一、安装并使用可视化工具RSView,官网提供了不同版本的安装包,根据个人环境下载解压。
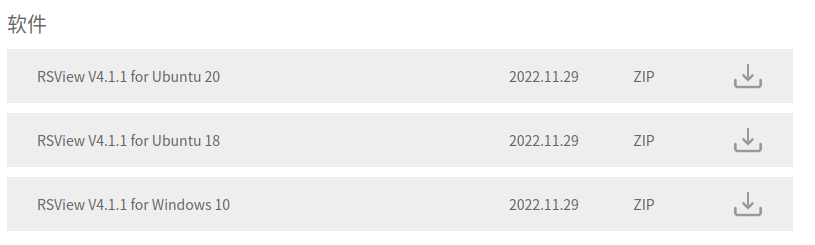
本人ubuntu18系统,修改权限:chmod a+x run_rsview.sh;然后运行:./run_rsview.sh。该软件每次启动时都要运行./run_rsviewer.sh


该软件另外的一个重要功能就是,根据需求修改协议(官网提供)UCWP,修改配置参数。例如:
1.多个雷达近距离放置工作的时候,激光会相互干扰,需要设置相位锁定功能,减少相互干扰。即:传感器分别旋转到特定角度然后发射激光。(本小白目前感觉这个可能会用到)
2.回波模式也可以修改,默认是最强回波,共三种模式:双回波、最强回波、最后回波
二、测试录制与回放Packet rosbag
git 1.5参数介绍(上一篇提到没有找到配置文件求助技术指导,本篇在参数介绍这块找到了,1.4介绍编译,1.5提到配置文件,怪本人阅读文档不够细致)
https://github.com/RoboSense-LiDAR/rslidar_sdk/blob/main/doc/howto/11_how_to_record_replay_packet_rosbag_CN.md
参考教程,设置config文件,然后ROS录制bag包。
$ rosbag record /rslidar_packets -O bag
[ INFO] [1673509009.393032670]: Subscribing to /rslidar_packets
[ INFO] [1673509009.397179984]: Recording to 'bag.bag'.
Ctrl+c结束录制,文件夹下可以看到一个bag.bag
按照教程,回放bag包,有bug
[rslidar_sdk_node-1] process has died [pid 28589, exit code -6, cmd /home/pilot/robosense_ws/devel/lib/rslidar_sdk/rslidar_sdk_node __name:=rslidar_sdk_node __log:=/home/pilot/.ros/log/c2e8e9ca-9250-11ed-85b2-9cb6d0faa551/rslidar_sdk_node-1.log].
log file: /home/pilot/.ros/log/c2e8e9ca-9250-11ed-85b2-9cb6d0faa551/rslidar_sdk_node-1*.log
config设置的时候false拼写错误了
send_packet_ros: false
此时rviz没有点云文件,执行命令播放bag包,然后可以回放刚才的录制过程。
rosbag play bag.bag

使用ros可以录制点云rosbag消息并回放,但是点云包过大,rslidar_sdk提供了该方法。
三、解码PCAP文件
https://github.com/RoboSense-LiDAR/rslidar_sdk/blob/main/doc/howto/08_how_to_decode_pcap_file_CN.md
按照git设置config配置文件,pcap_path要设置为文件的全路径,根据自己的存放位置修改。
操作的时候发现本人没有此文件,记得用户指导手册有介绍使用RSView中的Record按钮停止保存pcap数据,与技术指导沟通了解到,新版不支持保存pcap文件,ubuntu下建议用wireshark抓包保存pcap文件,该方法方便且保存的是雷达原始数据,解析后就是点云数据,原始数据占用空间小很多。
(用户手册中的截图)

(本人的RSView截图)

下一篇尝试使用wireshark抓包,然后解析吧~下班嘿嘿~