/*
* stereo_match.cpp
* calibration
*
* 创建者 Victor Eruhimov,日期为 2010年1月18日。
* 版权所有 2010 Argus Corp.
*
*/
#include "opencv2/calib3d/calib3d.hpp" // 导入OpenCV相机标定和三维重建相关的头文件
#include "opencv2/imgproc.hpp" // 导入OpenCV图像处理相关的头文件
#include "opencv2/imgcodecs.hpp" // 导入OpenCV图像编解码相关的头文件
#include "opencv2/highgui.hpp" // 导入OpenCV高层GUI(图形界面)相关的头文件
#include "opencv2/core/utility.hpp" // 导入OpenCV核心工具(utility)模块的头文件
#include <stdio.h> // 导入C标准输入输出头文件
#include <sstream> // 导入C++字符串流处理头文件
using namespace cv; // 使用OpenCV的命名空间
// 声明了print_help函数,用于显示帮助信息
static void print_help(char** argv)
{
// 打印使用demo时的帮助信息
printf("\nDemo stereo matching converting L and R images into disparity and point clouds\n");
// 打印程序使用方式的说明
printf("\nUsage: %s <left_image> <right_image> [--algorithm=bm|sgbm|hh|hh4|sgbm3way] [--blocksize=<block_size>]\n"
"[--max-disparity=<max_disparity>] [--scale=scale_factor>] [-i=<intrinsic_filename>] [-e=<extrinsic_filename>]\n"
"[--no-display] [--color] [-o=<disparity_image>] [-p=<point_cloud_file>]\n", argv[0]);
}
// 声明了saveXYZ函数,用于将三维点云数据保存到文件
static void saveXYZ(const char* filename, const Mat& mat)
{
// 设置三维点深度的最大值
const double max_z = 1.0e4;
// 以文本写入方式打开文件
FILE* fp = fopen(filename, "wt");
// 遍历图像的每个像素点
for(int y = 0; y < mat.rows; y++)
{
for(int x = 0; x < mat.cols; x++)
{
// 读取每个像素点的三维坐标
Vec3f point = mat.at<Vec3f>(y, x);
// 如果该点的Z坐标无效,则忽略此点
if(fabs(point[2] - max_z) < FLT_EPSILON || fabs(point[2]) > max_z) continue;
// 将有效的三维坐标写入到文件中
fprintf(fp, "%f %f %f\n", point[0], point[1], point[2]);
}
}
// 关闭文件
fclose(fp);
}
int main(int argc, char** argv)
{
// 定义了一系列的字符串变量用来存储命令行参数
std::string img1_filename = "";
std::string img2_filename = "";
std::string intrinsic_filename = "";
std::string extrinsic_filename = "";
std::string disparity_filename = "";
std::string point_cloud_filename = "";
// 定义了枚举类型,列出了所有双目算法
enum { STEREO_BM=0, STEREO_SGBM=1, STEREO_HH=2, STEREO_VAR=3, STEREO_3WAY=4, STEREO_HH4=5 };
int alg = STEREO_SGBM; // 默认使用STEREO_SGBM算法
int SADWindowSize, numberOfDisparities; // 定义了SAD窗口大小和视差的数量
bool no_display; // 定义了是否显示结果的标志位
bool color_display; // 定义了是否彩色显示视差图的标志位
float scale; // 定义了缩放因子
// 创建两种双目匹配算法实例对象:StereoBM和StereoSGBM
Ptr<StereoBM> bm = StereoBM::create(16,9);
Ptr<StereoSGBM> sgbm = StereoSGBM::create(0,16,3);
// 使用命令行解析器解析参数
cv::CommandLineParser parser(argc, argv,
"{@arg1||}{@arg2||}{help h||}{algorithm||}{max-disparity|0|}{blocksize|0|}{no-display||}{color||}{scale|1|}{i||}{e||}{o||}{p||}");
// 如果用户请求帮助,则调用print_help函数并退出
if(parser.has("help"))
{
print_help(argv);
return 0;
}
// 获取命令行中指定的左右图像文件名
img1_filename = samples::findFile(parser.get<std::string>(0));
img2_filename = samples::findFile(parser.get<std::string>(1));
// 解析算法参数
if (parser.has("algorithm"))
{
std::string _alg = parser.get<std::string>("algorithm");
alg = _alg == "bm" ? STEREO_BM :
_alg == "sgbm" ? STEREO_SGBM :
_alg == "hh" ? STEREO_HH :
_alg == "var" ? STEREO_VAR :
_alg == "hh4" ? STEREO_HH4 :
_alg == "sgbm3way" ? STEREO_3WAY : -1;
}
// 解析其他所有需要的命令行参数
numberOfDisparities = parser.get<int>("max-disparity");
SADWindowSize = parser.get<int>("blocksize");
scale = parser.get<float>("scale");
no_display = parser.has("no-display");
color_display = parser.has("color");
if( parser.has("i") )
intrinsic_filename = parser.get<std::string>("i");
if( parser.has("e") )
extrinsic_filename = parser.get<std::string>("e");
if( parser.has("o") )
disparity_filename = parser.get<std::string>("o");
if( parser.has("p") )
point_cloud_filename = parser.get<std::string>("p");
// 检查解析后的参数是否正确
if (!parser.check())
{
parser.printErrors();
return 1;
}
// 检查算法参数是否指定正确
if( alg < 0 )
{
printf("Command-line parameter error: Unknown stereo algorithm\n\n");
print_help(argv);
return -1;
}
// 检查视差数量设置是否正确
if ( numberOfDisparities < 1 || numberOfDisparities % 16 != 0 )
{
printf("Command-line parameter error: The max disparity (--maxdisparity=<...>) must be a positive integer divisible by 16\n");
print_help(argv);
return -1;
}
// 检查缩放因子是否正确
if (scale < 0)
{
printf("Command-line parameter error: The scale factor (--scale=<...>) must be a positive floating-point number\n");
return -1;
}
// 检查SAD窗口大小设置是否正确
if (SADWindowSize < 1 || SADWindowSize % 2 != 1)
{
printf("Command-line parameter error: The block size (--blocksize=<...>) must be a positive odd number\n");
return -1;
}
// 检查是否指定了左右图像文件
if( img1_filename.empty() || img2_filename.empty() )
{
printf("Command-line parameter error: both left and right images must be specified\n");
return -1;
}
// 检查内参和外参是否同时指定
if( (!intrinsic_filename.empty()) ^ (!extrinsic_filename.empty()) )
{
printf("Command-line parameter error: either both intrinsic and extrinsic parameters must be specified, or none of them (when the stereo pair is already rectified)\n");
return -1;
}
// 检查生成点云时是否指定了内参和外参
if( extrinsic_filename.empty() && !point_cloud_filename.empty() )
{
printf("Command-line parameter error: extrinsic and intrinsic parameters must be specified to compute the point cloud\n");
return -1;
}
// 根据算法的不同,设置图像的加载模式
int color_mode = alg == STEREO_BM ? 0 : -1;
// 加载左右视图图像
Mat img1 = imread(img1_filename, color_mode);
Mat img2 = imread(img2_filename, color_mode);
// 如果左视图图像加载失败,打印错误并退出
if (img1.empty())
{
printf("Command-line parameter error: could not load the first input image file\n");
return -1;
}
// 如果右视图图像加载失败,打印错误并退出
if (img2.empty())
{
printf("Command-line parameter error: could not load the second input image file\n");
return -1;
}
// 如果缩放系数不等于1,则对图像进行缩放
if (scale != 1.f)
{
// 定义两个临时矩阵用于存储缩放后的图像
Mat temp1, temp2;
// 根据scale的大小选择合适的插值方法
int method = scale < 1 ? INTER_AREA : INTER_CUBIC;
// 对左右图像进行缩放
resize(img1, temp1, Size(), scale, scale, method);
img1 = temp1;
resize(img2, temp2, Size(), scale, scale, method);
img2 = temp2;
}
// 获取缩放后的图像大小
Size img_size = img1.size();
// 定义两个ROI区域以及Q矩阵(用于三维重建)
Rect roi1, roi2;
Mat Q;
// 如果内参文件名不为空,则读取内(camera)参和外(stereo)参数
if( !intrinsic_filename.empty() )
{
// 读取内参文件
FileStorage fs(intrinsic_filename, FileStorage::READ);
if(!fs.isOpened())
{
printf("Failed to open file %s\n", intrinsic_filename.c_str());
return -1;
}
// 读取内参矩阵和畸变系数
Mat M1, D1, M2, D2;
fs["M1"] >> M1;
fs["D1"] >> D1;
fs["M2"] >> M2;
fs["D2"] >> D2;
// 根据缩放因子调整内参矩阵
M1 *= scale;
M2 *= scale;
// 读取外参文件
fs.open(extrinsic_filename, FileStorage::READ);
if(!fs.isOpened())
{
printf("Failed to open file %s\n", extrinsic_filename.c_str());
return -1;
}
// 读取旋转矩阵和平移矩阵
Mat R, T, R1, P1, R2, P2;
fs["R"] >> R;
fs["T"] >> T;
// 对立体图像进行校正
stereoRectify( M1, D1, M2, D2, img_size, R, T, R1, R2, P1, P2, Q, CALIB_ZERO_DISPARITY, -1, img_size, &roi1, &roi2 );
// 初始化校正映射矩阵
Mat map11, map12, map21, map22;
initUndistortRectifyMap(M1, D1, R1, P1, img_size, CV_16SC2, map11, map12);
initUndistortRectifyMap(M2, D2, R2, P2, img_size, CV_16SC2, map21, map22);
// 应用映射矩阵进行畸变校正和立体校正
Mat img1r, img2r;
remap(img1, img1r, map11, map12, INTER_LINEAR);
remap(img2, img2r, map21, map22, INTER_LINEAR);
// 更新校正后的图像
img1 = img1r;
img2 = img2r;
}
// 计算或更新视差的数量
numberOfDisparities = numberOfDisparities > 0 ? numberOfDisparities : ((img_size.width/8) + 15) & -16;
// 配置块匹配(Block Matching)算法的参数
// 设置块匹配算法的区域兴趣(ROI),由roi1和roi2的矩形区域定义。
bm->setROI1(roi1);
bm->setROI2(roi2);
// 设置前置滤波器的上限值用于块匹配算法。
bm->setPreFilterCap(31);
// 设置SAD窗口的大小,比较块大小。如果SADWindowSize变量大于0,就使用该变量的值,否则使用默认值9。
bm->setBlockSize(SADWindowSize > 0 ? SADWindowSize : 9);
// 设置最小视差,默认为0。
bm->setMinDisparity(0);
// 设置视差的数量,这里使用numberOfDisparities变量的值。
bm->setNumDisparities(numberOfDisparities);
// 设置纹理阈值,用于过滤掉纹理不够的区域。
bm->setTextureThreshold(10);
// 设置唯一性比例,用于判断最佳视差的唯一性。
bm->setUniquenessRatio(15);
// 设置视差连通区域变化的窗口大小,这里为100。
bm->setSpeckleWindowSize(100);
// 设置视差连通区域的最大视差变化范围,这里为32。
bm->setSpeckleRange(32);
// 设置左右视差图的最大差异,超过这个差异的视差值会被剔除。
bm->setDisp12MaxDiff(1);
// 配置半全局块匹配(Semi-Global Block Matching)算法的参数
// 为半全局块匹配算法设置前置滤波器的上限值。
sgbm->setPreFilterCap(63);
// 计算SGBM算法的SAD窗口大小,如果SADWindowSize变量大于0,使用该变量的值,否则使用默认值3。
int sgbmWinSize = SADWindowSize > 0 ? SADWindowSize : 3;
// 设置SGBM算法的块大小。
sgbm->setBlockSize(sgbmWinSize);
// 根据输入图像的通道数计算常数值。
int cn = img1.channels();
// 设置SGBM算法的P1和P2参数,这些参数控制视差变化的平滑程度。
sgbm->setP1(8*cn*sgbmWinSize*sgbmWinSize);
sgbm->setP2(32*cn*sgbmWinSize*sgbmWinSize);
// 设置最小视差,默认为0。
sgbm->setMinDisparity(0);
// 设置视差数量,这里使用numberOfDisparities变量的值。
sgbm->setNumDisparities(numberOfDisparities);
// 设置唯一性比例,用于判断最佳视差的唯一性。
sgbm->setUniquenessRatio(10);
// 设置视差连通区域变化的窗口大小,这里为100。
sgbm->setSpeckleWindowSize(100);
// 设置视差连通区域的最大视差变化范围,这里为32。
sgbm->setSpeckleRange(32);
// 设置左右视差图的最大差异,超过这个差异的视差值会被剔除。
sgbm->setDisp12MaxDiff(1);
// 根据选择的算法设置SGBM模式。
if(alg==STEREO_HH)
sgbm->setMode(StereoSGBM::MODE_HH);
else if(alg==STEREO_SGBM)
sgbm->setMode(StereoSGBM::MODE_SGBM);
else if(alg==STEREO_HH4)
sgbm->setMode(StereoSGBM::MODE_HH4);
else if(alg==STEREO_3WAY)
sgbm->setMode(StereoSGBM::MODE_SGBM_3WAY);
Mat disp, disp8; // 定义存储视差图和转换后的8位视差图的矩阵。
// 获取当前的时间刻度,用于计算视差计算的耗时。
int64 t = getTickCount();
float disparity_multiplier = 1.0f; // 定义视差倍数的默认值。
// 根据选定的算法执行视差计算,并根据返回的数据类型设置合适的倍数。
if( alg == STEREO_BM )
{
bm->compute(img1, img2, disp); // 使用BM算法计算视差。
if (disp.type() == CV_16S)
disparity_multiplier = 16.0f; // 如果视差图是16位有符号整型,则将倍数设为16。
}
else if( alg == STEREO_SGBM || alg == STEREO_HH || alg == STEREO_HH4 || alg == STEREO_3WAY )
{
sgbm->compute(img1, img2, disp); // 使用SGBM算法族计算视差。
if (disp.type() == CV_16S)
disparity_multiplier = 16.0f; // 如果视差图是16位有符号整型,则将倍数设为16。
}
t = getTickCount() - t; // 计算视差计算耗时。
printf("Time elapsed: %fms\n", t*1000/getTickFrequency()); // 打印耗时信息。
// 将计算出的视差图转换为8位图像以供显示或存储。
if( alg != STEREO_VAR )
disp.convertTo(disp8, CV_8U, 255/(numberOfDisparities*16.));
else
disp.convertTo(disp8, CV_8U);
Mat disp8_3c; // 定义用于显示彩色视差图的矩阵。
// 如果选项设置为显示彩色图,则对8位图像应用色彩映射。
if (color_display)
cv::applyColorMap(disp8, disp8_3c, COLORMAP_TURBO);
// 如果指定了视差图文件名,则将视差图存储到文件中。
if(!disparity_filename.empty())
imwrite(disparity_filename, color_display ? disp8_3c : disp8);
// 如果指定了点云文件名,则保存点云数据到文件中。
if(!point_cloud_filename.empty())
{
printf("storing the point cloud..."); // 打印存储点云数据的信息。
fflush(stdout);
Mat xyz; // 定义用于存储3D坐标的矩阵。
Mat floatDisp; // 定义用于存储转换后的视差图的矩阵。
// 将视差图转换为浮点型,并应用视差倍数。
disp.convertTo(floatDisp, CV_32F, 1.0f / disparity_multiplier);
// 使用Q矩阵将视差图重投影到3D坐标。
reprojectImageTo3D(floatDisp, xyz, Q, true);
// 使用saveXYZ函数将3D坐标保存到指定的点云文件中。
saveXYZ(point_cloud_filename.c_str(), xyz);
printf("\n"); // 用于换行。
}
// 如果未设置不显示结果,则创建显示左、右图像和视差图的窗口。
if( !no_display )
{
std::ostringstream oss; // 使用字符串流构建显示的标题。
oss << "disparity " << (alg==STEREO_BM ? "bm" :
alg==STEREO_SGBM ? "sgbm" :
alg==STEREO_HH ? "hh" :
alg==STEREO_VAR ? "var" :
alg==STEREO_HH4 ? "hh4" :
alg==STEREO_3WAY ? "sgbm3way" : "");
oss << " blocksize:" << (alg==STEREO_BM ? SADWindowSize : sgbmWinSize);
oss << " max-disparity:" << numberOfDisparities;
std::string disp_name = oss.str(); // 从流中获取构建好的标题字符串。
// 创建并显示图像窗口。
namedWindow("left", cv::WINDOW_NORMAL);
imshow("left", img1);
namedWindow("right", cv::WINDOW_NORMAL);
imshow("right", img2);
namedWindow(disp_name, cv::WINDOW_AUTOSIZE);
imshow(disp_name, color_display ? disp8_3c : disp8);
printf("press ESC key or CTRL+C to close..."); // 提示用户如何关闭窗口。
fflush(stdout);
printf("\n"); // 用于换行。
while(1) // 循环等待用户按键操作。
{
if(waitKey() == 27) // 如果用户按下ESC键,则退出循环。
break;
}
}
return 0; // 正常结束程序。
}enum { STEREO_BM=0, STEREO_SGBM=1, STEREO_HH=2, STEREO_VAR=3, STEREO_3WAY=4, STEREO_HH4=5 };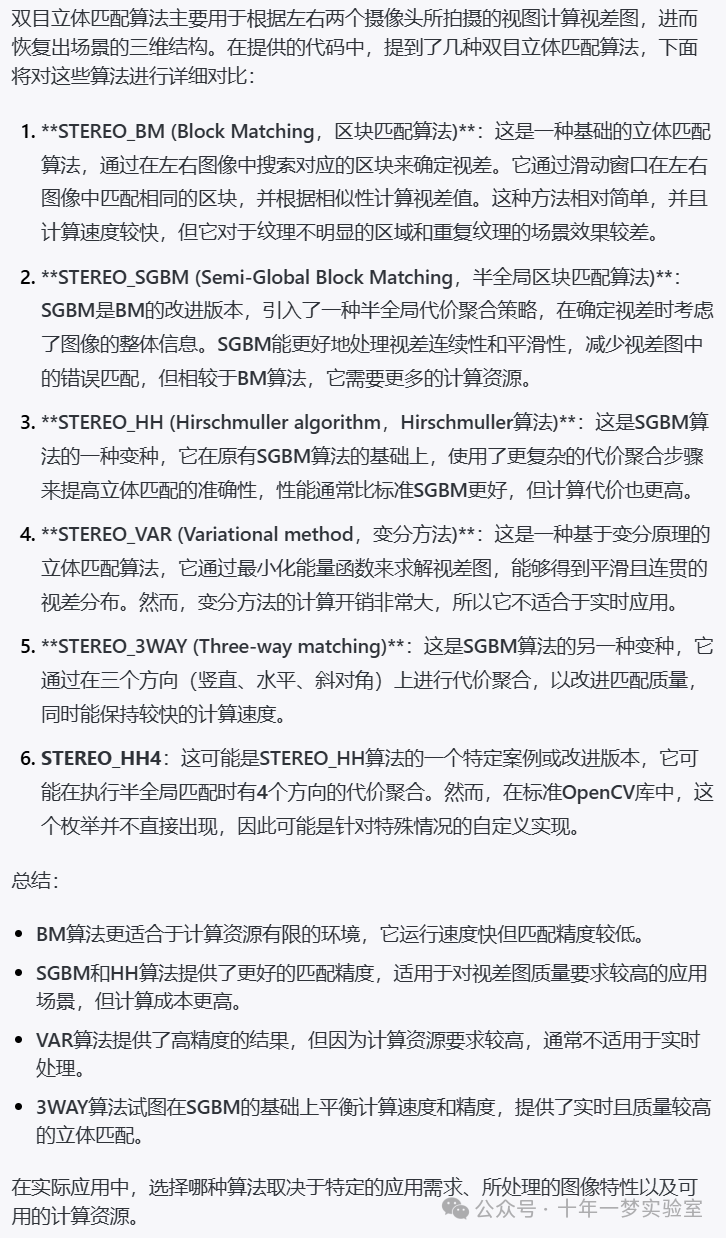
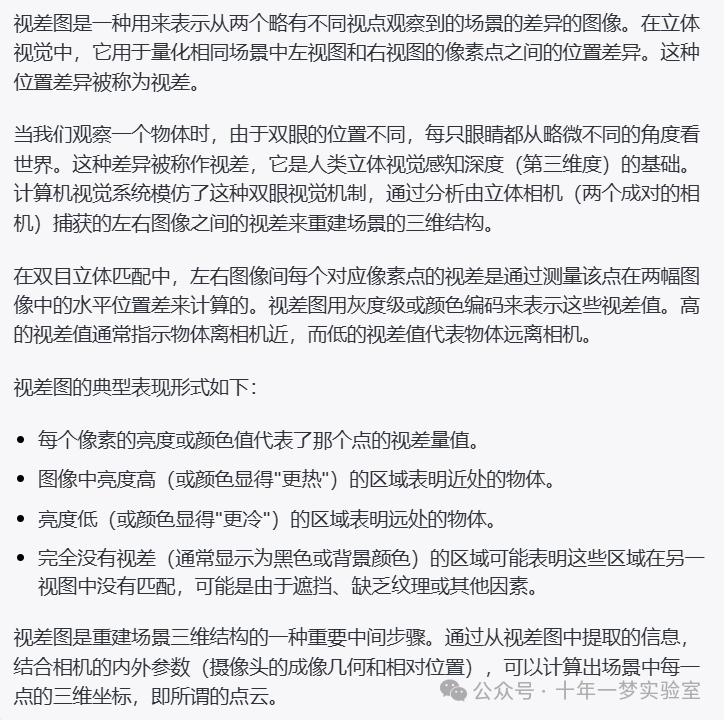
什么是视差图
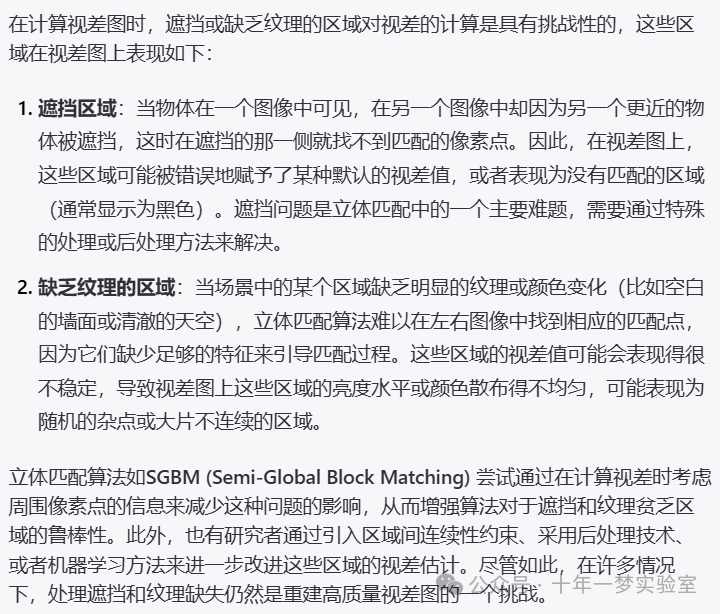
在计算视差图时,遮挡或缺乏纹理的区域会有什么表现?
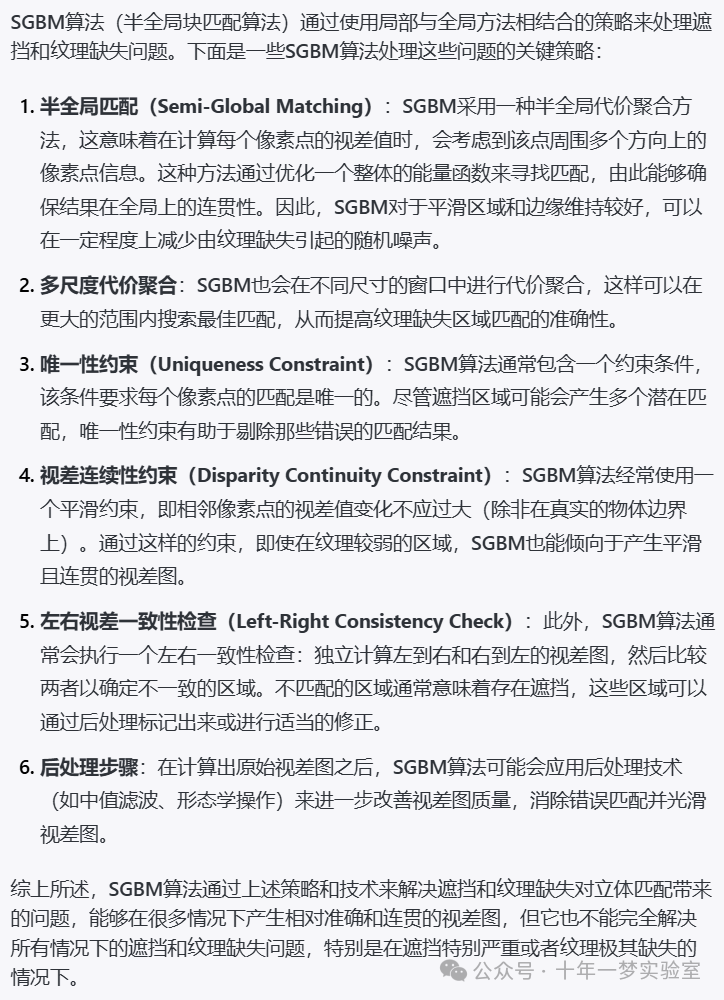
SGBM算法是如何处理遮挡和纹理缺失问题的?
stereoRectify( M1, D1, M2, D2, img_size, R, T, R1, R2, P1, P2, Q, CALIB_ZERO_DISPARITY, -1, img_size, &roi1, &roi2 );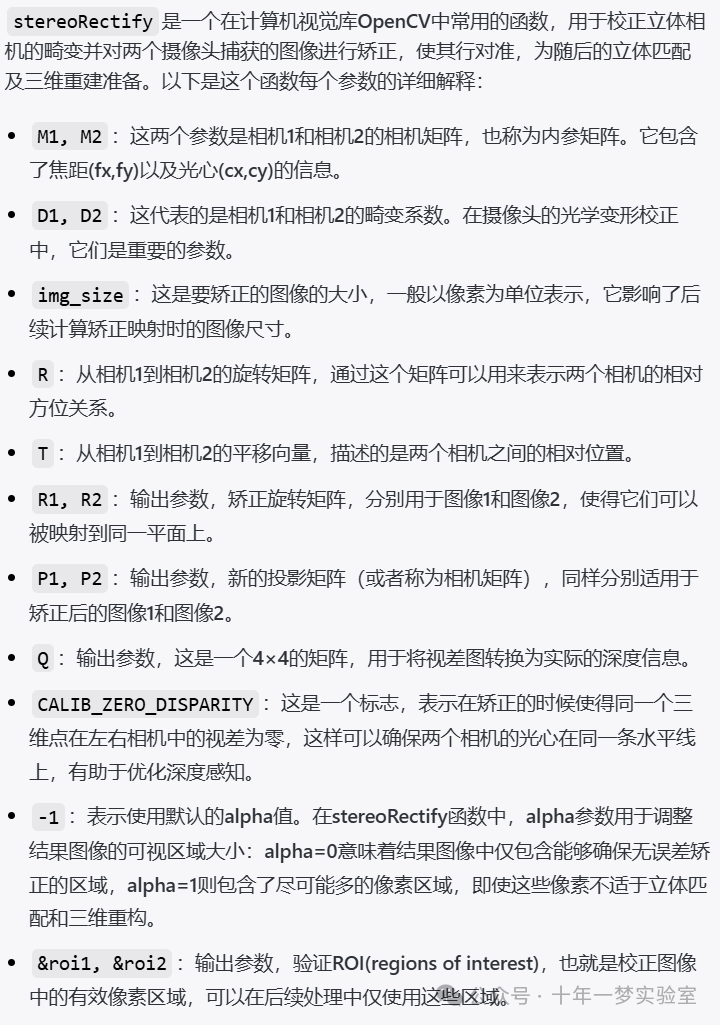
这个函数的主要目的是通过计算两个矫正映射,让来自两个摄像头的图像在水平方向上对准,简化立体匹配的复杂性,提高计算效率和质量。正确定位了坐标对齐后,图像中对应的点就可以直接在同一行上进行匹配,使得视差计算更加准确和便捷。
reprojectImageTo3D(floatDisp, xyz, Q, true);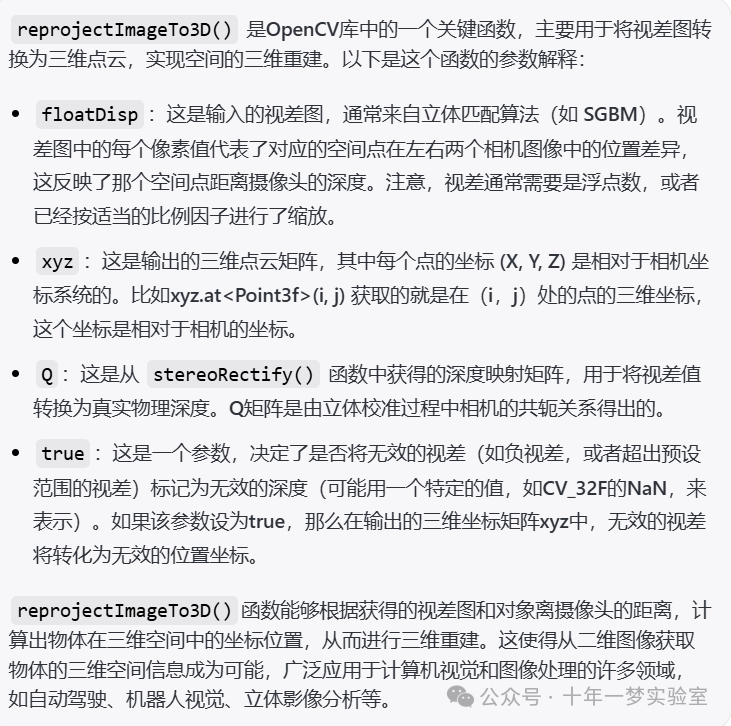
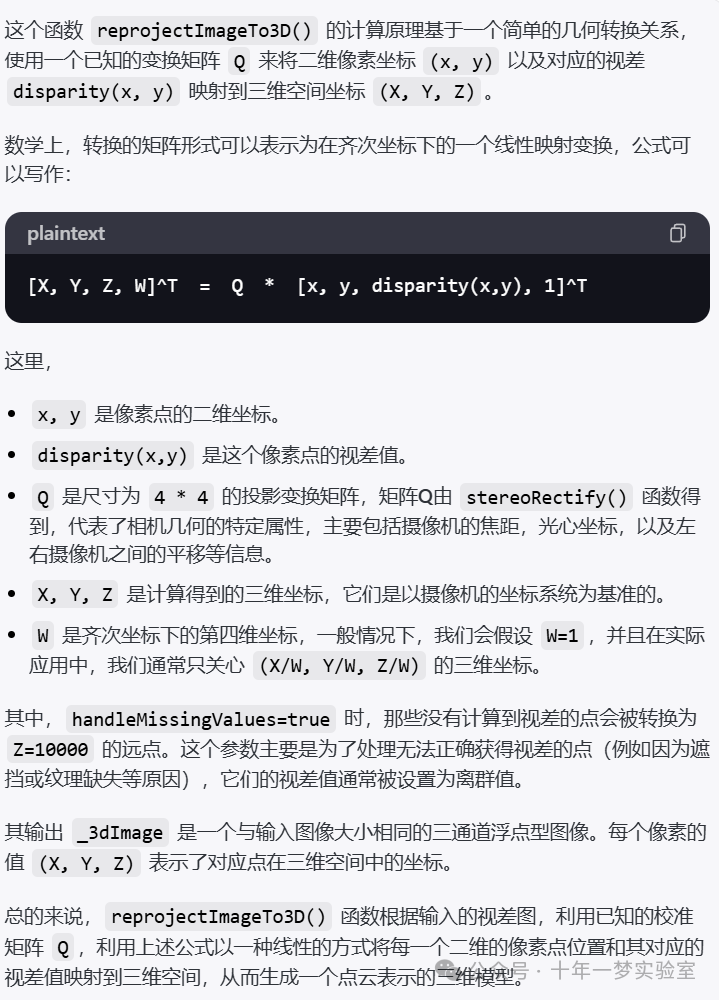
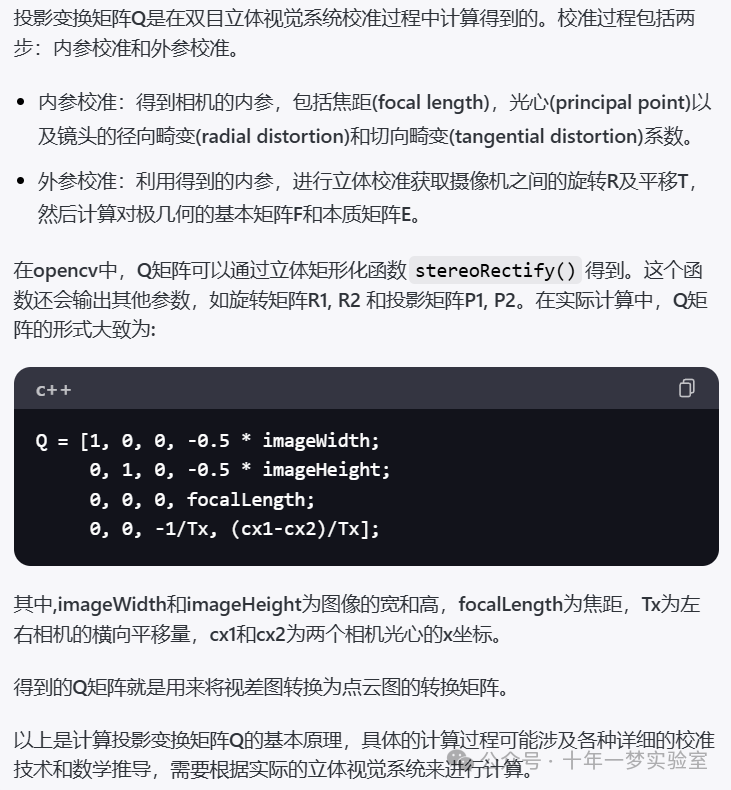
这个函数中的投影变换矩阵Q是如何计算得到的?
The End