4D成像雷达赛道的“战火”正在不断升级。
高工智能汽车研究院预计,4D成像雷达将从2023年初开始小规模前装导入,预计到2024年,定点/搭载量有望突破百万颗,到2025年占全部前向毫米波雷达的比重或超过40%。
伴随着中国自动驾驶的渗透率和商业化步伐的加速,作为智能驾驶“第四类”感知,4D成像雷达极大可能成为传感器市场的下一个“爆款”。按照行业人士测算,未来单车搭载4D成像雷达的数量将在5-7颗左右。
于传统毫米波雷达厂商而言,借助在传统毫米波雷达细分赛道积累的量产上车经验,快马加鞭推动其4D成像雷达的定点、量产节点,或是眼下的第一要务。而新入局者也当仁不让,在创新产品、推动量产落地等方面步步紧逼。
例如,2023年1月10日,历经近一年的研发,新入局者“新星”赛恩领动正式发布首款自研车规级高性能成像雷达产品S系列SIR-4K。该产品最远探测距离400米,角分辨率0.5º(水平) x 1º(垂直),具备192个虚拟通道,可输出4096个点云,预计在2024年实现量产。

赛恩领动成像雷达产品S系列SIR-4K
“S系列成像雷达是针对L3及以上智能驾驶典型痛点场景和客户需求打造的高性能成像雷达产品。S代表Sight,代表性能,也代表极致。”赛恩领动CEO李旭阳在发布会上表示。
在他看来,基于创始团队多年深耕成像雷达相关技术的研发与量产,赛恩领动选择在2021年进入智能驾驶赛道并不算晚。
“未来的2-3年是成像雷达发展的黄金时期,也是本土技术型创业建立技术优势的最佳时期。”
助力智能驾驶迈向3.0时代
眼下,智能驾驶正从2.0的导航辅助驾驶时代,迈向3.0的L3级自动驾驶时代。
尽管以行泊一体为代表的导航辅助驾驶,已经实现了量产应用,推动智能驾驶进入了L2+时代。但智能驾驶感知中遇到的长尾问题,仍是智能驾驶进阶3.0时代的绊脚石。
“2.0时代普遍使用视觉+3D毫米波雷达的解决方案,难以满足3.0时代的感知要求,长尾问题并没有解决,迫切需要新一代的低成本、高性能传感器助力,而4D毫米波雷达同时具备这两个特点,因而是非常适合3.0时代的感知产品。”

传统3D毫米波雷达与4D成像雷达性能对比
李旭阳表示,相比传统的3D毫米波雷达,赛恩领动的成像雷达SIR-4K不仅提供更为精准的测高能力,同时在成像能力上,可以为感知算法提供干净且有效的点云输出,对于目标形态有更好的3D还原,同时增加对于目标的多普勒速度感知,实现4D级别的扩展目标追踪。
据介绍,SIR-4K的工作频段使用76-79GHz,定位于满足L3-L5智能驾驶和无人驾驶对于感知的性能要求。相比同类产品,其最远探测距离可达400米,对于动态目标可实现持续稳定的追踪。
而通过对192个通道的有效利用,在不大幅增加硬件算力的基础上,SIR-4K可实现对于256个动态目标的输出,4096个点云的输出,为智能驾驶和无人驾驶提供丰富的环境感知信息。
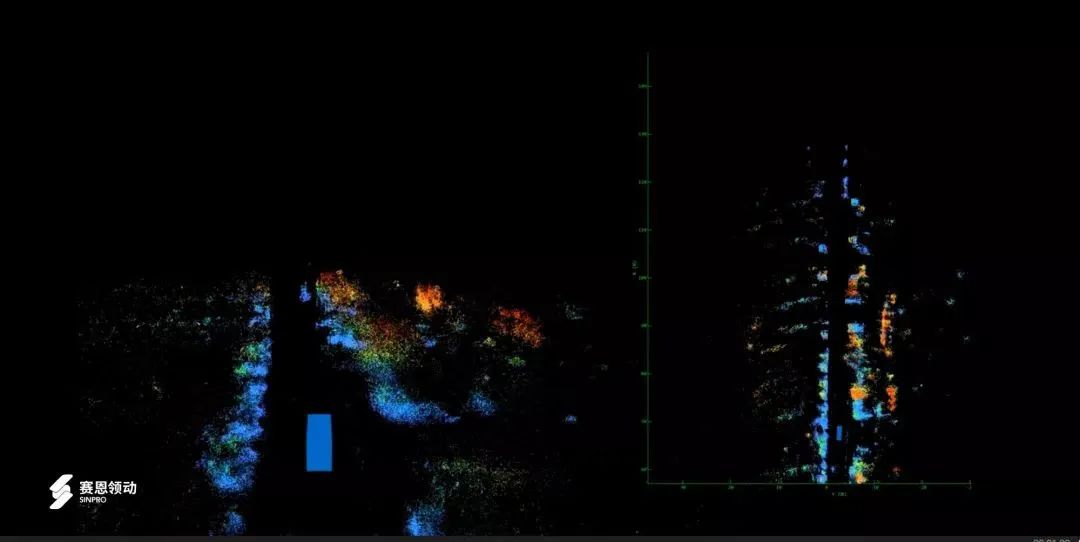
赛恩领动SIR-4K点云成像效果
在感知性能方面,SIR-4K在水平方向可以达到0.5º的角度分辨率,通过领先的测角算法加持,更好地区分复杂道路环境中的动态和静态目标,从而实现对动态和静态目标的三维重建和精准感知。
在多目标水平测角方面,SIR-4K可实现40dB的旁瓣抑制水平,在如大小车同速同距等易产生鬼影目标的场景下实现更为精准的性能表现。
在俯仰方向方面,SIR-4K可提供达1º的角度分辨率,实现更为精准的测高,从而为解决长尾问题中的静止目标精准避障提供更为准确的信息,通过后续算法处理,可输出如自由空间等信息用于感知融合系统。
据李旭阳透露,随着角度分辨率的大幅提升,SIR-4K面向智能驾驶中的典型痛点场景,特别是行人鬼探头等“看不见”的问题上,赛恩领动技术团队通过对雷达电波特性的多年经验积累,实现了SIR-4K对于隐藏目标的预先感知。
而通过测角算法方面的创新,SIR-4K的测角能力得到了大幅提高,特别是在高速场景下对于路面上的静止行人在远距离也可清晰分辨,解决了“看不清”的问题。
在远距离感知上的优势,特别是在天气环境不佳的场景,如高速团雾下,赛恩领动的产品无疑为驾驶员提供了更为可靠的行车保障,解决了“看不远”的问题。
“随着智能驾驶3.0时代的到来,未来成像雷达将在智能感知系统中发挥不可替代的作用,成为智能驾驶感知系统高性价比的选择。”
可见,有关成像雷达在智能驾驶领域的应用潜能,李旭阳信心十足。
开启智能驾驶“第四类”感知的底气
在他看来,成像雷达背后的挑战,亦是赛恩领动的机会。
“开发一颗满足性能指标要求而且价格合理的成像雷达,需要从系统与波形设计、射频技术到算法开发,从技术方案到软硬件工程落地,解决尺寸与天线孔径的矛盾等问题。”
作为一家新入局者,赛恩领动致力于研发适用于L3及以上的高性能车规级环境感知解决方案,包括4D成像雷达智能硬件、传感器算法及软件,以及基于人工智能的感知产品,为客户提供自动驾驶系统感知、多传感器融合及系统功能的解决方案并推动量产落地。
直面成像雷达的行业挑战,李旭阳对团队的能力和潜力亦充满自信。
一方面,通过团队的合力攻坚,赛恩领动仅用近1年的时间,就打造出了自研的车规级高性能成像雷达产品S系列SIR-4K,可以看出其团队背后的强大实力。
另一方面,其拥有的的成像雷达波形设计、自研算法、AI与传统的雷达算法能力相结合等技术护城河,亦是赛恩领动开拓成像雷达细分赛道的底气。
例如,在成像雷达波形设计方面,赛恩领动的核心创始团队理解并掌握着雷达设计的核心技术。通过近一年来对成像雷达技术的不断钻研与快速突破,奠定了其成像雷达工程化和产品化的基础,亦推动这家企业“打造智能驾驶‘第四类’感知”的想法与积累变成了现实。
其中,赛恩领动所特有的空间与多普勒联合变换技术,即解决了传统TDMA技术在多通道下发射时间不足的问题,同时也克服了DDMA技术在解速度模糊和相位补偿上带来的研发难点。
另外,赛恩领动的核心团队里,除了有在德国大厂雷达算法领域摸爬滚打过十几年的技术专家外,本地团队多年来对于雷达目标跟踪算法在量产项目中的经验积累,也成为了赛恩领动的核心能力。
“实现射频技术的突破,仅完成了成像雷达量产研发万里长征中的第一步,而真正把目标反射回来的电磁波处理成点云,再形成稳定可靠的目标追踪,还需要将数字信息处理DSP 技术及雷达感知算法掌握在自己手里。”
值得一提的是,赛恩领动的算法团队有着多年的雷达数据处理经验。基于对成像雷达数据结构与电磁波的传播特性的深入了解,以嵌入式开发为目标,再有针对性地对雷达数据特征进行提取,优化AI深度学习网络模型,最终实现了AI的能力与传统的雷达算法能力相结合。
可以预见,为了抢时间打造技术壁垒、抢占量产时间,新老玩家势必将铆足劲,2023年成像雷达这条细分赛道值得期待。