1、内容简介
略
635-可以交流、咨询、答疑
2、内容说明
随着人类文明的发展,传感器技术、计算机应用技术、机械学、微电子技术、通讯技术以及人工智能技术也得到了飞速的发展。进入21世纪后,在机器人学和机器人技术领域,自平衡小车已成为其中的重要分支。由于其固有的不稳定动力学特性,引发了人们极大的研究兴趣,各种先进的自平衡小车相继诞生。由于其高速灵活在平坦的环境中独特的优越性,获得了广泛的应用。自平衡小车具有良好的自动导引功能,因此在现代物流传送过程中也扮演着重要的角色。随着研究的不断深入,应用领域更加广泛,他们经常需要在路面狭窄崎岖、凹凸不平、恶劣环境下执行高难度工作。因此这是一个值得研究的课题。
双轮自平衡小车最显著的特点是系统多变量、强耦合、非线性和自然不稳定。除此之外还有良好的自平衡能力和机动性能,可以完成自由平衡、定点平衡、自旋、环绕巡航等多种基本的运动模式,鲁棒性好,能应对外部较大的冲击扰动和阶跃扰动,能适应较复杂的外部环境,在崎岖路面上前进,跨越障碍,上下坡道的坡度能达到25°,具有人工“感觉-运动系统”,具有Skinner的操作条件反射理论的操作学习机制,能像人和动物一样,自主地学习运动平衡控制技能。具体优点如下:
结构轻巧、运动灵活敏捷、占地面积小,可以在许多特殊的环境(如空间狭窄的搜救地或拥挤的办公环境)中应用,也可作为交通、运载工具和运动器械等。
操作简单方便,适合大众使用,有一定的经济价值。
驱动功率小,电池能长时间供电,为环保型车提供了新的思路。
可原地转弯,移动方向可以任意改变,操作灵活,弥补了传统多轮布局的特点。
基于这些特点,双轮自平衡小车可以有效地解决如今拥堵的交通问题,从
成为一种新型的代步工具。
PID线性控制器至今仍在控制系统的应用中占据着统治地位,这是因为PID控制器结构简单、使用方便、控制对象面广,其理论上有成熟的稳定性设计和参数整定方法,在工程应用中积累了丰富的实践经验,然而PID控制器的线性特性只在工作点附近具有良好的线性控制,偏离工作点较远时,由于控制对象的非线性,难以保持系统的动态品质。模糊控制的特点是在偏离工作点较远的区域可明显改善控制的动态性能,并且对控制对象特性的变化比PID控制具有更强的鲁棒性。由于模糊控制器本质上属于非线性控制方法,缺乏通用的系统化设计方法,控制器的稳定性难以保证,控制精度不够高,并且在工作点附近容易产生极限震荡。而模糊PID控制结合以上两种控制方法的优点,可以在很大程度上缩短调节时间,克服扰动,改善控制效果。
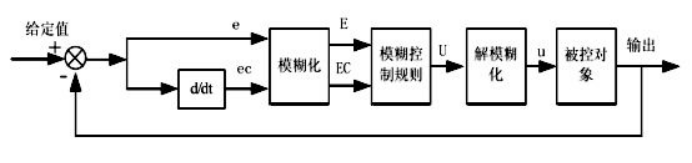
3.3.2 模糊控制器结构选择
自平衡小车的系统输入有两个变量,即误差E计误差变化率EC,因此本文的模糊控制器选为二维模糊控制器,结构图如下所示:
3、仿真分析
略
4、参考论文
略
![[Android Studio] 如何查看Android Studio的版本信息](https://img-blog.csdnimg.cn/24b696d76d374a9992017e1625389592.gif)