一、数据标注
由于旋转目标标注与传统的目标检测标注有一定的区别,故使用roLabelImg或者labelimg2进行标注,以下标注软件选用的是roLabelImg。
roLabelImg下载地址:https://github.com/cgvict/roLabelImg
直接在原有的labelimg环境中使用roLabelImg,运行python roLabelImg.py

打开标注软件后,e表示标注旋转目标,w表示标注正常目标,d表示下一张,a表示上一张,c表示小幅度顺时针旋转,x表示小幅度逆时针旋转,v表示大幅度顺时针旋转,z表示大幅度逆时针旋转。
二、数据集处理
整体处理流程xml —> dota_xml —> dota_txt ----> txt
文件夹
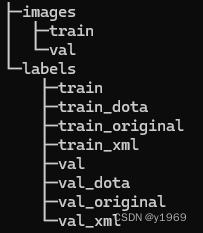
第一步:xml —> dota_xml —> dota_txt
# 文件名称 :roxml_to_dota.py
# 功能描述 :把rolabelimg标注的xml文件转换成dota能识别的xml文件,
# 再转换成dota格式的txt文件
# 把旋转框 cx,cy,w,h,angle,或者矩形框cx,cy,w,h,转换成四点坐标x1,y1,x2,y2,x3,y3,x4,y4
import os
import xml.etree.ElementTree as ET
import math
cls_list = ['1', '2', '3', '4'] #修改为自己的标签
def edit_xml(xml_file, dotaxml_file):
"""
修改xml文件
:param xml_file:xml文件的路径
:return:
"""
# dxml_file = open(xml_file,encoding='gbk')
# tree = ET.parse(dxml_file).getroot()
tree = ET.parse(xml_file)
objs = tree.findall('object')
for ix, obj in enumerate(objs):
x0 = ET.Element("x0") # 创建节点
y0 = ET.Element("y0")
x1 = ET.Element("x1")
y1 = ET.Element("y1")
x2 = ET.Element("x2")
y2 = ET.Element("y2")
x3 = ET.Element("x3")
y3 = ET.Element("y3")
# obj_type = obj.find('bndbox')
# type = obj_type.text
# print(xml_file)
if (obj.find('robndbox') == None):
obj_bnd = obj.find('bndbox')
obj_xmin = obj_bnd.find('xmin')
obj_ymin = obj_bnd.find('ymin')
obj_xmax = obj_bnd.find('xmax')
obj_ymax = obj_bnd.find('ymax')
# 以防有负值坐标
xmin = max(float(obj_xmin.text), 0)
ymin = max(float(obj_ymin.text), 0)
xmax = max(float(obj_xmax.text), 0)
ymax = max(float(obj_ymax.text), 0)
obj_bnd.remove(obj_xmin) # 删除节点
obj_bnd.remove(obj_ymin)
obj_bnd.remove(obj_xmax)
obj_bnd.remove(obj_ymax)
x0.text = str(xmin)
y0.text = str(ymax)
x1.text = str(xmax)
y1.text = str(ymax)
x2.text = str(xmax)
y2.text = str(ymin)
x3.text = str(xmin)
y3.text = str(ymin)
else:
obj_bnd = obj.find('robndbox')
obj_bnd.tag = 'bndbox' # 修改节点名
obj_cx = obj_bnd.find('cx')
obj_cy = obj_bnd.find('cy')
obj_w = obj_bnd.find('w')
obj_h = obj_bnd.find('h')
obj_angle = obj_bnd.find('angle')
cx = float(obj_cx.text)
cy = float(obj_cy.text)
w = float(obj_w.text)
h = float(obj_h.text)
angle = float(obj_angle.text)
obj_bnd.remove(obj_cx) # 删除节点
obj_bnd.remove(obj_cy)
obj_bnd.remove(obj_w)
obj_bnd.remove(obj_h)
obj_bnd.remove(obj_angle)
x0.text, y0.text = rotatePoint(cx, cy, cx - w / 2, cy - h / 2, -angle)
x1.text, y1.text = rotatePoint(cx, cy, cx + w / 2, cy - h / 2, -angle)
x2.text, y2.text = rotatePoint(cx, cy, cx + w / 2, cy + h / 2, -angle)
x3.text, y3.text = rotatePoint(cx, cy, cx - w / 2, cy + h / 2, -angle)
# obj.remove(obj_type) # 删除节点
obj_bnd.append(x0) # 新增节点
obj_bnd.append(y0)
obj_bnd.append(x1)
obj_bnd.append(y1)
obj_bnd.append(x2)
obj_bnd.append(y2)
obj_bnd.append(x3)
obj_bnd.append(y3)
tree.write(dotaxml_file, method='xml', encoding='utf-8') # 更新xml文件
# 转换成四点坐标
def rotatePoint(xc, yc, xp, yp, theta):
xoff = xp - xc
yoff = yp - yc
cosTheta = math.cos(theta)
sinTheta = math.sin(theta)
pResx = cosTheta * xoff + sinTheta * yoff
pResy = - sinTheta * xoff + cosTheta * yoff
return str(int(xc + pResx)), str(int(yc + pResy))
def totxt(xml_path, out_path):
# 想要生成的txt文件保存的路径,这里可以自己修改
files = os.listdir(xml_path)
i = 0
for file in files:
tree = ET.parse(xml_path + os.sep + file)
root = tree.getroot()
name = file.split('.')[0]
output = out_path + '/' + name + '.txt'
file = open(output, 'w')
i = i + 1
objs = tree.findall('object')
for obj in objs:
cls = obj.find('name').text
box = obj.find('bndbox')
x0 = int(float(box.find('x0').text))
y0 = int(float(box.find('y0').text))
x1 = int(float(box.find('x1').text))
y1 = int(float(box.find('y1').text))
x2 = int(float(box.find('x2').text))
y2 = int(float(box.find('y2').text))
x3 = int(float(box.find('x3').text))
y3 = int(float(box.find('y3').text))
if x0 < 0:
x0 = 0
if x1 < 0:
x1 = 0
if x2 < 0:
x2 = 0
if x3 < 0:
x3 = 0
if y0 < 0:
y0 = 0
if y1 < 0:
y1 = 0
if y2 < 0:
y2 = 0
if y3 < 0:
y3 = 0
for cls_index, cls_name in enumerate(cls_list):
if cls == cls_name:
file.write("{} {} {} {} {} {} {} {} {} {}\n".format(x0, y0, x1, y1, x2, y2, x3, y3, cls, cls_index))
file.close()
# print(output)
print(i)
if __name__ == '__main__':
# -----**** 第一步:把xml文件统一转换成旋转框的xml文件 ****-----
roxml_path = '/home/y/code/yolov8/data/lase2/labels/val_xml'
dotaxml_path = '/home/y/code/yolov8/data/lase2/labels/val_dota'
out_path = '/home/y/code/yolov8/data/lase2/labels/val_original'
filelist = os.listdir(roxml_path)
for file in filelist:
edit_xml(os.path.join(roxml_path, file), os.path.join(dotaxml_path, file))
# -----**** 第二步:把旋转框xml文件转换成txt格式 ****-----
totxt(dotaxml_path, out_path)
第二步:dota_txt —> txt
import sys
import inspect
sys.path.insert(0, '/home/y/code/yolov8')
print(sys.path)
from ultralytics.data.converter import convert_dota_to_yolo_obb
source_file = inspect.getsourcefile(convert_dota_to_yolo_obb)
print("convert_dota_to_yolo_obb 函数所在文件的路径:", source_file)
convert_dota_to_yolo_obb('/home/y/code/yolov8/data/lase2')
#关于dataobb文件下的目录下面会详细说明
注:在进行第二步之前需要做的一些代码修改
1、修改yolov8/ultralytics/data/converter.py
eg: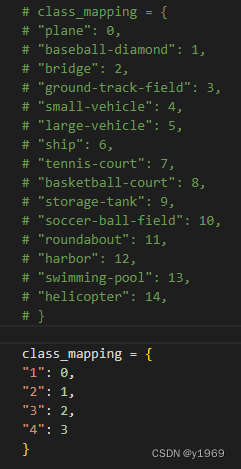
将class_mapping修改为自己的标签。
2、修改yolov8/ultralytics/cfg/models/v8/yolov8-obb.yaml

将nc修改为自己的类别数量。
3、创建训练所需的yaml文件放置在数据集文件夹中
# train and val data as 1) directory: path/images/, 2) file: path/images.txt, or 3) list: [path1/images/, path2/images/]
path: /home/y/code/yolov8/data/lase2
train: images/train # images
val: images/val # images
# number of classes
nc: 4
# class names
names:
0: ture
1: ban
2: man
3: di
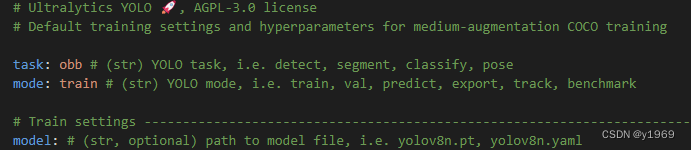
三、开始训练
1、更改/home/wangyu/code/yolov8/ultralytics/cfg/default.yaml
2、开始训练
import argparse
import sys
sys.path.append('/home/y/code/yolov8/ultralytics')
from ultralytics import YOLO
def parse_opt(known=False):
parser = argparse.ArgumentParser()
parser.add_argument('--model', type=str, default='yolov8s-obb.pt', help='initial weights path')
parser.add_argument('--epochs', type=int, default=1600, help='total training epochs')
parser.add_argument('--imgsz', type=int, default=640, help='train, val image size (pixels)')
parser.add_argument('--batch', type=str, default=2, help='total batch size for all GPUs, -1 for autobatch')
parser.add_argument('--lr0', type=str, default=0.01, help=' (float) initial learning rate (i.e. SGD=1E-2, Adam=1E-3)')
parser.add_argument('--cls', type=str, default=1.5, help=' (float) cls loss gain (scale with pixels)')
parser.add_argument('--data', type=str, default='/home/y/code/yolov8/data/lase/my-dota8-obb.yaml', help='dataset.yaml path') parser.add_argument('--workers', type=str, default=8)
parser.add_argument('--device', type=str, default=0, help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
return parser.parse_known_args()[0] if known else parser.parse_args()
def main(opt):
model = YOLO(opt.model)
model.train(data=opt.data, epochs=opt.epochs, imgsz=opt.imgsz, batch=opt.batch, device=opt.device, lr0=opt.lr0, cls=opt.cls)
model.val(imgsz=opt.imgsz)
if __name__ == '__main__':
# results,metrics,success = main()
opt = parse_opt()
main(opt)



![[2024更新]如何从Android恢复已删除的相机照片?](https://img-blog.csdnimg.cn/direct/3c0f9cd2ecb747a48c1886bd0e1e31a7.png)