1.总结任务调度算法之间的区别,重新实现一遍任务调度算法的代码。
(1)抢占式调度:高优先级任务可以打断低优先级任务,用于任务优先级不同的任务
(2)时间片轮转:相同优先级的任务,分配相同的时间片(一般为 1ms),当任务的时间片用完后,必须退出
(3)协作式调度:一般使用 osDelay 实现,任务之间协商着执行,相当于是:抢占式调度+时间片轮转
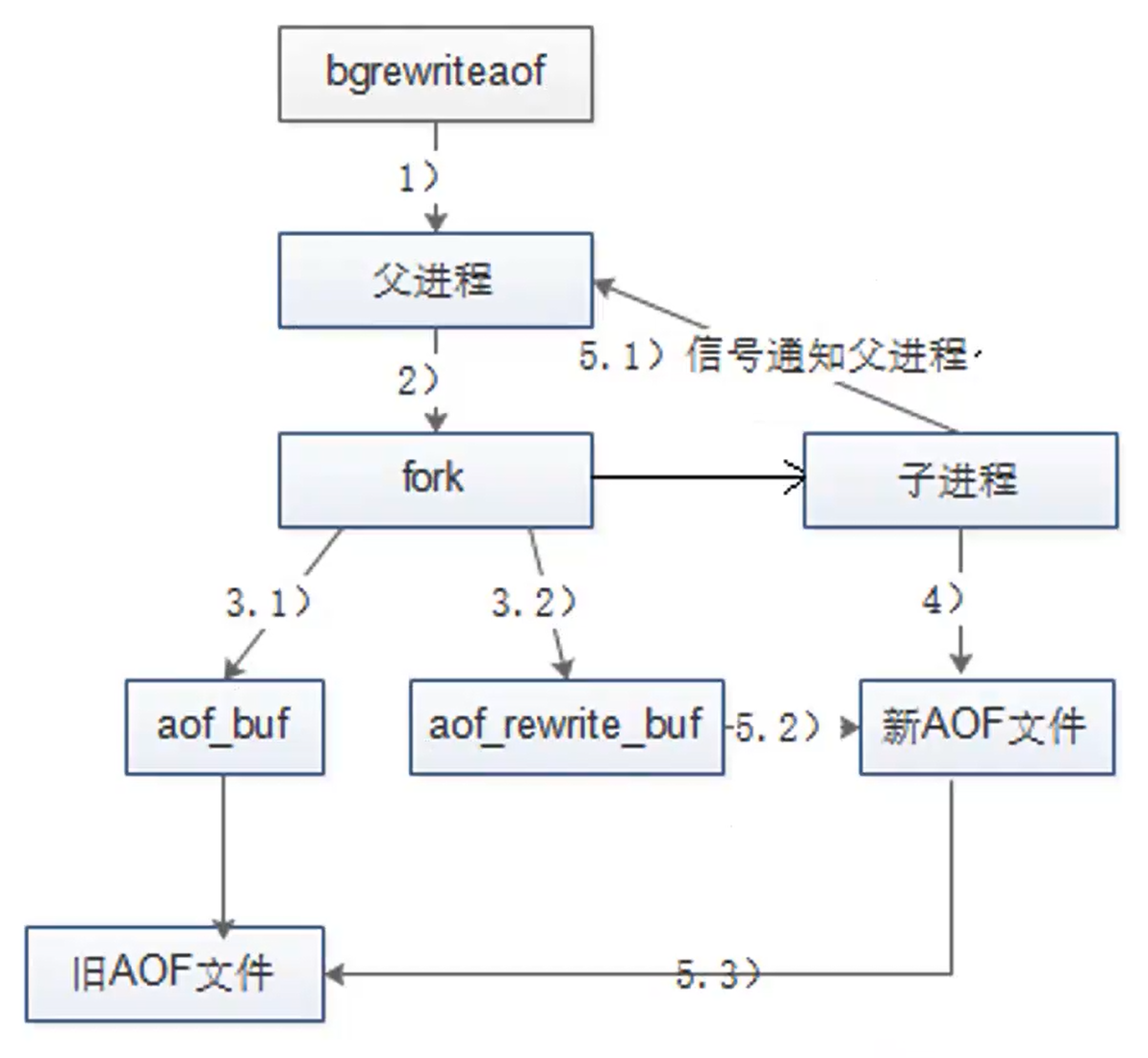
2.总结静态创建任务和动态创建任务的区别,以及动态创建任务和静态创建任务的源码分析步骤。
(1)动态创建任务无需指定具体的栈,只需要给定栈的大小即可,它会调用 vportmalloc函数自己指定,静态创建任务既需要制定具体的栈,
可以使用数组来指定,也需要给定栈的大小
(2)动态创建任务耗费的资源比静态创建任务耗费的资源多
(3)动态创建任务适用于需要随时申请和随时释放的场景,而静态创建任务适用于明确任务具体数目的场景
3.总结任务的状态,以及任务状态之间的转换关系。
任务的状态:就绪态、运行态、阻塞态、挂起态
就绪态--->运行态:任务一经创建就处于就绪态,当程序执行任务时,就进入运行态
运行态--->就绪态:当任务执行结束后,就会回到就绪态
就绪态--->挂起态:通过 vTaskSuspend() 函数可以将任务挂起,可以实现从就绪态转换为挂起态
挂起态--->就绪态:通过 vTaskResume() 函数可以将任务从挂起状态中恢复,可以实现从挂起态转换为就绪态
运行态--->挂起态:通过 vTaskSuspend() 函数可以将任务挂起,可以实现从运行态转换为挂起态
阻塞态--->挂起态:通过 vTaskSuspend() 函数可以将任务挂起,可以实现从阻塞态转换为挂起态
阻塞态--->就绪态:当等待的事件完成后(时间、信号量、互斥量等满足条件时),就可以从阻塞态进入就绪态
运行态--->阻塞态:当处于等待事件发生的状态时,就会进入阻塞态
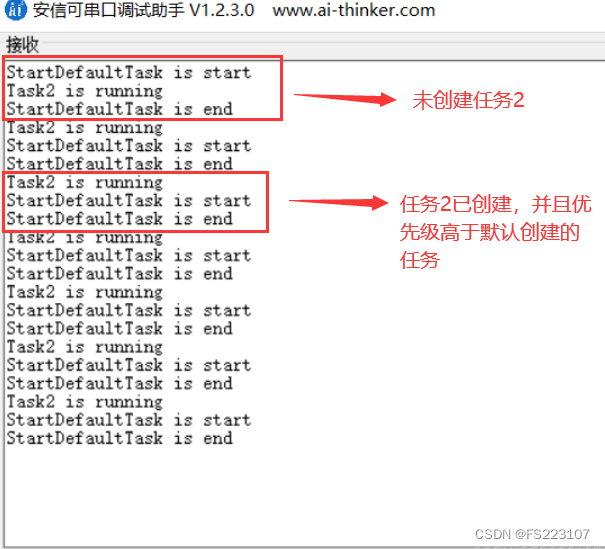
1.抢占式调度
代码:
void StartDefaultTask(void *argument)
{
/* USER CODE BEGIN StartDefaultTask */
/* Infinite loop */
for(;;)
{
printf("StartDefaultTask is start\r\n");
if(Task2Handle == NULL)
{
Task2Handle = osThreadNew(Task2, NULL, &Task2_attributes);
}
printf("StartDefaultTask is end\r\n");
osDelay(500);
}
/* USER CODE END StartDefaultTask */
}
/* Private application code --------------------------------------------------*/
/* USER CODE BEGIN Application */
void Task2(void *argument)
{
for(;;)
{
printf("Task2 is running\r\n");
osDelay(500);
}
}效果图:
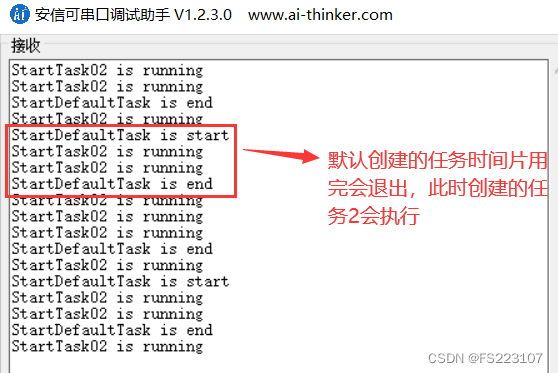
2.时间片轮转
代码:
void StartDefaultTask(void *argument)
{
/* USER CODE BEGIN StartDefaultTask */
/* Infinite loop */
int i=0;
for(;;)
{
printf("StartDefaultTask is start\r\n");
for(i = 0;i < 10000000;i++)
{
; //消耗时间
}
printf("StartDefaultTask is end\r\n");
osDelay(500);
}
/* USER CODE END StartDefaultTask */
}
/* USER CODE BEGIN Header_StartTask02 */
/**
* @brief Function implementing the myTask02 thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask02 */
void StartTask02(void *argument)
{
/* USER CODE BEGIN StartTask02 */
/* Infinite loop */
for(;;)
{
printf("StartTask02 is running\r\n");
osDelay(500);
}
/* USER CODE END StartTask02 */
}效果图:
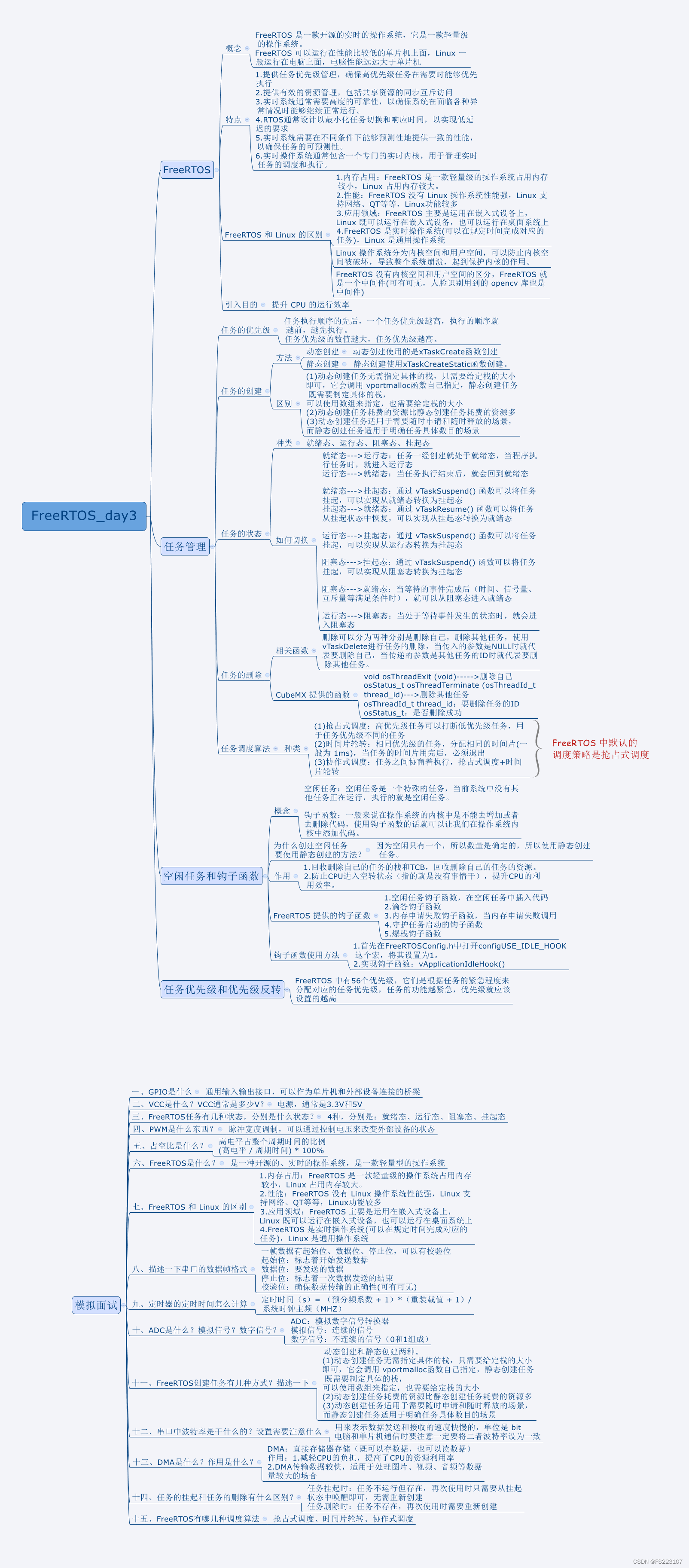
思维导图