前言:该项目实际上是在很多基础的小练习上合成起来的,例如涉及到uart(rs232)的数据传输、双fifo流水线操作、VGA图像显示,本次内容在此基础上又增添了sobel算法,能实现图像的边沿监测并VGA显示。
文章目录
- 1.项目描述
- 2.sobel算法解析:
- 3.模块结构示意图:
- 4.sobel_ctrl模块设计
- 4.1波形设计
- 4.2代码
- 5.VGA_shift模块设计
- 5.1 显示效果示意图:
- 5.2 简易波形示意图:
- 5.3 代码
- 6.uart_rx模块设计(直接用之前的设计 略)
- 7.顶层设计
- 8.最终的显示效果:
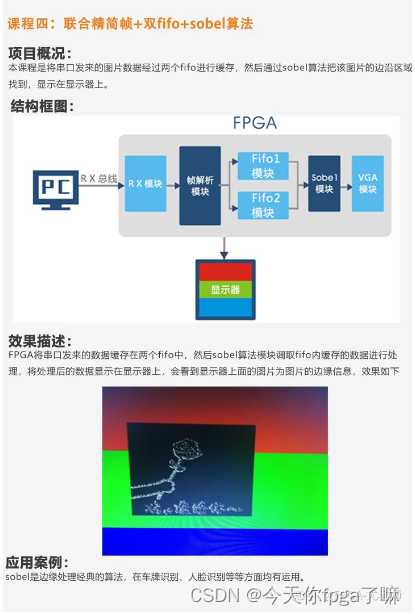
1.项目描述
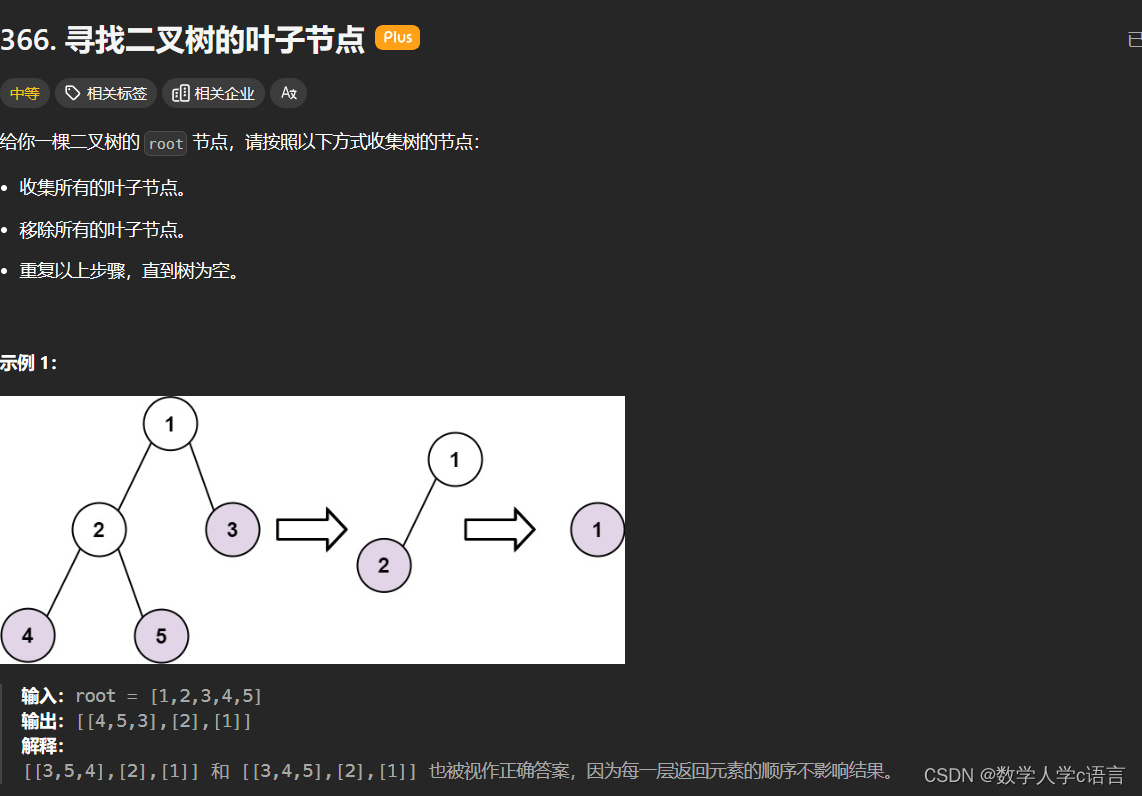
通过串口助手把 200 行 x200 列数据传入 FPGA,对应三行三列的九个数进行 sobel算法,把边缘检测的结果(198x198的数据)通过 vga 来显示,用两种颜色来区分是否是边界点(边界用白色显示,其他用黑色)。
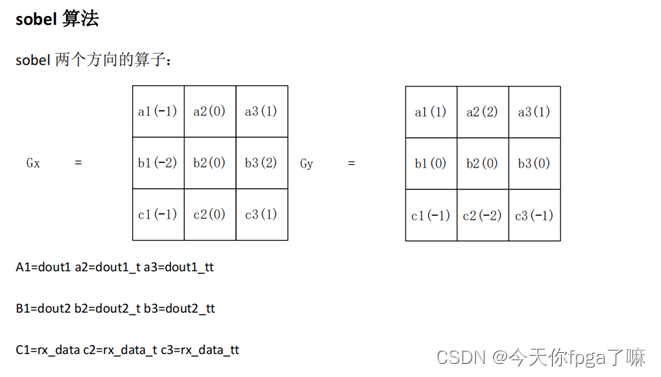
2.sobel算法解析:
-
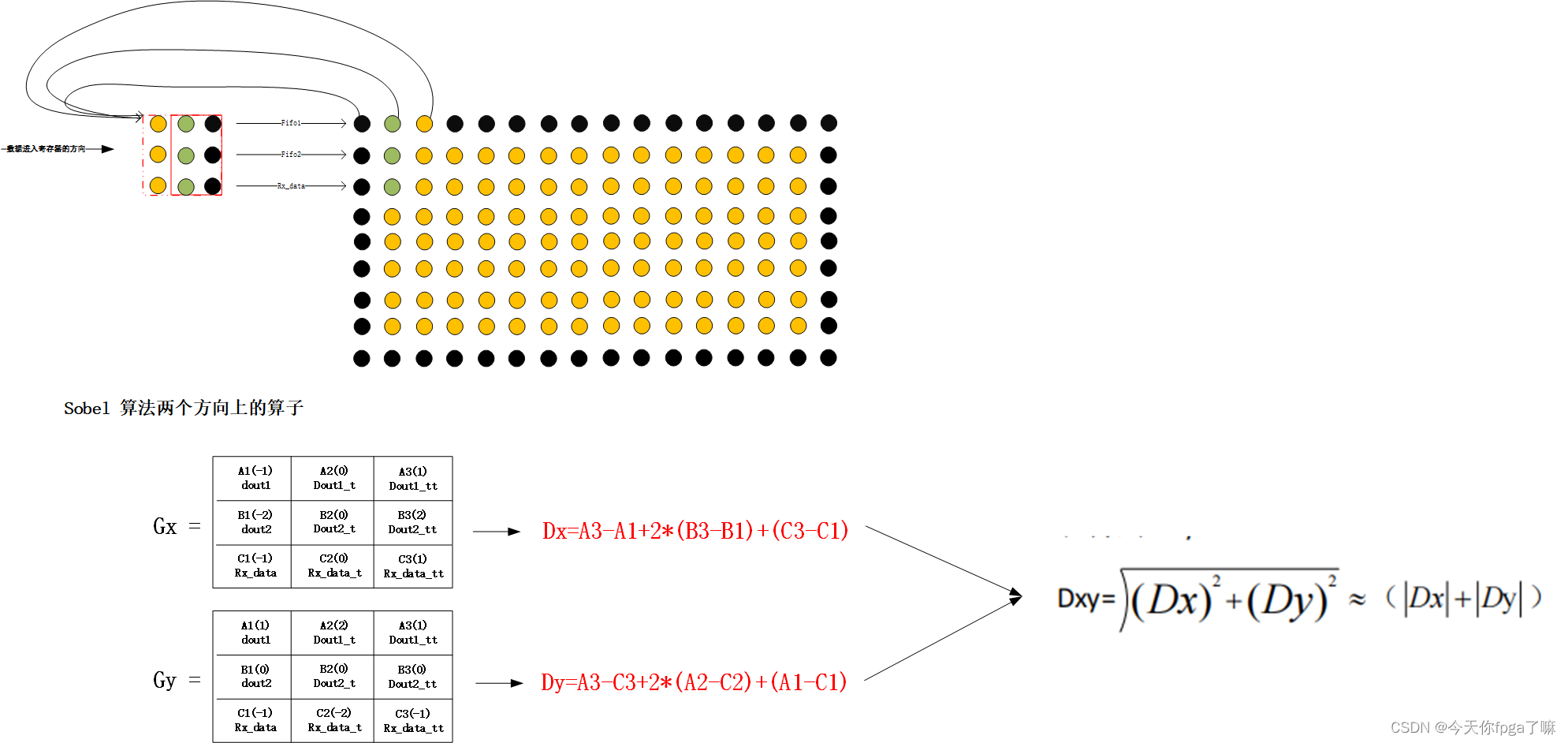
把图像每三行三列的数据分别乘上算子中对应位置的值再相加。然后进行如下运算,得到相应方向(x 和 y)的 Dx 和 Dy。
Dx=(a3-a1)+(b3-b1)*2+c3-c1;
Dy=(a1-c1)+(a2-c2)*2+a3-c3; -
对上面求得的 Dx 和 Dy 做平方和的平方根,再取近似值 Dx 和 Dy 的绝对值的和得到 Dxy:

-
如果 Dxy 的值大于一个阈值(这个阈值是多次尝试试出来的,本次项目中设置为5),表示该点为边界点,就让 VGA 显示一个白点,否则显示黑点。
-
把计算的结果通过 vga 显示,显示器会把是边界点的以白色像素显示,不是边界点的以黑色像素点显示,于是得到了一幅图像的轮廓
3.模块结构示意图:
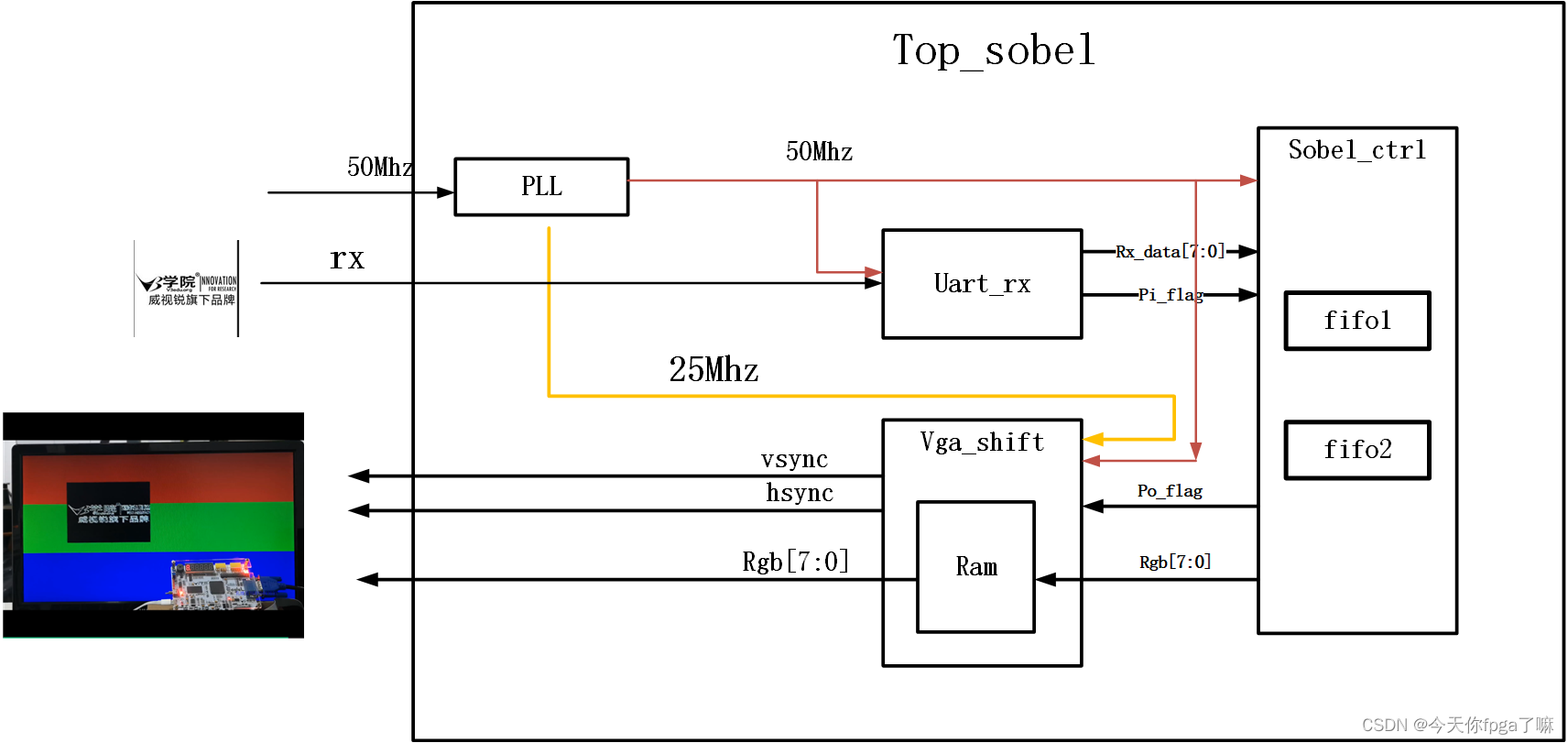
其中:
uart_rx模块在:手写一个uart协议——rs232
sobel_ctrl模块的核心是双fifo的流水线操作參考(需在此基础上进行改动):双fifo流水线操作
VGA_shift模块參考(原移动框为200x200这里变成198x198,且添加了ram方便rgb图像的存储与读取):VGA接口驱动与图像显示动态移动
4.sobel_ctrl模块设计
4.1波形设计
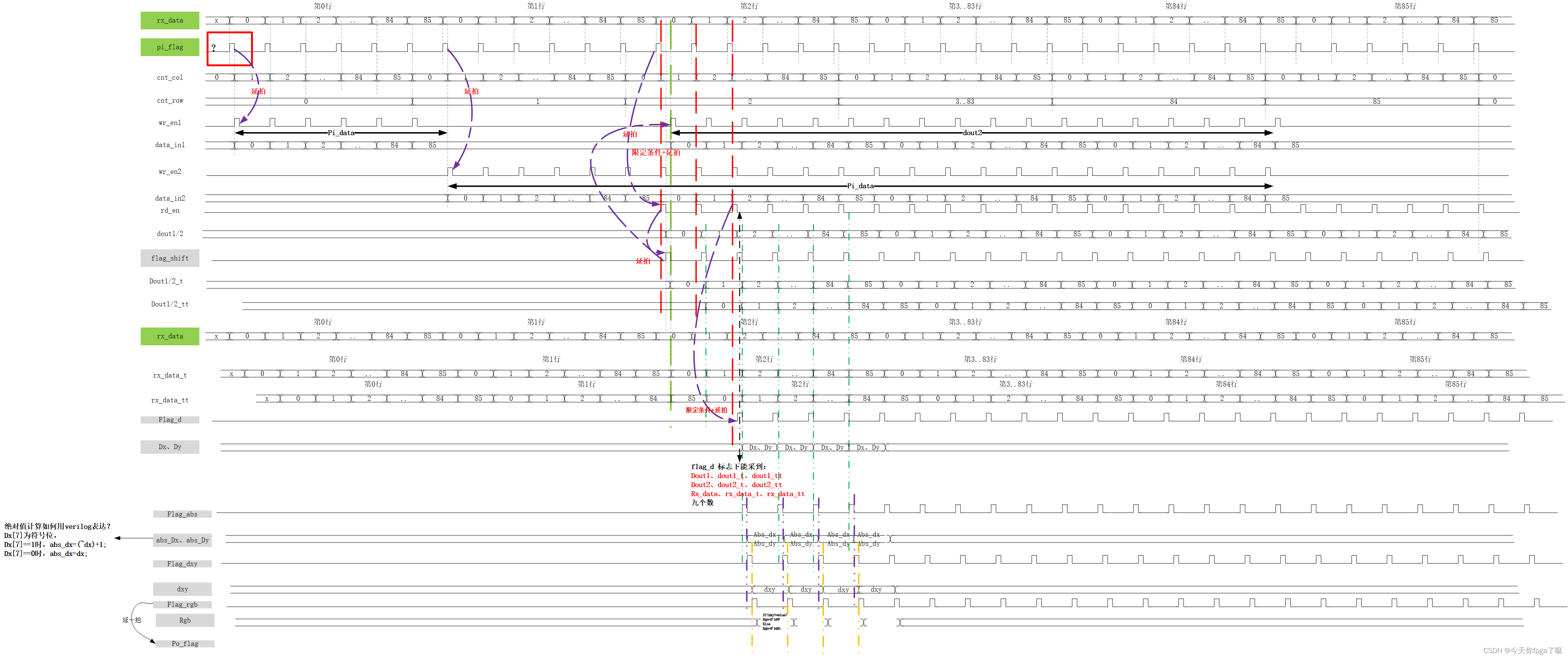
4.2代码
module sobel_ctrl(
input wire clk,
input wire rst,
input wire [7:0] rx_data,
input wire pi_flag,
output reg [7:0] rgb,
output reg po_flag
);
reg[9:0] cnt_col,cnt_row;
reg wr_en1_r,wr_en2_r;
wire wr_en1,wr_en2;
reg [7:0] data_in1_r;
wire [7:0] data_in1;
wire [7:0] dout1,dout2;
reg [7:0] dout1_t,dout1_tt,dout2_t,dout2_tt;
reg [7:0] rx_data_t,rx_data_tt;
reg rd_en_r;
wire rd_en;
reg shift_flag;
reg flag_d;
reg [7:0] Dx,Dy;
reg flag_abs,flag_dxy,flag_rgb;
reg [7:0] abs_dx,abs_dy;
reg [7:0] dxy;
parameter COL_MUX=199;
parameter ROW_MUX=199;
parameter VALUR=5; //不断调试得到一个合适的阈值
// cnt_col
always @(posedge clk) begin
if(rst==1'b1) begin
cnt_col <= 'd0;
end
else if (pi_flag==1'b1 && cnt_col==COL_MUX) begin
cnt_col<='d0;
end
else if (pi_flag==1'b1) begin
cnt_col<=cnt_col+1'b1;
end
end
// cnt_row
always @(posedge clk) begin
if(rst==1'b1) begin
cnt_row <= 'd0;
end
else if (cnt_row==ROW_MUX && pi_flag==1'b1 && cnt_col==COL_MUX) begin
cnt_row<='d0;
end
else if (pi_flag==1'b1 && cnt_col==COL_MUX) begin
cnt_row<=cnt_row+1'b1;
end
end
// wr_en1_r
assign wr_en1=wr_en1_r;
always @(posedge clk) begin
if(rst==1'b1) begin
wr_en1_r <= 'd0;
end
else if (cnt_row=='d0) begin
wr_en1_r<=pi_flag;
end
else if (cnt_row>'d1 && cnt_row<ROW_MUX) begin
wr_en1_r<=shift_flag;
end
end
// wr_en2_r
assign wr_en2=wr_en2_r;
always @(posedge clk) begin
if(rst==1'b1) begin
wr_en2_r <= 'd0;
end
else if (cnt_row>'d0 && cnt_row<ROW_MUX) begin
wr_en2_r<=pi_flag;
end
else
wr_en2_r<='d0;
end
// data_in1_r
assign data_in1=data_in1_r;
always @(posedge clk) begin
if(rst==1'b1) begin
data_in1_r<= 'd0;
end
else if (cnt_row=='d0) begin
data_in1_r<=rx_data;
end
else if (cnt_row>'d1 && cnt_row<ROW_MUX) begin
data_in1_r<=dout2;
end
end
// rd_en_r
assign rd_en=rd_en_r;
always @(posedge clk) begin
if(rst==1'b1) begin
rd_en_r<= 'd0;
end
else if (cnt_row>'d1) begin
rd_en_r<=pi_flag;
end
else
rd_en_r<='d0;
end
// shift_flag
always @(posedge clk) begin
if(rst==1'b1) begin
shift_flag <= 'd0;
end
else
shift_flag<=rd_en_r;
end
// dout1_t,dout1_tt,dout2_t,dout2_tt,rx_data_t,rx_data_tt
always @(posedge clk) begin
if (shift_flag==1'b1) begin
{dout1_tt,dout1_t}={dout1,dout1_t};
{dout2_tt,dout2_t}={dout2,dout2_t};
{rx_data_tt,rx_data_t}={rx_data_t,rx_data};
end
end
always @(posedge clk) begin
if(rst==1'b1) begin
flag_d <= 'd0;
end
else if (cnt_row>=2 && cnt_col>2) begin
flag_d<=rd_en_r;
end
end
always @(posedge clk) begin
if(rst==1'b1) begin
Dx <= 'd0;
Dy <= 'd0;
end
else if (flag_d==1'b1) begin
Dx<=(dout1_tt-dout1)+(dout2_tt-dout2)<<1+(rx_data_tt-rx_data);
Dy<=(dout1_tt-rx_data_tt)+(dout1_t-rx_data_t)<<1+(dout1-rx_data);
end
end
always @(posedge clk) begin
if (rst==1'b1) begin
flag_abs<='d0;
flag_dxy<='d0;
flag_rgb<='d0;
po_flag<='d0;
end
else
{po_flag,flag_rgb,flag_dxy,flag_abs}<={flag_rgb,flag_dxy,flag_abs,flag_d};
end
// abs_dx
always @(posedge clk) begin
if(rst==1'b1) begin
abs_dx<='d0;
end
else if (flag_abs==1'b1 ) begin
if (dx[7]==1'b1) begin
abs_dx<=(~Dx)+1'b1;
end
else
abs_dx<=Dx;
end
end
// abs_dy
always @(posedge clk) begin
if(rst==1'b1) begin
abs_dy <= 'd0;
end
else if (flag_abs==1'b1) begin
if (dy[7]==1'b1) begin
abs_dy<=(~Dy)+1'b1;
end
else
abs_dy<=Dy;
end
end
// dxy
always @(posedge clk) begin
if(rst==1'b1) begin
dxy<= 'd0;
end
else if (flag_dxy==1'b1) begin
dxy<=abs_dx+abs_dy;
end
end
// rgb
always @(posedge clk) begin
if(rst==1'b1) begin
rgb <= 'd0;
end
else if (flag_rgb==1'b1) begin
if (dxy>VALUR) begin
rgb<=8'hff;
end
else
rgb<=8'h00;
end
end
sfifo_8X256 sfifo1_8X256 (
.clk(clk), // input wire clk
.din(data_in1), // input wire [7 : 0] din
.wr_en(wr_en1), // input wire wr_en
.rd_en(rd_en), // input wire rd_en
.dout(dout1), // output wire [7 : 0] dout
.full(), // output wire full
.empty() // output wire empty
);
sfifo_8X256 sfifo2_8X256 (
.clk(clk), // input wire clk
.din(rx_data), // input wire [7 : 0] din
.wr_en(wr_en2), // input wire wr_en
.rd_en(rd_en), // input wire rd_en_r
.dout(dout2), // output wire [7 : 0] dout
.full(), // output wire full
.empty() // output wire empty
);
endmodule
5.VGA_shift模块设计
5.1 显示效果示意图:
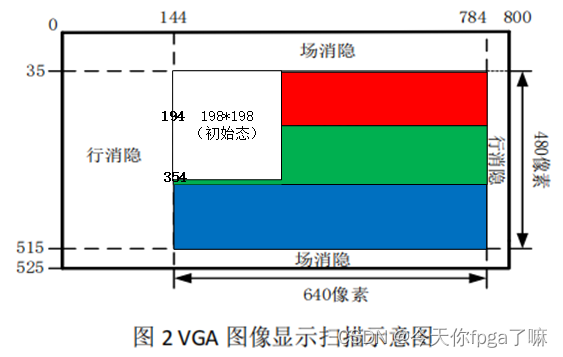
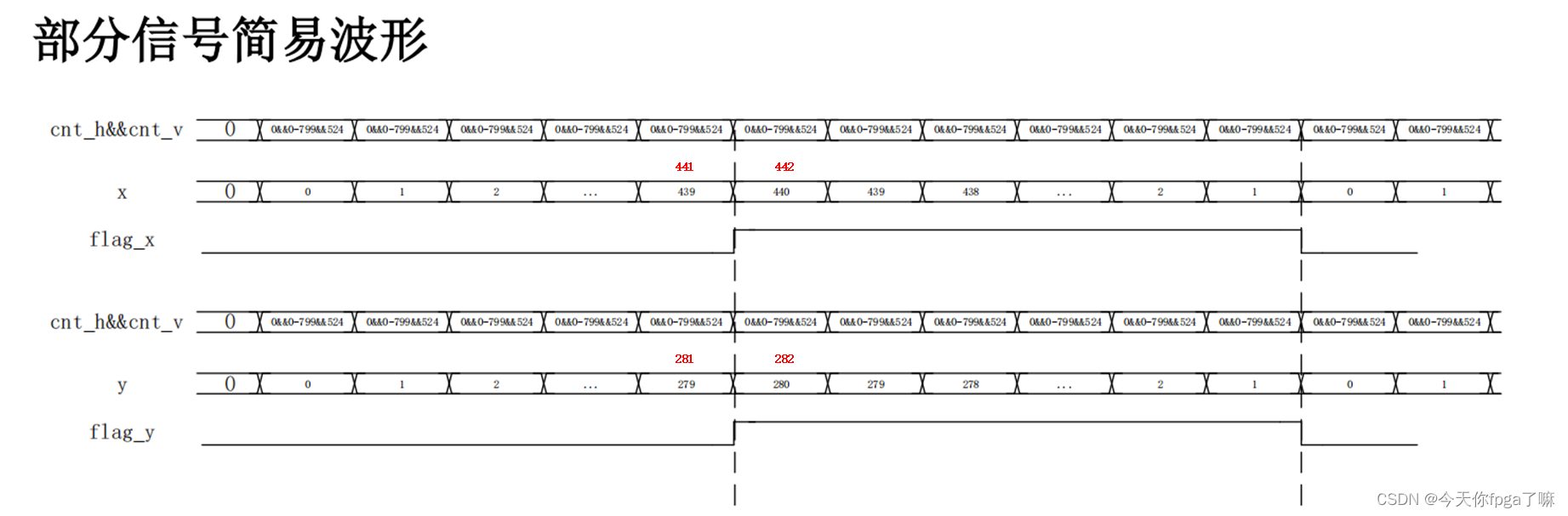
5.2 简易波形示意图:
5.3 代码
module vga_shift(
input wire sclk,//50mhz
input wire clk_25,
input wire rst,
input wire [7:0] rgb_in,
input wire pi_flag,
output reg hsync,
output reg vsync,
output reg [7:0] rgb
);
parameter HSYNC_END=95;
parameter CNT_H_END=799;
parameter VSYNC_END=1;
parameter CNT_V_END=524;
parameter RED=8'b11100000;
parameter GREEN=8'b00011100;
parameter BLUE=8'b00000011;
parameter WHITE=8'b11111111;
parameter ADDR_MUX=16'd39203;
reg [9:0] cnt_h;
reg [9:0] cnt_v;
reg [8:0] x;
reg [8:0] y;
reg flag_x;
reg flag_y;
reg [15:0] addra,addrb;
wire [7:0] doutb;
// cnt_h
always @(posedge clk_25) begin
if(rst==1'b1) begin
cnt_h<= 'd0;
end
else if (cnt_h==CNT_H_END) begin
cnt_h<='d0;
end
else
cnt_h<=cnt_h+1'b1;
end
// hsync
always @(posedge clk_25) begin
if(rst==1'b1) begin
hsync<= 'd1;
end
else if (cnt_h==CNT_H_END) begin
hsync<='d1;
end
else if (cnt_h==HSYNC_END) begin
hsync<='d0;
end
end
// cnt_v
always @(posedge clk_25) begin
if(rst==1'b1) begin
cnt_v <= 'd0;
end
else if (cnt_v==CNT_V_END && cnt_h==CNT_H_END) begin
cnt_v<='d0;
end
else if (cnt_h==CNT_H_END) begin
cnt_v<=cnt_v+1'b1;
end
end
// vsync
always @(posedge clk_25) begin
if(rst==1'b1) begin
vsync <= 'd1;
end
else if (cnt_v==VSYNC_END && cnt_h==CNT_H_END) begin
vsync<='d0;
end
else if (cnt_v==CNT_V_END && cnt_h==CNT_H_END) begin
vsync<='d1;
end
end
// x
always @(posedge clk_25) begin
if(rst==1'b1) begin
x <= 'd0;
end
else if (cnt_h==CNT_H_END && cnt_v==CNT_V_END && flag_x=='d0) begin
x<=x+1'b1;
end
else if (cnt_h==CNT_H_END && cnt_v==CNT_V_END && flag_x=='d1) begin
x<=x-1'b1;
end
end
// flag_x
always @(posedge clk_25) begin
if(rst==1'b1) begin
flag_x<= 'd0;
end
else if (cnt_h==CNT_H_END && cnt_v==CNT_V_END && x=='d441 && flag_x=='d0) begin
flag_x<='d1;
end
else if (cnt_h==CNT_H_END && cnt_v==CNT_V_END && x=='d1 && flag_x=='d1) begin
flag_x<='d0;
end
end
//y
always @(posedge clk_25) begin
if(rst==1'b1) begin
y<= 'd0;
end
else if (cnt_h==CNT_H_END && cnt_v==CNT_V_END && flag_y=='d0) begin
y<=y+1'b1;
end
else if (cnt_h==CNT_H_END && cnt_v==CNT_V_END && flag_y=='d1) begin
y<=y-1'b1;
end
end
// flag_y
always @(posedge clk_25) begin
if(rst==1'b1) begin
flag_y <= 'd0;
end
else if (cnt_h==CNT_H_END && cnt_v==CNT_V_END && y=='d281 && flag_y<='d0) begin
flag_y<='d1;
end
else if (cnt_h==CNT_H_END && cnt_v==CNT_V_END && y=='d1 && flag_y<='d1) begin
flag_y<='d0;
end
end
// rgb
always @(posedge clk_25) begin
if(rst=='b1) begin
rgb<= 'd0;
end
//注意198x198像素时,白框范围需要改变
else if (cnt_h>=144+x && cnt_h<=341+x && cnt_v>=35+y && cnt_v<=232+y) begin
rgb<=doutb;
end
else if (cnt_h>=144 && cnt_h<=783) begin
if (cnt_v>=35 && cnt_v<=194) begin
rgb<=RED;
end
else if (cnt_v>=195 && cnt_v<=354) begin
rgb<=GREEN;
end
else if (cnt_v>=355 && cnt_v<=514) begin
rgb<=BLUE;
end
end
else
rgb<='d0;
end
// addra 这里注意写ram的时钟为50mhz,读ram的时钟为25mhz(VGA的时钟)
always @(posedge sclk) begin
if(rst) begin
addra<= 'd0;
end
else if (pi_flag==1'b1 && addra==ADDR_MUX) begin
addra<='d0;
end
else if (pi_flag==1'b1) begin
addra<=addra+1'b1;
end
end
// addrb 注意ram读数据相对于读地址有一拍延迟,所以地址要早一拍给出
always @(posedge clk_25) begin
if(rst==1'b1) begin
addrb <= 'd0;
end
else if (cnt_h>=144+x-1 && cnt_h<=341+x-1 && cnt_v>=35+y && cnt_v<=232+y && addrb==ADDR_MUX) begin
addrb<='d0;
end
else if (cnt_h>=144+x-1 && cnt_h<=341+x-1 && cnt_v>=35+y && cnt_v<=232+y) begin
addrb<=addrb+1'b1;
end
end
asblk_mem_8x198x198 your_instance_name (
.clka(sclk), // input wire clka
.wea(pi_flag), // input wire [0 : 0] wea
.addra(addra), // input wire [15 : 0] addra
.dina(rgb_in), // input wire [7 : 0] dina
.clkb(clk_25), // input wire clkb
.addrb(addrb), // input wire [15 : 0] addrb
.doutb(doutb) // output wire [7 : 0] doutb
);
endmodule
6.uart_rx模块设计(直接用之前的设计 略)
7.顶层设计
module top_sobel(
input wire clk,//50mhz
input wire rst,
input wire rx,
output wire vsync,
output wire hsync,
output wire [7:0]rgb
);
wire clk_out25;
wire clk_out50;
wire rx_data;
wire pi_flag_rx_to_sobel;
wire pi_flag_sobel_to_vga;
wire [7:0] rgb_in;
clk_wiz_gen25 instance_name
(
// Clock out ports
.clk_out50(clk_out50), // output clk_out50
.clk_out25(clk_out25), // output clk_out25
// Clock in ports
.clk_in50(clk)); // input clk_in50
uart_rx inst_uart_rx (
.clk (clk_out50),
.rst (rst),
.rx (rx),
.po_data (rx_data),
.po_flag (pi_flag_rx_to_sobel)
);
sobel_ctrl inst_sobel_ctrl (
.clk (clk_out50),
.rst (rst),
.rx_data (rx_data),
.pi_flag (pi_flag_rx_to_sobel),
.rgb (rgb_in),
.po_flag (pi_flag_sobel_to_vga)
);
vga_shift inst_vga_shift (
.sclk (clk_out50),
.clk_25 (clk_out25),
.rst (rst),
.rgb_in (rgb_in),
.pi_flag (pi_flag_sobel_to_vga),
.hsync (hsync),
.vsync (vsync),
.rgb (rgb)
);
endmodule
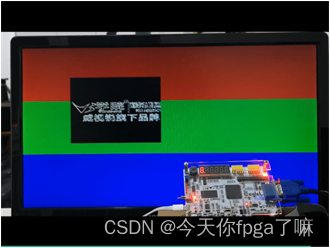
8.最终的显示效果:
上位机通过MATLAB处理,用友善助手下发原图像数据:

经过一系列图像处理后,最终在vga的显示效果:






![[JUCE]从一个有关右值引用的bug,探幽移动语义](https://img-blog.csdnimg.cn/direct/14da8e12c1ae42dabb5e31cae1f35c45.png)