问题:
当使用Astra相机的启动的指令启动相机后,使用rviz查看相机所发布的rgb数据时,在终端会出现如下的提示信息:
Camera calibration file /home/car/.ros/camera_info/rgb_Astra_Orbbec.yaml not found.
Camera calibration file /home/car/.ros/camera_info/depth_Astra_Orbbec.yaml not found.
可以看到提示的信息为相机的标定文件未能在 /home/car/.ros/camera_info/下找到,当我自己根据提示的路径去查找时,发现在/home/car/.ros/路径文件下,并没有camera_info这个文件夹,因此网上查询发现是因为自己没有对相机进行标定的缘故而导致。
下面就根据下面的步骤开始解决这个相机标定问题:
1、准备阶段
1)打印棋盘格,可在下面的这个网站链接中打印自己想要的尺寸的棋盘格,我设置的行列为7x10,大小为18mm的棋盘格
棋盘格网页链接:Camera Calibration Pattern Generator – calib.io
2)在Ubuntu18.04系统中安装标定功能包
sudo apt-get install ros-melodic-camera-calibration2.1、标定彩色相机
1)启动相机节点
roslaunch astra_camera astra.launch2)打开相机标定节点并指定话题(astra相机发布的彩色节点为:/camera/rgb/image_raw,可以使用 rostopic list 进行查看相机发布的节点名称)
rosrun camera_calibration cameracalibrator.py --size 6x9 --square 0.018 image:=/camera/rgb/image_raw其中的指令参考如下进行修改:
(1) size指的是:棋盘格内部的角点的行列数;
(注意:不是棋盘格的行列数,如我指定的行列为 7x10 ,则指令中的size就应就改为 6x9 ,因为这个对应的是棋盘格内部的角点的行列数。)
(2) square 是棋盘格每个格子的边长(可以自己用尺子量一下),我这里的是18mm,对应指令应输入0.018,因为指令的单位为米(m);
(3) image是图像话题名称,当Astra深度相机通常为/camera/rgb/image_raw,其他的相机可以通过 rostopic list 指令查看发布的相机节点名称。
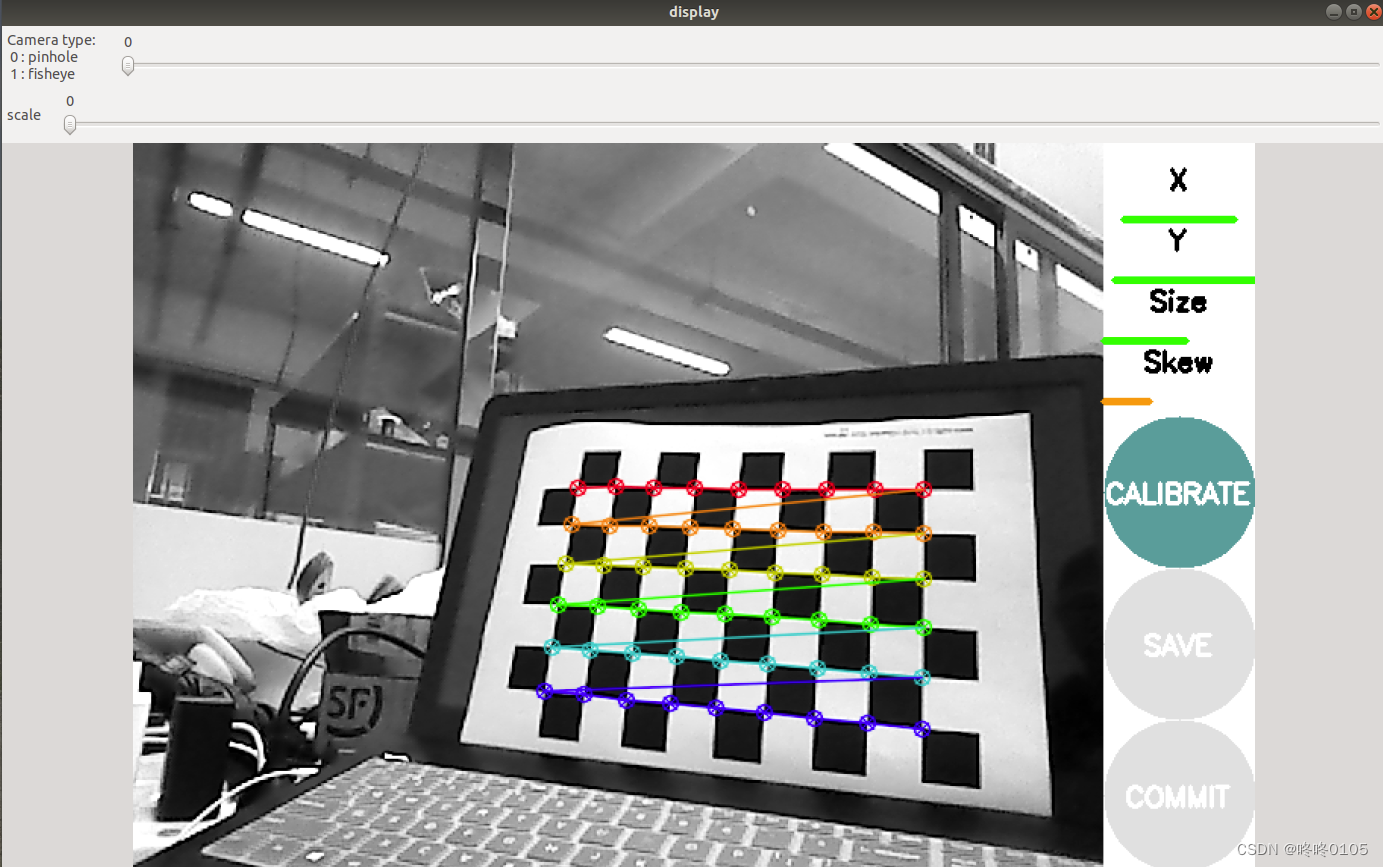
3)在弹出的窗口相机视野中手持标定板,不断分别进行左右(X),上下(Y),远近(Size),倾斜(Skew)运动,尽量让这四个维度的进度条都为绿色。此过程要保证标定板上有彩色的条纹才为有效。这个过程中控制台也会打印出标定个数的日志。此过程也可以将标定板固定,然后移动相机。
(1)X:标定靶在摄像头视野中的左右移动;
(2)Y:标定靶在摄像头视野中的上下移动;
(3)Size:标定靶在摄像头视野中的前后移动;
(4)Skew:标定靶在摄像头视野中的倾斜转动

4)当右侧的CALIBRATE圆形按钮由灰色转为绿色时,说明数据采集完毕,此时点击CALIBRATE按钮,便开始读取之前保存的图片并执行标定计算,这里需要等待一会,因为计算需要时间。
5)有标定结果出来后,点击标定界面的SAVE按钮,再点commit按钮,标定结果保存在/tmp/calibrationdata.tar.gz这个压缩包中,到这里彩色相机的标定就结束了,关闭标定程序。

在终端中也会输出相应的标定结果。

6)保存后的标定文件为 /tmp/calibrationdata.tar.gz 的压缩包,将之解压,其中的 ost.yaml就是我们想要的标定结果。
打开ost.yaml,如下:
image_width: 640
image_height: 480
camera_name: narrow_stereo #相机名称
camera_matrix: #相机内参矩阵(相机坐标系->像素坐标系)
rows: 3
cols: 3
data: [ 556.03872, 0. , 335.509 ,
0. , 556.50706, 233.42121,
0. , 0. , 1. ]
distortion_model: plumb_bob
distortion_coefficients: #相机畸变系数
rows: 1
cols: 5
data: [0.057411, -0.256237, 0.007304, 0.014521, 0.000000]
rectification_matrix: #矫正矩阵
rows: 3
cols: 3
data: [ 1., 0., 0.,
0., 1., 0.,
0., 0., 1.]
projection_matrix: #投影矩阵(世界坐标系->图像坐标系)
rows: 3
cols: 4
data: [ 547.36389, 0. , 345.97145, 0. ,
0. , 559.91687, 235.82042, 0. ,
0. , 0. , 1. , 0. ]
【参数说明】
camera_matrix:相机内参矩阵 (固有参数)
distortion_coefficients:相机畸变系数 (固有参数)
rectification_matrix:矫正矩阵(一般为单位阵 )
projection_matrix:投影矩阵(世界坐标系到图像坐标系)
7)然后将得到的标定文件 ost.yaml 进行名称的修改,此时的更改是根据刚刚报错的终端提文件名进行修改即可,刚刚终端提示的第一条是
Camera calibration file /home/car/.ros/camera_info/rgb_Astra_Orbbec.yaml not found.
然后我们将刚刚彩色相机得到的标定文件 ost.yaml 的名称修改为 rgb_Astra_Orbbec.yaml ,并且还需要将该 yaml 文件中的 camera_name 也修改为 rgb_Astra_Orbbec ,不然后续运行的过程中会出现如下的提示:
[rgb_Astra_Orbbec] does not match name narrow_stereo in file /home/car/.ros/camera_info/rgb_Astra_Orbbec.yaml
因为标定文件中默认的名称为 narrow_stereo ,而我们已经将彩色相机的标定文件修改为了 ost.yaml 的名称修改为 rgb_Astra_Orbbec.yaml ,因此为了保证不出现错误提示,还需要将 yaml 中的 camera_name 也修改为 rgb_Astra_Orbbec 便可解决此问题。

8)将刚刚修改的 rgb_Astra_Orbbec.yaml 移动到 /home/car/.ros文件下的/camera_info/文件夹中,由于我的 /home/car/.ros文件下没有/camera_info/文件夹,因此需要创建并移入
cd /tmp/calibrationdata/
mkdir -p ~/.ros/camera_info
mv rgb_Astra_Orbbec.yaml ~/.ros/camera_info/ 到此处对于 Astra 相机的彩色部分标定完成。接下来对深度相机(红外相机)部分进行标定操作
2.2、标定红外相机
1)标定ir红外相机与标定rgb彩色相机相比,除了第一步的image参数不同,其他都一样。
由于其深度数据的成像即为红外相机的投影光斑分析得到的,ir红外的相机标定结果即是深度相机的标定结果。
运行红外相机标定节点:
# 启动相机
roslaunch astra_camera astra.launch
# 运行红外标定
rosrun camera_calibration cameracalibrator.py --size 6x9 --square 0.018 image:=/camera/ir/image目前测试,在Ubuntu18.04下melodic预览图像内容是黑色的,如下图。但是在rviz下却可以正常查看。

原因是由于默认的IR图像数据是16-bit的,如果想清晰的显示出来,我们需要将之归一化成一个数值范围为0-255范围的8-bit图片。而rviz已经帮我们做了这样的归一化操作。
根据这个思想,我们实现一个图像类型转换节点,即订阅 /camera/ir/image 话题,将得到的16-bit的图片转换成8-bit,然后输出到 /camera/ir/image_mono8,想要输出为 /camera/ir/image_mono8的节点需要使用如下的转换文件才可以,网盘下载链接如下:
image_transformer.zip官方版下载丨最新版下载丨绿色版下载丨APP下载-123云盘
将此文件保存到catkin_ws/src文件下,然后使用 catkin_make 指令对刚刚的 image_transformer进行编译操作,编译完成后再次执行如下操作即可实现对红外相机的标定工作。
也可以通过如下指令进行克隆指令
cd catkin_ws/src
git clone https://gitee.com/tangyang/image_transformer注意,一定得按照我下面的启动顺序依次启动运行指令,不然会出错
# 1)启动相机
roslaunch astra_camera astra.launch
# 2)启动image_transformer转换节点
cd catkin_ws
source ./devel/setup.bash
rosrun image_transformer gray_image_transformer
# 3)运行红外标定
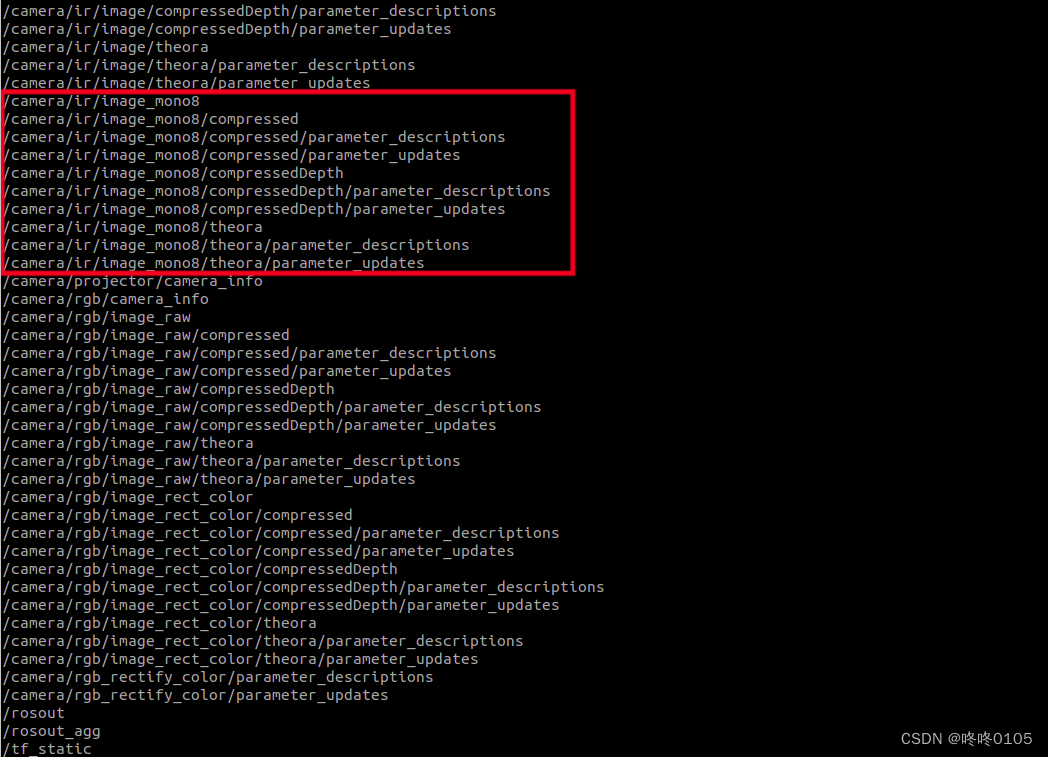
rosrun camera_calibration cameracalibrator.py --size 6x9 --square 0.018 image:= /camera/ir/image_mono8运行完 rosrun image_transformer gray_image_transformer 指令后,使用 rostopic list 指令便可以查询到转换后的8-bit节点,如下图所示:
运行红外标定指令后的图像如下:
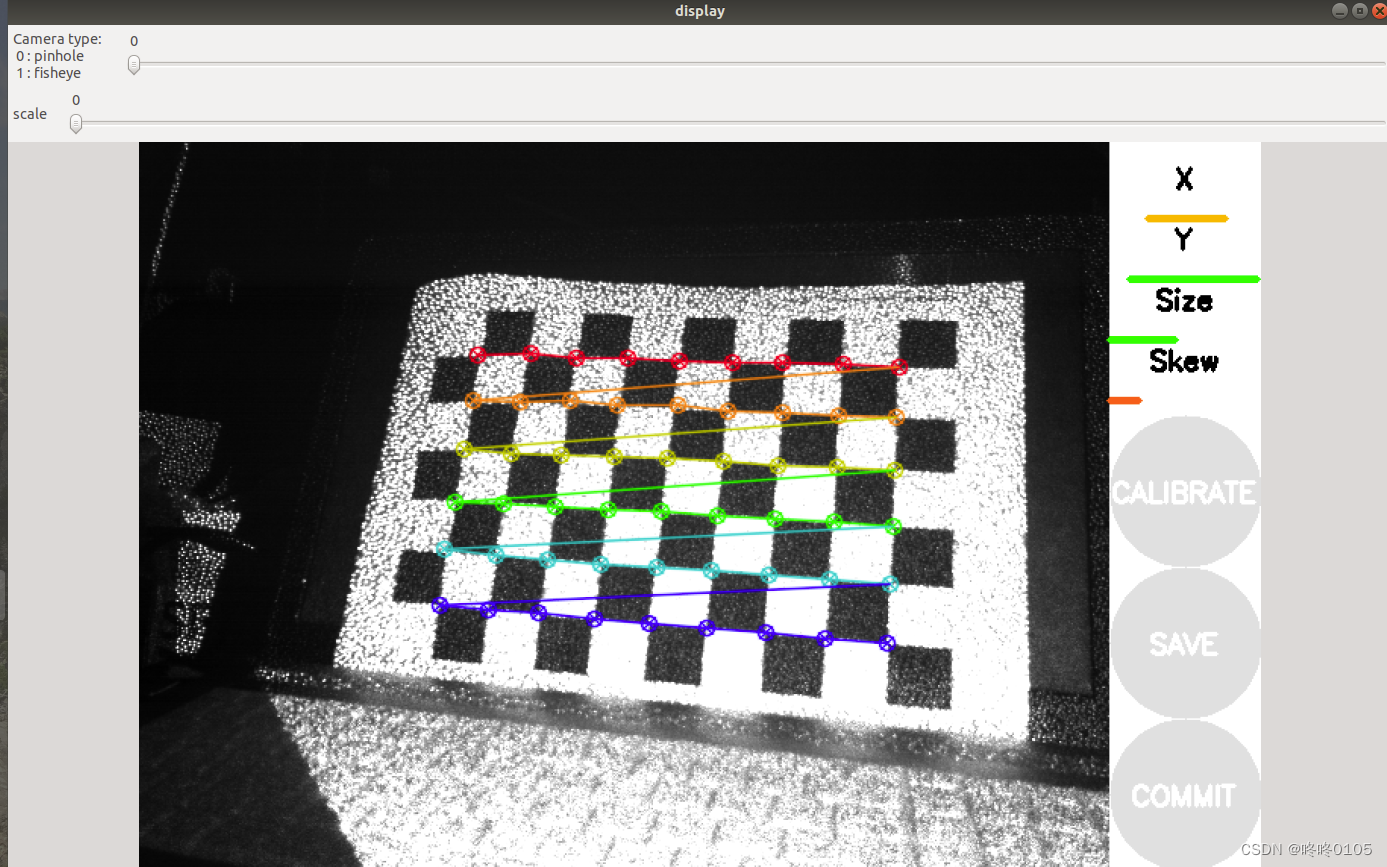
然后便可以在标定程序中查看到如彩色相机标定的类似画面,其中标定的步骤和彩色相机部分一致,并且此处需注意,标定红外相机标定文件保存路径也是在/tmp/下,并且名称也是calibrationdata.tar.gz 的文件,需提前将前面的彩色相机的 calibrationdata.gz 的文件保存到其他地方,不然在红外相机标定文件保存时会将其覆盖。
此外,这里所得到的红外相机的标定文件打开也是和彩色相机相同的命名方式,将 ost.yaml 的名称修改为 depth_Astra_Orbbec.yaml ,将 yaml 中的 camera_name 也修改为 depth_Astra_Orbbec,然后保存修改文件,并使用如下指令将 depth_Astra_Orbbec.yaml 移动到 /home/car/.ros/camera_info/ 路径下
cd /tmp/calibrationdata/
mv depth_Astra_Orbbec.yaml ~/.ros/camera_info/ 至此,Astra 深度相机的整体标定已完成。
参考博客
奥比中光Astra相机(一)驱动安装及ROS标定 - 哔哩哔哩
使用标定文件出错:does not match name narrow_stereo in file /home/michael/.ros/camera_info/head_camera.yaml._[head_camera] does not match name narrow_stereo in-CSDN博客
Astra plus 深度相机校准标定-CSDN博客