参数服务器在ROS中主要用于实现不同节点之间的数据共享。参数服务器相当于是独立于所有节点的一个公共容器,可以将数据存储在该容器中,被不同的节点调用,当然不同的节点也可以往其中存储数据。
参数服务器,一般适用于存在数据共享的一些应用场景。以共享的方式实现不同节点之间数据交互的通信模式。类似于全局变量。
一、参数操作C++
在 C++ 中实现参数服务器数据的增删改查,可以通过两套 API 实现:
-
ros::NodeHandle
-
ros::param
1.1 参数服务器新增(修改)参数
step1:创建功能包
step2:在src目录下,创建cpp文件

step3:编写代码
添加参数,可以通过ros::NodeHandle中的setParam函数实现,如下图所示。
![]()
第一个参数是,参数名;第二个参数是,参数值。
还可以通过ros::param中的set函数实现,如下图所示:
![]()
第一个参数是,参数名;第二个参数是,参数值。
注:修改参数也同样有两种方案,一个是ros::NodeHandle中的setParam函数、另一个是ros::param中的set函数。
step4:配置文件。打开对应功能包下的CMakeLists文件


step5:编译
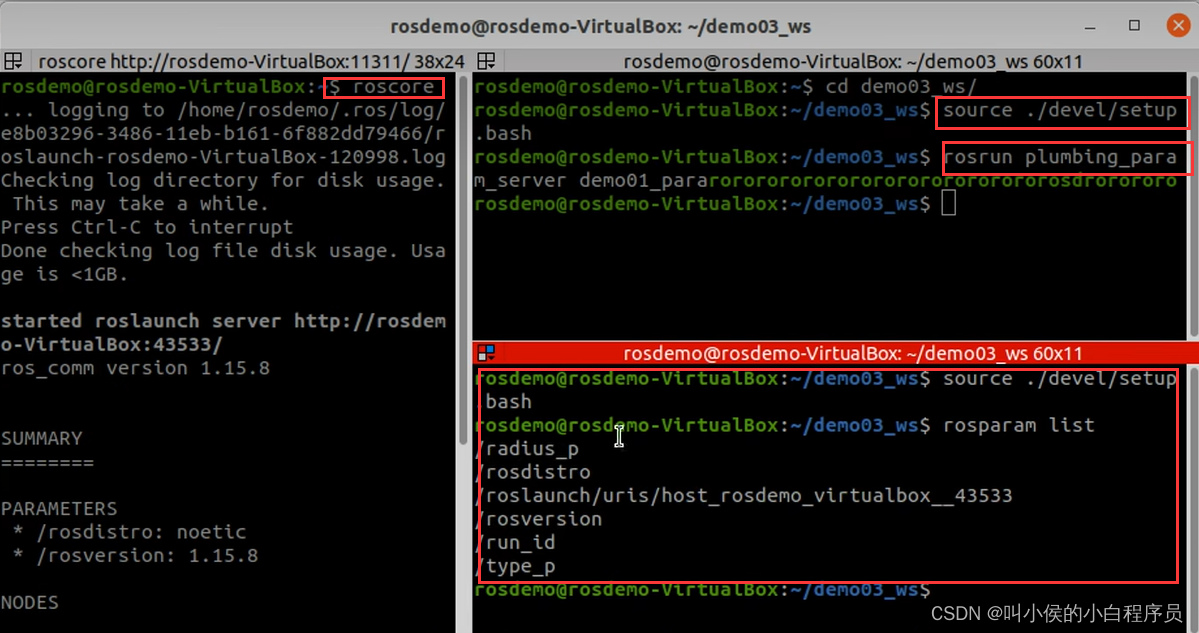
step6:启动核心+source+run节点
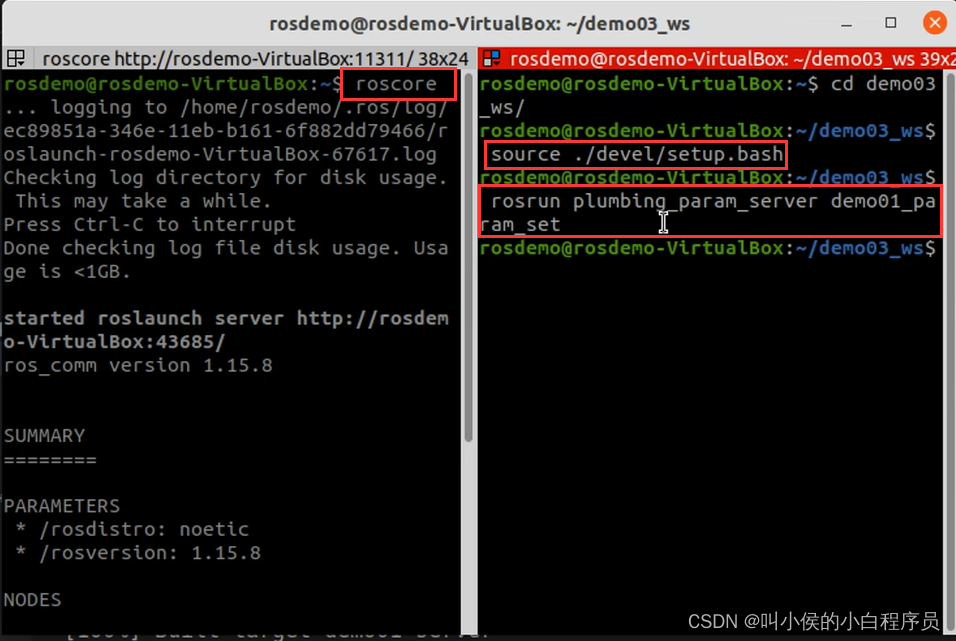
运行成功后,就设置好参数了。
step7:验证。另起一个终端,使用下述命令,列出参数服务器中的所有参数
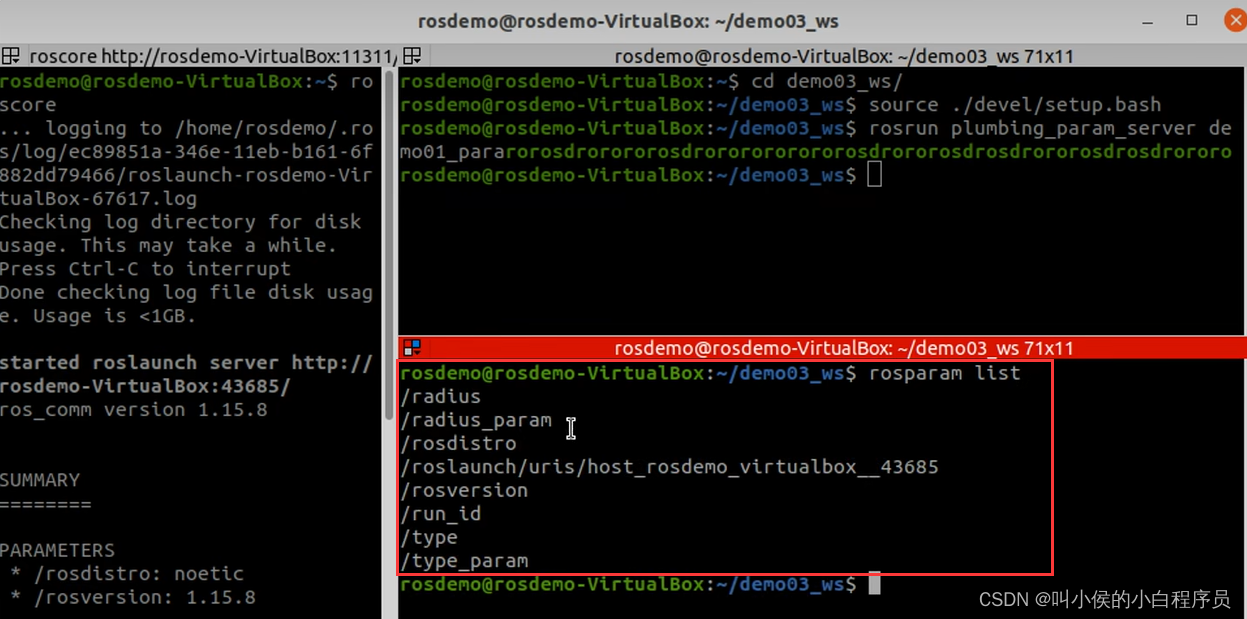
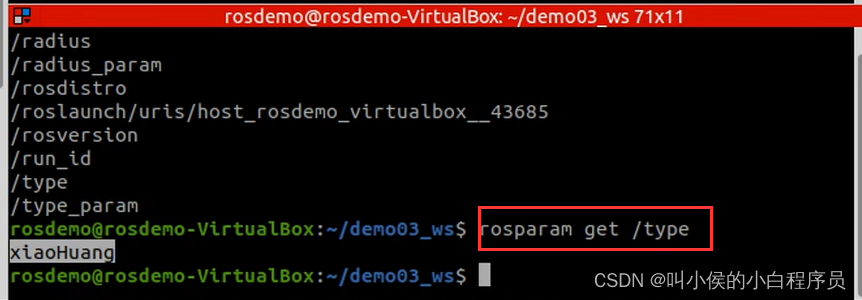
使用下图命令,可以查看对应参数中的数值。语法:rosparam get 想要查找的参数名
step8:参数的修改,方法和参数添加一样。
总体代码:
/*
在 roscpp 中提供了两套 API 实现参数操作
ros::NodeHandle
setParam("键",值)
ros::param
set("键","值")
示例:分别设置整形、浮点、字符串、bool、列表、字典等类型参数
修改(相同的键,不同的值)
*/
#include "ros/ros.h"
int main(int argc, char *argv[])
{
ros::init(argc,argv,"set_update_param");
std::vector<std::string> stus;
stus.push_back("zhangsan");
stus.push_back("李四");
stus.push_back("王五");
stus.push_back("孙大脑袋");
std::map<std::string,std::string> friends;
friends["guo"] = "huang";
friends["yuang"] = "xiao";
//参数增------------------------------------------------------------
//方案1:NodeHandle
ros::NodeHandle nh;
nh.setParam("nh_int",10); //整型
nh.setParam("nh_double",3.14); //浮点型
nh.setParam("nh_bool",true); //bool
nh.setParam("nh_string","hello NodeHandle"); //字符串
nh.setParam("nh_vector",stus); // vector
nh.setParam("nh_map",friends); // map
//方案2:ros::param
ros::param::set("param_int",20);
ros::param::set("param_double",3.14);
ros::param::set("param_string","Hello Param");
ros::param::set("param_bool",false);
ros::param::set("param_vector",stus);
ros::param::set("param_map",friends);
//参数修改------------------------------------------------------------
//方案1:NodeHandle。修改演示(相同的键,不同的值)
nh.setParam("nh_int",10000);
//方案2:ros::param
ros::param::set("param_int",20000);
return 0;
}1.2 参数服务器获取参数
step1:在1.1节创建的功能包中的src文件中,创建新的节点
step2:编写代码
参数服务器的各种操作,在roscpp中都提供了两套API实现:
1、ros::NodeHandle,可实现的操作如下:
- param(键,默认值)
存在,返回对应结果,否则返回默认值
- getParam(键,存储结果的变量)
存在,返回 true,且将值赋值给参数2
若键不存在,那么返回值为 false,且不为参数2赋值
- getParamCached键,存储结果的变量)--提高变量获取效率
存在,返回 true,且将值赋值给参数2
若键不存在,那么返回值为 false,且不为参数2赋值
- getParamNames(std::vector<std::string>)
获取所有的键,并存储在参数 vector 中
- hasParam(键)
是否包含某个键,存在返回 true,否则返回 false
- searchParam(参数1,参数2)
搜索键,参数1是被搜索的键,参数2存储搜索结果的变量
2、ros::param,可实现的操作和ros::NodeHandle差不多
总体代码:
#include "ros/ros.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
ros::init(argc,argv,"get_param");
//获取参数
//方式1:NodeHandle--------------------------------------------------------
/*
ros::NodeHandle nh;
// param 函数
int res1 = nh.param("nh_int",100); // 键存在
int res2 = nh.param("nh_int2",100); // 键不存在
ROS_INFO("param获取结果:%d,%d",res1,res2);
// getParam 函数
int nh_int_value;
double nh_double_value;
bool nh_bool_value;
std::string nh_string_value;
std::vector<std::string> stus;
std::map<std::string, std::string> friends;
nh.getParam("nh_int",nh_int_value);
nh.getParam("nh_double",nh_double_value);
nh.getParam("nh_bool",nh_bool_value);
nh.getParam("nh_string",nh_string_value);
nh.getParam("nh_vector",stus);
nh.getParam("nh_map",friends);
ROS_INFO("getParam获取的结果:%d,%.2f,%s,%d",
nh_int_value,
nh_double_value,
nh_string_value.c_str(),
nh_bool_value
);
for (auto &&stu : stus)
{
ROS_INFO("stus 元素:%s",stu.c_str());
}
for (auto &&f : friends)
{
ROS_INFO("map 元素:%s = %s",f.first.c_str(), f.second.c_str());
}
// getParamCached() 函数
nh.getParamCached("nh_int",nh_int_value);
ROS_INFO("通过缓存获取数据:%d",nh_int_value);
//getParamNames() 函数
std::vector<std::string> param_names1;
nh.getParamNames(param_names1);
for (auto &&name : param_names1)
{
ROS_INFO("名称解析name = %s",name.c_str());
}
ROS_INFO("存在 nh_int 吗? %d",nh.hasParam("nh_int"));
ROS_INFO("存在 nh_intttt 吗? %d",nh.hasParam("nh_intttt"));
std::string key;
nh.searchParam("nh_int",key);
ROS_INFO("搜索键:%s",key.c_str());
*/
//方式2:param--------------------------------------------------------
int res3 = ros::param::param("param_int",20); //存在
int res4 = ros::param::param("param_int2",20); // 不存在返回默认
ROS_INFO("param获取结果:%d,%d",res3,res4);
// getParam 函数
int param_int_value;
double param_double_value;
bool param_bool_value;
std::string param_string_value;
std::vector<std::string> param_stus;
std::map<std::string, std::string> param_friends;
ros::param::get("param_int",param_int_value);
ros::param::get("param_double",param_double_value);
ros::param::get("param_bool",param_bool_value);
ros::param::get("param_string",param_string_value);
ros::param::get("param_vector",param_stus);
ros::param::get("param_map",param_friends);
ROS_INFO("getParam获取的结果:%d,%.2f,%s,%d",
param_int_value,
param_double_value,
param_string_value.c_str(),
param_bool_value
);
for (auto &&stu : param_stus)
{
ROS_INFO("stus 元素:%s",stu.c_str());
}
for (auto &&f : param_friends)
{
ROS_INFO("map 元素:%s = %s",f.first.c_str(), f.second.c_str());
}
// getParamCached() 函数
ros::param::getCached("param_int",param_int_value);
ROS_INFO("通过缓存获取数据:%d",param_int_value);
//getParamNames() 函数
std::vector<std::string> param_names2;
ros::param::getParamNames(param_names2);
for (auto &&name : param_names2)
{
ROS_INFO("名称解析name = %s",name.c_str());
}
ROS_INFO("存在 param_int 吗? %d",ros::param::has("param_int"));
ROS_INFO("存在 param_intttt 吗? %d",ros::param::has("param_intttt"));
std::string key;
ros::param::search("param_int",key);
ROS_INFO("搜索键:%s",key.c_str());
return 0;
}step3:打开CMakeLists.txt文件,进行配置


step4:编译
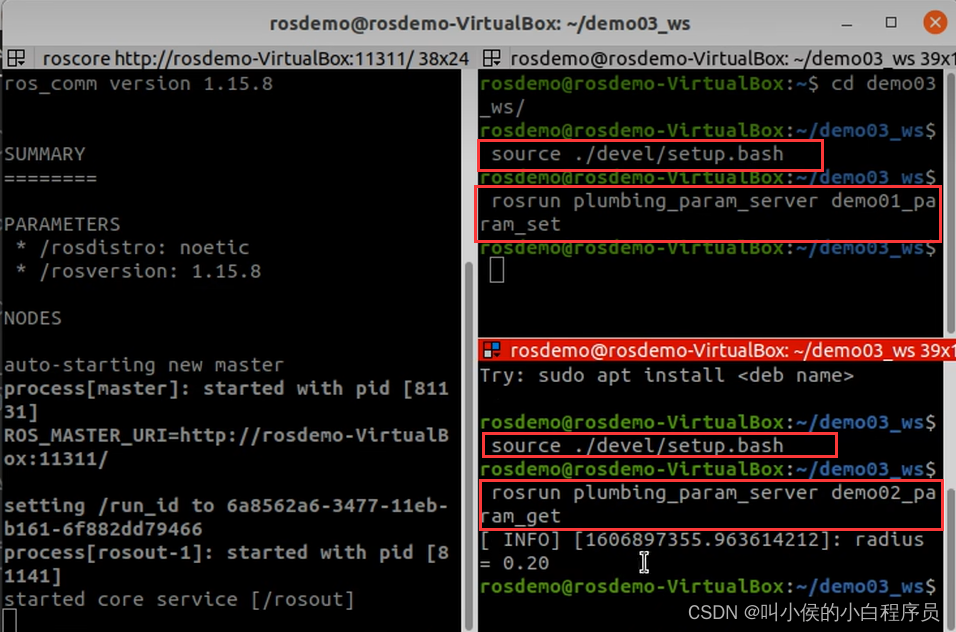
step5:启动ros核心+source+先运行1.1节设置参数的节点(保证参数是增添好的,这样才能进行查找操作)+运行1.2节查找参数的节点
1.3 参数服务器删除参数
step1:在1.1创建的功能包中的src文件中创建新的节点
step2:编写代码
/*
1、ros::NodeHandle
deleteParam("键")
根据键删除参数,删除成功,返回 true,否则(参数不存在),返回 false
2、ros::param
del("键")
根据键删除参数,删除成功,返回 true,否则(参数不存在),返回 false
*/
#include "ros/ros.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
ros::init(argc,argv,"delete_param");
//方法一:ros::NodeHandle----------------------
ros::NodeHandle nh;
bool r1 = nh.deleteParam("nh_int");
ROS_INFO("nh 删除结果:%d",r1);
//方法一:ros::param--------------------------
bool r2 = ros::param::del("param_int");
ROS_INFO("param 删除结果:%d",r2);
return 0;
}step3:打开CMakeLists.txt文件,进行配置


step4:编译
step5:启动ros核心+source+先运行1.1节设置参数的节点(保证参数是增添好的,这样才能进行删除操作)+运行1.3节删除参数的节点

二、参数操作Python
2.1 参数服务器新增(修改)参数
step1:在1.1创建的功能包中,创建scripts文件夹。在scripts中创建新的节点
step2:编程
在python中,参数服务器的操作只有一种方式:
#! /usr/bin/env python
import rospy
if __name__ == "__main__":
rospy.init_node("set_update_paramter_p")
# 设置各种类型参数
rospy.set_param("p_int",10)
rospy.set_param("p_double",3.14)
rospy.set_param("p_bool",True)
rospy.set_param("p_string","hello python")
rospy.set_param("p_list",["hello","haha","xixi"])
rospy.set_param("p_dict",{"name":"hulu","age":8})
# 修改(键一定要相同)
rospy.set_param("p_int",100)step3:给这个脚本添加可执行权限
step4:保存好之后,不用编译就可以运行啦。因为python脚本是可执行文件,不需要编译。
启动ros核心+source+运行
2.2 参数服务器获取参数
step1:在1.1创建的功能包中的scripts文件夹中创建新的节点
step2:编程
#! /usr/bin/env python
"""
参数服务器操作---查询:
get_param(键,默认值)
当键存在时,返回对应的值,如果不存在返回默认值
get_param_cached
get_param_names
has_param
search_param
"""
import rospy
if __name__ == "__main__":
rospy.init_node("get_param_p")
#获取参数
# get_param 函数
int_value = rospy.get_param("p_int",10000)
double_value = rospy.get_param("p_double")
bool_value = rospy.get_param("p_bool")
string_value = rospy.get_param("p_string")
p_list = rospy.get_param("p_list")
p_dict = rospy.get_param("p_dict")
rospy.loginfo("获取的数据:%d,%.2f,%d,%s",
int_value,
double_value,
bool_value,
string_value)
for ele in p_list:
rospy.loginfo("ele = %s", ele)
rospy.loginfo("name = %s, age = %d",p_dict["name"],p_dict["age"])
# get_param_cached 函数
int_cached = rospy.get_param_cached("p_int")
rospy.loginfo("缓存数据:%d",int_cached)
# get_param_names 函数
names = rospy.get_param_names()
for name in names:
rospy.loginfo("name = %s",name)
rospy.loginfo("-"*80)
# has_param 函数
flag = rospy.has_param("p_int")
rospy.loginfo("包含p_int吗?%d",flag)
# search_param 函数
key = rospy.search_param("p_int")
rospy.loginfo("搜索的键 = %s",key)step3:添加可执行权限
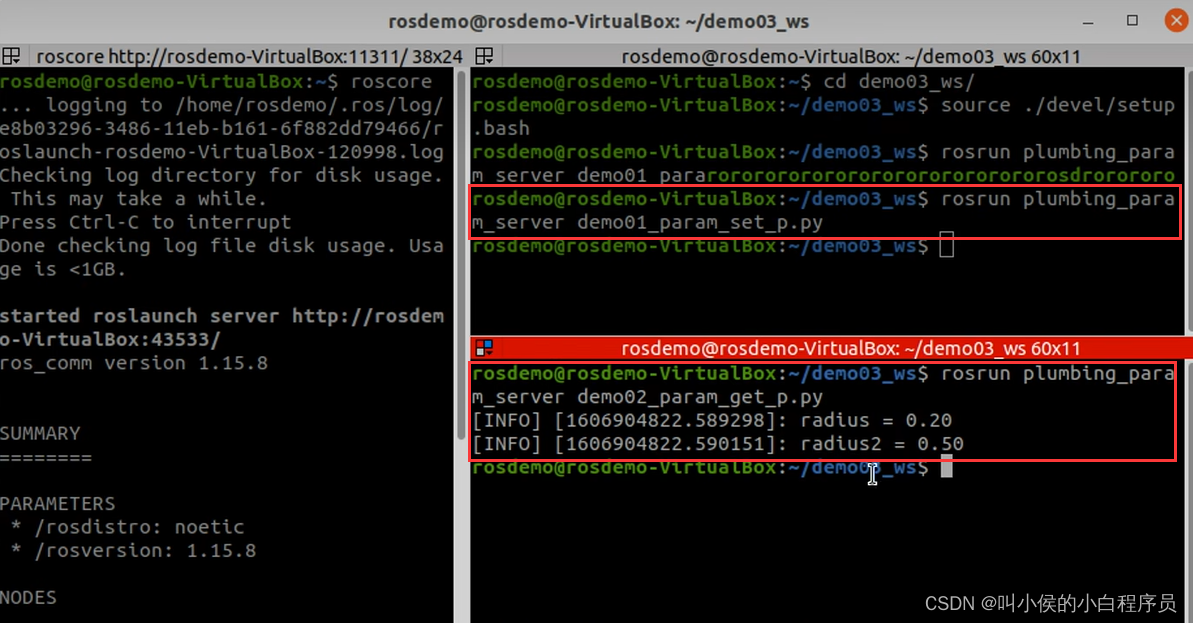
step4:启动ros核心+source+运行
2.3 参数服务器删除参数
同上
#! /usr/bin/env python
"""
rospy.delete_param("键")
键存在时,可以删除成功,键不存在时,会抛出异常
"""
import rospy
if __name__ == "__main__":
rospy.init_node("delete_param_p")
try:
rospy.delete_param("p_int")
except Exception as e:
rospy.loginfo("删除失败")