本篇介绍无约束优化的问题,通过四种算法来进行求解的过程和思路,也是最优化方法中的最重要的一类问题。
无约束优化问题主要是通过迭代搜索算法来切结,比线性规划的计算量都小一点。
目录
- 无约束优化问题
- 最优性条件
- 最速下降法
- 牛顿法
- 共轭梯度法
- 拟牛顿法
无约束优化问题
最优性条件
首先是无约束优化问题的最优性条件,是必要条件,得是局部极小才有梯度=0和hesse阵半正定。

其次是充分条件:

无约束凸规划则可以直接有以下充要条件:

之前的学习中我们知道了线搜索迭代算法,这里把它用来计算最优值,一般思路如下:


接下来我们学习四种迭代算法的基本思路和性质:
最速下降法
最速下降法,这是因为负梯度方向是下降的最快的,顾名。

最速下降法具有全局收敛性。然后用精确一维线搜索时的步长为:

这里要求了二次正定函数。步长信息就是已知的。
牛顿法
然后是牛顿法,经典牛顿法步长为1:

注意,经典牛顿法不一定是下降方向,
所以计算hesse阵很重要。

经典牛顿法一般都不会让你一直求,这里注意一下,这里需要注意什么是二次终止性:


收敛上看,它是局部二阶收敛的:

由于经典牛顿法比较特殊,所以还是需要引入带线搜索的牛顿法,其中用精确一维线搜索时是阻尼牛顿法:

带线搜索的牛顿法具有全局收敛性和局部二阶收敛速度。
共轭梯度法
共轭有以下特征:


以下关于极小值的两个定理:


对于标准的二次函数使用共轭方向法就为:

这里面方向和步长就不一样了,方向是共轭方向,步长还是精确一维线搜索得到的步长。


拟牛顿法
拟牛顿法和牛顿法比较类似,不同的是用的是hesse阵是用H函数估计出来的:

也就是说他的迭代方向H(k)不再是hesse的逆矩阵,而是-H(K)g_k。

所以算法稍微复杂一点:

加入了一步计算H的,其余的相差不大。
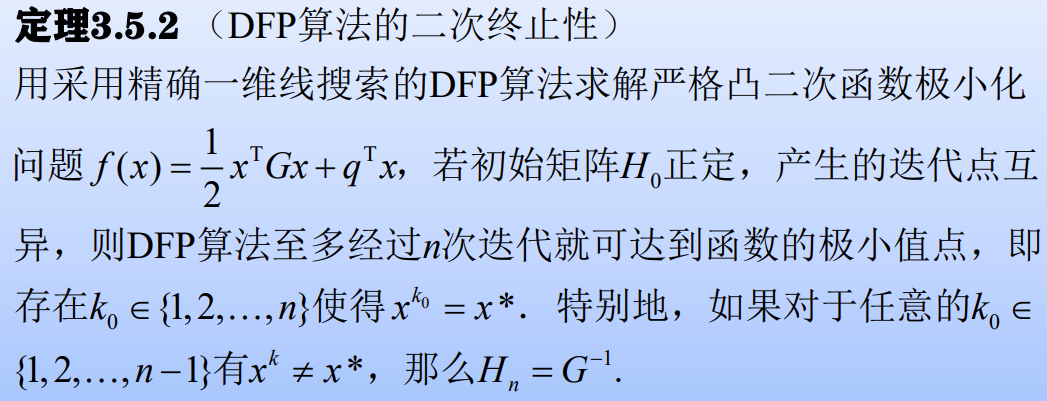
理论性质方面,DFP算法的性质有:
首先是满足拟牛顿方程(H_k+1的表达式),同时产生的搜索方向是共轭方向。
然后也有二次终止性:
到此为止就介绍完了所有的无约束优化问题的内容。