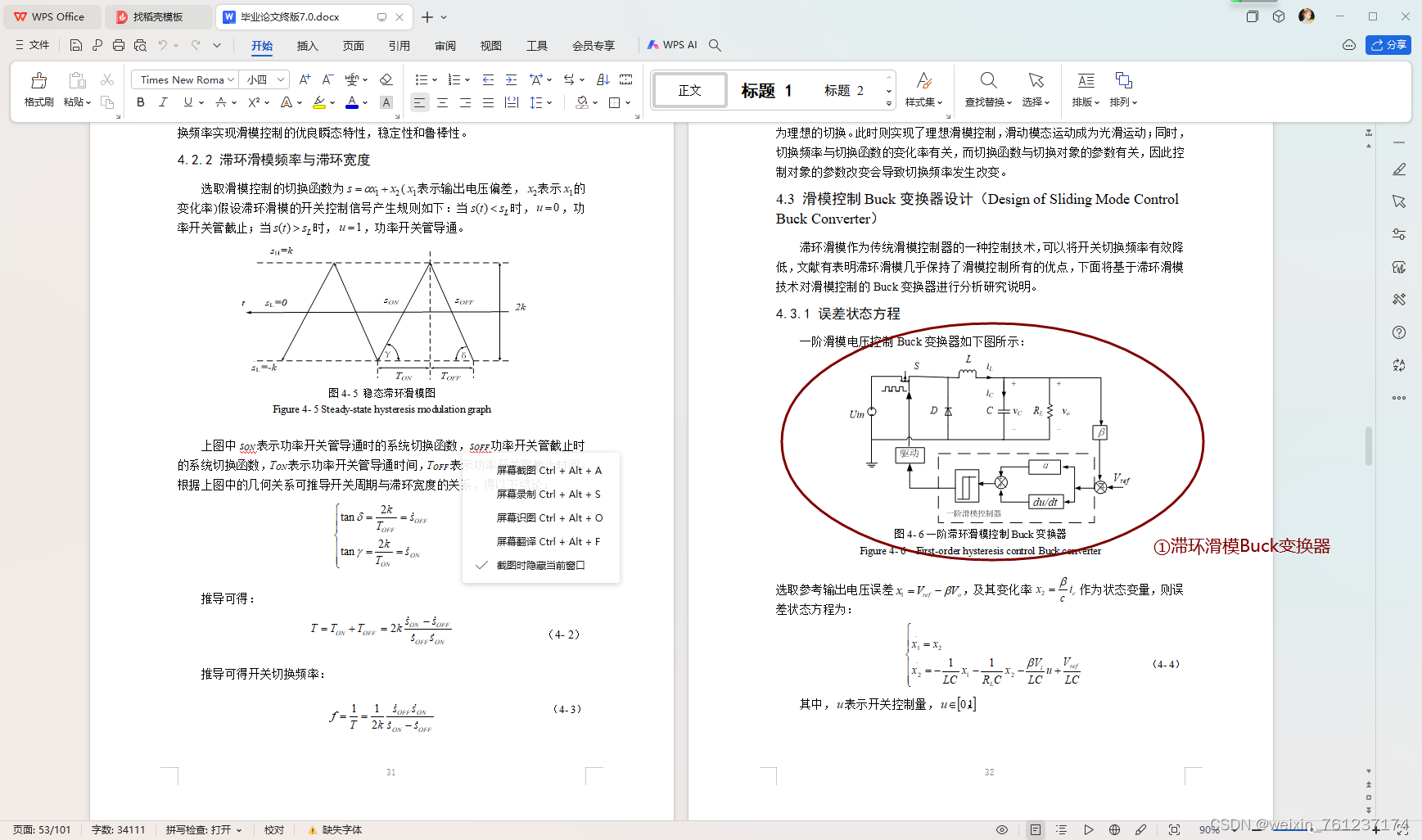
第一种,滞环滑模控制器Buck电路
在滑模控制系统中,采用滞环技术,直接将切换函数转换成开关控制信号,滞环技术被看做一种降低系统结构的切换频率的调制方法,业界也把基于滞环滑模技术实现的滑模控制称为直接滑模控制技术,滞环滑模技术是一种最真实贴切于滑模控制律的有效技术。
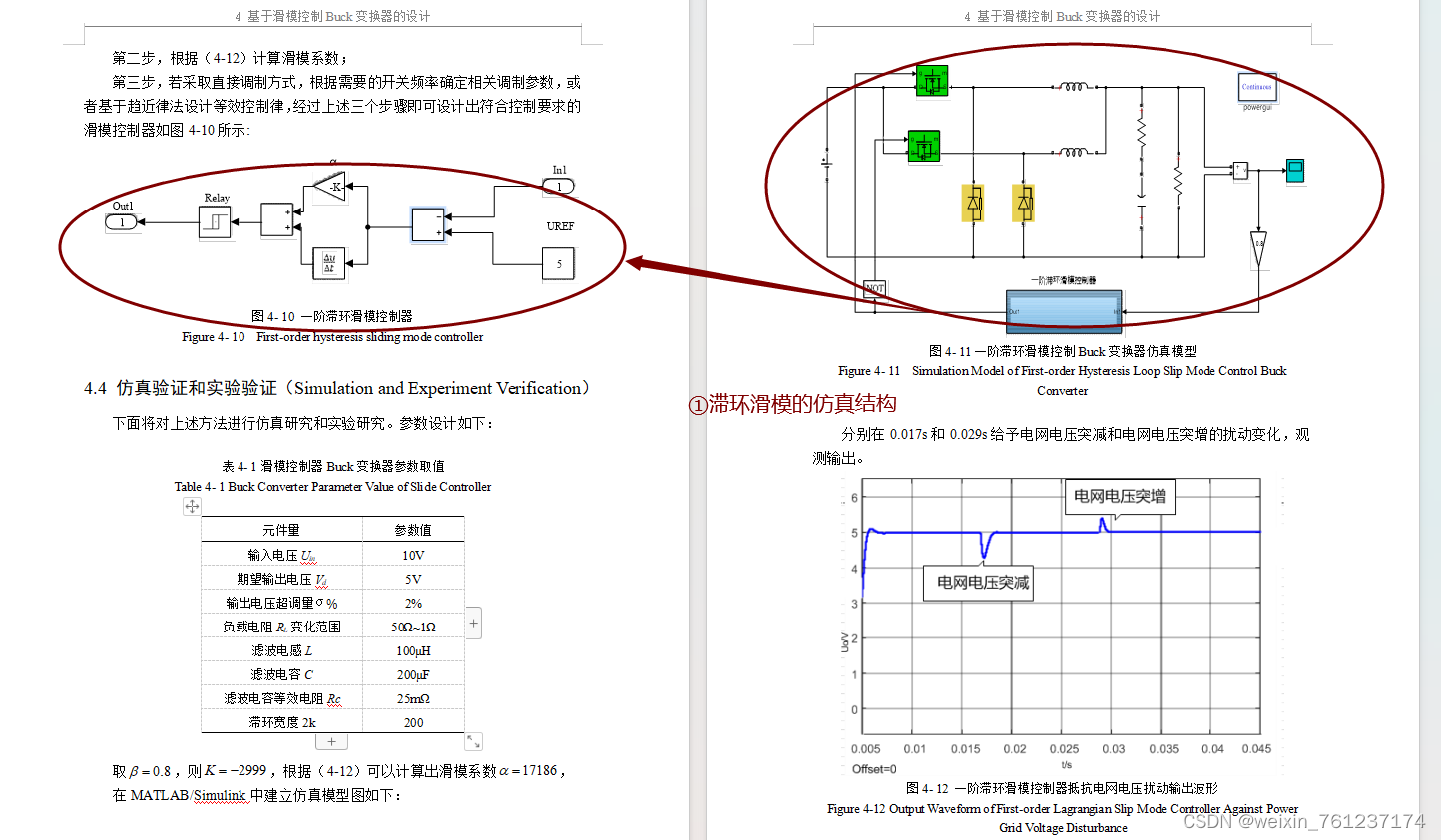
第二种:定频滑模技术
固定开关频率的必要性具体表现在:
(1)固定的开关频率有利于滤波电路的设计。根据文献[8]Buck变换器工作原理的分析中可知,为将纹波电压限制在一定范围内,必须要依据工作频率来对输出滤波电容进行取值。当开关频率在–定范围变化时,滤波器需要按照频率的下限来取值,从而带来一定的浪费。
(2)频率的固定有利于限制电路中的开关损耗。实际电路中的器件及工作状态都是非理想的,必然存在一定的损耗。开关损耗与开关频率成正比,过高的频率将导致损耗过高,使工作效率变低甚至器件过热而损坏。
(3)开关频率的固定有利于降低变换器中的噪声。如果电子元器件的振荡频
率在人耳听觉范围之内,就会产生音频噪声,降低噪声的一个关键途径在于滤波
器的设计。
(4)对于含有变压器的开关变换器,为降低磁心损耗和防止出现磁饱和,也需要开关频率固定或将开关频率限制在一定范围内。对于如何将开关频率固定,通常有两类方法。–类是在原有滞环滑模控制的基础上加以改进,例如增加自适应前馈及反馈控制,通过对滞环宽度的实时调整来固定频率,但这种方法需要设计复杂的前馈及反馈电路。另一类方法是基于等效控制原理,通过PWM调制器来产生控制信号,因此这种方法又称为间接滑模控制。本章即采用这种方法,设计基于PWM的定频滑模控制开关变换器,以解决滞环滑模控制中开关频率变化问题。

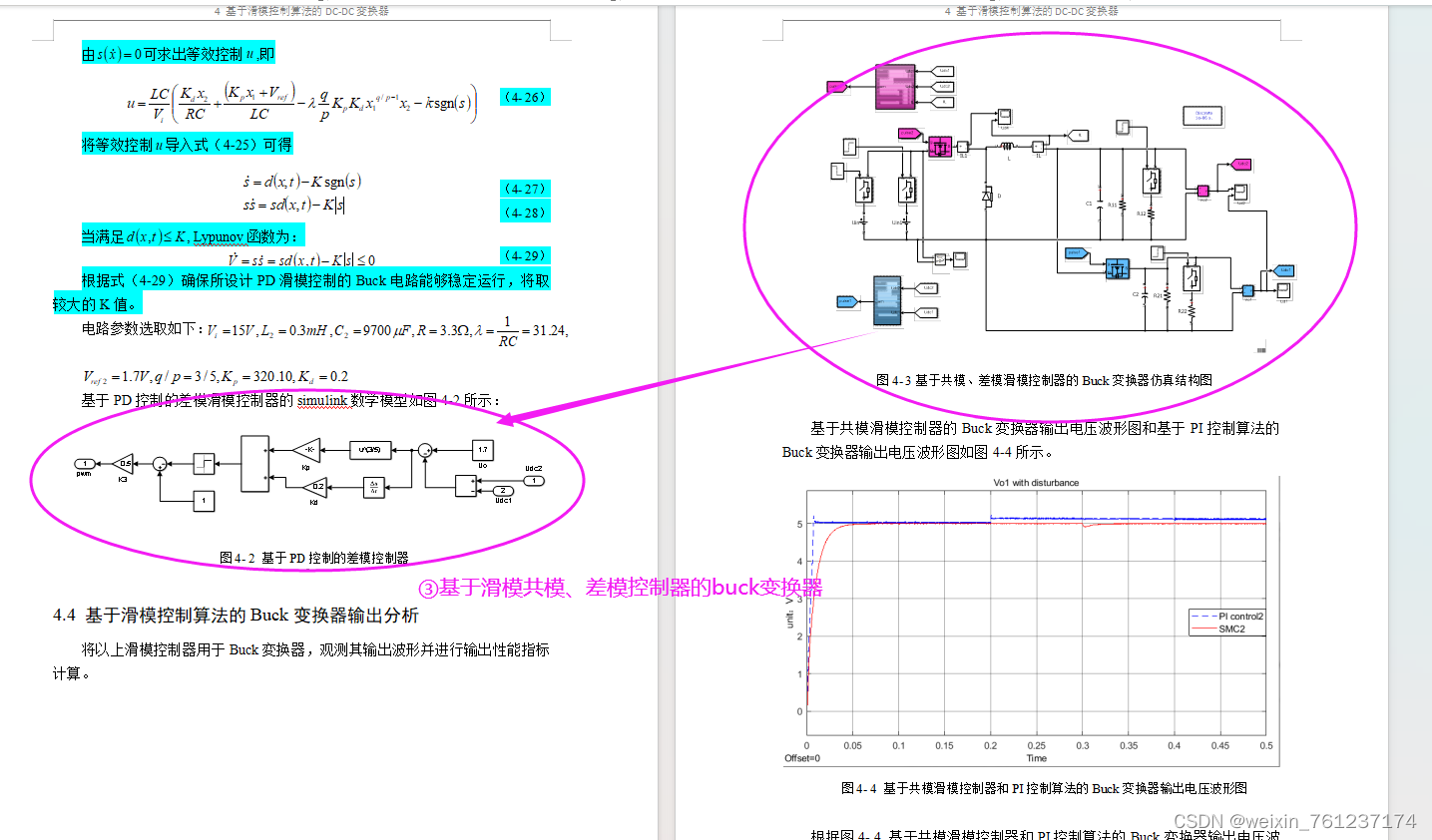
第三种:共模、差模控制器
本文首先总结DC-DC变换器的发展现状,采用buck变换器为例,介绍了DC-DC的主电路拓扑结构,分析buck电路的基本原理,利用状态空间平均法对该电路进行小信号建模,推导控制量到电感电流的传递函数和电感电流到输出电压的传递函数,根据电流、电压的传递函数频率特性曲线,选择合适的补偿控制器类型,计算其补偿器参数,搭建仿真模型,仿真验证系统输出电压的快速性和稳定性。
其次分别基于PI控制算法和滑模控制算法搭建了补偿控制器,采用试凑经验法确定了PI控制器参数后,为使PI控制效果最优化,采用了Check Step Response Characteristics模块进行PI参数的优化设计;研究滑模变结构控制策略的基本原理,结合本文所选择的主电路拓扑结构,分别采用了共模控制器和差模控制器,对两路输出分别进行调制:其中共模控制器是根据DC-DC变换器的平均状态空间模型,确定切换函数,推导滑模变结构控制律,根据李雅普诺夫函数判断广义滑模存在性,差模控制器是基于PD终端滑模变结构控制策略的控制方式,采用比例和微分系数对滑模面进行优化设计,利用仿真软件MATLAB/simulink搭建仿真模型,对DC-DC变换器两路工作方式下的输出电压进行仿真测试。
最后分别进行了输入电压阶跃变化、输出负载电流阶跃变化时的仿真,比较滑模变结构控制策略和PI控制策略的输出电压波形,验证滑模变结构控制策略在各种工况下的控制优越性。