抽象数据结构类型
Graphic操作接口
| 操作接口 | 功能描述 | 操作接口 | 功能描述 |
| e() | 获取图的总边数 | n() | 顶点的总数 |
| exits(v,u) | 判断v,u两个顶点是否存在边 | insert(v) |
在顶点集
V
中插入新顶点
v
|
| remove(v,u) | 删除从v 到u的 关联边 |
remove(v)
|
将顶点
v
从顶点集中删除
|
| type(v,u) | 边所属的类型(主要用于遍历树~) |
inDegree(v)
outDegree(v)
|
顶点
v的
入度、出度
|
| edge(v,u) | 该边所对应的 数据域 |
firstNbr(v)
|
顶点
v的
首个邻接顶点
|
| weight(v,u) | 该边所对应的 权重 |
nextNbr(v, u)
|
在
v的
邻接顶点中,
u
的后继
|
|
status(v)
| 顶点的状态 | ||
|
parent(v)
|
顶点
v
在遍历树中的父节点
|
Graphic抽象数据结构设计
🎈 顶点类:
// 节点简化封装
template<typename Tv>
struct Vertex
{
// 顶点val
Tv _data;
// 入度、出度、 父节点
int _inDegree, _outDegree, _parent;
VStatus _stat;
// 构造新节点
Vertex(const Tv& data = (Tv)0) :_data(data), _inDegree(0), _outDegree(0), _stat(UNDISCOVERED), _parent(-1){}
};其包含该顶点表示的数据域,以及顶点状态、入、出度数量等
🎈 关联边类:
// 边对象优化
template<typename Te>
struct Edge
{
//数据、权重、类型
Te _data;
int _weight;
EType _type;
Edge(const Te& data, int weight) :_data(data), _weight(weight), _type(UNDETERMINED){}
};关联边最直接的表现是两个顶点的连接情况~ 但在有些应用场景中,需要关联边的存储记录更详尽的数据,例如: 从四川开往北京的火车中,从成都 - 北京是一条线,从成都-西安-太原-北京又是另一条路线。这条线可以有这些数据: 路程长度、价格、时间长短,这就是关联便所能表示的数据域。
🎈 图类:
template<typename Tv,typename Te>
class Graph
{
protected:
int _n = 0; //顶点总数
int _e = 0; //边总数
public:
// 顶点
virtual Tv& vertex(int) = 0; // 顶点v癿数据(诠顶点癿确存在)
virtual int inDegree(int) = 0; // 顶点v癿入度(诠顶点癿确存在)
virtual int outDegree(int) = 0; //顶点v癿出度(诠顶点癿确存在)
virtual VStatus& status(int) = 0; //顶点v癿状态
virtual int& parent(int) = 0; //顶点v在遍历树中癿父亲
virtual int insert(Tv const&) = 0; // 插入顶点,返回编号
virtual Tv remove(int) = 0; // 初除顶点及其关联边,返回顶点信息
virtual int firstNbr(int) = 0; //顶点v癿首个邻接顶点
virtual int nextNbr(int, int) = 0; //顶点v的(相对亍顶点j癿)下一邻接顶点
// 边
virtual bool exists(int, int) = 0; //边(v, u)是否存在
virtual void insert(Te const&, int, int, int) = 0; //在顶点v和u乀间揑入权重为w癿边e
virtual Te remove(int, int) = 0; //初除顶点v和u之间的边e,返回该边信息
virtual EType& type(int, int) = 0; //边(v, u)的类型
virtual Te& edge(int, int) = 0; //边(v, u)的数据
virtual int& weight(int, int) = 0; //边(v, u) 的权重
// ... 在这里我只列举一部分出来
};这里选择的是模板类的设计,是为了兼容不同图的存储方式。其中,声明大量的纯虚函数,其本质就是为了让 子类全然重写这些函数。
🎃 邻接矩阵
// 基类进行重写
template<typename Tv,typename Te>
class GraphMatrix :public Graph<Tv, Te>
{
private:
// 数据抽象管理 —— 邻接表
vector<Vertex<Tv>> _V; // 顶点集合 —— 多少个顶点被插入
vector<vector<Edge<Te>*>> _E; // 边集合
// ... 完成 虚函数重写~
}接口函数实现:
{
// 顶点操作
virtual Tv& vertex(int i) { return _V[i]._data; }
virtual int inDegree(int i) { return _V[i].__inDegree; }
virtual int outDegree(int i) { return _V[i]._outDegree; }
virtual VStatus& status(int i) { return _V[i]._status; }
virtual int& parent(int i) { return _V[i]._parent; }
virtual int firstNbr(int i) { return nextNbr(i, _n); }
// 边的操作
virtual EType& type(int i, int j) { return _E[i][j]->_type; } // 边(i, j)的类型
virtual Te& edge(int i, int j) { return _E[i][j]->_data; } //边(i, j)的数据
virtual int& weight(int i, int j) { return _E[i][j]->_weight; } //边(i, j)的权重
virtual bool exists(int i, int j)
{
// 保证不越界
return ((i >= 0) && (i < _n) && (j >= 0) && (j < _n)) && _E[i][j] != nullptr;
}
}接口插入与删除的实现:
{
// 顶点动态插入 返回的是插入节点的 迭代器
virtual int insert(const Tv& vertex)
{
// 每个顶点新曾一列 —— 用于 关联这个新节点
for (int j = 0;j < _nVertexs;++j) _E[j].insert(nullptr);
// 创建该顶点 以及对应的 关联边默认为:nullptr
//vector<Edge*> new_matrix(n, nullptr);
//_E.push_back(new_matrix);
++_nVertexs;
_E.insert(_nVertexs, _nVertexs, (Edge<Te>*)nullptr);
return _V.insert(Vertex<Tv>(vertex));
}
// 顶点移除 初除第i个顶点及其兲联边(0 <= i < n)
virtual Tv remove(int i)
{
// 删除其所有的 入边
// i -> j
for (int j = 0;j < _nVertexs;++j)
if (exists(i, j)) { delete _E[i][j]; _V[j]._inDegree--; } // 当我们要删除某个顶点时,先将其边删除
// 删除其所有的 出边
// j -> i
for (int j = 0;j < _nVertexs;++j)
if (Edge<Te>* e = _E[j].erase(i)) { delete e; _V[j]._outDegree--; }
// 移除边
_E.erase(i);
_nVertexs--;
// 获取备份 + 从顶点集中移除
Tv vbak = vertex(i);
_V.erase(i);
return vbak; // 返回被删除顶点的信息
}
/
// 边的动态操作 针对两点 之间的边操作~
virtual void insert(const Te& edge,int w,int i,int j) // 针对带 权值的边e
{
if (exists(i, j)) return; // 已经存在边 不能插入了~
_E[i][j] = new Edge<Te>(edge, w); // 创建新边
++_eEdges;
// 更新关联点的 出入度
// [i,j] i --> j
_V[i]._outDegree++;
_V[j]._inDegree++;
}
virtual Te remove(int i, int j)
{
Te ebak = edge(i, j);
delete _E[i][j];
_E[i][j] = nullptr;
++_eEdges;
_V[i]._outDegree--;
_V[j]._inDegree--;
return ebak;
}
}
🎃 邻接表
关于邻接表如何进行的存储以及接口实现并不在此表述,只是稍微进行写一份伪代码~
template<typename Tv, typename Te>
class GraphTables :public Graph<Tv, Te>
{
private:
vector<Vertex<Tv>> _V; // 顶点集合
vector<Edge<Te>*> _tables; // 与顶点集合的下标对应 存储 真正的临界表~
unordered_map<Vertex<Tv>,int> _tablesMap; // 这里我们采用哈希结构 快速找到与顶点V 相关联的边
public:
virtual int insert(const Tv& vertex)
{
++_n;
// 直接入 顶点集合即可~
return _V.insert(Vertex<Tv>(vertex));
}
virtual void insert(const Te& edge, int w, int i, int j)
{
if (exists(i, j)) return;
Edge<Te>* new_edge = new Edge<Te>(edge, w);
// 你要进入哪个表?
int idx = _tablesMap[vertex(i, j)];
// 进行头插
new_edge->_next = _tables[idx];
_tables[idx] = new_edge;
int idx2 = _tablesMap[vertex(j, i)];
_V[idx]._outDegree++;
_V[idx]._inDegree++;
++_e;
}
// .... and so on ....
};注: 这里的所有实现本身就是一份伪代码,只是具有部分参考意义~
图的搜索遍历
广度优先搜索
template<typename Tv, typename Te>
void Graph<Tv, Te>::bfs(int s)
{
// 从每一个节点进行遍历~
int v = s; // s: 0 ~ n
do
{
if (status(v) == UNDISCOVERED) {
// 该节点没有被遍历 进行BFS
BFS(v);
}
} while (s != (v = (++v % n)); // 这里本质就是从第一个节点开始向后遍历~ 当v==n-1时 就会退出
}
template<typename Tv, typename Te>
void Graph<Tv, Te>::BFS(int v)
{
// 引入辅助队列 进行层序遍历~
queue<int> que;
status(v) = DISCOVERED; // 标记v已经被访问
while (!que.empty())
{
int front = que.front();
que.pop();
// firstNbr: u从n开始-- 直到找到 有关联的节点v
// 否则返回 -1
for (int u = firstNbr(front); -1 < u; u = nextNbr(front, u))
{
if (status(u) == UNDISCOVERED) {
// 该顶点尚未被 发掘插入进队列
status(u) = DISCOVERED;
que.push(u);
// 记录其他信息 这些步骤 对于简单的BFS或DFS可以不用
parent(u) = v;
type(v, u) = TREE; // 引入树边拓展支撑树
}
else {
type(v, u) = CROSS // 该节点 跨边了
}
}
status(front) = VISITED; // 该节点被访问了~
}
}"bfs()" 将所有存在于顶点集中的 顶点挨个进行迭代,每个顶点是否需要进行“BFS()”的根据在于是否处于 "UNDISCOVERED".
“BFS()”的每一步迭代,都需要从队列que中取出当前的 “首顶点”v,再对其邻居u顶点逐一筛查 —— 如果是“UNDISCOVERED” 入队列,否则记录 “CROSS”状态(这个状态再当前不考虑)~
深度优先搜索
template<typename Tv, typename Te>
void Graph<Tv, Te>::dfs(int s)
{
int v = s; // s: 0 ~ n
do
{
if (status(v) == UNDISCOVERED) {
BFS(v);
}
} while (s != (v = (++v % n));
}
template<typename Tv, typename Te>
void Graph<Tv, Te>::DFS(int v)
{
status(v) = DISCOVERED; // 标记该 顶点已经被遍历
for (int u = firstNbr(v); -1 < u; u = nextNbr(v, u))
{
// 找到自己邻居顶点u
switch (u)
{
case UNDISCOVERED:
// u尚未被发现 就以它进行 拓展~
type(v, u) = TREE;
parent(u) = v;
DFS(u);
break;
case DISCOVERED:
// u尚未访问完毕 v是u的祖先节点~
type(v, u) = BACKWARD;
break;
default:
break;
}
}
status(v) = VISITED; // 访问完毕~ ——> 该顶点的所有邻居顶点都完成了访问~
}深度优先搜索dfs通常都是使用递归方法来实现的,每一递归实例中,都先将当前节点v标记为 “DISCOVERED”,再逐一核对其各邻居u的状态并做相应处理。待其所有邻居均已处理完毕之后,将顶点v置为VISITED(访问完毕)状态,便可回溯。
若顶点u尚处于UNDISCOVERED,归类(v,u)的父子关系后,继续以u作为首顶点进行遍历。
DFS(s)返回后,所有访问过的顶点通过parent[]指针依次联接从整体上给出了顶点s所属连通或可达分量的一棵遍历树。
注: 这里的讨论仅限于 ”无向图“
有关图的其他应用
拓扑排序
template <typename Tv, typename Te>
stack<Tv>* Graph<Tv, Te>::tSort(int s)
{
// 用于记录 拓扑顺序
stack<Tv>* st = new stack<Tv>();
// 我们用每个节点进行拓扑~
do {
if (UNDISCOVERED == status(v)) {
if (!TSort(v, st)) {
while (!st->empty())
st->pop();
}
}
}while (s != (v = (++v % n)));
return st;
}
template <typename Tv, typename Te>
bool Graph<Tv, Te>::TSort(int v,stack<Tv>* st)
{
// 枚举v所在的顶点
for (int u = firstNbr(v), -1 < u;u = nextNbr(v, u))
{
switch (status(u))
{
case UNDISCOVERED:
parent(u) = v;
type(u, v) = TREE;
// 继续以u进行 拓扑
if (!TSort(u, st)) {
return false;
}
break;
case DISCOVERED:
// 出现了指向前驱 顶点的指针
type(v, u) = BACKWARD;
return false;
default:
// visited
return false;
}
}
// 说明以该顶点进行拓扑是顺利的
status(v) = VISITED;
st->push(v);
return true;
}相对于标准的DFS搜索算法,这里增设了一个栈结构。一旦某个顶点被标记为VISITED状态, 便随即令其入栈。如此,当搜索终止时,所有顶点即按照被访问完毕的次序,在栈中自顶向下而排列!
如果你感兴趣,可以试试这道考察图拓扑结构的题目: 课程表 ...
双连通域分解
template <typename Tv, typename Te>
void Graph<Tv, Te>::bcc(int s)
{
int v = s;
stack<int>* st = new stack<int>();
do {
if (UNDISCOVERED == status(v)) {
BCC(v, st);
// 访问完成
st->pop();
}
} while (s != 0);
}
#define hca(x) (fTime(x)) // 利用此处闲置的fTime[]充当hca[]
template<typename Te,typename Tv>
void Graph<Te, Tv>::BCC(int v, stack<int>* st)
{
// 标志更新
status(v) = DISCOVERED;
st->push(v);
// 遍历邻里节点
for (int u = firstNbr(v);u > -1;u = nextNbr(v, u))
{
switch (status(u))
{
case UNDISCOVERED:
parent(u) = v;
type(v, u) = TREE;
BCC(u, st);
if (hac(u) < dtime(v)) {
// u遍历回来后 发现自己可以指向v的先祖节点 那么v压根不能称为关节点
hca(v) = min(hca(v), hca(u)); // 进行更新v的先祖节点
}
else {
// v 是关节点
while (v != st->top()) {
st->pop();
}
}
break;
case DISCOVERED:
type(v, u) = BACKWARD; // 表示u一定是v的 先祖先
if (u != parent(v)) hac(v) = min(hca(v), dtime(u)); // 重新找先祖先
break;
default:
// visiatd
type(v, u) = (dtime(v) < dtime(u)) ? FOWARD : CROSS;
break;
}
}
status(v) = VISITED;
}DFS搜索在顶点v的孩子u处返回之后,通过比较hca[u]与dTime[v]的大小,即可判断v是否关节点。通过比较hca[u]与dTime[v],则说明u及其后代无法通过后向边与v的真祖先连通,故v为关节点。
最小生成树
Edge类封装:
struct Edge
{
size_t _srci;
size_t _dsti;
W _w;
Edge(size_t srci, size_t dsti, const W& w)
:_srci(srci)
, _dsti(dsti)
, _w(w)
{}
bool operator>(const Edge& e) const
{
return _w > e._w;
}
};Kruskal算法:

W Kruskal(Self& minTree)
{
// 初始化
int n = _vertex.size();
minTree._vertex = _vertex;
minTree._tablemap = _tablemap;
minTree._edges.resize(_edges.size());
for (size_t i = 0;i < minTree._edges.size();++i)
minTree._edges[i].resize(n, MAX_W);
// 凭借优先级队列 选出权值最短的两条边
priority_queue<Edge, vector<Edge>, greater<Edge>> minque;
for(int i=0;i<n;++i)
for (int j = 0;j < n;++j)
{
if (i < j && _edges[i][j] != MAX_W)
{
minque.push(Edge(i, j, _edges[i][j]));
}
}
// 选边
size_t size = 0; // 是否满足生成树条件
W totalW = W();
UnionFindSet ufs(n);
while (!minque.empty())
{
auto min = minque.top();
minque.pop();
if (!ufs.isSet(min._srci, min._dsti))
{
minTree._AddEdge(min._srci, min._dsti, min._w);
ufs.Union(min._srci, min._dsti);
size++;
totalW += min._w;
}
}
if (size == n - 1) return totalW;
else return W();
}Prim算法:
W Prim(Self& minTree, const V& vv)
{
size_t srci = getVertexIndex(vv);
// 进行初始化
int n = _vertex.size();
minTree._vertex = _vertex;
minTree._tablemap = _tablemap;
minTree._edges.resize(n);
for (int i = 0;i < n;++i)
minTree._edges[i].resize(n,MAX_W);
// 以vv作为顶点纳入minqueue
priority_queue<Edge, vector<Edge>, greater<Edge>> minque;
// 将与vv有关的边加入队列
for (int i = 0;i < n;++i)
if (_edges[srci][i] != MAX_W)
minque.push(Edge(srci, i, _edges[srci][i]));
// 开始选边
size_t size = 0; // 记录选择的边数 n - 1 结束
W totalW = W(); // 按照这个方式选择的边权数
// 生成树其本质就是一种树形结构
// 判断一个子图是否构成回路 即看它能否通过某条路径回到原点
vector<int> start(n, false);
vector<int> end(n, true);
start[srci] = true; // 作为起点开始
end[srci] = false; // 不会作为终边
while (!minque.empty())
{
auto min = minque.top();
minque.pop();
// 现在是以dsti 作为顶点 是否被访问过
if (!start[min._dsti]){
// 选择出了一条边min
minTree._AddEdge(min._srci, min._dsti, min._w);
// 注意这里需要更新 desi!
start[min._dsti] = true;
end[min._dsti] = false; // 自己不能再称为ends
size++;
totalW += min._w;
if (size == n - 1) break;
// 将新纳入的顶点 dsti 关联边也纳入
for (int i = 0;i < n;++i)
{
// 该边必须存在 且这个顶点不能是 作为作为终点的!
if (_edges[min._dsti][i] != MAX_W && end[i])
{
minque.push(Edge(min._dsti, i, _edges[min._dsti][i]));
}
}
}
else {
// ... 不构成边 ...
}
}
if (size == n - 1) return totalW;
else return W();
}最短路径
| 最短路径算法 | Dijstrak | Bellman-ford | Floyd-warshall |
| 时间复杂度 | O(n^2) | O(e*n) | O(n^3) |
| 空间复杂度 | O(m) | O(m) | O(n^2) |
| 适用情况 | 稠密图 | 稀疏图(暴力更新边) | 稠密图 |
| 负权 | 存在负权问题 | 无 | 无 |
Dijkstra算法:

几个问题:
🎨 我们需要从除S集合内以外的点中,找到最短边,是不是仍然可以使用 优先级队列帮我们完成这部分排序?
使用优先级队列当然能为我们在选取阶段,一定能选到 ”边值最小边“,但我们最终是通过选“顶点”来规划处 “最短路径”。优先级队列首要的缺陷就在于其不能 ”随意(random)访问“,后面还会牵涉到更新最小路径重新建堆等问题,优先级队列在这里并不适用~
所以,我们使用vector来保存顶点到顶点的最短路径值,使用直接映射的方式,使得我们在更细最短路径值时,也会变得十分简单~
🎨 更新出最短路径值就好了吗? 我咋知道你更新的结果是否正确呢? 换言之,我们需要去记录最短路径 —— 到底过了哪些顶点。
我们同样采用vector数组,顶点与下标直接映射的方式,每一个位置保存着前驱下标。所以,我们能看到最终更新出的结果,该路径数组是倒序的。
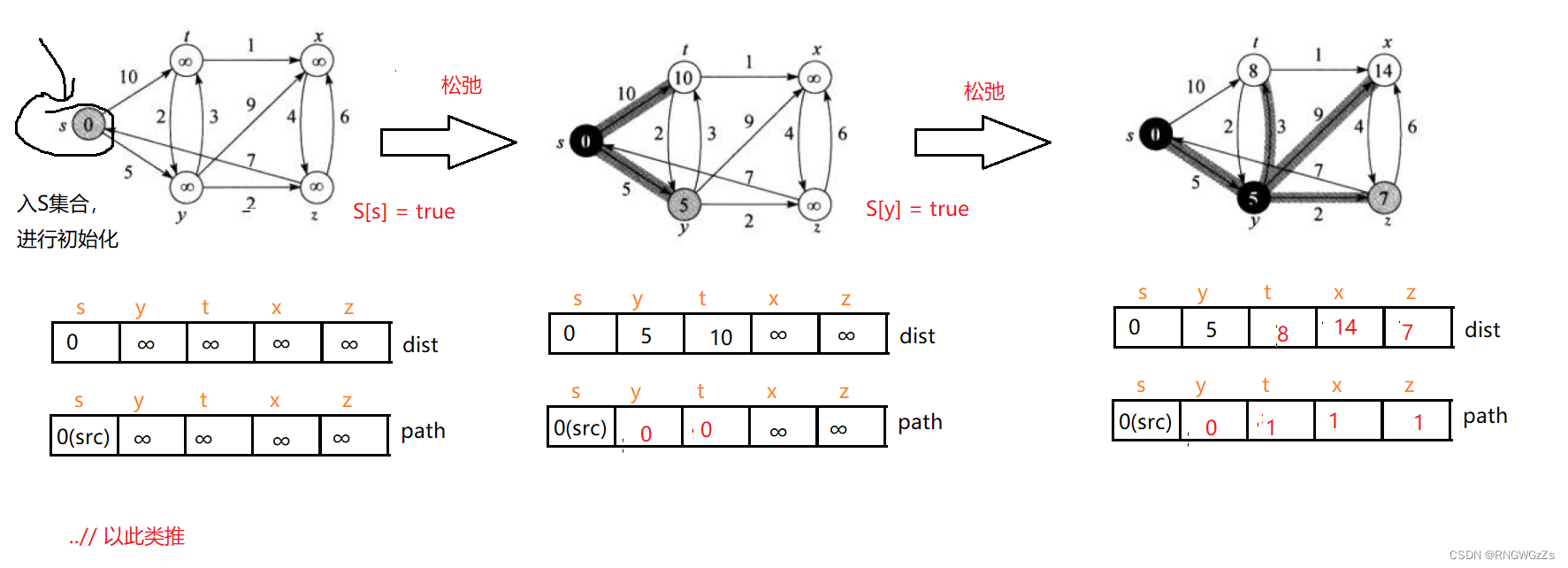
void DijKstra(const V& vv, vector<W>& distance, vector<int>& path)
{
size_t n = _vertex.size();
size_t srci = getVertexIndex(vv);
distance.resize(n,MAX_W); // 最短路径集
path.resize(n, -1); // 记录路径
vector<bool> S(n, false); // 纳入集合中的点
// 进行初始化
distance[srci] = 0; // 以srci为起点
path[srci] = srci;
// 遍历j个顶点
for (size_t j = 0;j < n;++j)
{
// 进行归纳
int u = 0; // 要纳入的顶点
W min = MAX_W; // 每次选取最小边
for (size_t i = 0;i < n;++i)
{
// 首次进入 选取的u == srci
if (S[i] == false && distance[i] < min)
{
u = i;
min = distance[i];
}
}
// 纳入集合S
S[u] = true;
// 松弛操作
// 从u开始,朝其未被纳入S集合的 顶点更新最短距离
for (size_t v = 0;v < n;++v)
{
// 该点是没被纳入集合S的 && 该顶点与u是有关联边的 && 它们的当前值一定是最小的
if (S[v] == false && _edges[u][v] != MAX_W && _edges[u][v] + distance[u] < distance[v]) {
distance[v] = _edges[u][v] + distance[u];
// 记录路径
path[v] = u; // 从u->v
}
}
}
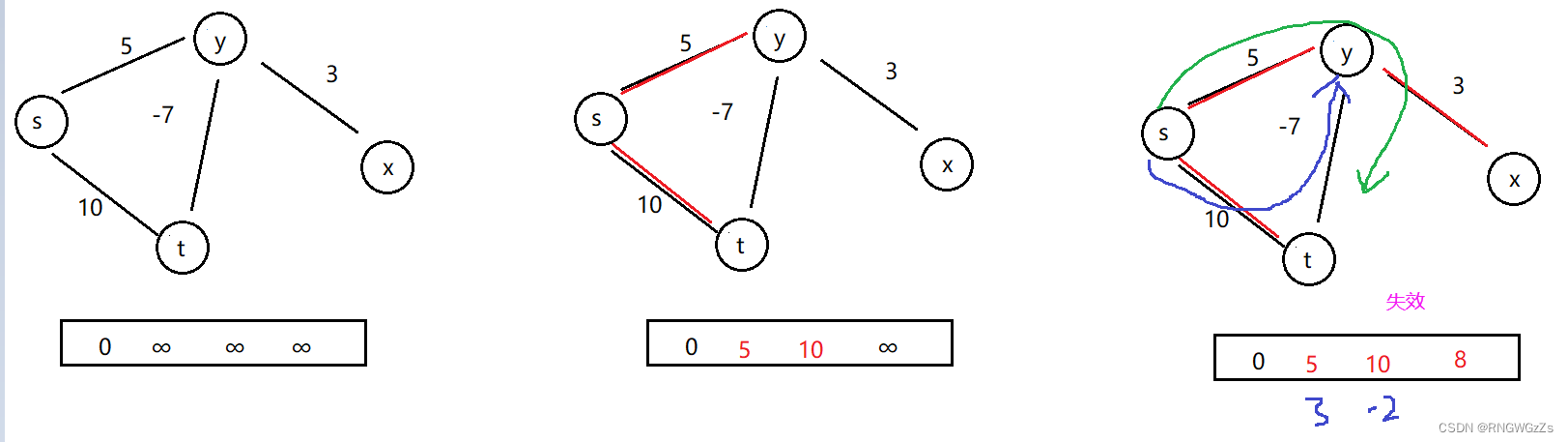
}当Dijkstra遇到负权路径时,就可能发生失效~
Bellman-ford算法:
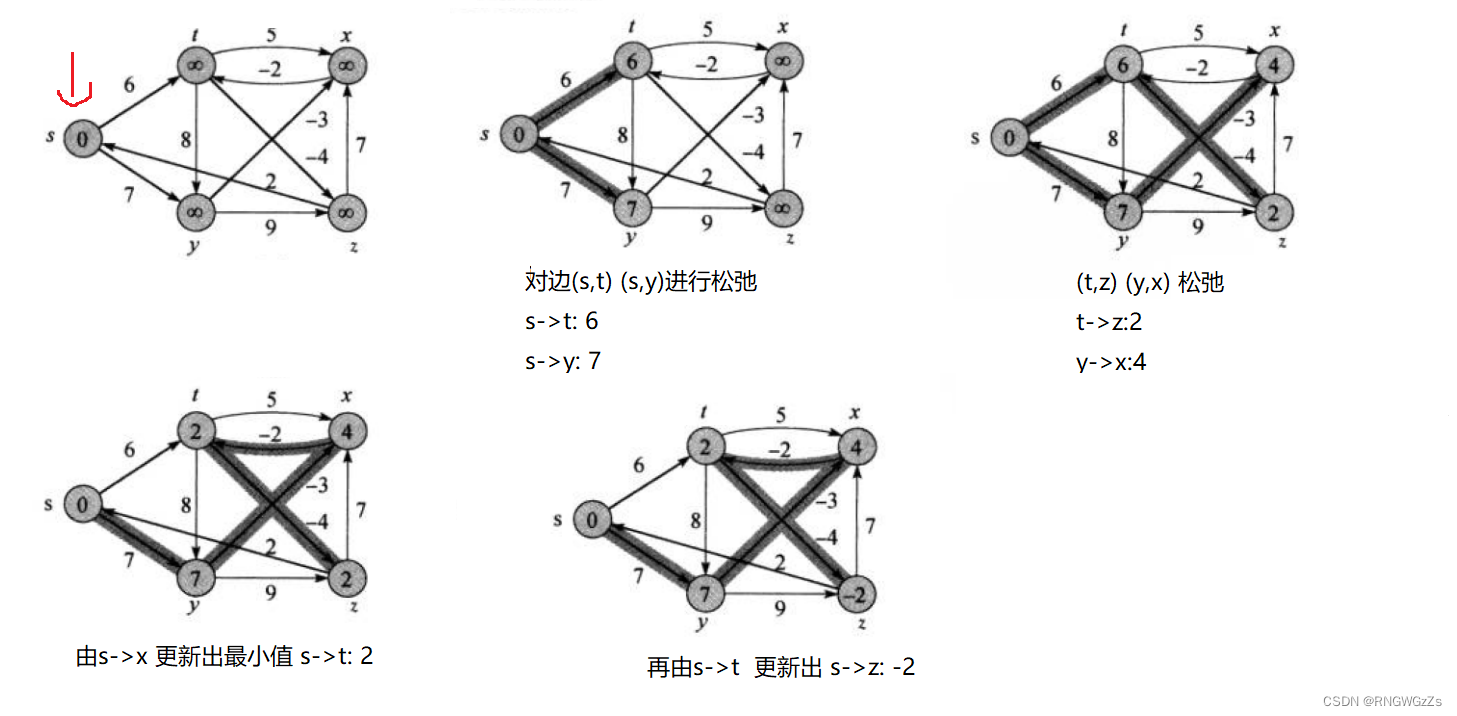
Bellman-ford每次循环都会对有向图G内的所有顶点进行权值更新。每次循环迭代都不一样,所以需要更新多次~
bool BellmanFord(const V& src, vector<W>& dist, vector<int>& pPath)
{
size_t n = _vertex.size();
size_t srci = getVertexIndex(src);
dist.resize(n, MAX_W);
pPath.resize(n, -1);
// 初始化
dist[srci] = W(); // 给定一个初始值
// 现在不用记录更新哪些顶点 因为每个顶点都得更新!
for (int k = 0;k < n;++k)
{
// 性能优化 如果不发生更新 说明已经更新完成了 不必再循环了
bool update = false;
// 以每一个顶点作为 srci进行遍历
// i --> j
for (size_t i = 0; i < n; ++i)
{
for (size_t j = 0;j < n;++j)
{
if (_edges[i][j] != MAX_W && _edges[i][j] + dist[i] < dist[j]) {
// 满足min 进行更新
update = true;
dist[j] = _edges[i][j] + dist[i];
pPath[j] = i;
}
}
}
if (update == false) break;
}
// 判断负权回路
for (size_t i = 0; i < n; ++i)
{
for (size_t j = 0; j < n; ++j)
{
// 存在负权回路是没有最短路径的 其会一直更新~
if (_matrix[i][j] != MAX_W && dist[i] + _matrix[i][j] < dist[j])
{
return false;
}
}
}
return true;
}
Floyd-warshall算法:
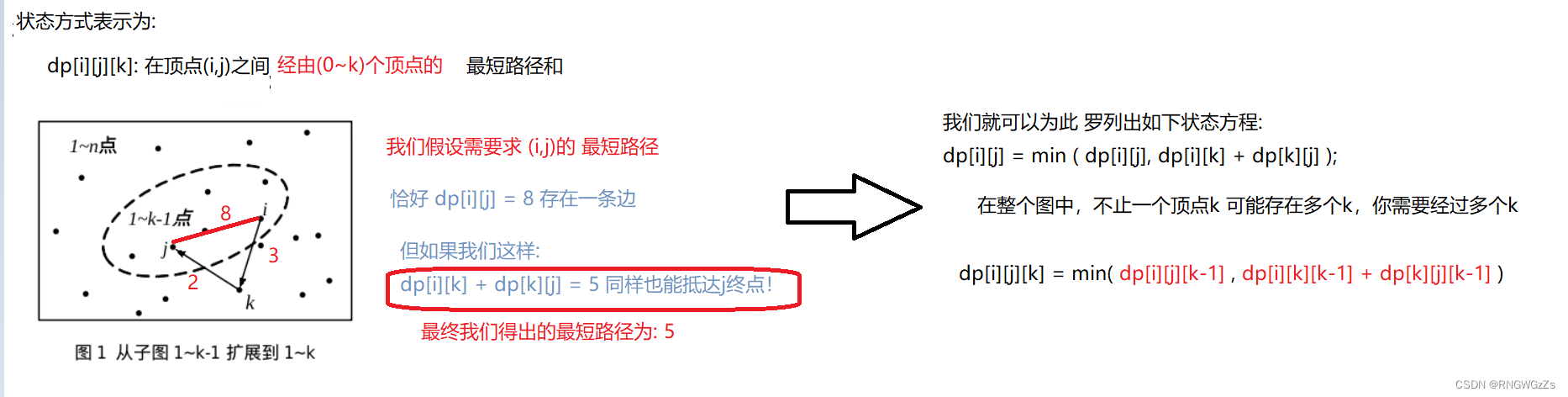
void FloydWarshall(vector<vector<W>>& vvDist, vector<vector<int>>& vvpPath)
{
size_t n = _vertex.size();
vvDist.resize(n);
vvpPath.resize(n);
// 初始化
for (size_t i = 0; i < n; ++i)
{
vvDist[i].resize(n, MAX_W);
vvpPath[i].resize(n, -1);
}
// 更新直接相连的边
for (size_t i = 0;i < n;++i)
{
for (size_t j = 0;j < n;++j)
{
if (_edges[i][j] != MAX_W)
{
vvDist[i][j] = _edges[i][j];
vvpPath[i][j] = i;
}
}
}
// 动态规划 假设k个转点
for (size_t k = 0; k < n; ++k)
{
for (size_t i = 0; i < n; ++i)
{
for (size_t j = 0; j < n; ++j)
{
if (vvDist[i][k] != MAX_W && vvDist[k][j] != MAX_W &&
vvDist[i][k] + vvDist[k][j] < vvDist[i][j])
{
vvDist[i][j] = vvDist[i][k] + vvDist[k][j];
// (i,j) 作为子节点 由 [k][j] 进行遍历
vvpPath[i][j] = vvpPath[k][j];
}
}
}
}
}