本文首发于公众号:机器感知
MambaMixer、NeSLAM、Talk3D、BundledSLAM、ShapeFusion
ShapeFusion: A 3D diffusion model for localized shape editing
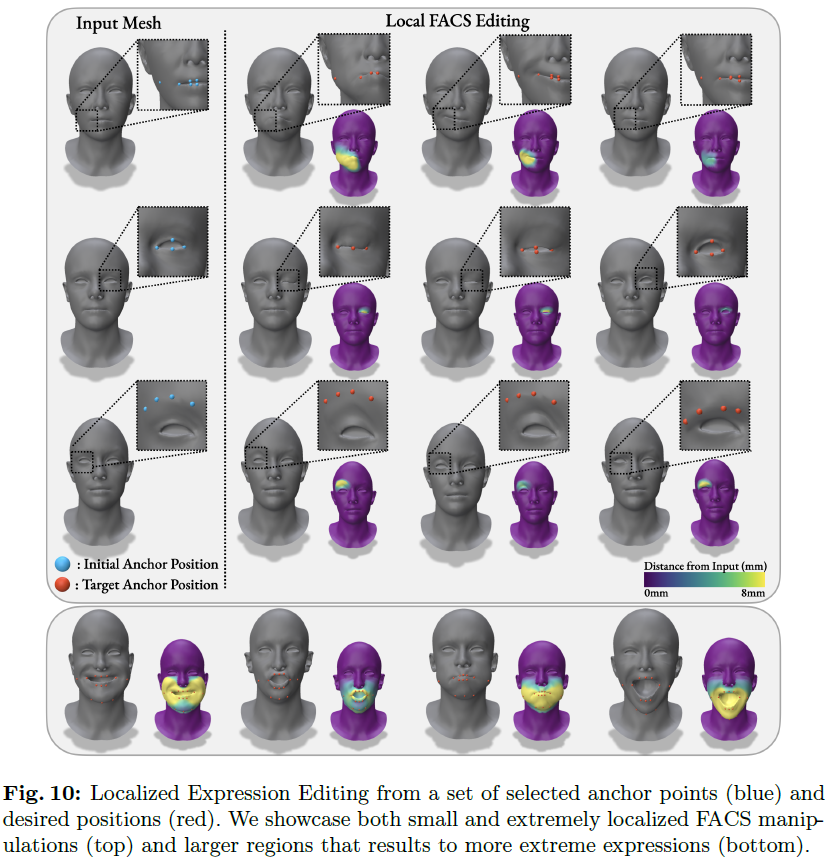
In the realm of 3D computer vision, parametric models have emerged as a ground-breaking methodology for the creation of realistic and expressive 3D avatars. Traditionally, they rely on Principal Component Analysis (PCA), given its ability to decompose data to an orthonormal space that maximally captures shape variations. However, due to the orthogonality constraints and the global nature of PCA's decomposition, these models struggle to perform localized and disentangled editing of 3D shapes, which severely affects their use in applications requiring fine control such as face sculpting. In this paper, we leverage diffusion models to enable diverse and fully localized edits on 3D meshes, while completely preserving the un-edited regions. We propose an effective diffusion masking training strategy that, by design, facilitates localized manipulation of any shape region, without being limited to predefined regions or to sparse sets of predefined control vertices. Following our fra......
BundledSLAM: An Accurate Visual SLAM System Using Multiple Cameras
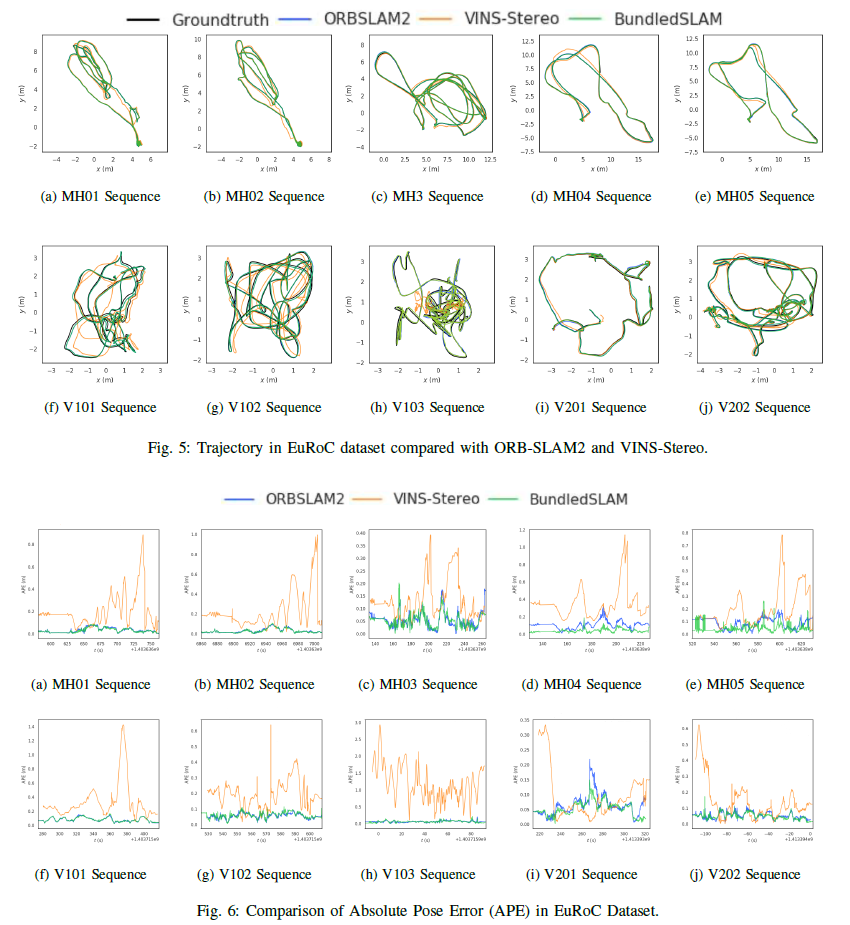
Multi-camera SLAM systems offer a plethora of advantages, primarily stemming from their capacity to amalgamate information from a broader field of view, thereby resulting in heightened robustness and improved localization accuracy. In this research, we present a significant extension and refinement of the state-of-the-art stereo SLAM system, known as ORB-SLAM2, with the objective of attaining even higher precision.To accomplish this objective, we commence by mapping measurements from all cameras onto a virtual camera termed BundledFrame. This virtual camera is meticulously engineered to seamlessly adapt to multi-camera configurations, facilitating the effective fusion of data captured from multiple cameras. Additionally, we harness extrinsic parameters in the bundle adjustment (BA) process to achieve precise trajectory estimation.Furthermore, we conduct an extensive analysis of the role of bundle adjustment (BA) in the context of multi-camera scenarios, delving into its impac......
MambaMixer: Efficient Selective State Space Models with Dual Token and Channel Selection
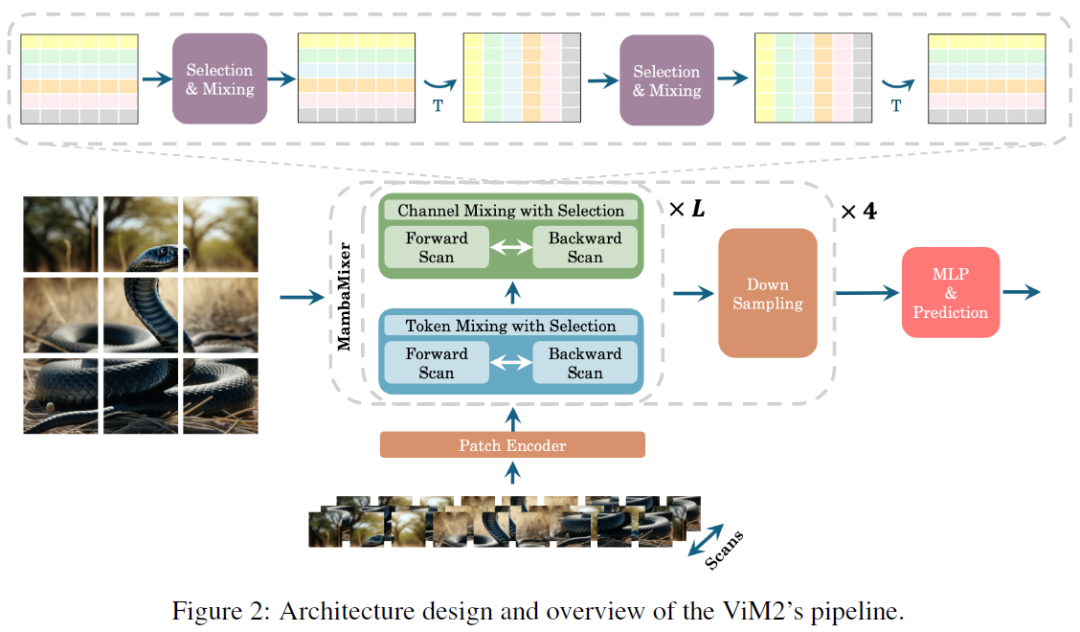
Recent advances in deep learning have mainly relied on Transformers due to their data dependency and ability to learn at scale. The attention module in these architectures, however, exhibits quadratic time and space in input size, limiting their scalability for long-sequence modeling. Despite recent attempts to design efficient and effective architecture backbone for multi-dimensional data, such as images and multivariate time series, existing models are either data independent, or fail to allow inter- and intra-dimension communication. Recently, State Space Models (SSMs), and more specifically Selective State Space Models, with efficient hardware-aware implementation, have shown promising potential for long sequence modeling. Motivated by the success of SSMs, we present MambaMixer, a new architecture with data-dependent weights that uses a dual selection mechanism across tokens and channels, called Selective Token and Channel Mixer. MambaMixer connects selective mixers using......
Structure Matters: Tackling the Semantic Discrepancy in Diffusion Models for Image Inpainting
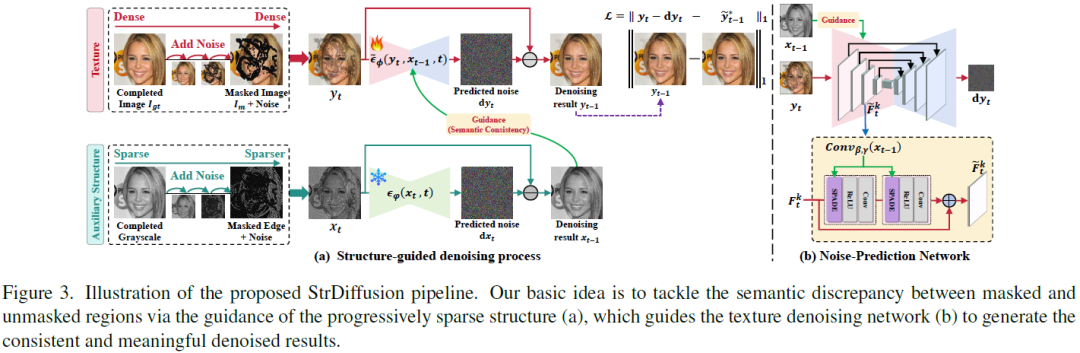
Denoising diffusion probabilistic models for image inpainting aim to add the noise to the texture of image during the forward process and recover masked regions with unmasked ones of the texture via the reverse denoising process.Despite the meaningful semantics generation,the existing arts suffer from the semantic discrepancy between masked and unmasked regions, since the semantically dense unmasked texture fails to be completely degraded while the masked regions turn to the pure noise in diffusion process,leading to the large discrepancy between them.In this paper,we aim to answer how unmasked semantics guide texture denoising process;together with how to tackle the semantic discrepancy,to facilitate the consistent and meaningful semantics generation.To this end,we propose a novel structure-guided diffusion model named StrDiffusion,to reformulate the conventional texture denoising process under structure guidance to derive a simplified denoising objective for image inpaintin......
Diff-Reg v1: Diffusion Matching Model for Registration Problem
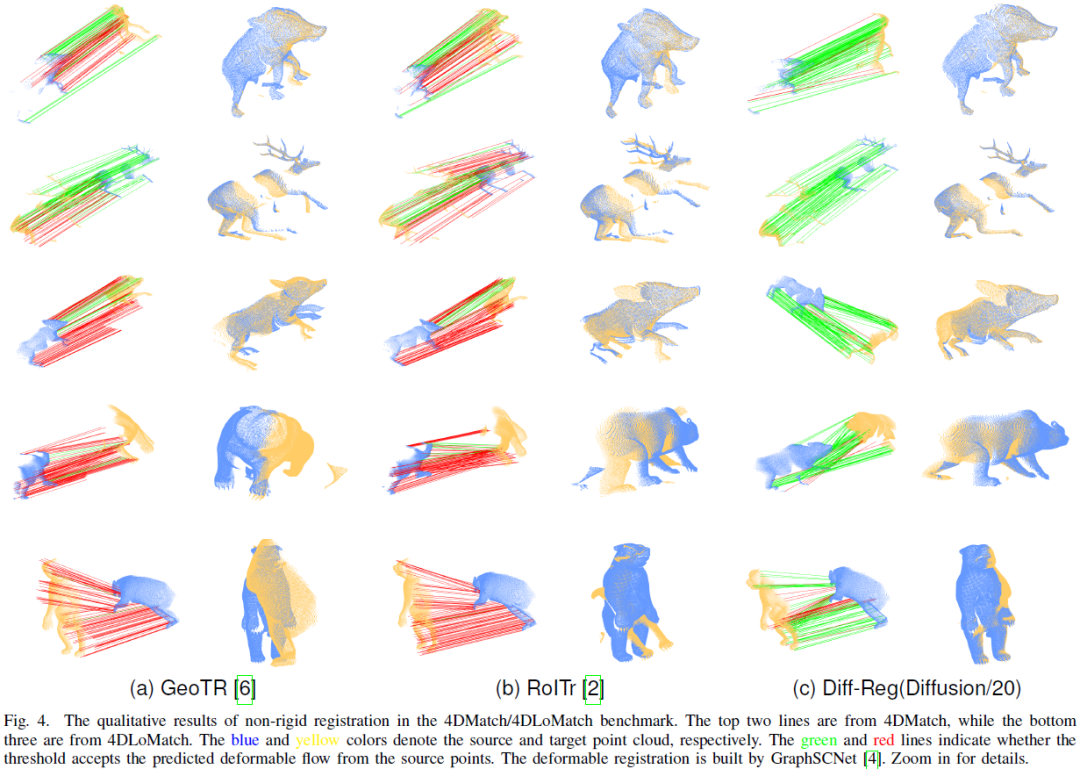
Establishing reliable correspondences is essential for registration tasks such as 3D and 2D3D registration. Existing methods commonly leverage geometric or semantic point features to generate potential correspondences. However, these features may face challenges such as large deformation, scale inconsistency, and ambiguous matching problems (e.g., symmetry). Additionally, many previous methods, which rely on single-pass prediction, may struggle with local minima in complex scenarios. To mitigate these challenges, we introduce a diffusion matching model for robust correspondence construction. Our approach treats correspondence estimation as a denoising diffusion process within the doubly stochastic matrix space, which gradually denoises (refines) a doubly stochastic matching matrix to the ground-truth one for high-quality correspondence estimation. It involves a forward diffusion process that gradually introduces Gaussian noise into the ground truth matching matrix and a rever......
HO-Gaussian: Hybrid Optimization of 3D Gaussian Splatting for Urban Scenes
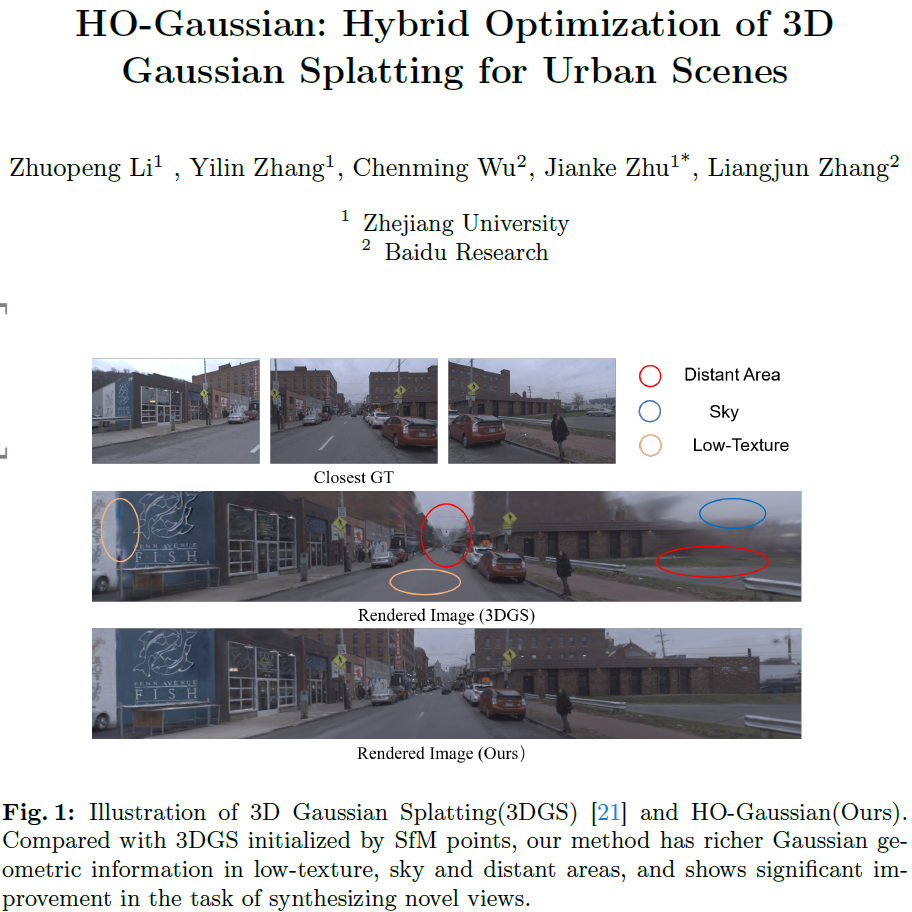
The rapid growth of 3D Gaussian Splatting (3DGS) has revolutionized neural rendering, enabling real-time production of high-quality renderings. However, the previous 3DGS-based methods have limitations in urban scenes due to reliance on initial Structure-from-Motion(SfM) points and difficulties in rendering distant, sky and low-texture areas. To overcome these challenges, we propose a hybrid optimization method named HO-Gaussian, which combines a grid-based volume with the 3DGS pipeline. HO-Gaussian eliminates the dependency on SfM point initialization, allowing for rendering of urban scenes, and incorporates the Point Densitification to enhance rendering quality in problematic regions during training. Furthermore, we introduce Gaussian Direction Encoding as an alternative for spherical harmonics in the rendering pipeline, which enables view-dependent color representation. To account for multi-camera systems, we introduce neural warping to enhance object consistency across di......
NeSLAM: Neural Implicit Mapping and Self-Supervised Feature Tracking With Depth Completion and Denoising
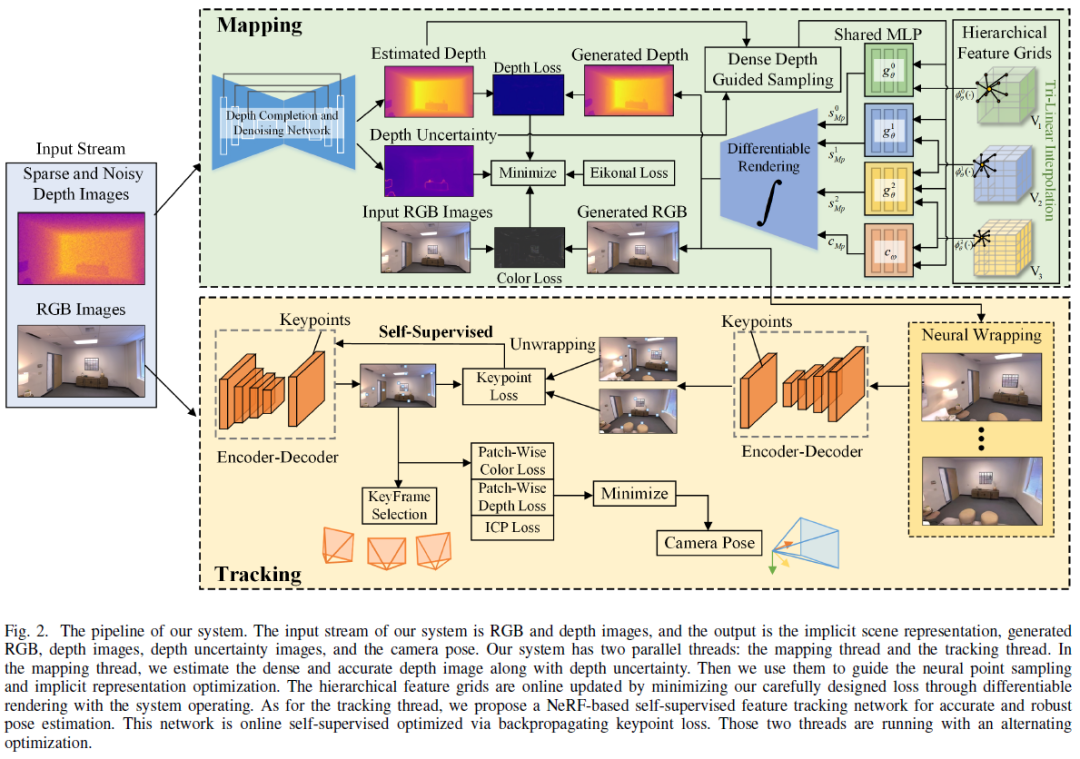
In recent years, there have been significant advancements in 3D reconstruction and dense RGB-D SLAM systems. One notable development is the application of Neural Radiance Fields (NeRF) in these systems, which utilizes implicit neural representation to encode 3D scenes. This extension of NeRF to SLAM has shown promising results. However, the depth images obtained from consumer-grade RGB-D sensors are often sparse and noisy, which poses significant challenges for 3D reconstruction and affects the accuracy of the representation of the scene geometry. Moreover, the original hierarchical feature grid with occupancy value is inaccurate for scene geometry representation. Furthermore, the existing methods select random pixels for camera tracking, which leads to inaccurate localization and is not robust in real-world indoor environments. To this end, we present NeSLAM, an advanced framework that achieves accurate and dense depth estimation, robust camera tracking, and realistic synthe......
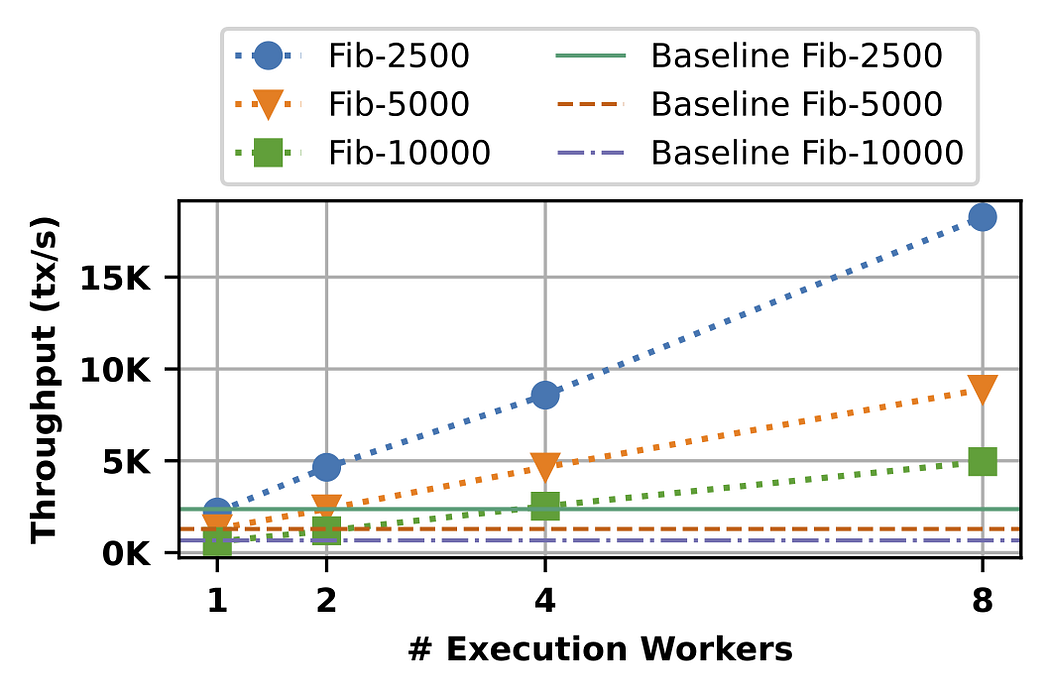
Transformer-Lite: High-efficiency Deployment of Large Language Models on Mobile Phone GPUs
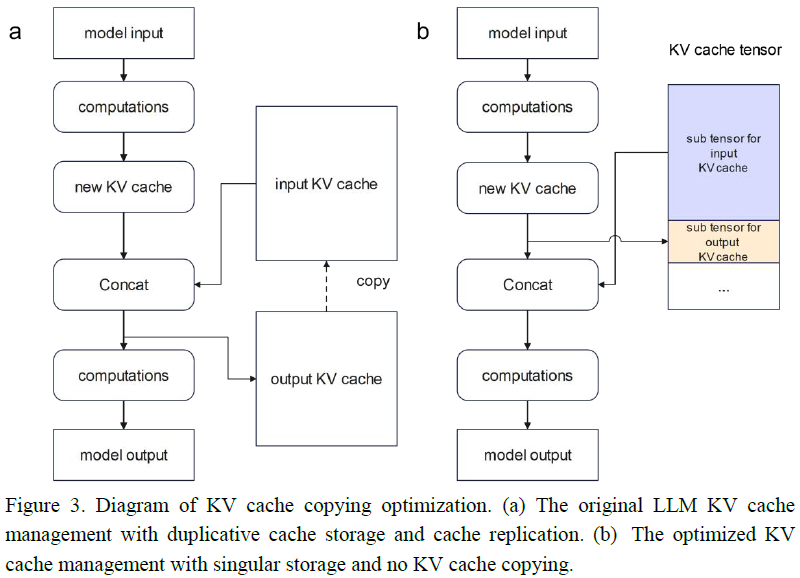
The Large Language Model (LLM) is widely employed for tasks such as intelligent assistants, text summarization, translation, and multi-modality on mobile phones. However, the current methods for on-device LLM deployment maintain slow inference speed, which causes poor user experience. To facilitate high-efficiency LLM deployment on device GPUs, we propose four optimization techniques: (a) a symbolic expression-based approach to support dynamic shape model inference; (b) operator optimizations and execution priority setting to enhance inference speed and reduce phone lagging; (c) an FP4 quantization method termed M0E4 to reduce dequantization overhead; (d) a sub-tensor-based technique to eliminate the need for copying KV cache after LLM inference. Furthermore, we implement these methods in our mobile inference engine, Transformer-Lite, which is compatible with both Qualcomm and MTK processors. We evaluated Transformer-Lite's performance using LLMs with varied architectures and......
SGD: Street View Synthesis with Gaussian Splatting and Diffusion Prior
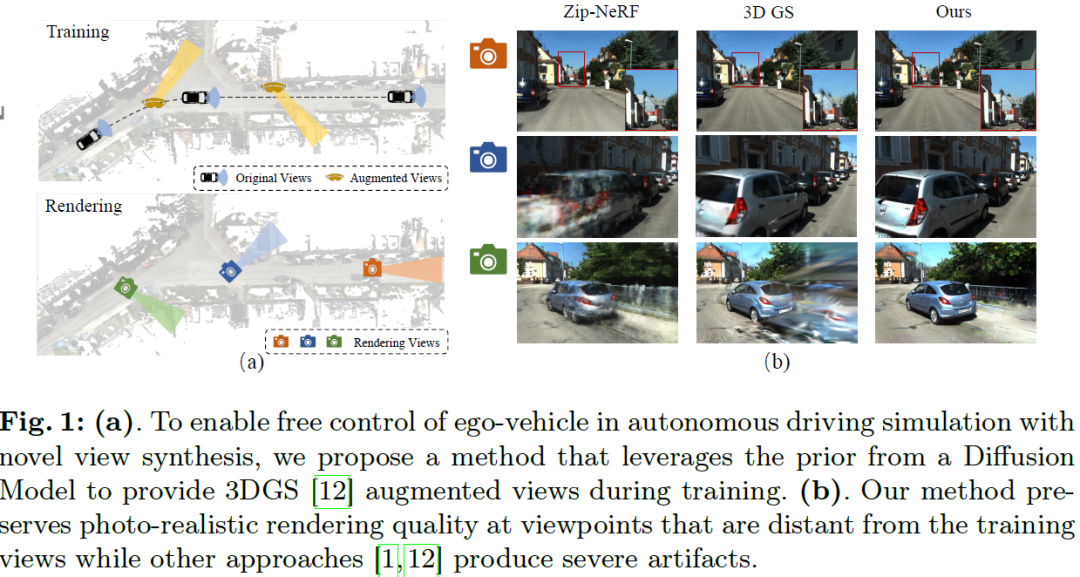
Novel View Synthesis (NVS) for street scenes play a critical role in the autonomous driving simulation. The current mainstream technique to achieve it is neural rendering, such as Neural Radiance Fields (NeRF) and 3D Gaussian Splatting (3DGS). Although thrilling progress has been made, when handling street scenes, current methods struggle to maintain rendering quality at the viewpoint that deviates significantly from the training viewpoints. This issue stems from the sparse training views captured by a fixed camera on a moving vehicle. To tackle this problem, we propose a novel approach that enhances the capacity of 3DGS by leveraging prior from a Diffusion Model along with complementary multi-modal data. Specifically, we first fine-tune a Diffusion Model by adding images from adjacent frames as condition, meanwhile exploiting depth data from LiDAR point clouds to supply additional spatial information. Then we apply the Diffusion Model to regularize the 3DGS at unseen views d......
StegoGAN: Leveraging Steganography for Non-Bijective Image-to-Image Translation
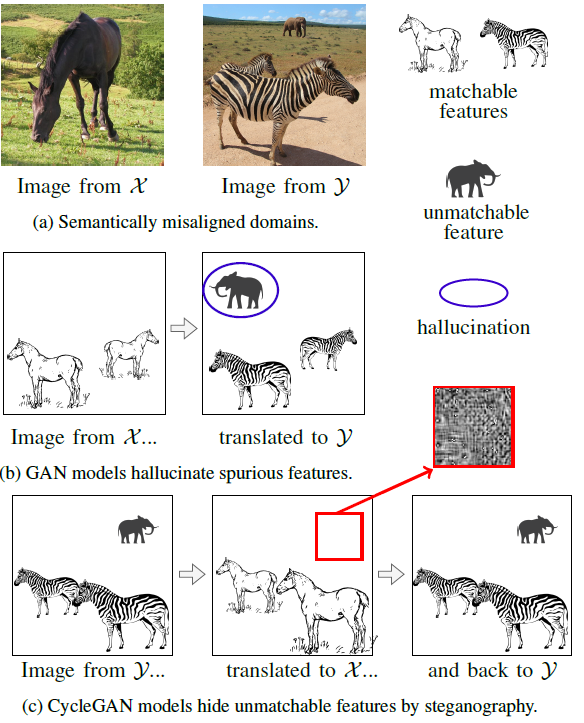
Most image-to-image translation models postulate that a unique correspondence exists between the semantic classes of the source and target domains. However, this assumption does not always hold in real-world scenarios due to divergent distributions, different class sets, and asymmetrical information representation. As conventional GANs attempt to generate images that match the distribution of the target domain, they may hallucinate spurious instances of classes absent from the source domain, thereby diminishing the usefulness and reliability of translated images. CycleGAN-based methods are also known to hide the mismatched information in the generated images to bypass cycle consistency objectives, a process known as steganography. In response to the challenge of non-bijective image translation, we introduce StegoGAN, a novel model that leverages steganography to prevent spurious features in generated images. Our approach enhances the semantic consistency of the translated ima......
Talk3D: High-Fidelity Talking Portrait Synthesis via Personalized 3D Generative Prior
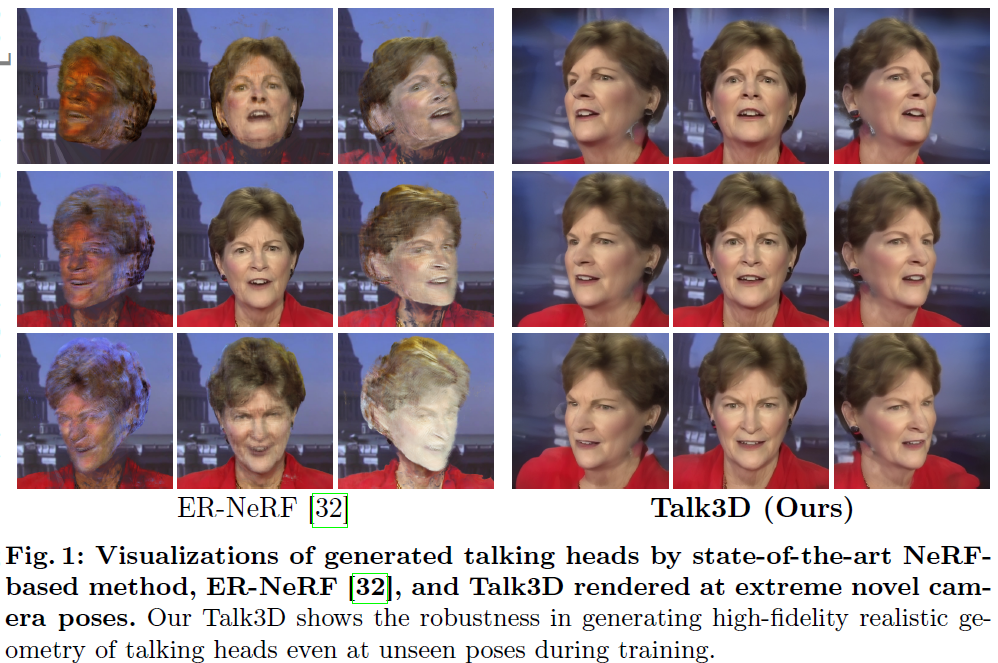
Recent methods for audio-driven talking head synthesis often optimize neural radiance fields (NeRF) on a monocular talking portrait video, leveraging its capability to render high-fidelity and 3D-consistent novel-view frames. However, they often struggle to reconstruct complete face geometry due to the absence of comprehensive 3D information in the input monocular videos. In this paper, we introduce a novel audio-driven talking head synthesis framework, called Talk3D, that can faithfully reconstruct its plausible facial geometries by effectively adopting the pre-trained 3D-aware generative prior. Given the personalized 3D generative model, we present a novel audio-guided attention U-Net architecture that predicts the dynamic face variations in the NeRF space driven by audio. Furthermore, our model is further modulated by audio-unrelated conditioning tokens which effectively disentangle variations unrelated to audio features. Compared to existing methods, our method excels in ......
Motion Inversion for Video Customization
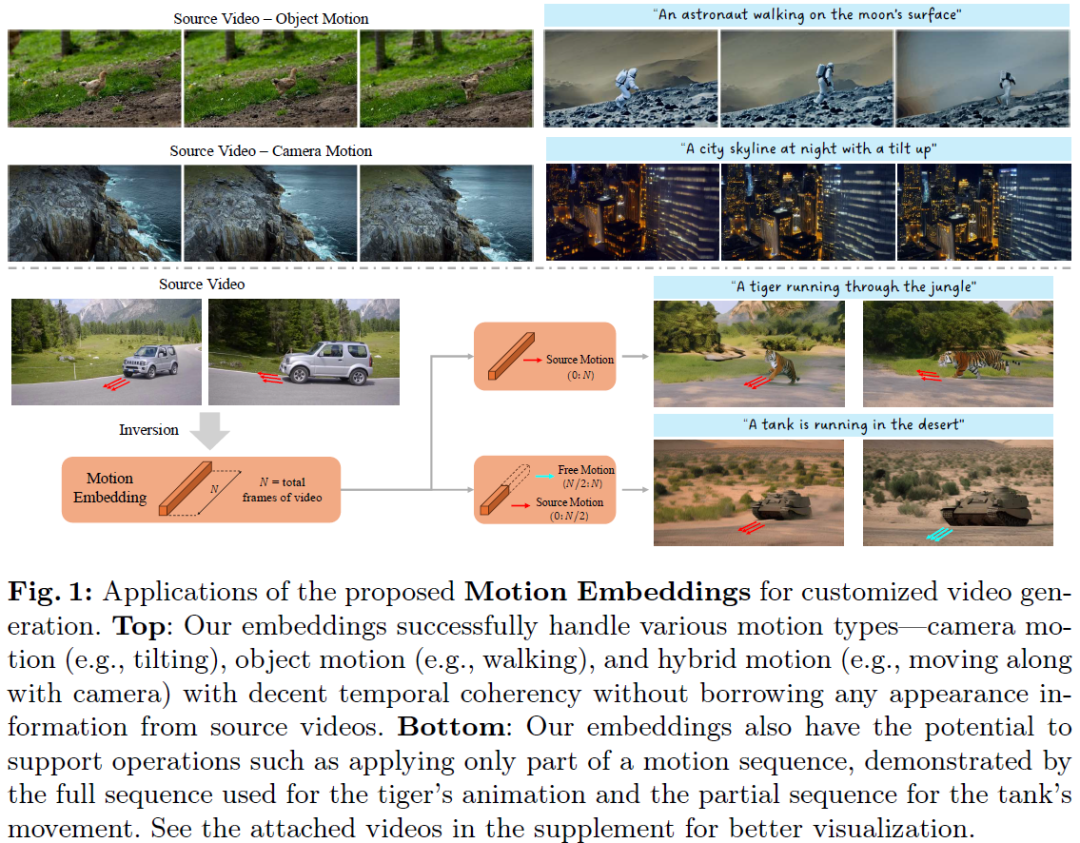
In this research, we present a novel approach to motion customization in video generation, addressing the widespread gap in the thorough exploration of motion representation within video generative models. Recognizing the unique challenges posed by video's spatiotemporal nature, our method introduces Motion Embeddings, a set of explicit, temporally coherent one-dimensional embeddings derived from a given video. These embeddings are designed to integrate seamlessly with the temporal transformer modules of video diffusion models, modulating self-attention computations across frames without compromising spatial integrity. Our approach offers a compact and efficient solution to motion representation and enables complex manipulations of motion characteristics through vector arithmetic in the embedding space. Furthermore, we identify the Temporal Discrepancy in video generative models, which refers to variations in how different motion modules process temporal relationships between......
U-VAP: User-specified Visual Appearance Personalization via Decoupled Self Augmentation
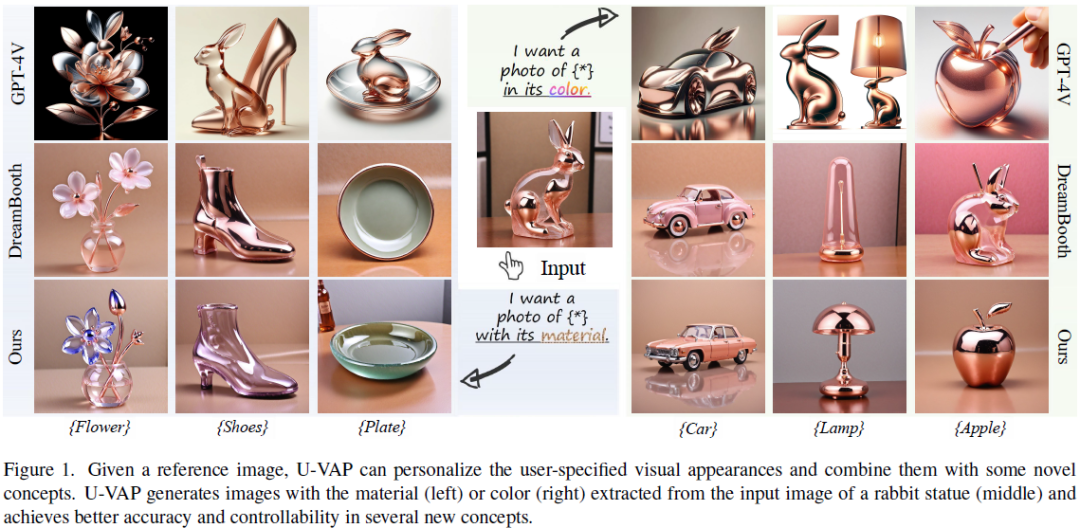
Concept personalization methods enable large text-to-image models to learn specific subjects (e.g., objects/poses/3D models) and synthesize renditions in new contexts. Given that the image references are highly biased towards visual attributes, state-of-the-art personalization models tend to overfit the whole subject and cannot disentangle visual characteristics in pixel space. In this study, we proposed a more challenging setting, namely fine-grained visual appearance personalization. Different from existing methods, we allow users to provide a sentence describing the desired attributes. A novel decoupled self-augmentation strategy is proposed to generate target-related and non-target samples to learn user-specified visual attributes. These augmented data allow for refining the model's understanding of the target attribute while mitigating the impact of unrelated attributes. At the inference stage, adjustments are conducted on semantic space through the learned target and no......
Relation Rectification in Diffusion Model

Despite their exceptional generative abilities, large text-to-image diffusion models, much like skilled but careless artists, often struggle with accurately depicting visual relationships between objects. This issue, as we uncover through careful analysis, arises from a misaligned text encoder that struggles to interpret specific relationships and differentiate the logical order of associated objects. To resolve this, we introduce a novel task termed Relation Rectification, aiming to refine the model to accurately represent a given relationship it initially fails to generate. To address this, we propose an innovative solution utilizing a Heterogeneous Graph Convolutional Network (HGCN). It models the directional relationships between relation terms and corresponding objects within the input prompts. Specifically, we optimize the HGCN on a pair of prompts with identical relational words but reversed object orders, supplemented by a few reference images. The lightweight HGCN ad......




![Vue element-plus 导航栏 [el-menu]](https://img-blog.csdnimg.cn/direct/cad688c77fb44593af301196dd40a963.png)