一、过调制
电机控制中的过调制(Overmodulation)是指在实施脉宽调制(PWM)过程中,使调制指数(调制深度)超过常规线性调制区的极限,进入非线性调制区域。这一策略通常应用于诸如空间矢量脉宽调制(Space Vector Pulse Width Modulation, SVPWM)等调制技术中,以进一步提升电机驱动系统的性能。以下是对电机控制中过调制现象及其作用的详细说明:
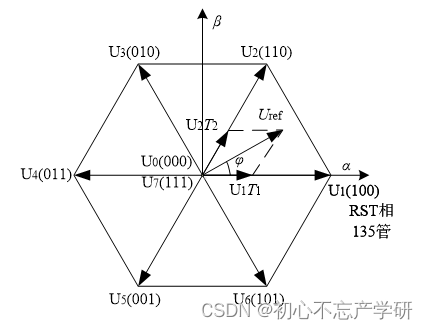
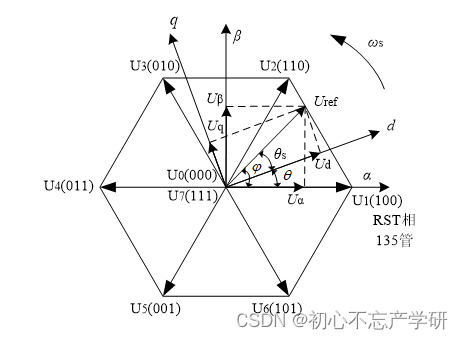
三相两电平逆变器的电压矢量图
过调制现象
在常规的线性调制状态下,脉宽调制信号的波形保持与正弦波类似的形状,各相电压的幅值和相位与给定的参考电压成比例。当调制指数增大至100%时,各相电压波形接近理想的正弦波,此时调制深度达到最大,电机的输出电压与电流接近理论最大值。
然而,当调制指数超过100%进入过调制区域时,会发生以下现象:
-
非线性电压波形:各相电压波形开始显著偏离正弦波形,出现更多的阶梯状边缘和更宽的脉冲宽度,甚至在极端情况下逼近方波。
-
电压利用率提升:虽然波形非线性增加,但电机仍然能获得高于线性调制区的平均电压,这意味着对于给定的直流母线电压,电机可以承受更高的瞬时电压,从而提升电机的瞬时过载能力。
-
电流谐波增加:过调制导致的非线性电压波形将引入更多的电流谐波,可能对电机绝缘、轴承、电磁噪声以及与电机相连的电力电子设备的性能产生影响。
过调制的作用与应用
尽管过调制带来了非线性电压波形和电流谐波的增加,但它在特定应用场合下具有显著的优势,主要包括:
-
增强瞬态响应:通过提供更高的瞬时电压,过调制有助于电机在启动、加速或负载突变时更快地建立磁场,从而缩短启动时间,提高动态响应速度。
-
弱磁控制:在需要扩大电机速度范围的弱磁运行状态下,过调制可以提供额外的电压裕度,使电机能够在不降低气隙磁通的前提下实现更高的转速。
-
提高效率:在某些工况下,过调制能提高电机的平均工作效率,尤其是在负载轻或需要快速响应的场合,通过充分利用直流母线电压,可以在不增加硬件成本的情况下提升系统整体能效。
-
简化系统设计:在需要高电压等级但又希望使用较低电压等级的元器件时,过调制可以作为一种软件解决方案,避免硬件升级的成本和复杂性。
过调制控制策略
实现过调制通常需要特殊的控制算法,包括:
-
SVPWM过调制算法:针对SVPWM技术,通过计算并生成过调制区的开关状态序列,确保在非线性调制状态下仍能保持电压矢量的有效合成,同时尽可能减少电流谐波。
-
动态调整调制指数:根据电机运行状态和负载需求,实时调整调制指数,确保在需要时进入过调制区,而在不需要时返回线性调制区,以兼顾效率、性能和电磁兼容性。(可计算或查表)
-
谐波抑制技术:结合滤波器设计或采用先进的电流控制策略(如预测电流控制、重复控制等),有效抑制过调制引起的电流谐波,保持电机和系统的良好运行品质。
电机控制中的过调制是一种通过超越常规线性调制范围,利用非线性PWM波形来提升电机瞬态性能、扩大运行范围和提高效率的技术。虽然它会导致电流谐波增加,但通过合理的控制策略和硬件设计,可以有效平衡这些不利影响,使之成为现代电机驱动系统中的一种有效工具。在实际应用中,过调制技术需根据具体的电机类型、负载特性以及系统性能要求进行精细调整和优化。
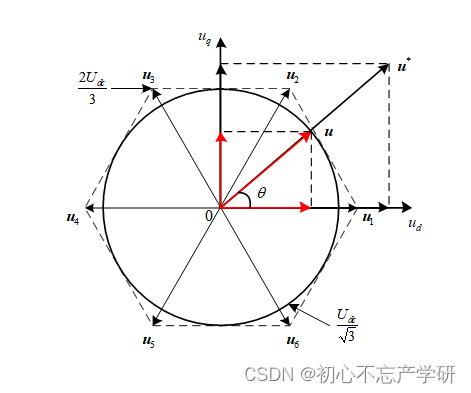
参考电压矢量幅值Uref在线性调制区内
过调制区域:参考电压矢量幅值Uref在六边形边界
过调制区域为阴影面积标注的区域,是逆变器实际可输出的电压矢量区域
严格意义上的方波模式通常指的是没有进行任何PWM调制,即功率器件全开(导通)或全关(关断)。这种模式在现代牵引逆变器中也有采用,需要注意得是,它会导致严重的电流谐波、电机振动、发热等问题,系统层面需要兼顾轨道交通系统对效率、舒适性和可靠性的高要求。过调制虽会使波形趋近方波,但仍然是有规律的PWM调制,并非纯粹的方波模式。
二、问题概述
过调制算法在电机控制中用于实现非线性PWM调制,以提供高于常规线性调制区的瞬时电压,提升电机的瞬态响应和效率。尽管过调制带来了诸多优势,但其设计和实施也面临一些难点。以下是过调制算法的主要难点及相应的解决方法:
难点一:非线性电压波形控制
**问题描述**:过调制状态下,逆变器输出的电压波形显著偏离正弦波,呈现出更为复杂的非线性形态,这可能导致电机电流谐波增加、电机损耗增加、电磁兼容性恶化以及电机振动和噪声加剧。
**解决方法**:
1. **优化PWM策略**:采用空间矢量脉宽调制(SVPWM)或优化的三角载波过调制算法,通过精确计算和调整开关状态,尽量使合成的电压矢量接近理想正弦波,减少谐波含量。(比如查表)
2. **谐波抑制技术**:在控制算法中引入谐波检测与补偿模块,通过实时监测和抵消电流中的特定谐波分量,减轻其对电机和系统的负面影响。
3. **滤波器设计**:成本较高,在逆变器输出端配置适当的LC滤波器,针对性地滤除特定次谐波,改善电流波形。
难点二:精确电流控制
**问题描述**:随着调制指数超过100%,电流控制的难度增大,因为非线性电压波形使得传统的线性电流控制器不再适用,而且电机参数的非线性变化和电流传感器的非理想特性可能加剧控制难度。
**解决方法**:
1. **非线性电流控制器**:采用自适应、滑模控制、神经网络控制等非线性控制策略,以适应过调制状态下电流的变化特性。
2. **模型预测控制(MPC)**:通过预测未来的电流状态,提前规划逆变器开关状态,以达到精确的电流跟踪和控制。
3. **改进电流传感器**:使用高精度、高速响应的电流传感器,并进行适当的信号调理,以准确捕捉非线性电流信号。
难点三:功率器件应力管理
**问题描述**:过调制可能导致功率器件承受更高的电压尖峰和电流峰值,增加器件的开关损耗和热应力,可能缩短其使用寿命。
**解决方法**:
1. **软开关技术**:采用软开关技术(如ZVS、ZCS)或门极驱动优化技术,减少开关损耗,降低器件应力。
2. **过电压保护**:设置适当的箝位电路或采用智能栅极驱动器,防止电压尖峰对器件造成损害。
3. **热管理**:加强逆变器的散热设计,确保功率器件工作在安全温度范围内,必要时采用主动冷却系统。
难点四:系统稳定性与鲁棒性
**问题描述**:过调制状态下,系统动态特性发生变化,容易受到参数变化、扰动和不确定性的影响,可能导致系统稳定性下降。
**解决方法**:
1. **增益调度与自适应控制**:根据调制指数的变化动态调整控制器增益,或采用自适应控制策略,确保在不同过调制程度下系统的稳定性和性能。
2. **状态观测器**:利用状态观测器估计相关状态变量,增强对系统动态特性的感知和控制能力。
3. **鲁棒控制技术**:采用H∞控制、滑模控制、自抗扰控制(ADRC)等鲁棒控制策略,增强系统对不确定性和外部扰动的抵抗能力。
难点五:实时性要求
**问题描述**:过调制算法通常涉及复杂的计算和实时决策,对控制系统的计算能力和响应速度提出较高要求。
**解决方法**:
1. **高效算法**:采用快速计算方法(如查表法、快速傅里叶变换等)和优化的控制结构(如前馈控制、解耦控制等),减少计算复杂度。
2. **高性能处理器**:选用具有足够计算能力的微处理器或数字信号处理器(DSP),确保算法能够实时执行。
3. **代码优化**:对控制程序进行优化编译和指令级优化,提高执行效率。
综上所述,过调制算法的难点主要集中在非线性电压波形控制、精确电流控制、功率器件应力管理、系统稳定性与鲁棒性以及实时性要求等方面。解决这些问题需要综合运用先进的控制理论、优化的PWM策略、高效的硬件设计以及有针对性的软件优化,确保在实现过调制带来的性能提升的同时,维持系统的稳定、可靠和高效运行。
三、过调制区域
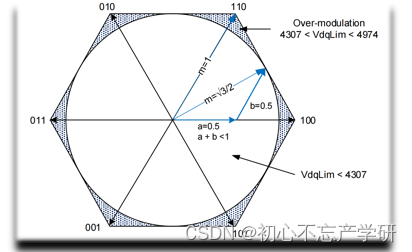
(1)过调制1区和2区的划分方法很多,比如以电压矢量六边形的外接圆进行划分,外接圆与内接圆之间为1区,外接圆之外为2区,或者以电压矢量角度和幅值进行区域的划分。
(2)但是对于逆变器发波来说只能最多将发波电压矢量限制在电压矢量六边形上。
(3)从线性区域即内接圆,从内接圆到外接圆,从外接圆到方波模式,三者之间涉及电压矢量的缩放和拉伸,且过渡过程涉及的解析算法(三角函数计算)和数值算法(如标定查表)也较多。
相关具体内容待之后详细解析......
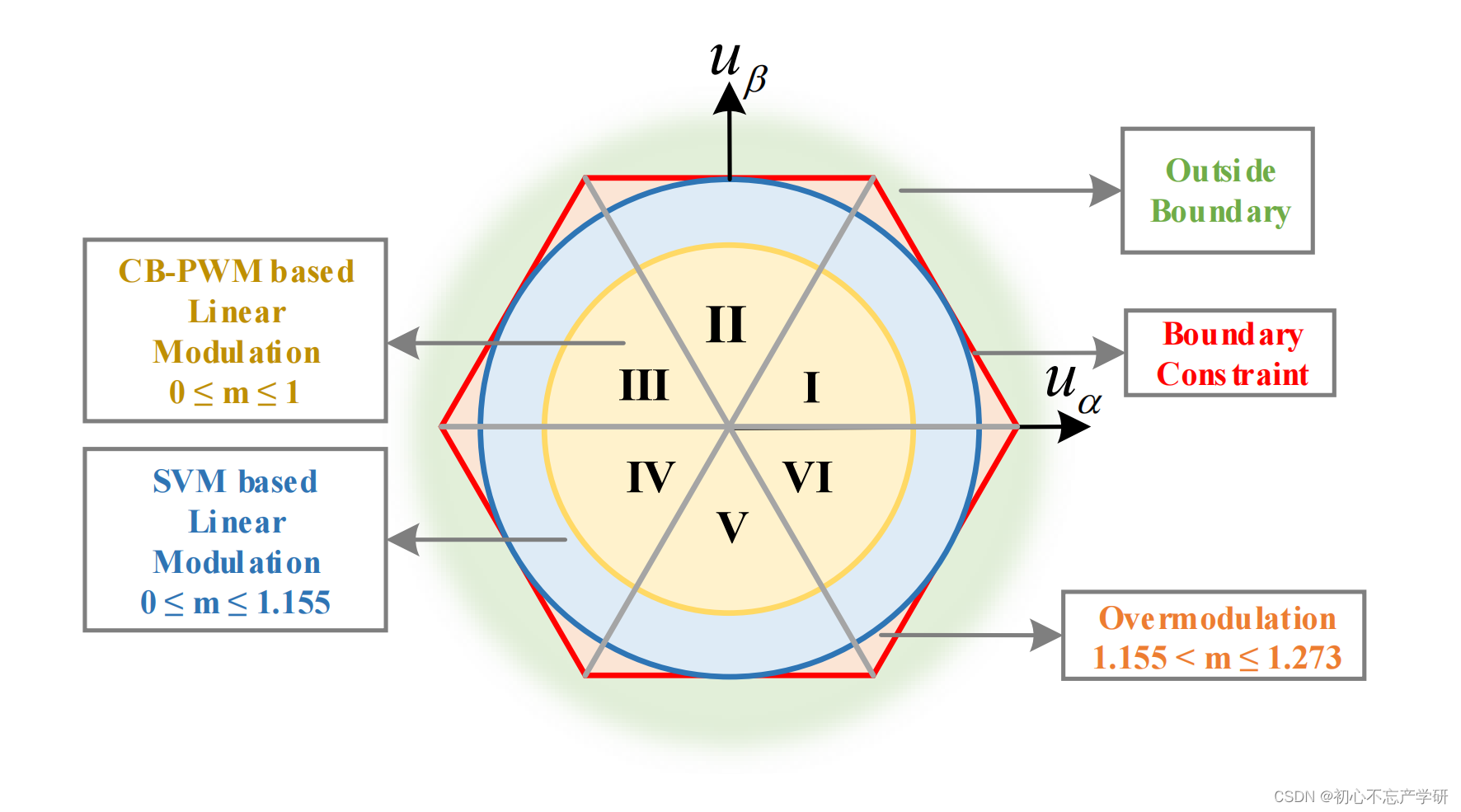
采用傅里叶展开后 基频幅值 就是图中的数值,
比如SVM为叠加三次谐波的基频幅值为 2 / 根号3 约等于 1.155,
方波的基频幅值为 4 / pi 约等于1.273,发波电压矢量被限制在电压矢量六边形上
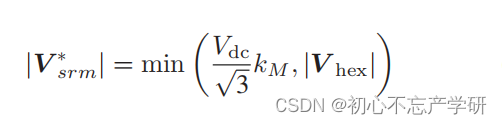
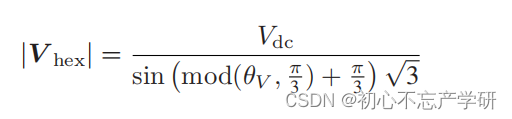
过调制电压矢量幅值其较为简单的表达式如下图所示:可取 kM = 1,后续弱磁控制中也会涉及