文章目录
- 1、前言
- 2、扩展卡尔曼滤波器原理
- 2.1 预测阶段(时间更新阶段)
- 2.2 校正阶段(状态更新阶段)
- 3、永磁同步电机EKF的模型
- 4、永磁同步电机EKF的无位置状态观测仿真
- 4.1 核心模块(在滑膜、龙伯格、磁链等观测器基础上修改)
- 4.2 观测效果
- 参考
写在前面:本人能力、时间、技术有限,没有对一些细节进行深入研究和分析,也难免有不足和错误之处,欢迎交流和指正。本人写博客主要是学习过程的记录。
1、前言
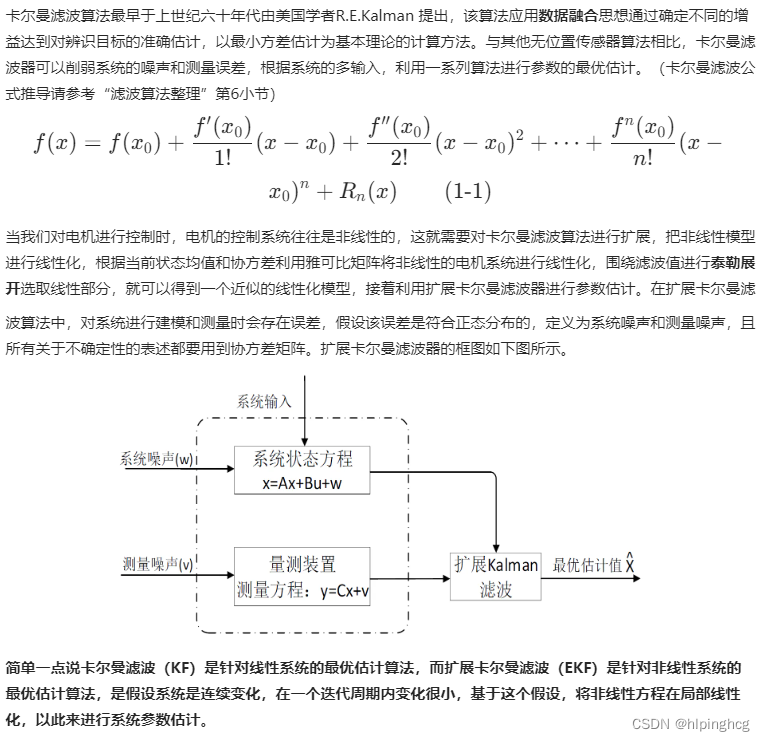
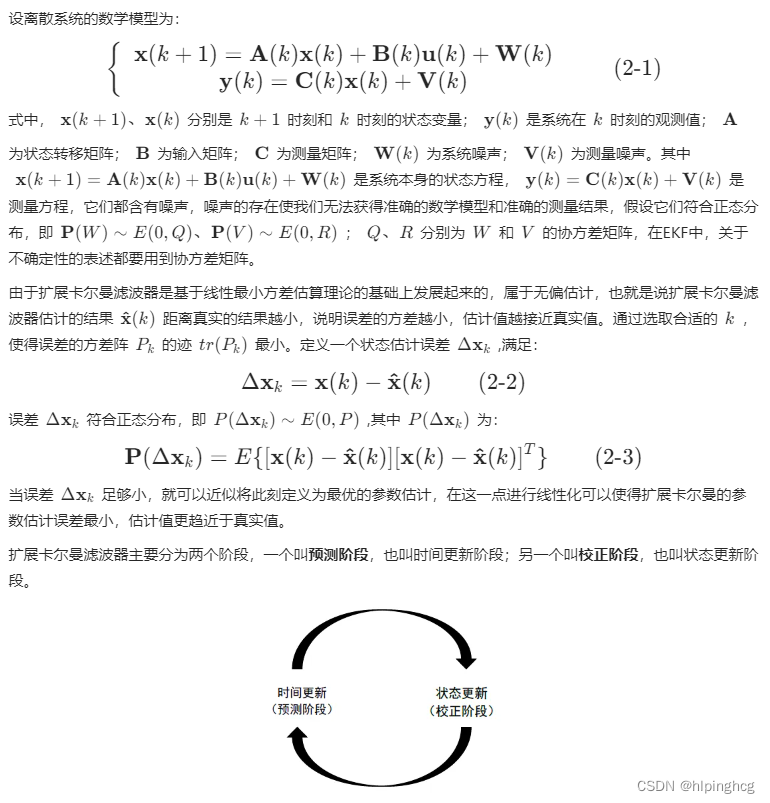
2、扩展卡尔曼滤波器原理
2.1 预测阶段(时间更新阶段)

2.2 校正阶段(状态更新阶段)

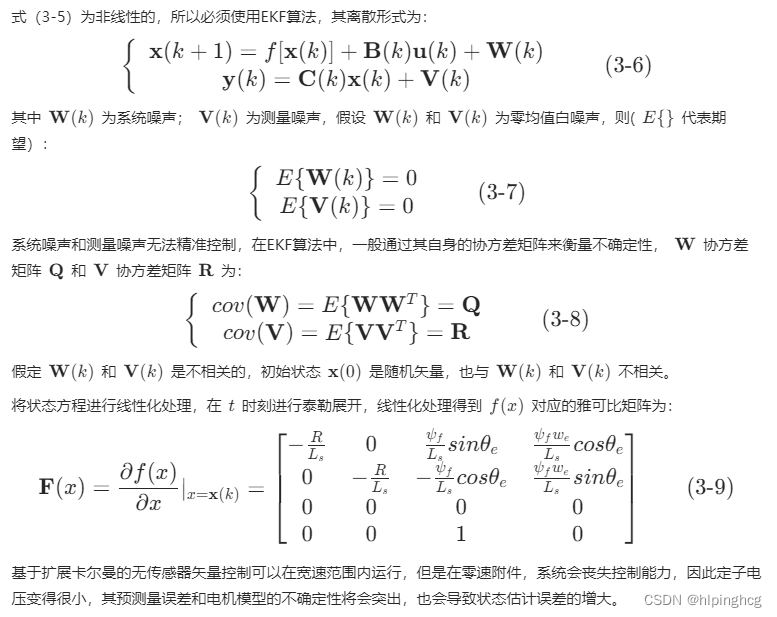
3、永磁同步电机EKF的模型

4、永磁同步电机EKF的无位置状态观测仿真
模型下载地址: 永磁同步电机无感FOC(扩展卡尔曼滤波EKF位置观测控制)simulink仿真模型
PMSM控制框图如下如所示:

4.1 核心模块(在滑膜、龙伯格、磁链等观测器基础上修改)
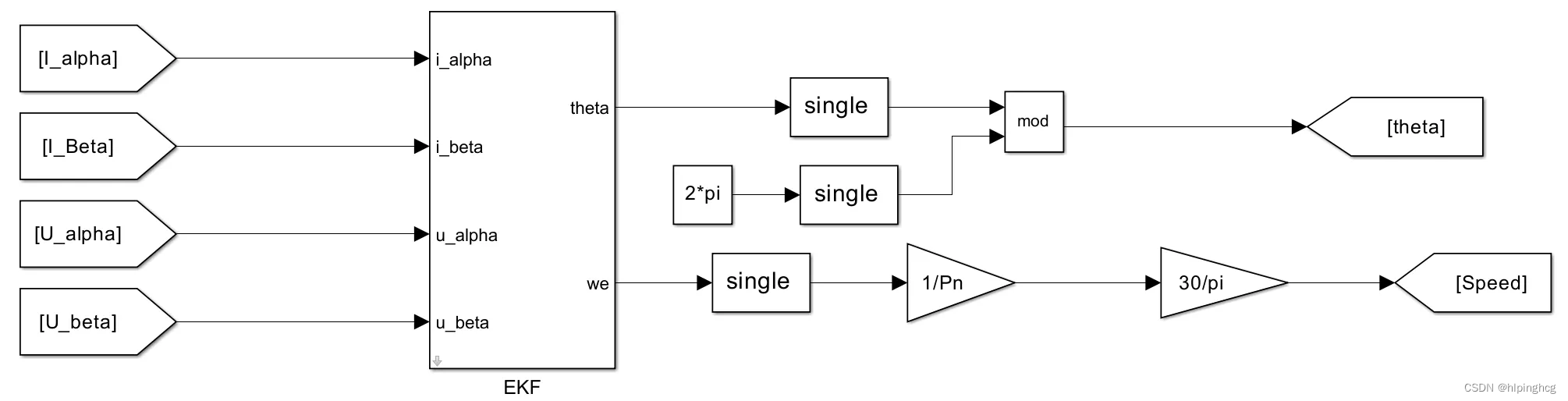
其中EKF模块如下:

其中使用matlab function实现具体算法:
function [theta, we] = EKF(ialpha, ibeta, ualpha, ubeta, Ts, Ls, Rs, flux)
% 声明持久变量
persistent x_k_1 P_K_1
% 如果持久变量为空,则进行初始化
if isempty(x_k_1)
x_k_1 = single([0, 0, 0, 0]');
end
if isempty(P_K_1)
P_K_1 = single(diag([0.1, 0.1, 0, 0]));
end
% 输入向量
Is = single([ialpha ibeta]');
Us = single([ualpha ubeta]');
% 系统噪声和测量噪声协方差矩阵
Q = single(diag([0.1 0.1 1 0.01]));
R = single(diag([0.2 0.2]));
% 系统矩阵和控制矩阵
C = single([1 0 0 0;0 1 0 0]);
B = single([1/Ls 0;0 1/Ls;0 0;0 0]);
% 状态方程和状态转移矩阵
f = single([-Rs*x_k_1(1,1)/Ls + x_k_1(3,1)*flux*sin(x_k_1(4,1))/Ls;
-Rs*x_k_1(2,1)/Ls - x_k_1(3,1)*flux*cos(x_k_1(4,1))/Ls;
0;
x_k_1(3,1)]);
F = single([-Rs/Ls 0 flux*sin(x_k_1(4,1))/Ls flux*x_k_1(3,1)*cos(x_k_1(4,1))/Ls;
0 -Rs/Ls -flux*cos(x_k_1(4,1))/Ls flux*x_k_1(3,1)*sin(x_k_1(4,1))/Ls;
0 0 0 0;
0 0 1 0]);
%v=diag([1,1,1,1])+Ts*F;
% 计算预测值
X_pred = x_k_1 + Ts * (f + B * Us);
Y_Pred = C * X_pred;
Y = Is;
% 计算预测误差协方差
P_Pred = P_K_1 + Ts * (F * P_K_1 + P_K_1 * F') + Q;
%P_Pred=v*P_K_1*v'+Q;
% 计算卡尔曼增益
K = P_Pred * C' * inv(C * P_Pred * C' + R);
% 修正预测值
x_hat = X_pred + K * (Y - Y_Pred);
% 更新误差协方差
P_hat = P_Pred - K * C * P_Pred;
% 输出更新后的状态值
we = single(x_hat(3,1));
theta = single(x_hat(4,1));
% 更新持久变量
x_k_1=x_hat;
P_K_1 = P_hat;
end
4.2 观测效果
- 速度(给定速度、反馈速度及观测速度)

可以看到EKF可以实现正反转的切换。 - 位置(反馈位置及观测位置)

位置重合度较高。
个人觉得扩展卡尔曼是目前几个无感方案中最简单的一种方案,需调节的参数少,控制效果好。不过,如果在MCU中实现,需要计算矩阵。
参考
【1】KF、EKF、ESKF的区别与联系:
https://blog.csdn.net/liu3612162/article/details/114634670
【2】彭程. 无位置传感器的永磁同步电机模型预测控制研究[D].武汉理工大学,2022.DOI:10.27381/d.cnki.gwlgu.2022.000761.
【3】姜畅畅. 基于强跟踪EKF的永磁同步电机无位置传感器控制[D].江苏大学,2023.DOI:10.27170/d.cnki.gjsuu.2023.000998.
【4】李杰. 基于EKF的永磁同步电机无位置传感器控制的研究[D].湖南大学,2014.
【5】现代永磁同步电机控制原理及MATLAB仿真 袁雷
【6】小猫爪:PMSM之FOC控制13-搭建EKF观测器:
https://blog.csdn.net/Oushuwen/article/details/122112664
【7】电控5:扩展卡尔曼的实际应用:
https://zhuanlan.zhihu.com/p/662050208






![[Kubernetes[K8S]集群:master主节点初始化]:通过Calico和Coredns网络插件方式安装](https://img-blog.csdnimg.cn/58e8ee1bf154438eb23c866886ac54d6.png)

![VUE typescript 调用stompjs[Rabbit MQ]](https://img-blog.csdnimg.cn/direct/66dc6a193b3d49cfb701107d2d599608.png)