2πi1∫Cf(z)f′(z)dz=2πi1∫Cd(ln(f(z)))(1) 为复变函数
f
(
z
)
f(z)
f(z) 的对数函数。
根据复变函数对数的定义可知
l
n
f
(
z
)
=
l
n
∣
f
(
z
)
∣
+
i
(
a
r
g
f
(
z
)
+
2
k
π
)
,
k
=
0
,
±
1
,
±
2
,
…
(2)
lnf(z)=ln|f(z)|+i(argf(z)+2k\pi), k=0,\pm1,\pm2,\ldots\tag{2}
lnf(z)=ln∣f(z)∣+i(argf(z)+2kπ),k=0,±1,±2,…(2)
引理 设 C C C 为一条闭曲线,若 f ( z ) f(z) f(z) 符合条件:
(1) f ( z ) f(z) f(z) 在 C C C 内部除可能的极点外解析,即 f ( z ) f(z) f(z) 为亚纯函数;
(2) f ( z ) f(z) f(z) 在 C C C 上解析且不为零,则有
1 2 π i ∫ C f ′ ( z ) f ( z ) d z = N ( f , C ) − P ( f , C ) , (3) \frac{1}{2\pi i}\int_C\frac{f^{'}(z)}{f(z)}dz=N(f,C)-P(f,C),\tag{3} 2πi1∫Cf(z)f′(z)dz=N(f,C)−P(f,C),(3)
其中 N ( f , C ) N(f,C) N(f,C), P ( f , C ) P(f,C) P(f,C) 分别表示 f ( z ) f(z) f(z) 在 C C C 的内部的零点和极点的个数(个数的计算包含零点或极点的重数)
引理分析
设
s
s
s 为复变量,
F
(
s
)
F(s)
F(s) 是有理式函数,设
F
(
s
)
=
k
(
s
−
z
1
)
(
s
−
z
2
)
…
(
s
−
z
m
)
(
s
−
p
1
)
(
s
−
p
2
)
…
(
s
−
p
n
)
,
F(s)=\frac{k(s-z_1)(s-z_2)\ldots(s-z_m)}{(s-p_1)(s-p_2)\ldots(s-p_n)},
F(s)=(s−p1)(s−p2)…(s−pn)k(s−z1)(s−z2)…(s−zm),其中
z
i
z_i
zi,
p
j
p_j
pj (
i
=
1
,
2
,
…
,
m
;
j
=
1
,
2
,
…
,
n
i=1,2,\ldots,m;j=1,2,\ldots,n
i=1,2,…,m;j=1,2,…,n)分别代表
F
(
s
)
F(s)
F(s) 的零点和极点。
假设复变量
s
s
s 变化,在
s
s
s 平面(自变量的复平面)中形成一条不通过
F
(
s
)
F(s)
F(s) 零极点的闭合路径
Γ
\Gamma
Γ,其通过
F
(
s
)
F(s)
F(s) 映射后得到对应的闭合曲线
Γ
F
\Gamma_F
ΓF(即闭合路径
Γ
\Gamma
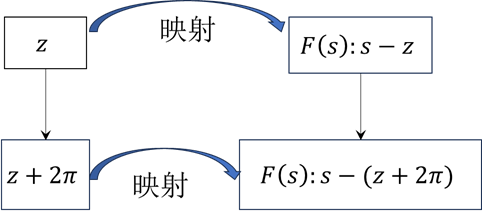
Γ 的像或映射)(如图一所示)
注意 此处需要注意的是在实数域上的映射关系是基于点的映射,因变量与自变量的关系可以直接通过横纵坐标轴表示。但在复数域上,任何一个变量均具有实部与虚部,变量的表示本身需要一个平面的坐标轴,其映射关系需要用到立体维度的空间来表示。
如图一为了更简便清晰表示复数域上的映射关系,使用自变量与因变量的坐标截面来表示定义在复数域上的映射关系。
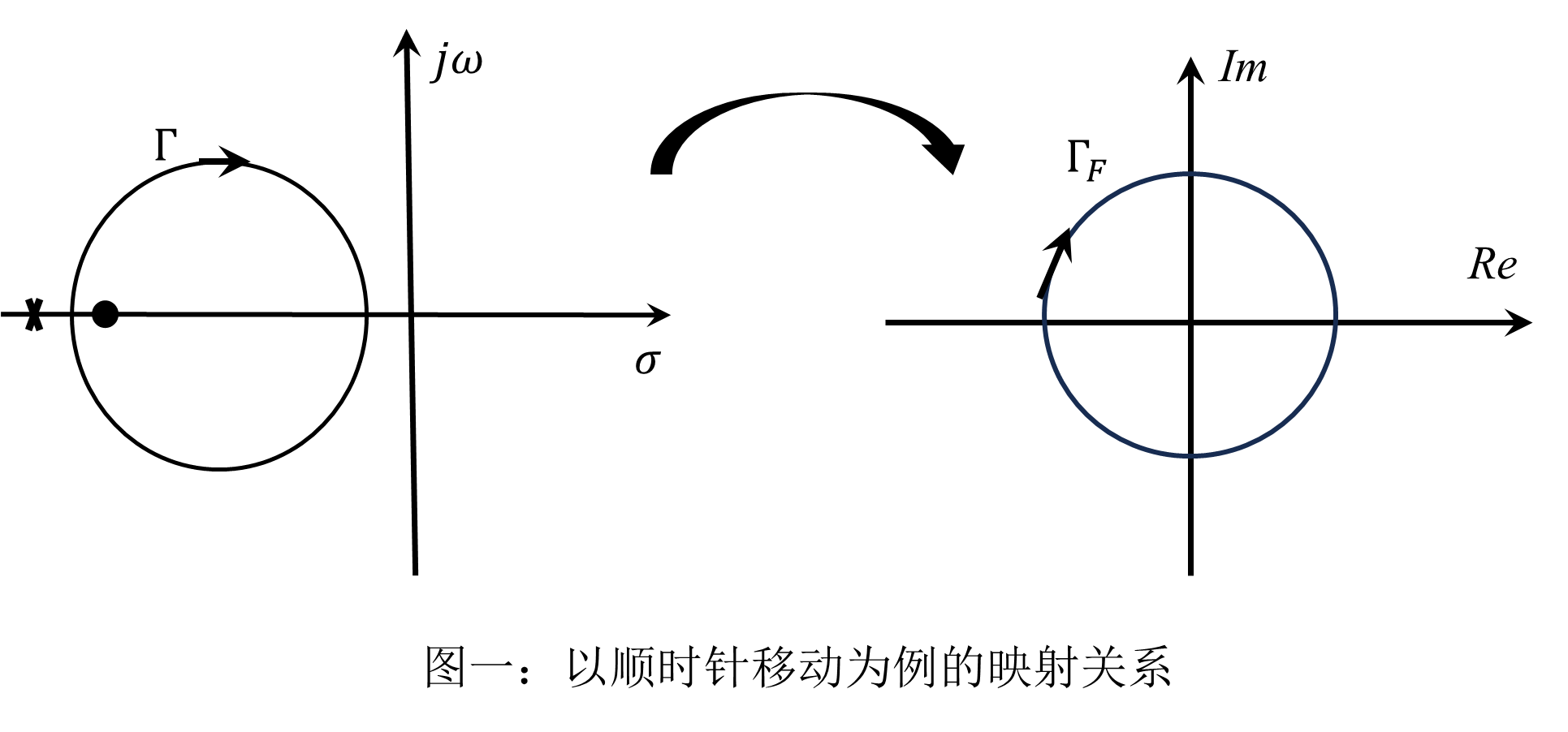
图一说明: 图中坐标轴上的×与●分别表示
F
(
s
)
F(s)
F(s) 的极点与零点。路径
Γ
\Gamma
Γ 包围一个零点。
图一中的移动中,被路径
Γ
\Gamma
Γ 包围的零点的坐标变换如下图所示:
~~~~~~~~~~~~~~~~~~
观察上图,当复变量
s
s
s沿路径
Γ
\Gamma
Γ 顺时针移动一周时,被包围的零点矢量 (
s
−
z
i
s-z_i
s−zi) 相角的变化为
−
2
π
-2\pi
−2π。极点矢量 (
s
−
p
j
s-p_j
s−pj) 位于分子位置,若其被路径
Γ
\Gamma
Γ顺时针移动时被包围,其相角的变化为
2
π
2\pi
2π。未被包围的零极点矢量其相角变化为0。且移动过程中复变函数的模不发生变化。以上图为例,路径
Γ
\Gamma
Γ包围一个零点,复变函数
F
(
s
)
F(s)
F(s) 的相角变化为
Δ
∠
F
(
s
)
=
Δ
[
∑
i
=
1
m
∠
(
s
−
z
i
)
−
∑
j
=
1
n
∠
(
s
−
p
j
)
]
=
Δ
∠
(
s
−
z
1
)
=
−
2
π
.
\Delta∠F(s)=\Delta[\sum_{i=1}^m∠(s-z_i)-\sum_{j=1}^{n}∠(s-p_j)]=\Delta∠(s-z_1)=-2\pi.
Δ∠F(s)=Δ[i=1∑m∠(s−zi)−j=1∑n∠(s−pj)]=Δ∠(s−z1)=−2π.即矢量
F
(
s
)
F(s)
F(s) 沿曲线
Γ
F
\Gamma_F
ΓF 绕原点顺时针转动了一圈。同理,若包围在路径
Γ
\Gamma
Γ 中的是
F
(
s
)
F(s)
F(s) 的一个极点,那么当
s
s
s 沿路径
Γ
\Gamma
Γ 顺时针转动一圈时,矢量
F
(
s
)
F(s)
F(s) 将沿曲线
Γ
F
\Gamma_F
ΓF绕坐标原点逆时针转动一圈。
则经以上分析,辐角原理可总结如下:
辐角原理定义与证明
辐角原理 设 D D D 为闭曲线 C C C 所围成的区域,若(1) f ( z ) f(z) f(z) 在区域 D D D 内除可能的极点外解析,即为亚纯函数;(2) f ( z ) f(z) f(z) 在 C C C 上解析且不为0,则 1 2 π Δ C a r g f ( z ) = 1 2 π i ∫ C f ′ ( z ) f ( z ) d z = N ( f , C ) − P ( f , C ) . \frac{1}{2\pi}\Delta_Cargf(z)=\frac{1}{2\pi i}\int_C\frac{f^{'}(z)}{f(z)}dz=N(f,C)-P(f,C). 2π1ΔCargf(z)=2πi1∫Cf(z)f′(z)dz=N(f,C)−P(f,C).即沿着闭曲线 C C C 正向绕行一周后辐角 a r g f ( z ) argf(z) argf(z) 的改变量 Δ C a r g f ( z ) \Delta_Cargf(z) ΔCargf(z)除以 2 π 2\pi 2π 等于 f ( z ) f(z) f(z) 在 C C C 的内部的零点和极点的个数的差值。
证明.
参考文献
[1] 复变函数在自动控制原理中的应用之Cauchy原理
[2] 辐角原理
[3] 杨贺菊,姚卫.复变函数 .清华大学出版社.2015