引言
在当今智能化、网络化的时代,各种电子设备间的高效通信成为了技术发展的关键。而控制器局域网络(Controller Area Network,简称CAN),作为嵌入式系统中不可或缺的通信协议,正扮演着链接桥梁的重要角色。本文将带各位小伙伴深入了解CAN接口的基本原理。
CAN总线介绍
CAN总线采用广播通信模式,意味着网络中的每一节点都能接收传播于总线上的所有数据报文,并非定向传输至特定节点。这一特性确保了信息的广泛可达性,不过,各节点并非被动接受所有信息。实际上,CAN技术内置的硬件过滤机制使得每个节点能智能化筛选,仅对与其相关的报文作出响应,实现了有效的信息过滤与处理策略。
总线采用不归零制编码结合线与逻辑设计,确保了信号的稳定传输。在此机制下,各个模块经由线与逻辑相连至总线,这意味着当单一节点输出逻辑0时,即使其余节点均发出逻辑1,总线信号也会被强势界定为逻辑0,体现了总线在信号竞争中的独断性。
CAN总线上的电平
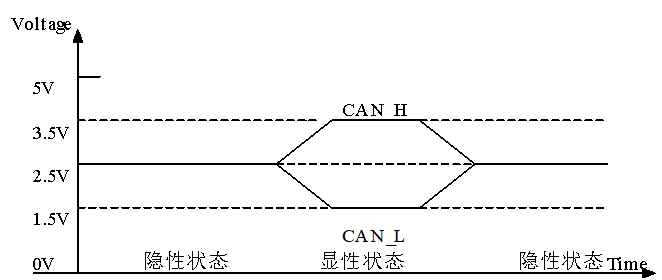
CAN2.0A/B标准规定:总线空闲时,CAN_H和CAN_L上的电压为2.5V;
在数据传输时,显性电平(逻辑 0):CAN_H 3.5V CAN_L 1.5V;
隐性电平(逻辑 1):CAN_H 2.5V CAN_L 2.5V;
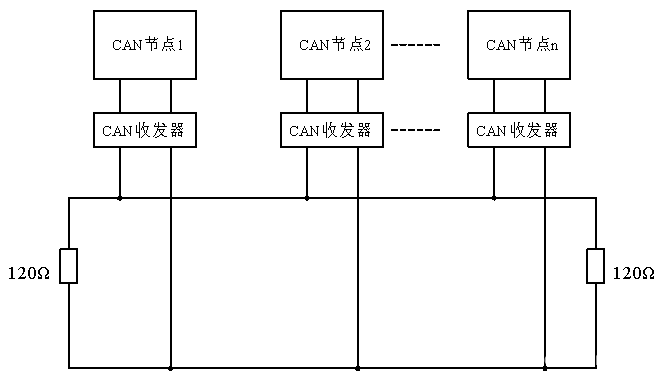
CAN标准定义四种不同的报文类型(数据帧、远程帧、错误帧、过载帧)。报文使用逐位仲裁智能方案来控制对总线的访问,每条报文都带有优先级标记,在协议中规定ID小则优先级高。CAN总线拓扑图如下图:
ElfBoard开发板 CAN接口硬件电路介绍
ELF 1开发板在其底板上集成了1路CAN接口,而ELF 1S开发板则通过扩展板增设了额外的1路CAN接口,这一接口经由3.81mm间距的绿色端子引出。
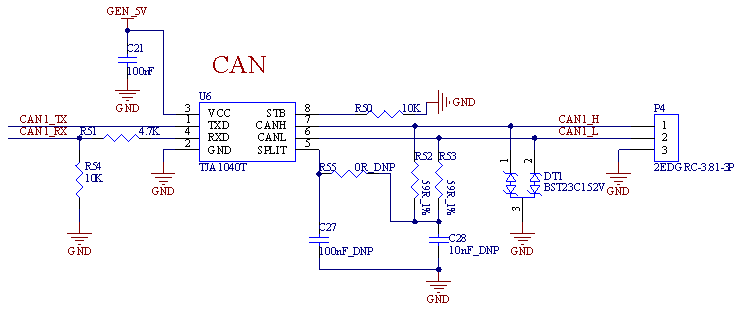
当前,ELF 1开发板搭载了TJA1040T型CAN收发器。关于CAN模块原理图如下图所示。考虑到TJA1040T器件的输出端RX输出的是5V电平信号,这可能对核心板的3.3V工作电压环境构成兼容性挑战。为保护核心板,采取了电压匹配措施:通过电阻R51和R54实施分压,将RX信号平滑过渡至3.3V,随后安全送至处理器的CAN1_RX输入端口,从而保障了系统间通讯的稳定。
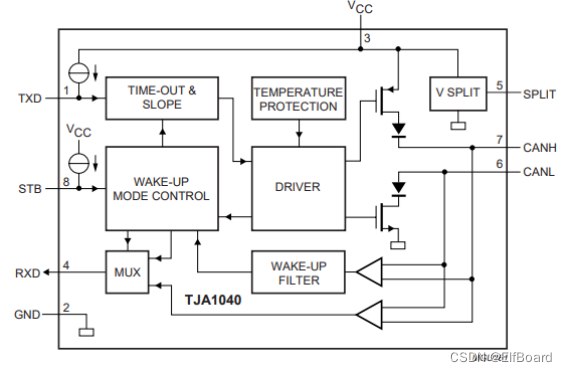
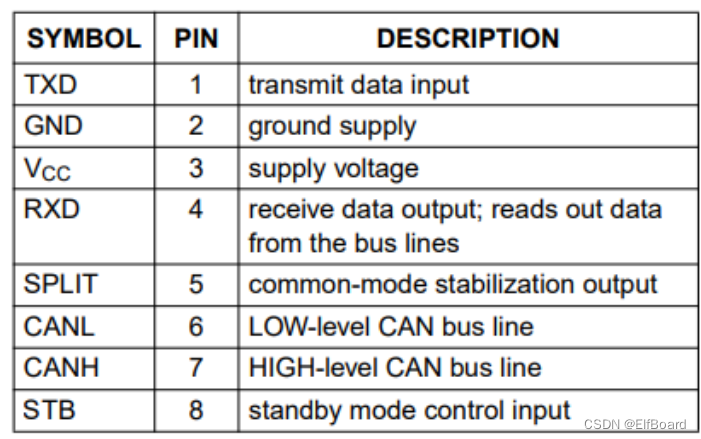
为了优化外部电路设计,各位小伙伴可以参考以下的TJA1040T芯片功能框图和引脚详解。这些资料将加速大家对TJA1040T芯片特性的理解进程。
关于CAN接口的设计建议
(1)核心板最多可支持2路CAN;
(2)设计CAN接口时要注意收发器和核心板之间的电平匹配;
(3)终端电阻可以预留插针通过跳线帽选择使用;
关于CAN接口PCB的设计建议
(1)CAN使用差分布线,预留120Ω端接电阻;
(2)连接端口建议预留地信号;
CAN接口对测
ELF 1S开发板提供两路CAN接口,CAN1 集成于底板之上,而 CAN2 则集成在扩展板上。为了实现双向 CAN 测试,需将 CAN1 与 CAN2 两端的信号线对应相连——即高位H线相互接通,低位L线同样相连,以确保两者间的直接通信链路畅通无阻。

开发板启动之后,在命令行输入以下命令,对CAN1配置波特率为125000:
root@ELF1:~# ifconfig can0 down //关闭can1
root@ELF1:~# ip link set can0 up type can bitrate 125000 triple-sampling on //设置can1波特率
flexcan 2090000.can can0:writing ctrl=0x0e312085
IPV6:ADDRCONF(NETDEV_CHANGE):can0:link becomes ready
root@ELF1:~# ifconfig can0 up //开启can1对CAN2配置波特率为125000:
root@ELF1:~# ifconfig can1 down //关闭can2
root@ELF1:~# ip link set can1 up type can bitrate 125000 triple-sampling on //设置can2波特率
flexcan 2094000.can can1:writing ctrl=0x0e312085
IPV6:ADDRCONF(NETDEV_CHANGE):can0:link becomes ready
root@ELF1:~# ifconfig can1 up //开启can2设置CAN2接收数据:
root@ELF1:~# candump can1 & //can2以后台方式接收数据
[1] 686CAN1发送数据:
root@ELF1:~# cansend can0 123#1234567891234567 //can1发送数据
root@ELF1:~# can1 123 [8] 12 34 56 78 91 23 45 67 //can2接收到数据CAN2接收到CAN1发送的数据。
至此就完成了对CAN接口的介绍,期待这篇文章能让各位小伙伴对CAN接口有一个全面而深入的理解,推进各位嵌入式爱好者在学习的道路上不断前进。