文章目录
- 前言
- LIO-SAM
- 环境
- 编译
- 运行
- 键盘控制
- 编译lio-sam遇到的问题
前言
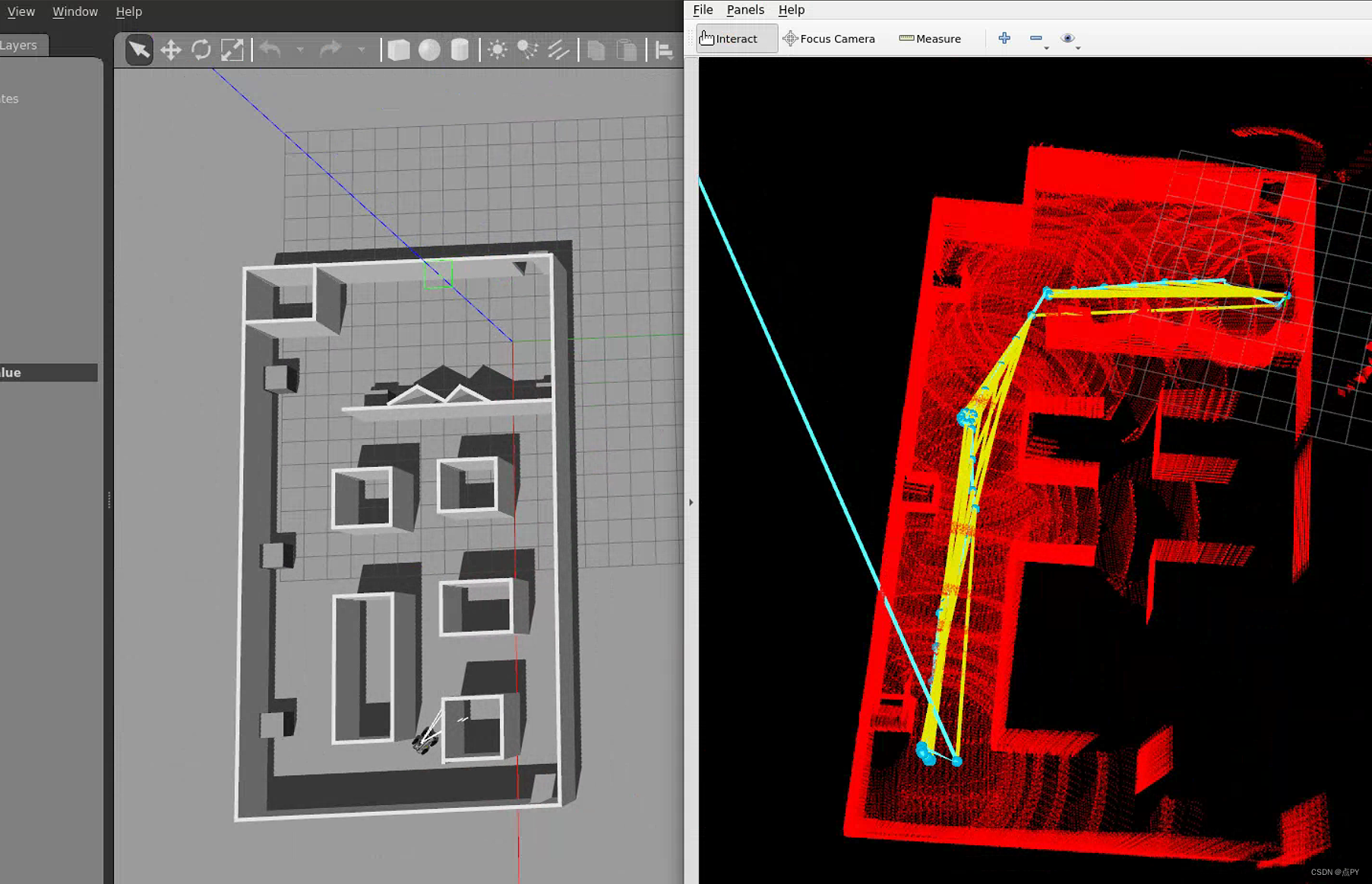
Gazebo 仿真提供了一个高效且成本低廉的平台,使研究人员和开发者能够在安全且可控的虚拟环境中设计、测试和优化机器人系统。它允许快速原型制作和迭代,精确控制测试条件,并能模拟复杂或危险的场景,从而避免了在真实环境中可能遇到的风险和成本。
LIO-SAM
LIO-SAM(Lidar Inertial Odometry and Mapping)是一种高效的实时激光雷达惯性里程计和地图构建系统。这个系统利用3D激光雷达、惯性测量单元(IMU)和GPS(可选)的数据,来实现精确的状态估计和环境映射。LIO-SAM采用因子图优化方法,通过将传感器数据整合到统一的优化框架中,实现对机器人姿态和环境地图的高精度估计。
<