1思路
1打开时钟
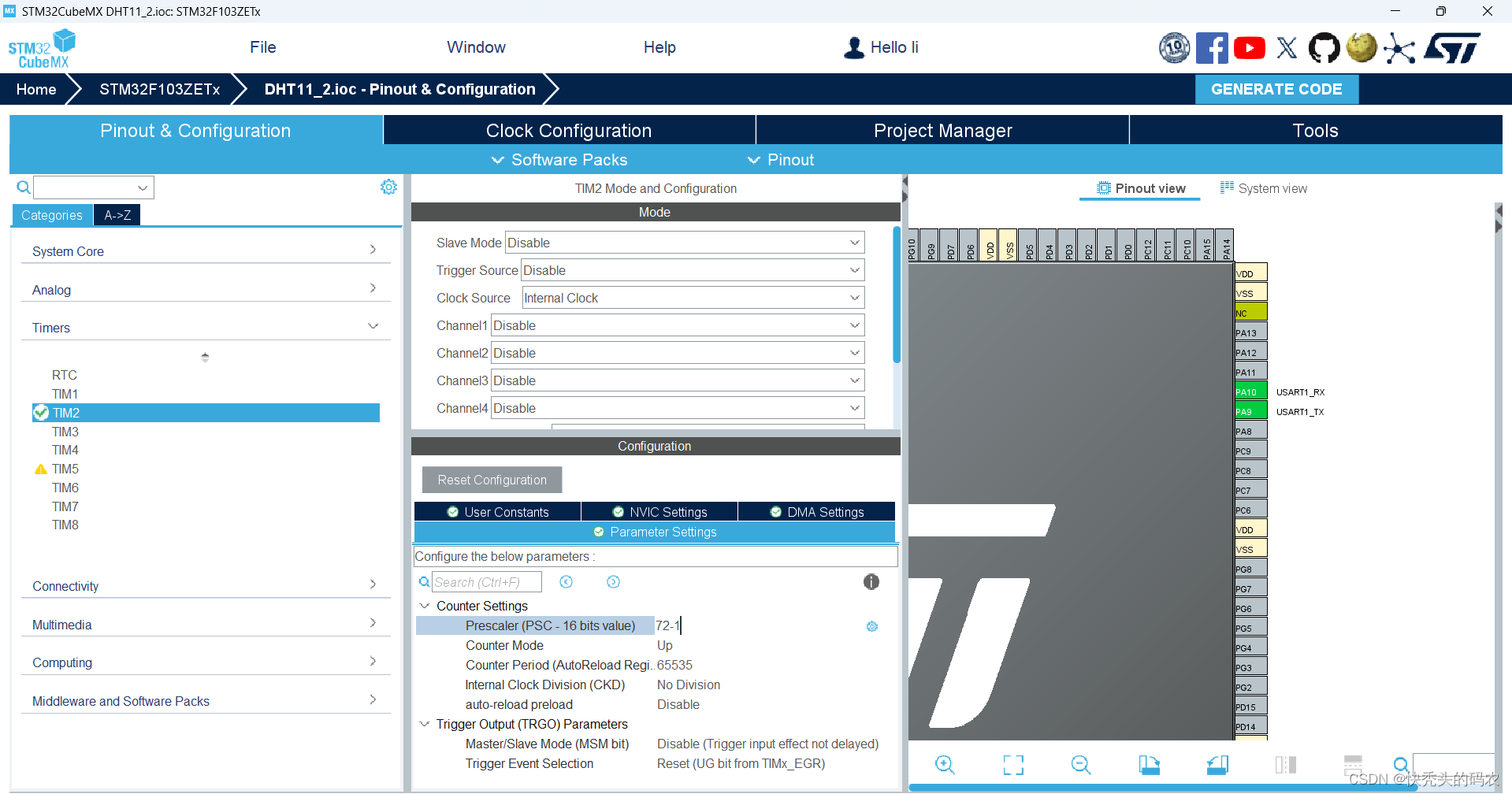
1.1使用定时器实现us级的计时
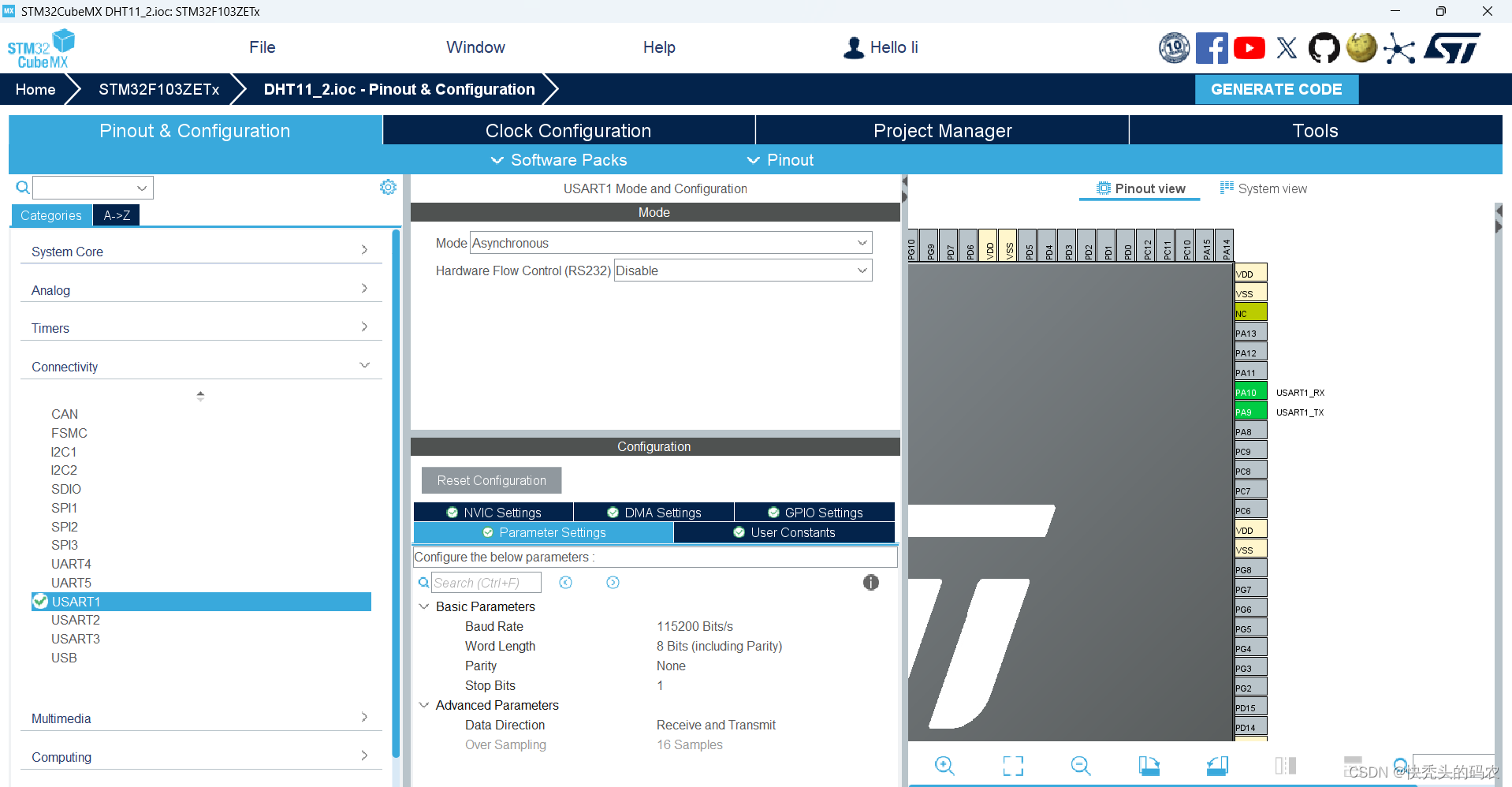
1.2在打开串口
1,3在DHT11驱动中修改引脚
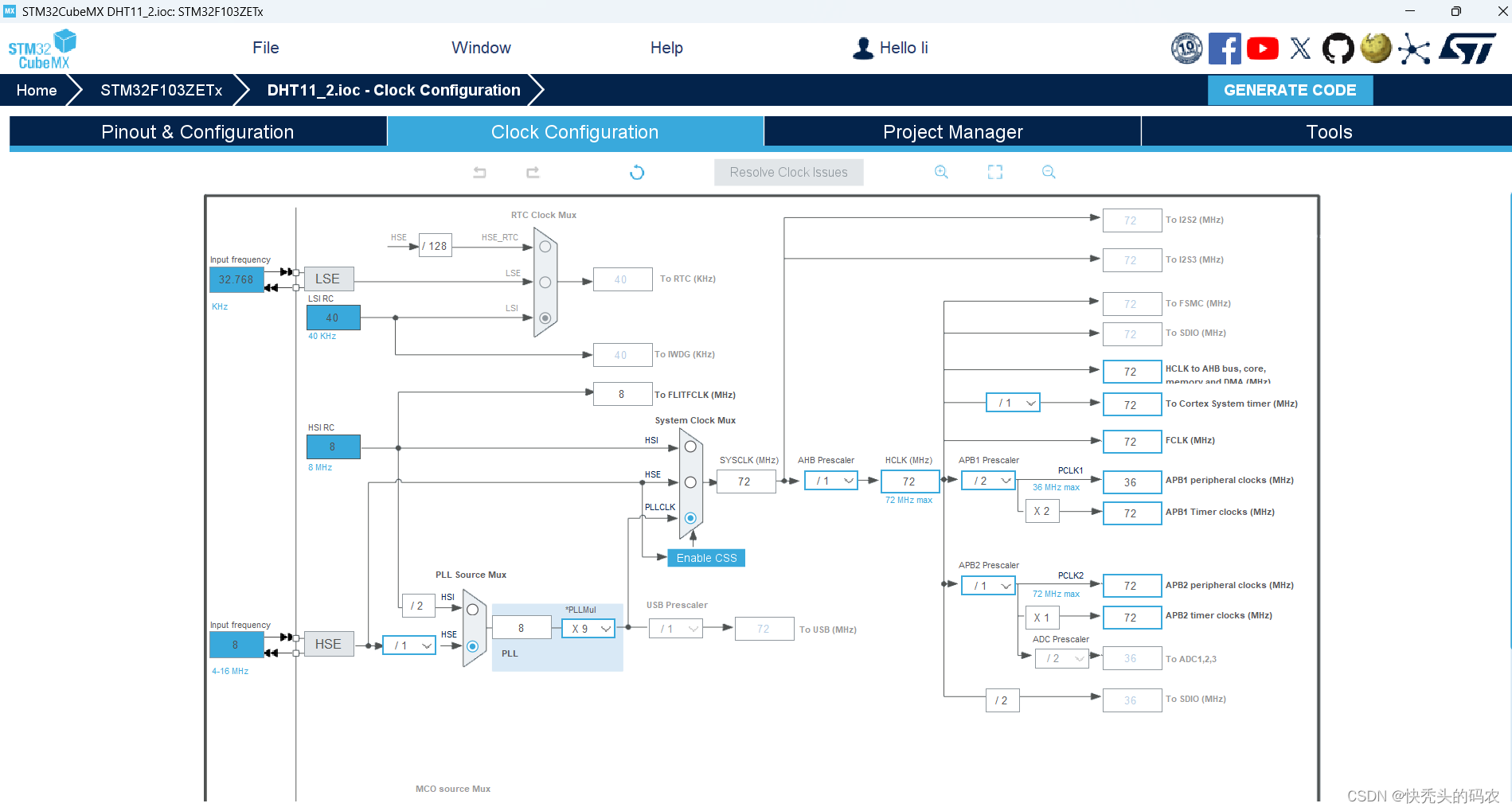
stm32cudeMX 配置
1打开时钟
2打开串口
3打开tim1(定时器)
4生成代码
代码设置
1导入DHT11库(tim.h是定时器的文件系统自动生成的)
DHT11.c
#include "dht11.h"
#include "tim.h"
void DHT11_IO_IN(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.Pin = GPIO_PIN_1;
GPIO_InitStructure.Mode = GPIO_MODE_INPUT;
HAL_GPIO_Init(GPIOA,&GPIO_InitStructure);
}
void DHT11_IO_OUT(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.Pin = GPIO_PIN_1;
GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA,&GPIO_InitStructure);
}
//复位DHT11
void DHT11_Rst(void)
{
DHT11_IO_OUT(); //设置为输出
DHT11_DQ_OUT_LOW; //拉低DQ
HAL_Delay(20); //拉低至少18ms
DHT11_DQ_OUT_HIGH; //DQ=1
delay_us(30); //主机拉高20~40us
}
//等待DHT11的回应
//返回1:未检测到DHT11的存在
//返回0:存在
uint8_t DHT11_Check(void)
{
uint8_t retry=0;
DHT11_IO_IN(); //设置为输出
while (DHT11_DQ_IN&&retry<100)//DHT11会拉低40~80us
{
retry++;
delay_us(1);
};
if(retry>=100)return 1;
else retry=0;
while (!DHT11_DQ_IN&&retry<100)//DHT11拉低后会再次拉高40~80us
{
retry++;
delay_us(1);
};
if(retry>=100)return 1;
return 0;
}
//从DHT11读取一个位
//返回值:1/0
uint8_t DHT11_Read_Bit(void)
{
uint8_t retry=0;
while(DHT11_DQ_IN&&retry<100)//等待变为低电平
{
retry++;
delay_us(1);
}
retry=0;
while(!DHT11_DQ_IN&&retry<100)//等待变高电平
{
retry++;
delay_us(1);
}
delay_us(40);//等待40us
if(DHT11_DQ_IN)return 1;
else return 0;
}
//从DHT11读取一个字节
//返回值:读到的数据
uint8_t DHT11_Read_Byte(void)
{
uint8_t i,dat;
dat=0;
for (i=0;i<8;i++)
{
dat<<=1;
dat|=DHT11_Read_Bit();
}
return dat;
}
//从DHT11读取一次数据
//temp:温度值(范围:0~50°)
//humi:湿度值(范围:20%~90%)
//返回值:0,正常;1,读取失败
uint8_t DHT11_Read_Data(uint16_t *temp,uint16_t *humi)
{
uint8_t buf[5];
uint8_t i;
DHT11_Rst();
if(DHT11_Check()==0)
{
for(i=0;i<5;i++)//读取40位数据
{
buf[i]=DHT11_Read_Byte();
}
if((buf[0]+buf[1]+buf[2]+buf[3])==buf[4])
{
*humi=(buf[0]<<8) + buf[1];
*temp=(buf[2]<<8) + buf[3];
}
}else return 1;
return 0;
}
//初始化DHT11的IO口 DQ 同时检测DHT11的存在
//返回1:不存在
//返回0:存在
uint8_t DHT11_Init(void)
{
DHT11_Rst();
return DHT11_Check();
}
DHT11.h
#ifndef __DHT11_H__
#define __DHT11_H__
#include "main.h"
#define DHT11_DQ_OUT_HIGH HAL_GPIO_WritePin(GPIOA,GPIO_PIN_1,GPIO_PIN_SET)
#define DHT11_DQ_OUT_LOW HAL_GPIO_WritePin(GPIOA,GPIO_PIN_1,GPIO_PIN_RESET)
#define DHT11_DQ_IN HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_1)
//IO方向设置
void DS18B20_IO_IN(void);
void DS18B20_IO_OUT(void);
uint8_t DHT11_Init(void);//初始化DHT11
uint8_t DHT11_Read_Data(uint16_t *temp,uint16_t *humi);//读取温湿度
uint8_t DHT11_Read_Byte(void);//读出一个字节
uint8_t DHT11_Read_Bit(void);//读出一个位
uint8_t DHT11_Check(void);//检测是否存在DHT11
void DHT11_Rst(void);//复位DHT11
#endif
2在定时文件中添加计时
利用定时实现数
在tim.c中末尾添加如下函数利用定时其2实现的
/* USER CODE BEGIN 1 */
void delay_us(uint16_t us)
{
uint16_t differ = 0xffff-us-5;
__HAL_TIM_SET_COUNTER(&htim2,differ);
HAL_TIM_Base_Start(&htim2);
while(differ < 0xffff-5)
{
differ = __HAL_TIM_GET_COUNTER(&htim2);
}
HAL_TIM_Base_Stop(&htim2);
}
void delay_ms(uint16_t ms){
for(int i=0;i<ms;i++){
delay_us(1000);
}
}
void delay_s(uint16_t s){
for(int i=0;i<s;i++){
delay_ms(1000);
}
}
/* USER CODE END 1 */
tim.h
/* USER CODE BEGIN Includes */
void delay_us(uint16_t us);
void delay_ms(uint16_t ms);
void delay_s(uint16_t s);
/* USER CODE END Includes */3调用DHT11函数
添加库文件
/* USER CODE BEGIN Includes */
#include "DHT11.h"
#include "stdio.h"
/* USER CODE END Includes */main函数
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
uint16_t wen_du;//温度
uint16_t shi_du;//湿度
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if(DHT11_Init()){//判断是否有DHT11
uint8_t data[]={"没有检测到DHT11"};
HAL_UART_Transmit(&huart1,data,sizeof(data),20);
}else{
//采集数据
DHT11_Init();
DHT11_Read_Data(&wen_du,&shi_du);
//存储数据
char DHT11_data1[2];
char DHT11_data2[2];
char DHT11_data3[2];
char DHT11_data4[2];
//数据转换//转换成字符
sprintf(DHT11_data1,"%d",(wen_du>>8));//温度高8位
sprintf(DHT11_data2,"%d",(wen_du&0xff));//温度低8位
sprintf(DHT11_data3,"%d",(shi_du>>8));//湿度高8位
sprintf(DHT11_data4,"%d",(shi_du&0xff));//湿度低8位
//符号
uint8_t wen_du_zi[]={"温度为:"};
uint8_t shi_du_zi[]={"湿度为:"};
uint8_t dian[]={"."};
uint8_t bai_fen_hao[]={"%"};
uint8_t wen_du_fu[]={"°C"};
//显示数据
HAL_UART_Transmit(&huart1,wen_du_zi,sizeof(wen_du_zi),20);//温度为
HAL_UART_Transmit(&huart1,(uint8_t*)DHT11_data1,sizeof(DHT11_data1),20);//整数
HAL_UART_Transmit(&huart1,dian,1,20);
HAL_UART_Transmit(&huart1,(uint8_t*)DHT11_data2,sizeof(DHT11_data2),20);//小数
HAL_UART_Transmit(&huart1,wen_du_fu,4,20);//符号
delay_s(1);
HAL_UART_Transmit(&huart1,shi_du_zi,sizeof(shi_du_zi),20);//湿度为
HAL_UART_Transmit(&huart1,(uint8_t*)DHT11_data3,sizeof(DHT11_data3),20);//整数
HAL_UART_Transmit(&huart1,dian,1,20);
HAL_UART_Transmit(&huart1,(uint8_t*)DHT11_data4,sizeof(DHT11_data4),20);//小数
HAL_UART_Transmit(&huart1,bai_fen_hao,1,20);//符号
}
delay_s(1);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
main.h文件
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "DHT11.h"
#include "stdio.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
uint16_t wen_du;//温度
uint16_t shi_du;//湿度
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if(DHT11_Init()){//判断是否有DHT11
uint8_t data[]={"没有检测到DHT11"};
HAL_UART_Transmit(&huart1,data,sizeof(data),20);
}else{
//采集数据
DHT11_Init();
DHT11_Read_Data(&wen_du,&shi_du);
//存储数据
char DHT11_data1[2];
char DHT11_data2[2];
char DHT11_data3[2];
char DHT11_data4[2];
//数据转换//转换成字符
sprintf(DHT11_data1,"%d",(wen_du>>8));//温度高8位
sprintf(DHT11_data2,"%d",(wen_du&0xff));//温度低8位
sprintf(DHT11_data3,"%d",(shi_du>>8));//湿度高8位
sprintf(DHT11_data4,"%d",(shi_du&0xff));//湿度低8位
//符号
uint8_t wen_du_zi[]={"温度为:"};
uint8_t shi_du_zi[]={"湿度为:"};
uint8_t dian[]={"."};
uint8_t bai_fen_hao[]={"%"};
uint8_t wen_du_fu[]={"°C"};
//显示数据
HAL_UART_Transmit(&huart1,wen_du_zi,sizeof(wen_du_zi),20);//温度为
HAL_UART_Transmit(&huart1,(uint8_t*)DHT11_data1,sizeof(DHT11_data1),20);//整数
HAL_UART_Transmit(&huart1,dian,1,20);
HAL_UART_Transmit(&huart1,(uint8_t*)DHT11_data2,sizeof(DHT11_data2),20);//小数
HAL_UART_Transmit(&huart1,wen_du_fu,4,20);//符号
delay_s(1);
HAL_UART_Transmit(&huart1,shi_du_zi,sizeof(shi_du_zi),20);//湿度为
HAL_UART_Transmit(&huart1,(uint8_t*)DHT11_data3,sizeof(DHT11_data3),20);//整数
HAL_UART_Transmit(&huart1,dian,1,20);
HAL_UART_Transmit(&huart1,(uint8_t*)DHT11_data4,sizeof(DHT11_data4),20);//小数
HAL_UART_Transmit(&huart1,bai_fen_hao,1,20);//符号
}
delay_s(1);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
本人的下载资源中有完整的项目(免费下载)