文章目录
- 上节内容回顾:
- 本节知识概要
- Why study transformation
- Modeling 模型变换
- Viewing 视图变换
- 2D transformations 二维变换
- Scale
- Uniform 均匀缩放
- Non-Uniform 非均匀缩放
- Reflection Matrix 反射矩阵
- shear 切变
- rotate 旋转,默认绕(0,0)旋转,默认逆时针方向
- rotation matrix 旋转矩阵
- Linear Transformation = Matrix
- Homogeneous coordinates 齐次坐标
- Translation 平移
- Affine Transformation
- Affine map = linear map + translation
- Using homogenous coordinates:
- 使用齐次坐标后的各种变换
- Scale
- Rotation
- Translation
- Inverse Transform 逆变换
- 复杂的变换由简单的变换组合得到
- 将复杂的变换先拆解
上节内容回顾:
- Vectors
- Basic operations: addition, multiplication
- Dot Product
- Forward / backward ( dot product positive / negative )
- Cross Product
- Left / right ( cross product outward / inward )
- Matrics
本节知识概要
- Transformation!
- Today
- Why study transformation
- 2D transformations: rotation, scale, shear
- Homogeneous coordinates
- Composing transforms
- 3D transformations
Why study transformation
Modeling 模型变换
rotation 旋转
scaling 缩放
…
Viewing 视图变换
projection 投影
…
2D transformations 二维变换
- Representing transformation using matrices
- Rotation, scale, shear
Scale
Uniform 均匀缩放

x
′
=
s
x
y
′
=
s
y
x' = s x \\ y' = s y
x′=sxy′=sy
写成矩阵乘法:
[
x
’
y
′
]
=
[
s
0
0
s
]
[
x
y
]
\begin{bmatrix} x’ \\ y' \end{bmatrix} = \begin{bmatrix} s &0 \\ 0 & s \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix}
[x’y′]=[s00s][xy]
Non-Uniform 非均匀缩放

x
′
=
s
x
⋅
x
y
′
=
s
y
⋅
y
x' = s_x \cdot x \\ y' = s_y \cdot y
x′=sx⋅xy′=sy⋅y
写成矩阵乘法:
[
x
’
y
′
]
=
[
s
x
0
0
s
y
]
[
x
y
]
\begin{bmatrix} x’ \\ y' \end{bmatrix} = \begin{bmatrix} s_x &0 \\ 0 & s_y \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix}
[x’y′]=[sx00sy][xy]
Reflection Matrix 反射矩阵
水平反射

x
′
=
−
x
y
′
=
y
x' = -x \\ y' = y
x′=−xy′=y
写成矩阵乘法:
[
x
′
y
′
]
=
[
−
1
0
0
1
]
[
x
y
]
\begin{bmatrix} x' \\ y' \end{bmatrix} = \begin{bmatrix} -1 &0 \\ 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix}
[x′y′]=[−1001][xy]
shear 切变

写成矩阵乘法:
[
x
′
y
′
]
=
[
1
a
0
1
]
[
x
y
]
\begin{bmatrix} x' \\ y' \end{bmatrix} = \begin{bmatrix} 1 &a \\ 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix}
[x′y′]=[10a1][xy]
rotate 旋转,默认绕(0,0)旋转,默认逆时针方向
rotation matrix 旋转矩阵

[ x ′ y ′ ] = [ cos θ − sin θ sin θ cos θ ] [ x y ] \begin{bmatrix} x' \\ y' \end{bmatrix} = \begin{bmatrix} \cos\theta &-\sin\theta \\ \sin\theta& \cos\theta \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix} [x′y′]=[cosθsinθ−sinθcosθ][xy]
Linear Transformation = Matrix
x ′ = a x + b y y ′ = c x + d y x' = ax+by \\ y' = cx+dy x′=ax+byy′=cx+dy
[ x ′ y ′ ] = [ a b c d ] [ x y ] \begin{bmatrix} x' \\ y' \end{bmatrix} = \begin{bmatrix} a &b \\ c & d \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix} [x′y′]=[acbd][xy]
x ′ = M x x' = Mx x′=Mx
Homogeneous coordinates 齐次坐标
Translation 平移
平移变换很特殊
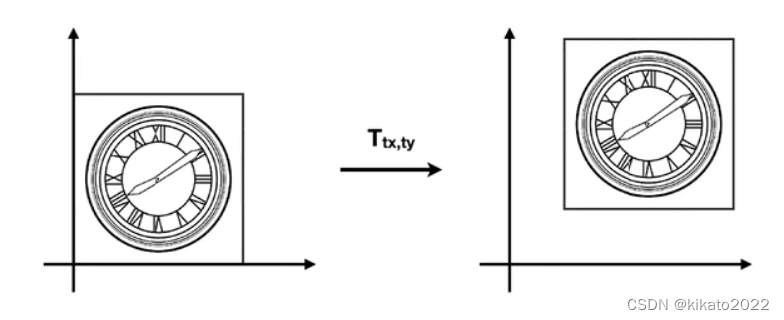
平移变换无法用矩阵乘法表示
[ x ′ y ′ ] = [ a b c d ] [ x y ] + [ t x t y ] \begin{bmatrix} x' \\ y' \end{bmatrix} = \begin{bmatrix} a &b \\ c & d \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix} + \begin{bmatrix} t_x \\ t_y \end{bmatrix} [x′y′]=[acbd][xy]+[txty]
但是我们并不希望平移变换独立开来,我们希望把平移变换也统一到矩阵乘法里面。
解决办法:齐次坐标(Homogenous coordinates)
其次坐标添加第三个坐标
若表示二维的点: 用(x,y,1)
若表示二维的向量:用(x,y,0)
注:因为向量具有平移不变性,所以向量的w坐标是0.
[
x
′
y
′
w
′
]
=
[
1
0
t
x
0
1
t
y
0
0
1
]
[
x
y
1
]
+
[
x
+
t
x
y
+
t
y
1
]
\begin{bmatrix} x' \\ y' \\ w' \end{bmatrix} = \begin{bmatrix} 1 &0 & t_x \\ 0 & 1 & t_y \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} + \begin{bmatrix} x+t_x \\ y+t_y \\ 1 \end{bmatrix}
x′y′w′
=
100010txty1
xy1
+
x+txy+ty1
而且齐次坐标还满足:
向量 + 向量 = 向量
点 - 点 = 向量
点 + 向量 = 点
点 + 点 = ??
要得到问号的答案,需要用到齐次坐标的扩充定义:
[
x
y
w
]
i
s
t
h
e
2
D
p
o
i
n
t
[
x
/
w
y
/
w
1
]
,
w
≠
0
\begin{bmatrix} x\\ y\\ w \end{bmatrix} is\ the\ 2D\ point\ \begin{bmatrix} x/w\\ y/w\\ 1 \end{bmatrix}, w \neq 0
xyw
is the 2D point
x/wy/w1
,w=0
所以 点+点 = 两点中点。
Affine Transformation
Affine map = linear map + translation
[ x ′ y ′ ] = [ a b c d ] ⋅ [ x y ] + [ t x t y ] \begin{bmatrix} x'\\ y' \end{bmatrix}= \begin{bmatrix} a&b\\ c&d \end{bmatrix} \cdot \begin{bmatrix} x\\ y \end{bmatrix}+ \begin{bmatrix} t_x\\ t_y \end{bmatrix} [x′y′]=[acbd]⋅[xy]+[txty]
Using homogenous coordinates:
[ x ′ y ′ 1 ] = [ a b t x c d t y 0 0 1 ] ⋅ [ x y 1 ] \begin{bmatrix} x'\\ y' \\ 1 \end{bmatrix}= \begin{bmatrix} a&b&t_x\\ c&d&t_y\\ 0&0&1 \end{bmatrix} \cdot \begin{bmatrix} x\\ y\\ 1 \end{bmatrix} x′y′1 = ac0bd0txty1 ⋅ xy1
使用齐次坐标后的各种变换
Scale
S ( s x , s y ) = [ s x 0 0 0 s y 0 0 0 1 ] S(s_x,s_y) = \begin{bmatrix} s_x&0&0\\ 0&s_y&0\\ 0&0&1 \end{bmatrix} S(sx,sy)= sx000sy0001
Rotation
R ( α ) = [ cos α − sin α 0 sin α cos α 0 0 0 1 ] R(\alpha)= \begin{bmatrix} \cos\alpha & -\sin\alpha & 0 \\ \sin\alpha & \cos\alpha & 0 \\ 0 & 0 & 1 \end{bmatrix} R(α)= cosαsinα0−sinαcosα0001
Translation
T ( t x , t y ) = [ 1 0 t x 0 1 t y 0 0 1 ] T(t_x, t_y) = \begin{bmatrix} 1&0&t_x\\ 0&1&t_y\\ 0&0&1 \end{bmatrix} T(tx,ty)= 100010txty1
Inverse Transform 逆变换
M
−
1
M^{-1}
M−1
M
−
1
M^{-1}
M−1 is th inverse of transform
M
M
M in both a matrix and geometic sense。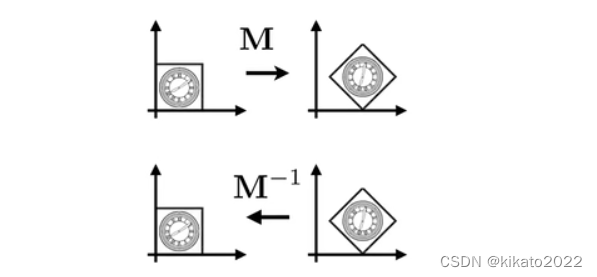
复杂的变换由简单的变换组合得到
注意:变换的顺序很重要
矩阵的乘法不满足交换律,所以先旋转再平移和先平移再旋转得到的结果是不一样的。
注意:连续矩阵相乘,是从右到左逐个应用的。
写完之后,可以把左边的矩阵先全部乘起来,得到的矩阵可以表示这个复杂的变换。

将复杂的变换先拆解
如何以c点为中心进行旋转?
- 先平移到原点
- 绕原点进行旋转
- 再平移回去