人类正在迈入智能时代,其中一个显著特征是大量智能体的涌现。无论生物人、数字人和机器人,都是智能体的不同具身形式。为实现多种智能体在跨虚实空间的共存协作,探索人机共生的新范式,北京通用人工智能研究院(简称通研院)在IEEE VR 2024上发表了题为《On the Emergence of Symmetrical Reality》的论文,并作口头报告。
文章创新性地提出了全球首个对称现实框架,用于描述各种物理-虚拟融合形式下的人机共生形态。该框架系统地分析了物理-虚拟融合的不同技术范式,深入阐述了人工智能体(特别是未来具备类人感知认知能力、能够自主决策的通用智能体)融入人类社会的各种挑战,并开发了一个原型系统以探索对称现实框架在特定任务中的具体实践路径。
该工作的论文链接、项目主页如下:
论文链接: https://arxiv.org/pdf/2401.15132.pdf
项目主页: https://sites.google.com/view/ieeevr2024sr
公众号原文链接:
学术前沿|通研院提出首个“对称现实”框架,探索智能时代人机共生新范式
01 导 言
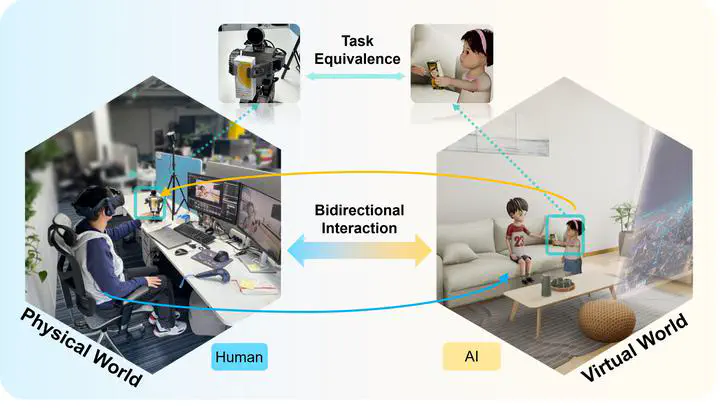
对称现实是描述人与智能体在跨虚实空间共生协作的一种理论框架,解释了AI技术高速发展所带来的新型的人机共存关系。在这个框架内,人工智能(AI)被视为原生于数字虚拟空间(或称虚拟世界)内的一种数字生命,人工智能驱动的智能体(AI Agents)则可以同时在物理世界和虚拟世界拥有各种具身形态,可具备自主的感知、认知、决策、学习、执行和社会协作能力。因此,这种智能体在感知交互结构方面,能够与人的感知交互过程相类比。这就使得智能体在存在形式、交互形态上,可以拥有与人类等同的逻辑结构。也就是说,物理世界的人类和虚拟世界的智能体,都可以在物理、虚拟世界中同时执行任务,在一定程度上形成了对称。我们将这种人机对称式存在及交互系统所呈现的现象称为对称现实(Symmetrical Reality)。
02 基本架构
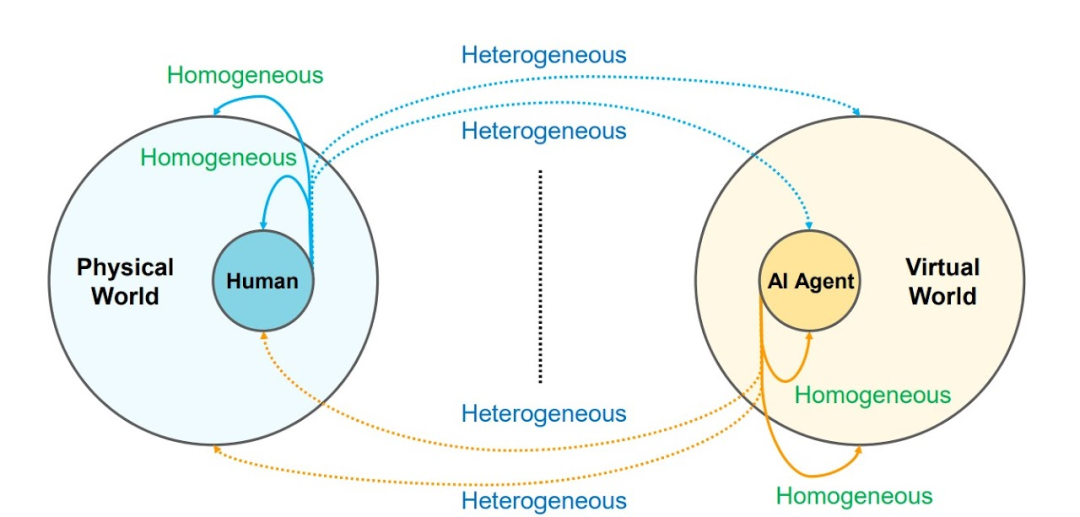
图1 对称现实系统拓扑结构示意图
对称现实系统中,人和智能体分属于不同的空间,但是均可在虚、实空间内活动。物理世界和虚拟世界可以看作是不同的存在形式。人类和其所生活的物理世界属于同质的(Homogeneous),但是人类和虚拟世界属于异质的(Heterogeneous) 。同理,智能体的智能一般形成于数字虚拟空间,因此智能体和虚拟世界属于同质的,但是和物理世界却属于异质的。这种本质的不同,也导致了人类和智能体(尤其是具有较高智能水平的自主智能体)在共存协作中具有迥异的表现。
03 人类兼容的AI
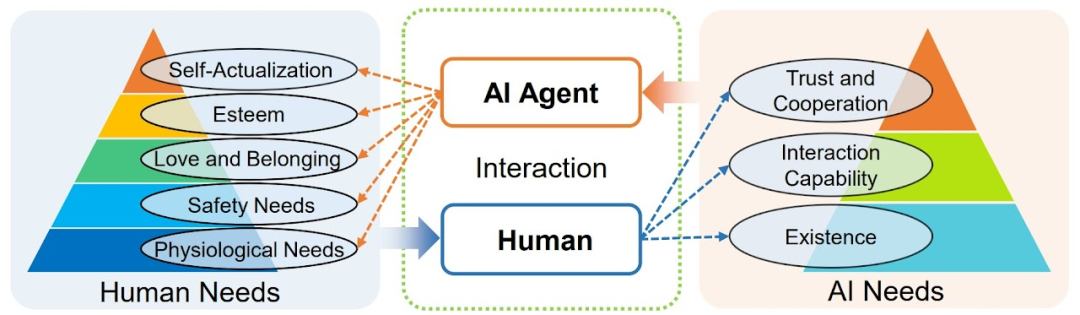
图2 对称现实框架中的人和智能体需求示意图
谈到人机共存,一般我们会想到从需求理论出发去探讨人机之间的关系。这里我们不妨采用马斯洛的需求层次理论来描述人类需求体系,当然这并不是唯一的方式。与之对应,我们同样可以设计一个多层次的AI需求层次体系来建模智能体在人机交互中的表现。假设智能体首要的需求是能够生存下来,这支持了它可以继续做各种任务;其次是它需要有能力跟外界进行信息交互,或者执行某些动作来改变外部环境;最后,为了与人协作,它需要得到人类的信任,提升协作的表现。据此设计的AI需求层次,参考了马斯洛的分层设计方式,具备一定的典型性。当然在某些情况下,智能体可能并不需要具备需求层次,仅仅完成被编程好的任务即可。但是如果需要将其设计成自主驱动的智能体,那么设计人员便可以按照类似方法,将智能体设计成人类兼容(Human Compatible)的形式,更好地服务人类社会,这种自顶向下的设计方式也可在人机价值对齐中起到重要作用。
04 实例场景
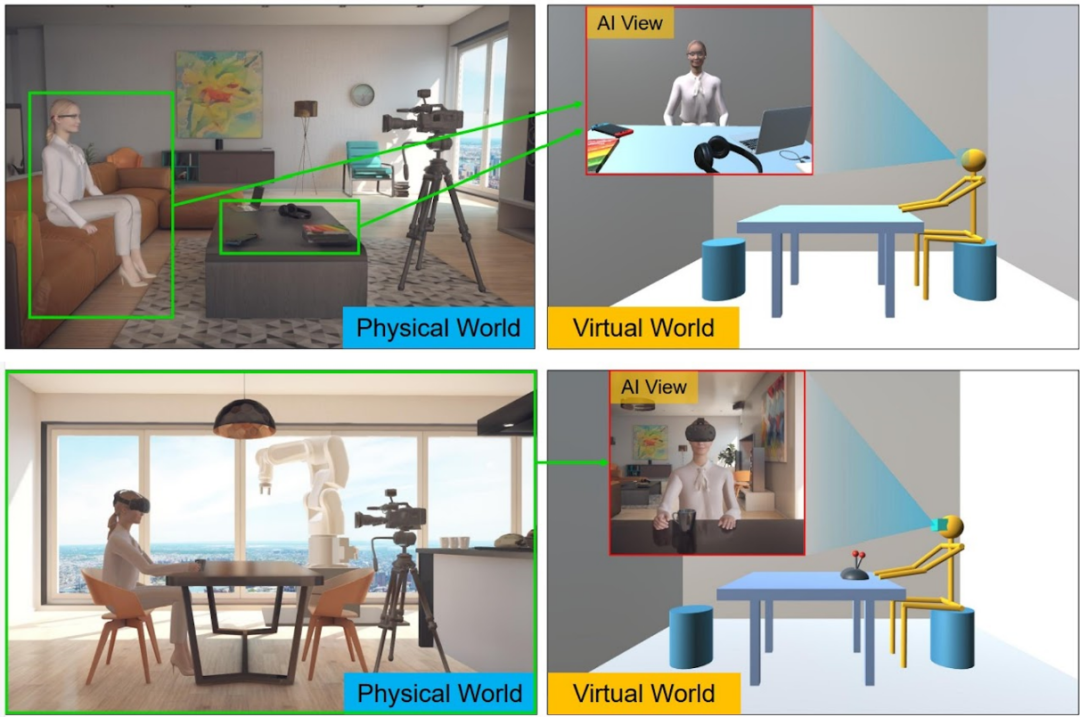
图3 逆向增强现实和逆向虚拟现实
传统的虚拟现实、增强现实都是以人为中心的研究范式,研究目标是为人类构造虚拟的或虚实融合的数字呈现。但是区别于人类的是,智能体本身就是源自于虚拟空间的,那么它对物理、虚拟空间的感知过程会和人类一样吗?这可能需要分类来看。如果仅看其在对称现实系统中的定位,那么它和人类一样,都可以在虚拟和物理空间交互,其感知过程和人类确实可以看成是类似的结构,这也是对称现实的本质特征之一,即双感知主体。但是正如前文提到的,物理世界和虚拟世界是异质的形式,所以对于智能体来说,物理世界反而是一种“remote”的东西,虚拟世界才是“local”的东西。这就决定了,如果用物理世界的元素来增强智能体的体验的话,是一种以智能体为感知中心的增强现实(Augmented Reality)形式,可以称之为逆向增强现实(Inverse Augmented Reality)。同理,以智能体为感知中心的虚拟现实,可以成为逆向虚拟现实。这些都作为对称现实体系的一些具体形式,支撑了对称现实的基本架构。
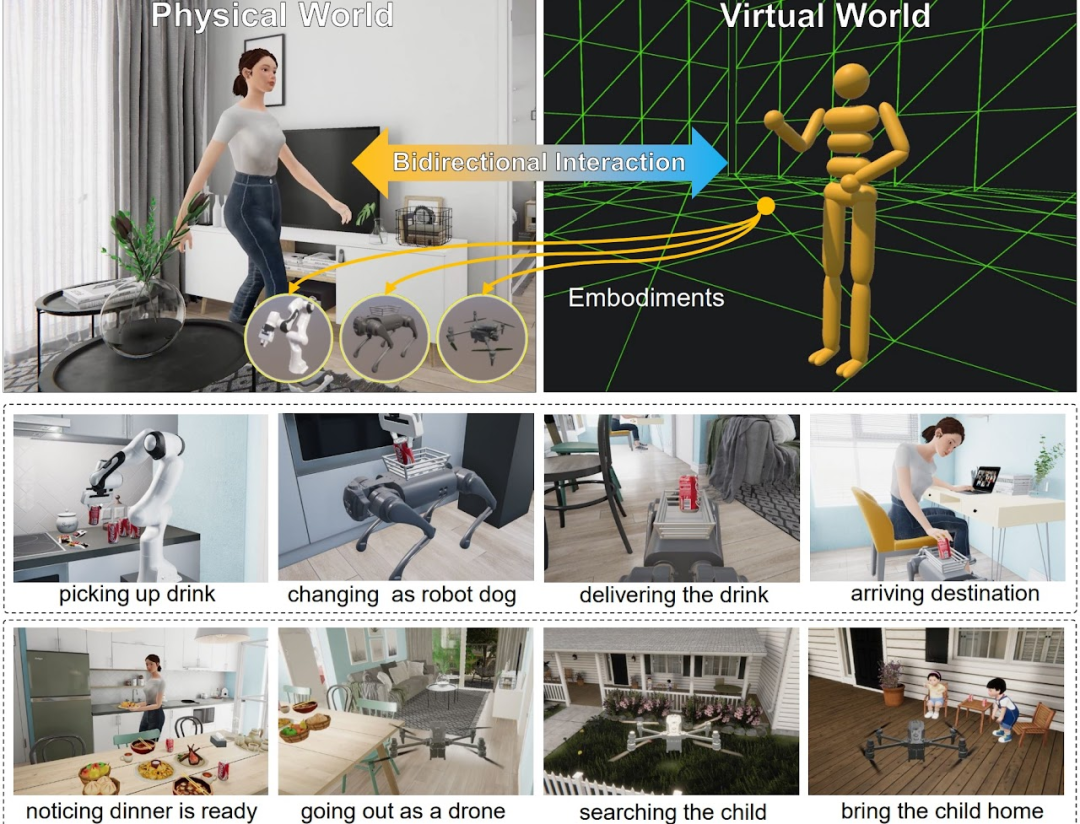
图4 智能体主动服务模拟
最后,我们模拟了一个智能体为人类提供服务的场景,试图以生活化的案例来说明对称现实的基本应用方式。在该场景中,智能体在虚拟空间和物理空间有着不同的具身形态。当人类主要在物理空间活动时,智能体可以基于自己的观测信号,主动为人类提供服务(如通过机械臂、机器狗等具身组件的协同配合来帮人准备饮料;或者利用无人机这种飞行单元快速寻找家庭成员并发起主动实时通信等)。这里在模拟环境下展示了智能体为人类提供实际帮助的例子,当然,如果人类采用VR设备进入虚拟世界的话,那么虚拟世界的具身就能够以更加多样化的形态在虚拟世界为人类提供帮助,成为虚拟世界中的一个协作伙伴。
05 结 论
总之,对称现实提供了一个全新的视角来看待当下和未来的人机共生形态,也为智能体如何朝着人类兼容的方向发展提供了一个研究范式。在实际应用上,对称现实或许可以为未来的人工智能,尤其是通用人工智能的发展提供一种新思路。例如,通研院提出的首个通用智能人“通通”,在虚拟空间已经具有自主产生任务、主动帮助的能力,未来,可将“通通”的通用底座应用于各类垂直场景,以各种具身智能的形式走进千家万户,赋能千行百业。
/参考文献 /
[1] Nadikattu, R. R. (2016). The emerging role of artificial intelligence in modern society. International Journal of Creative Research Thoughts.
[2] Peng, Y., Han, J., Zhang, Z., Fan, L., Liu, T., Qi, S., ... & Zhu, S. C. (2023). The tong test: Evaluating artificial general intelligence through dynamic embodied physical and social interactions. Engineering.
[3] Lapuschkin, S., Wäldchen, S., Binder, A., Montavon, G., Samek, W., & Müller, K. R. (2019). Unmasking Clever Hans predictors and assessing what machines really learn. Nature communications, 10(1), 1096.
[4] Minsky, M. (1988). Society of mind. Simon and Schuster.
[5] Rahwan, I., Cebrian, M., Obradovich, N., Bongard, J., Bonnefon, J. F., Breazeal, C., ... & Wellman, M. (2019). Machine behaviour. Nature, 568(7753), 477-486.
[6] Zhang, Z., Zhu, Y., & Zhu, S. C. (2020, October). Graph-based hierarchical knowledge representation for robot task transfer from virtual to physical world. In 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 11139-11145). IEEE.