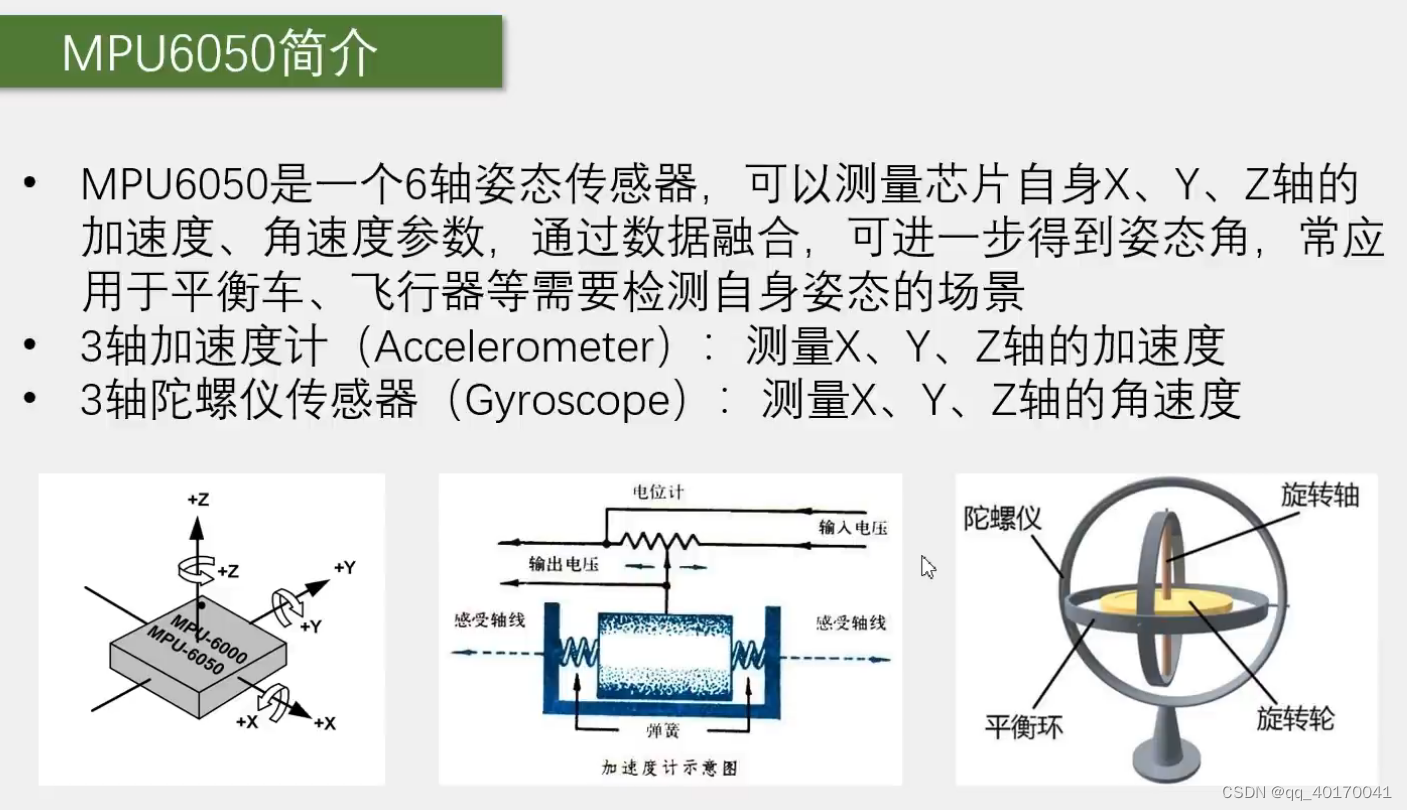
 10轴就是3轴加速度、3轴角速度、3轴磁场强度和1个气压强度
10轴就是3轴加速度、3轴角速度、3轴磁场强度和1个气压强度
任何一种传感器都不能获得精确且稳定的欧拉角,要想获得精确且稳定的欧拉角,就必须进行数据融合,把这几种传感器的数据结合起来,常见的数据融合算法,一般有互补滤波、卡尔曼滤波等
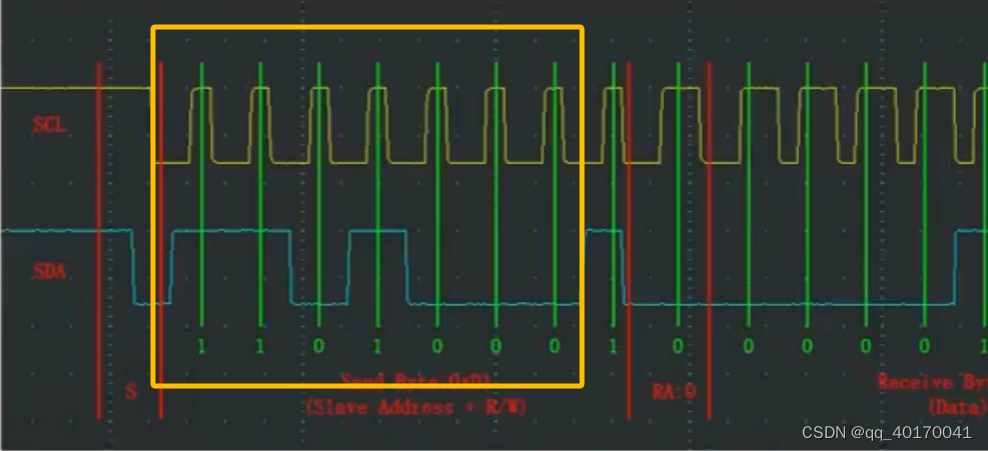
 I2C的地址为7位,假设这里将他的地址(110 1000)转换为16进制的0x68,一定不要忘记了在传输的时候要将0x68<<1,左移一位,从下图可以看到传输地址的时候会先发送7位从机地址,然后有一位是读写位,也就是实际的为1101 0001 (
I2C的地址为7位,假设这里将他的地址(110 1000)转换为16进制的0x68,一定不要忘记了在传输的时候要将0x68<<1,左移一位,从下图可以看到传输地址的时候会先发送7位从机地址,然后有一位是读写位,也就是实际的为1101 0001 ((0x68 << 1) | 1)
stm32单片机开发五、使用I2C连接MPU6050
news2026/2/13 18:21:29
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1644805.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

可编程 IP 新星 Story Protocol 何以引领链上文艺复兴浪潮?
当前,随着 Web3 行业发展进入全新阶段,与生成式人工智能(AIGC)技术融合正在创造潜力新星项目。也是目前的互联网生态下,任何普通民众都有权利创作高质量的音乐、艺术、散文和视频内容,带来了用户生成内容&a…

Verilog中求两个数的差值
根据输入信号a,b的大小关系,求解两个数的差值:输入信号a,b为8bit位宽的无符号数。如果a>b,则输出a-b,如果a≤b,则输出b-a。
接口信号图如下: 代码如下:
(CSDN代码块不支持Veril…

去斯洛文尼亚旅游最有趣的徒步路线推荐
春天当然要去徒步呀!斯洛文尼亚的徒步和登山小径纵横交错,遍布全国,尽管很多人首先想到的是高山地区连绵起伏的山峰,但实际上,在其他地区也有许多值得游览的徒步目的地。 这些低地地区的徒步路线将带你穿过如画的风…
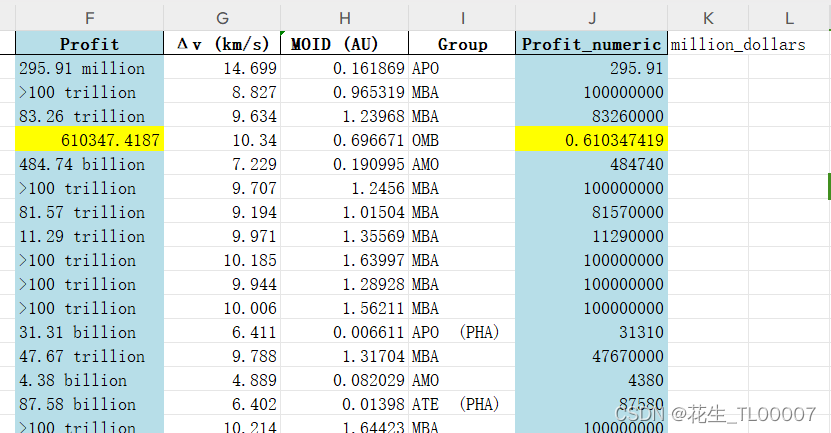
【小行星数据预处理py-】
#数据的导入
import pandas as pd
import numpy as np#导入EXCEL表格数据;na_values指定了将Excel文件中的空单元格转换为NaN
df_excelpd.read_excel(C:/Users/galax/Desktop/MBA小行星数据/4000.xls,na_values0)
#定义0为缺失值
see_datadf_excel
#统计每一列的缺失值个数
pri…
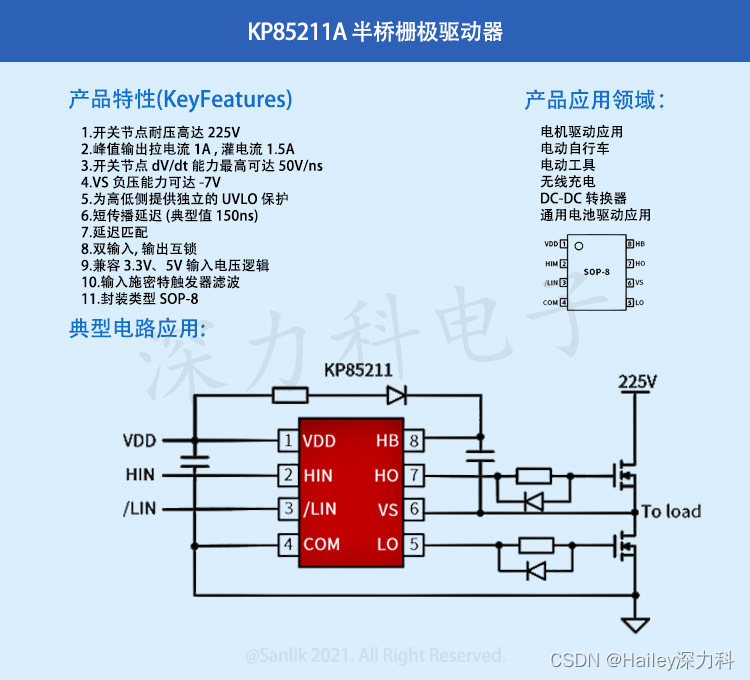
可代替IRS2003的半桥栅极驱动器KP85211A 225V耐压 1A/1.5A
KP85211A是一款 225V 耐压,具有 1A 拉电流和 1.5A 灌电流能力的半桥栅极驱动器,专用于驱动功率MOSFET或IGBT。采用高压器件工艺技术,具有良好的电流输出及出色的抗瞬态干扰能力。可保证开关节点 VS 瞬态 -7V 情况下系统正常工作。可支持开关节…

Leetcode—706. 设计哈希映射【简单】(constexpr)
2024每日刷题(127)
Leetcode—706. 设计哈希映射 数组实现代码
class MyHashMap {
public:MyHashMap() {memset(arr, -1, sizeof(arr));}void put(int key, int value) {arr[key] value;}int get(int key) {if(arr[key] -1) {return -1;} return arr…
基于openEuler22.03 LTS环境的docker容器基础
一、说明
本文配置环境为VMware虚拟机或华为云服务器(4核CPU,8 GB内存,40GB磁盘),OS为openEuler 22.03 LTS ,Linux服务器要求能联网。
二、安装docker
2.1 安装docker软件包
[rootnode01 ~]# dnf -y in…
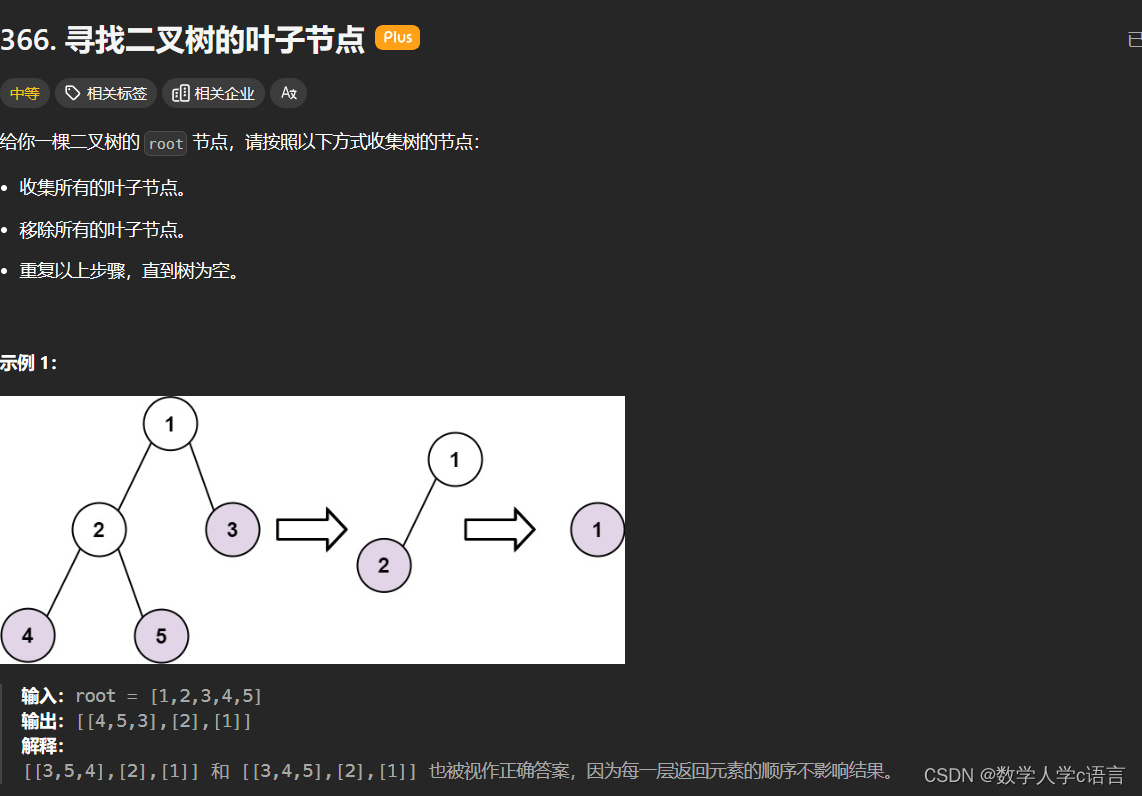
leetcode尊享面试——二叉树(python)
250.统计同值子树 使用dfs深度搜索,同值子树,要满足三个条件:
对于当前节点node,他的左子树血脉纯净(为同值子树),右子树血脉纯净(为同值子树),node的值等于…
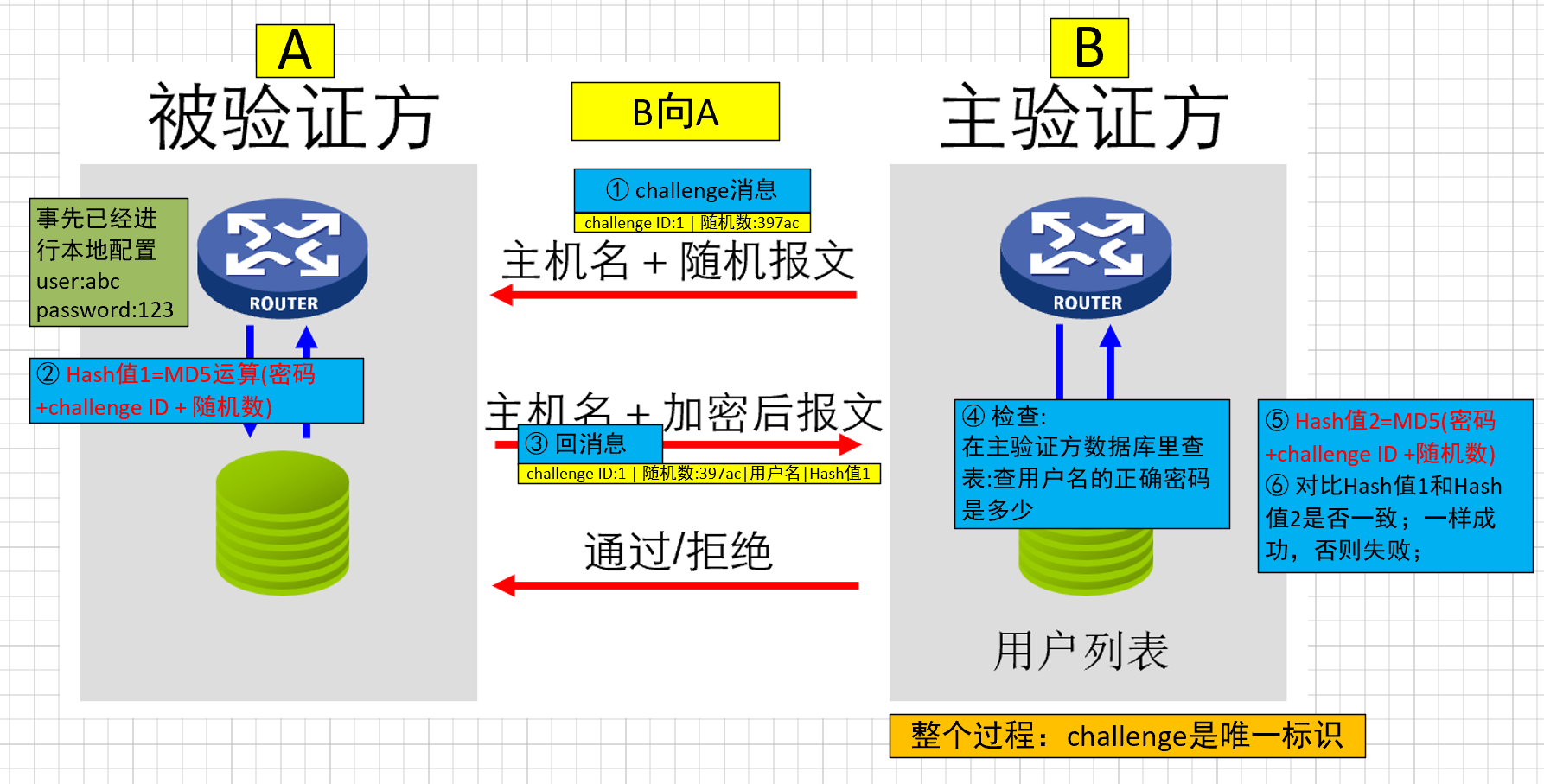
第27章-配置PPP
1. 概述
2. 工作机制
3. 验证
4. PPP-MP 1. 概述 1.1 背景引入 以太网使用双绞线,广域网使用光纤; ① 定义:PPP协议即点到点协议; ② 应用场景:在串行线路上运行;主要是广域网 ③ 特点: 支持…
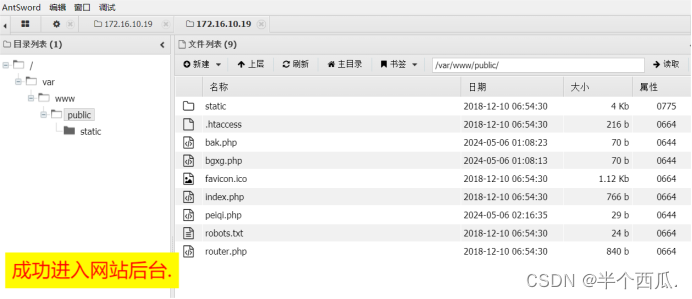
PHP 框架安全:ThinkPHP 序列 漏洞测试.
什么是 ThinkPHP 框架.
ThinkPHP 是一个流行的国内 PHP 框架,它提供了一套完整的安全措施来帮助开发者构建安全可靠的 web 应用程序。ThinkPHP 本身不断更新和改进,以应对新的安全威胁和漏洞。 ThinkPHP 框架的安全特性:
(1) 输入过滤和验证…

既能自动仿写公众号爆文,还能批量帮你上架闲鱼商品,打造自己的数字员工,简直yyds
「想象一下,如果有一个机器人在你的计算机上24小时不间断地工作,会不会做梦都笑着」
一、RPA机器人是什么?
RPA——机器人流程自动化,它可以帮助人们完成重复性的、繁琐的工作,比如数据输入、网页爬取、自动化流程等…
![[JUCE]从一个有关右值引用的bug,探幽移动语义](https://img-blog.csdnimg.cn/direct/14da8e12c1ae42dabb5e31cae1f35c45.png)
[JUCE]从一个有关右值引用的bug,探幽移动语义
一、问题
当我尝试在\JUCE\extras\WindowsDLL\Builds\VisualStudio2022目录下编译JUCE库的时候,提示报错如下: 报错提示如下: 这里涉及到两个问题
一、这个std::move是干嘛用的
二、为什么这里会报错?
另外,我在实…
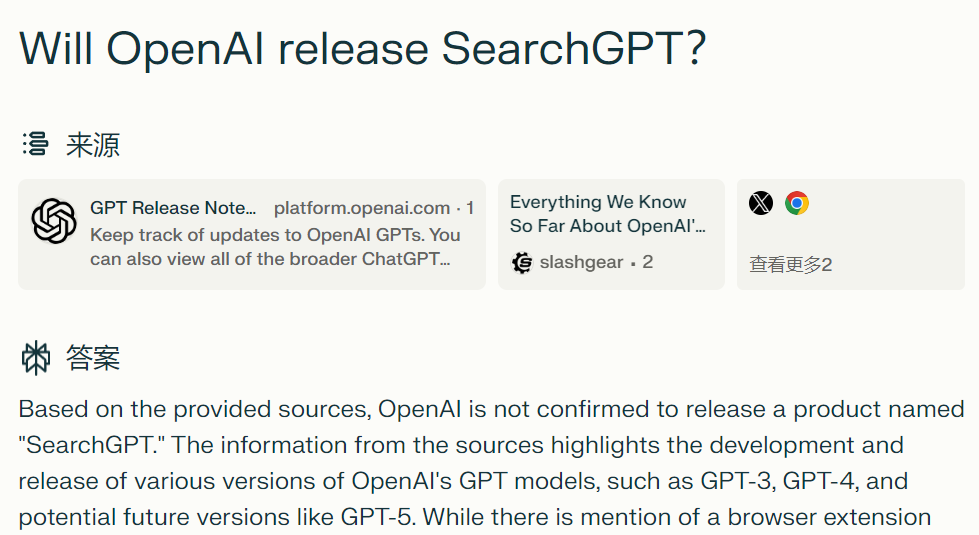
OpenAI 也要做搜索?传 SearchGPT 将迎击谷歌核心业务!OpenAI 与金融时报新协议已定,将进行链接和引用
OpenAI也要杀入AI搜索领域分一杯羹?非常可能!毕竟连SearchGPT的入口已经准备好了! 图片
X平台上网友甚至还发现了SearchGPT的medo视频! OpenAI凭借自身的技术积累,如果真的进入搜索应用业务,必然…

震撼来袭!AI创新燃爆2024中关村论坛,唯迈医疗破解心脑血管“命门”危机
4月29日,备受瞩目的2024中关村论坛圆满闭幕。国内领先的介入诊疗全流程解决方案企业——唯迈医疗,携新一代Taikon太空 DSA和介入手术机器人惊艳亮相,以AI赋能介入诊疗,为心脑血管疾病治疗带来了革命性的突破,引发党央媒…

最新优质电商API接口,附带教程【多语言环境高并发】
给大家更新一波24年一月份的新接口吧。 01 接口信息 线路推荐: 多仓:
1.春盈:
https://wds.ecsxs.com/230989.json 2.无意:
http://www.wya6.cn/tv/yc.json 3.主流电商平台API数据采集 单仓: 1.饭太硬:
http:/…
阿里实习生:面试阿里其实并没有那么难。
愉快的五一假期已经结束了, 又要投入到学习和工作当中了。
今天分享一位同学在阿里的Go后端实习面经详解, 希望对你有帮助。 Go里有哪些数据结构是并发安全的?
并发安全就是程序在并发的情况下执行的结果都是正确的;
Go中数据类型分为两大类ÿ…

Altman确认:神秘Chatbot非GPT-4.5,OpenAI搜索引擎即将上线
🚀 Altman确认:神秘Chatbot非GPT-4.5,OpenAI搜索引擎即将上线
摘要:近日,Sam Altman在哈佛大学的演讲中确认,引发广泛猜测的gpt2-chatbot并非OpenAI即将发布的下一代模型GPT-4.5。与此同时,关于…

llama3 史上最强开源大模型,赶超GTP-4,逼宫OpenAI
2024年4月18日,Meta公司推出了开源大语言模型Llama系列的最新产品—Llama 3,包含了80亿参数的Llama 3 8B和700亿参数的Llama 3 70B两个版本。Meta称其为“迄今为止最强的开源大模型”。
怪兽级性能
LLaMA3 提供了不同参数规模的版本,以适应…
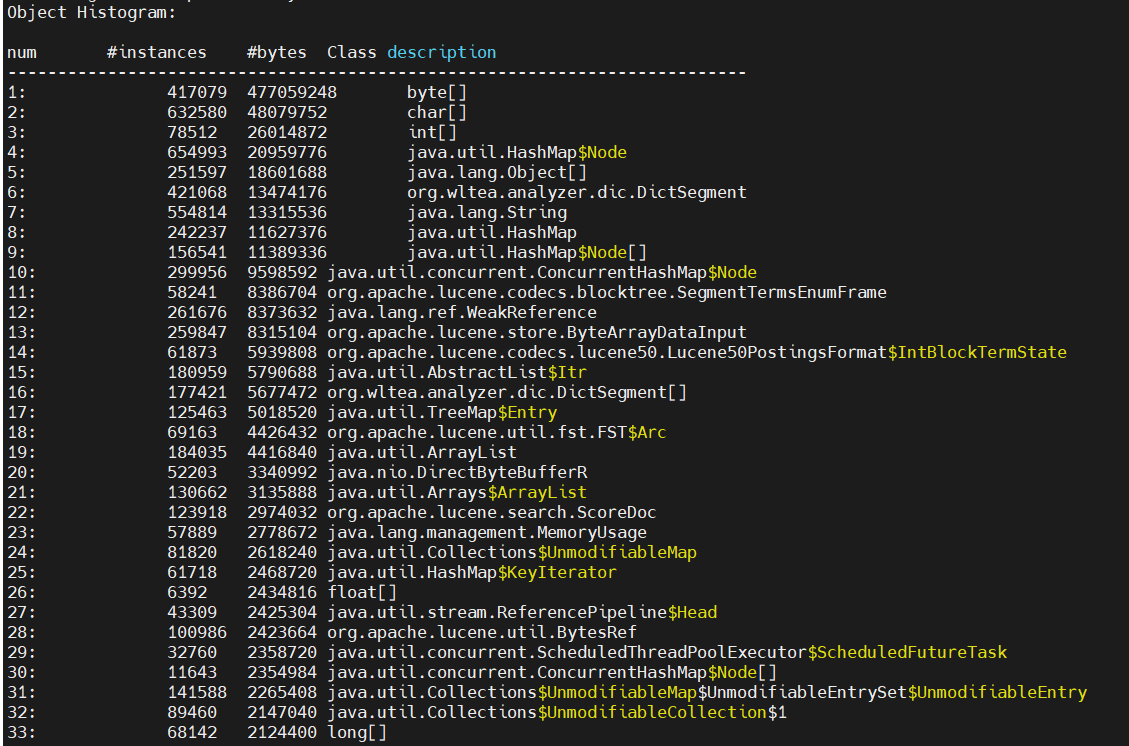
性能问题分析排查思路之机器(4)
前言
本文是性能问题分析排查思路的展开内容之一,主要分为日志1期,机器4期、环境2期共7篇系列文章,本期是第四篇,讲机器(硬件)的内存方面的分析排查方法与最佳实践。
在性能问题分析排查系列的位置如下图…
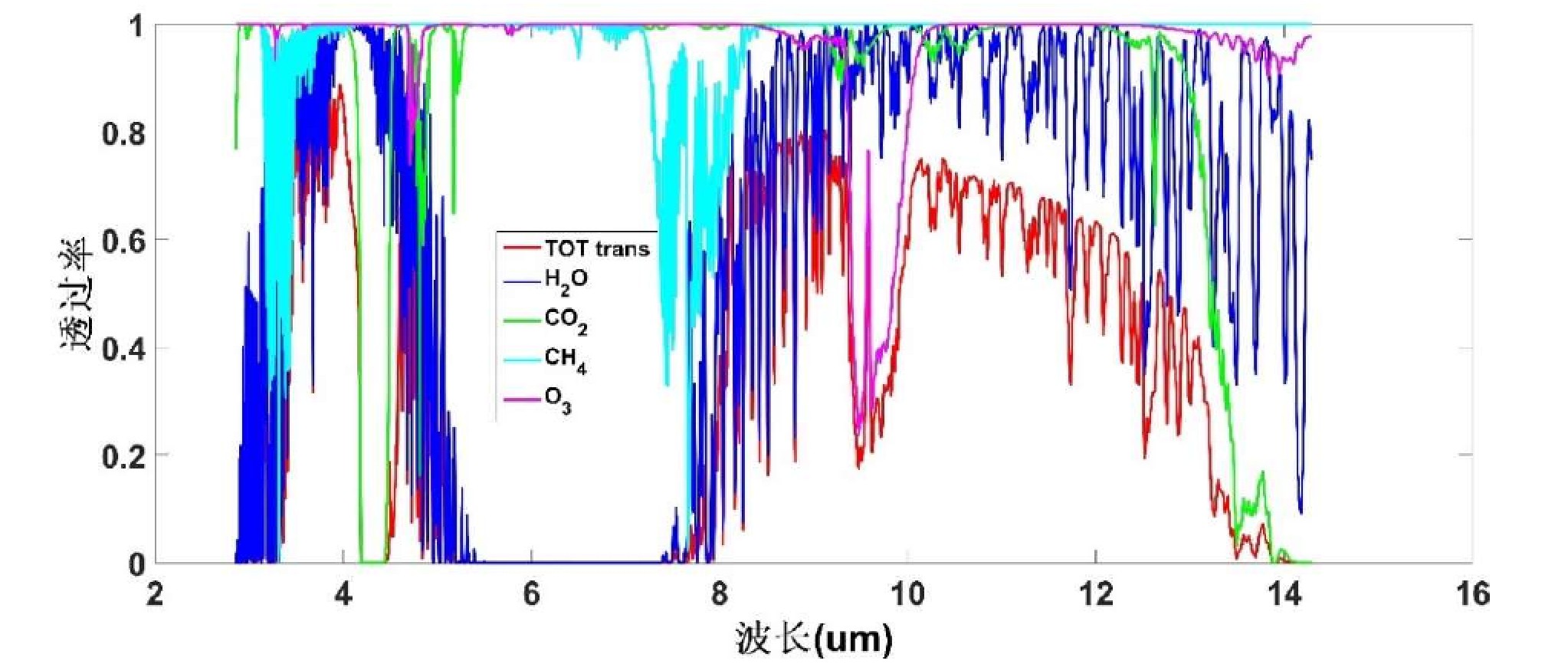
辐射传输基础理论详解与LST反演方法
地表温度LST(Land Surface Temperature)是区域和全球尺度上陆地表层系统过程的关键参数,它综合了地表与大气的相互作用以及大气和陆地之间能量交换的结果。地表温度作为众多基础学科和应用领域的一个关键参数,能 够提供地表能量平衡状态的时空变化信息&a…