1.总结任务调度算法之间的区别,重新实现一遍任务调度算法的代码。
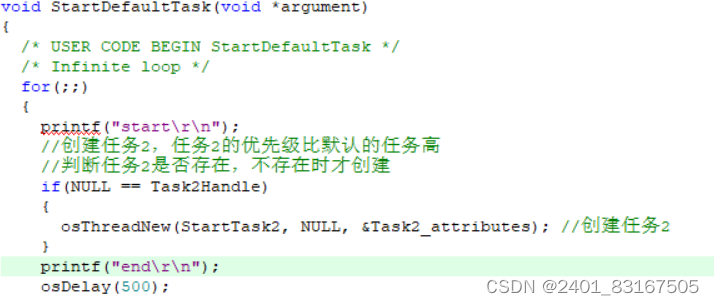
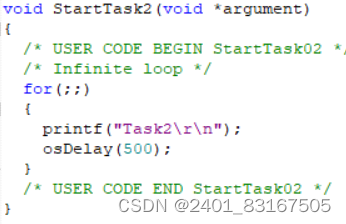
抢占式调度:高优先级的任务可以打断低优先级的任务执行
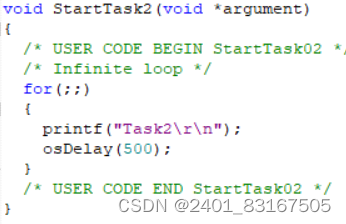
时间片轮转:相同优先级的任务有相同的时间片(1ms),时间片耗尽任务会强制退出
协作式调度:任务主动调用osDelay函数,主动放弃对CPU的占用,让其他任务执行
抢占式调度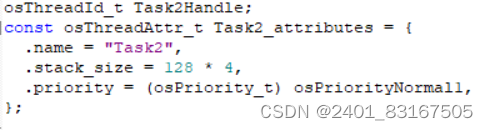

时间片轮转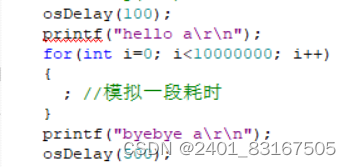

2.总结静态创建任务和动态创建任务的区别,以及动态创建任务和静态创建任务的源码分析步骤。
区别:①动态创建不需要提供栈,只需要确定栈的大小,静态创建需要自己提供栈和创建栈的空间
②动态创建适用于需要随时创建任务和删除任务的场景,静态创建适用于任务数量确定的场景
③动态创建要消耗更多的资源,因为在程序运行时创建,静态创建消耗的资源比较少,因为他已经被提前创建
④动态创建更加灵活
动态创建:需要提前创建一个osThreadId_t变量,然后填充osThreadAttr_t结构体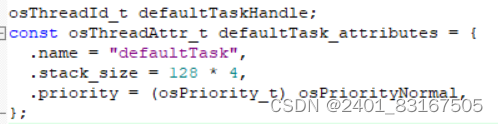 ,再申明一个开始任务函数
,再申明一个开始任务函数![]() ,并在下面的代码中定义该函数
,并在下面的代码中定义该函数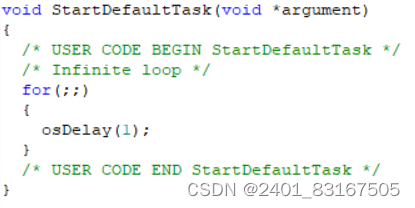
静态创建:需要提前创建一个osThreadId_t变量,一个uint32_t[64]变量,一个osStaticThreadDef_t变量,然后再填充osThreadAttr_t结构体,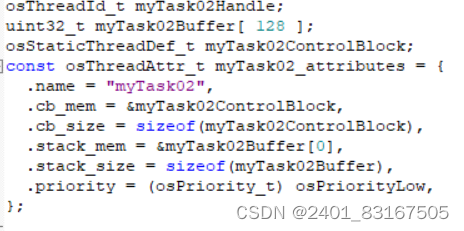
再申明一个开始任务函数![]() ,并在下面的代码中定义该函数
,并在下面的代码中定义该函数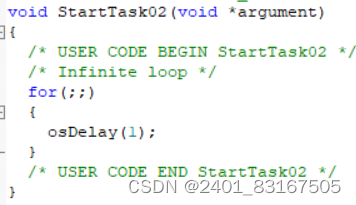
3.总结任务的状态,以及任务状态之间的转换关系。
就绪态:任务被创建时就进入就绪态
运行态:任务代码正在运行
阻塞态:任务在等待某件事情停止运行
挂起态:任务被挂起就不能再执行
转换关系
就绪态任务被调度器选择就会进入运行态
运行态任务使用休眠函数或者等待信号量就会进入阻塞态
阻塞态任务等待的事情结束就会进入就绪态
就绪态、运行态、阻塞态任务都可以用vTaskSuspend函数进入挂起,使用vTaskResume函数解除挂起,进入就绪态