文章目录
- 书生·浦语大模型全链路开源体系视频笔记
- Intern2模型体系
- 训练数据集
- 书生浦语全链条开源开放体系
- 开放高质量语料数据
- 预训练
- 微调
- 中立全面性能榜单
- 大模型评测全栈工具链
- 部署
- 书生·浦语大模型全链路开源体系-Bilibili视频
- InternLM2技术报告(中文)
- InternLM2技术报告(英文)
书生·浦语大模型全链路开源体系视频笔记
Intern2模型体系
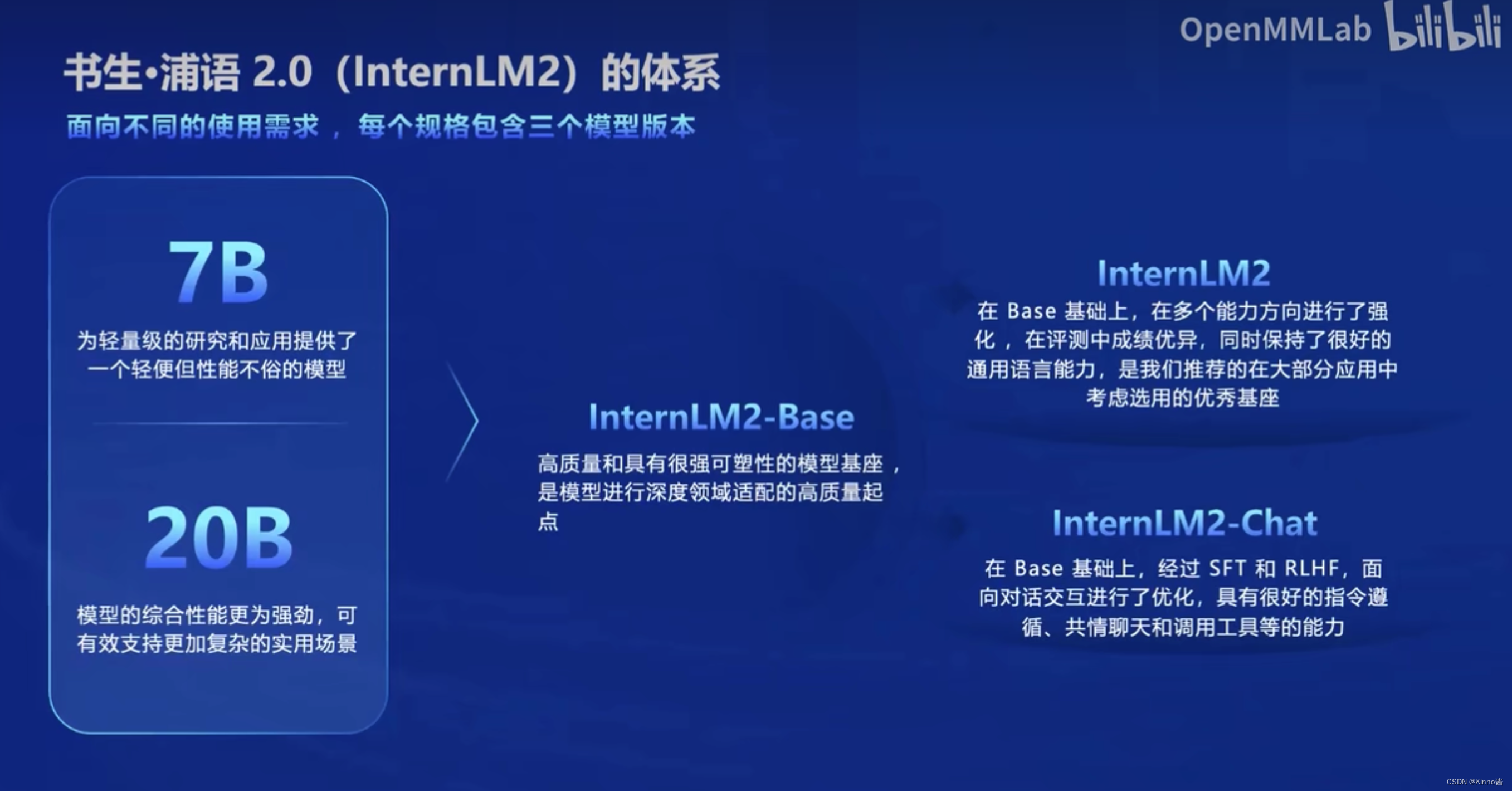
InternLM2开放了多个版本的模型:
-
InternLM2-Base:高质量、强可塑性的基座模型。
-
InternLM2:在Base基础上,在多个能力进行了强化,更优秀的基座模型。(看InternLM技术报告似乎是进行了增强训练
Enhancement Training) -
InternLM2-Chat:在Base基础上,再经过SFT和RLHF对齐后的对话模型。面向对话交互进行了优化,具有良好的指令遵循能力。
训练数据集
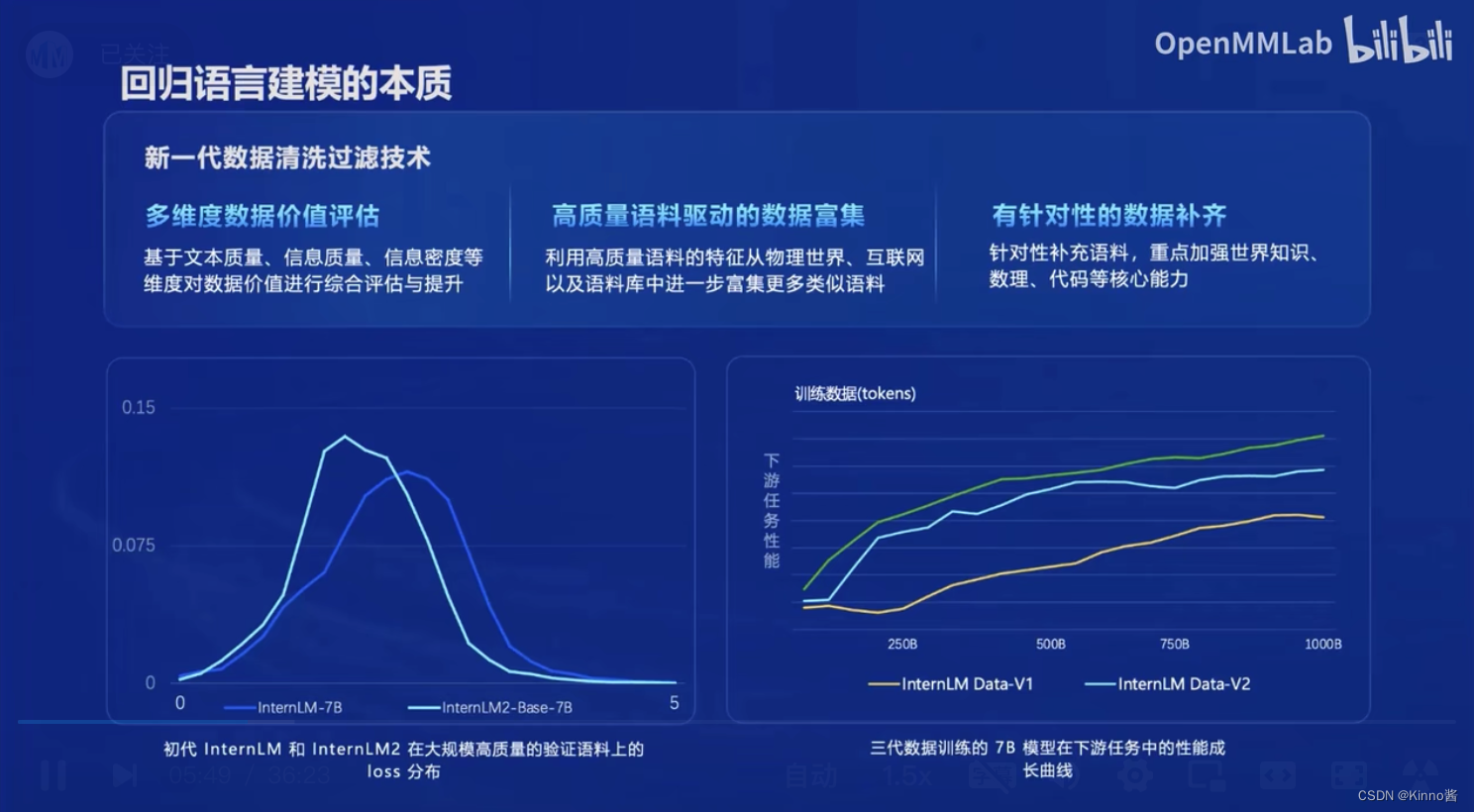
采用多种创造性方法,清洗和过滤数据集。
书生浦语全链条开源开放体系

我们能利用书生·浦语的框架,完整的开发属于自己的大模型应用。相对于第一期,InternLM2增加了Lagent和AgentLego。
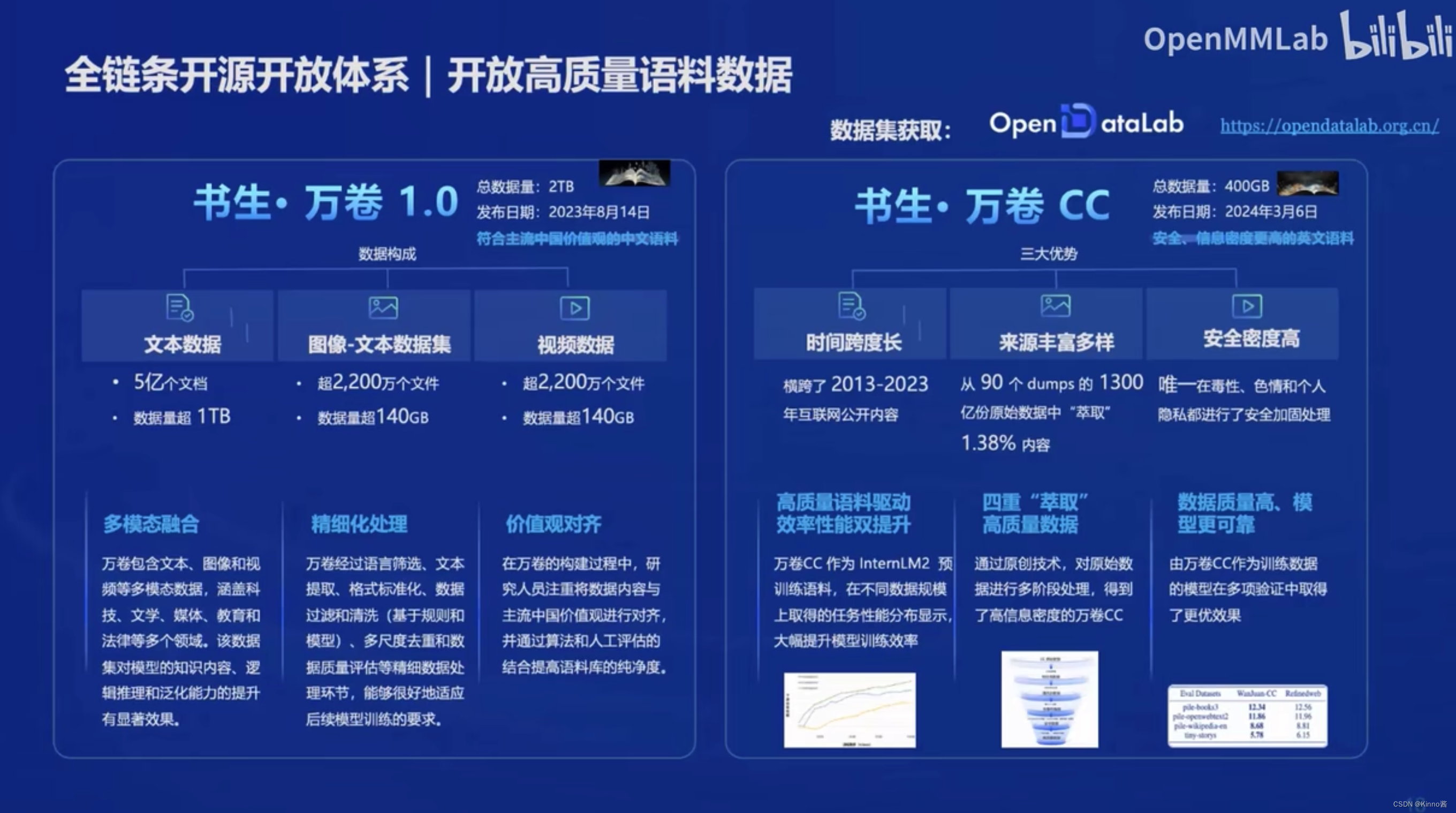
开放高质量语料数据
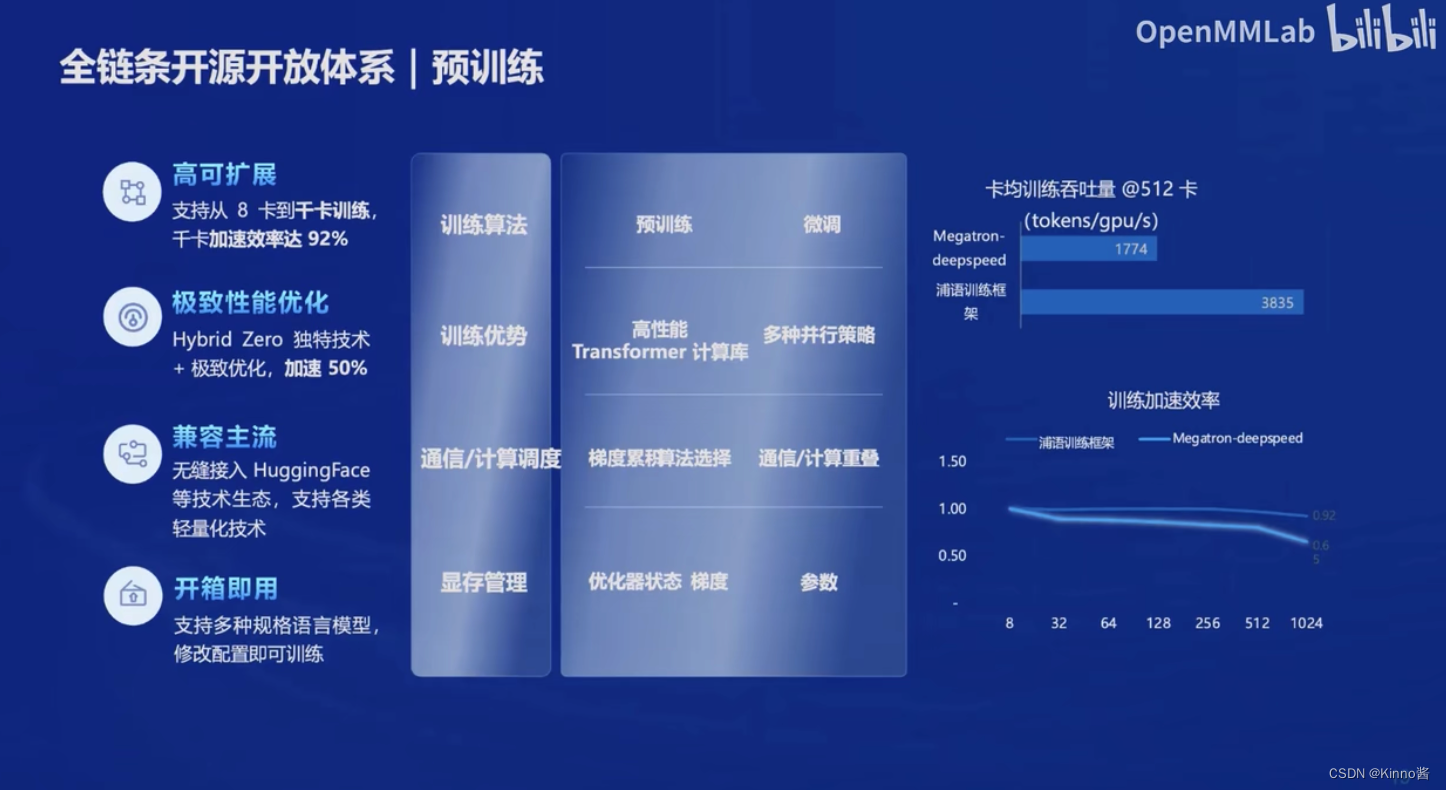
预训练
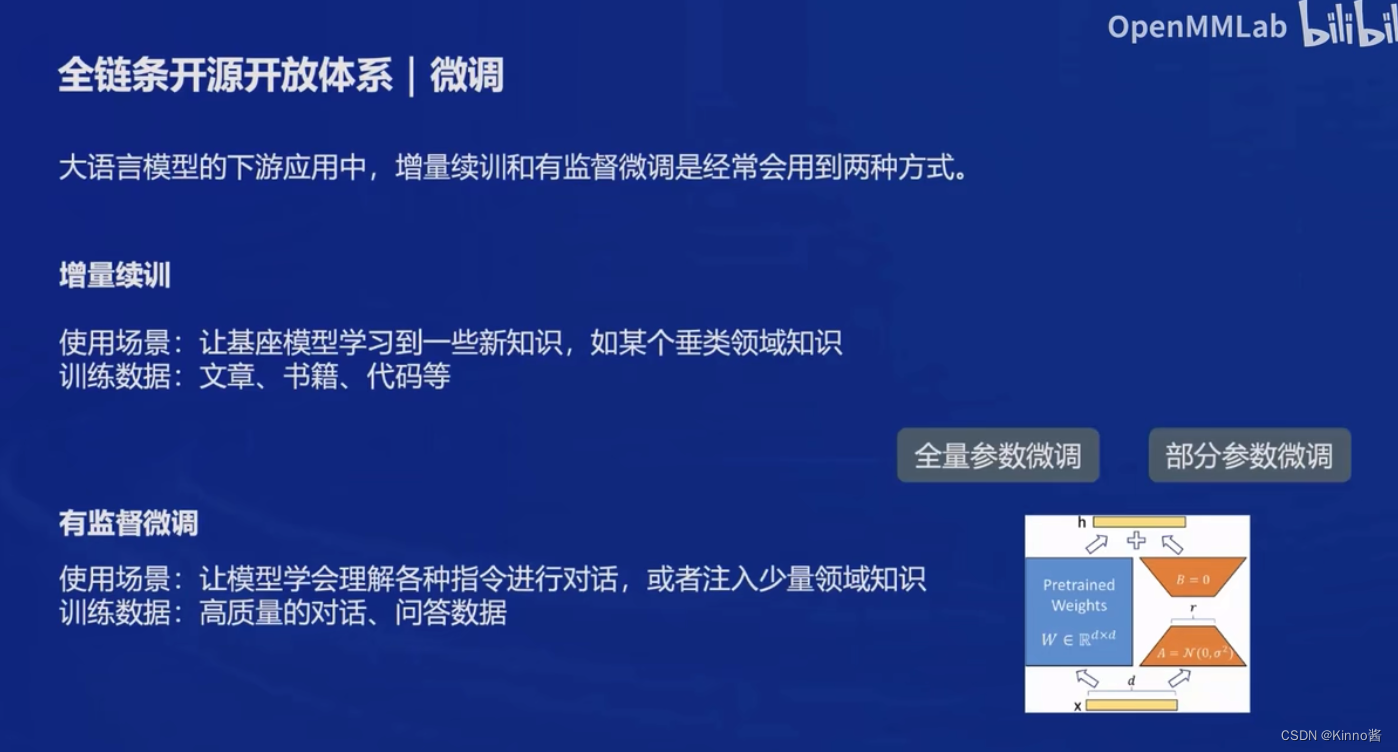
微调

中立全面性能榜单

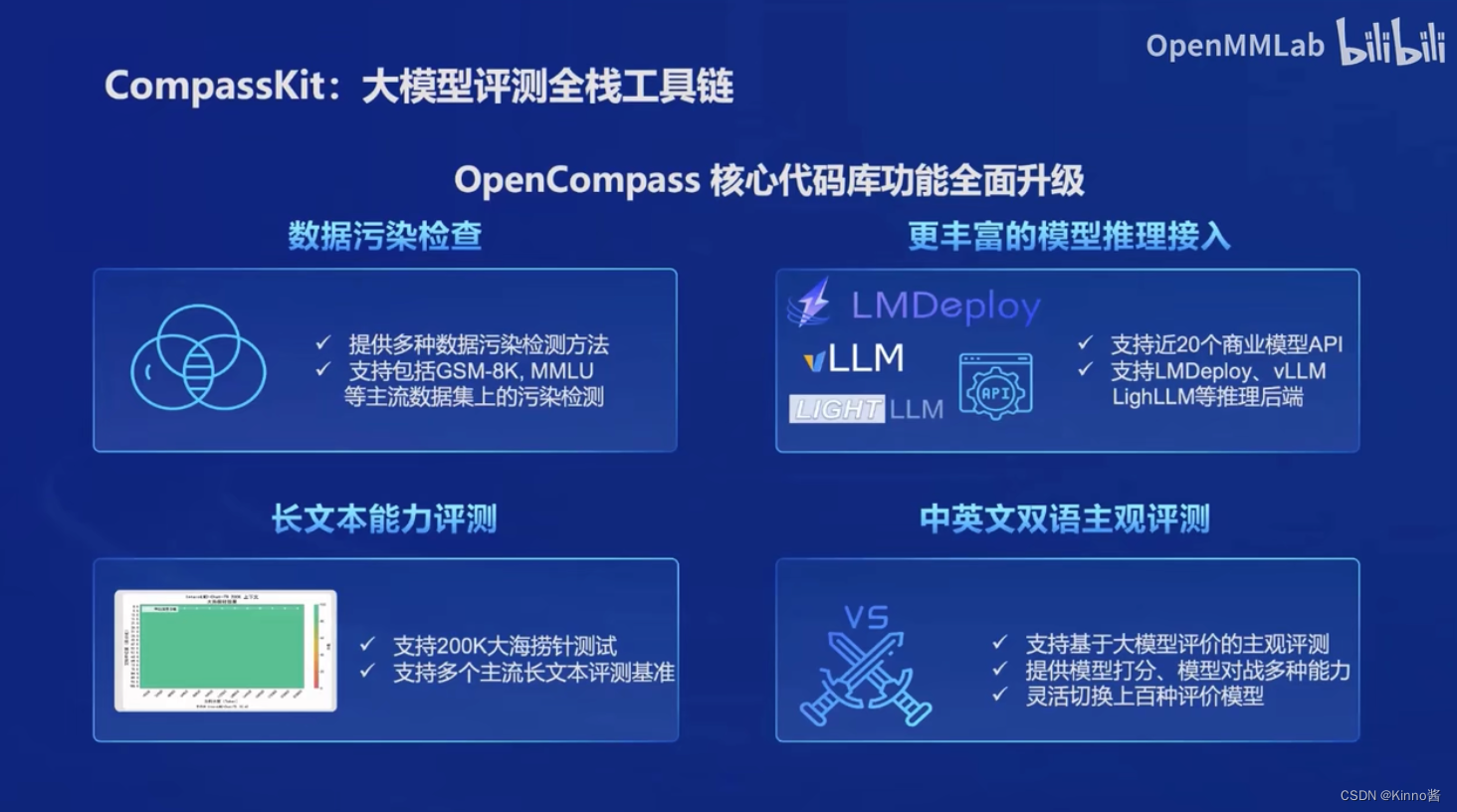
大模型评测全栈工具链
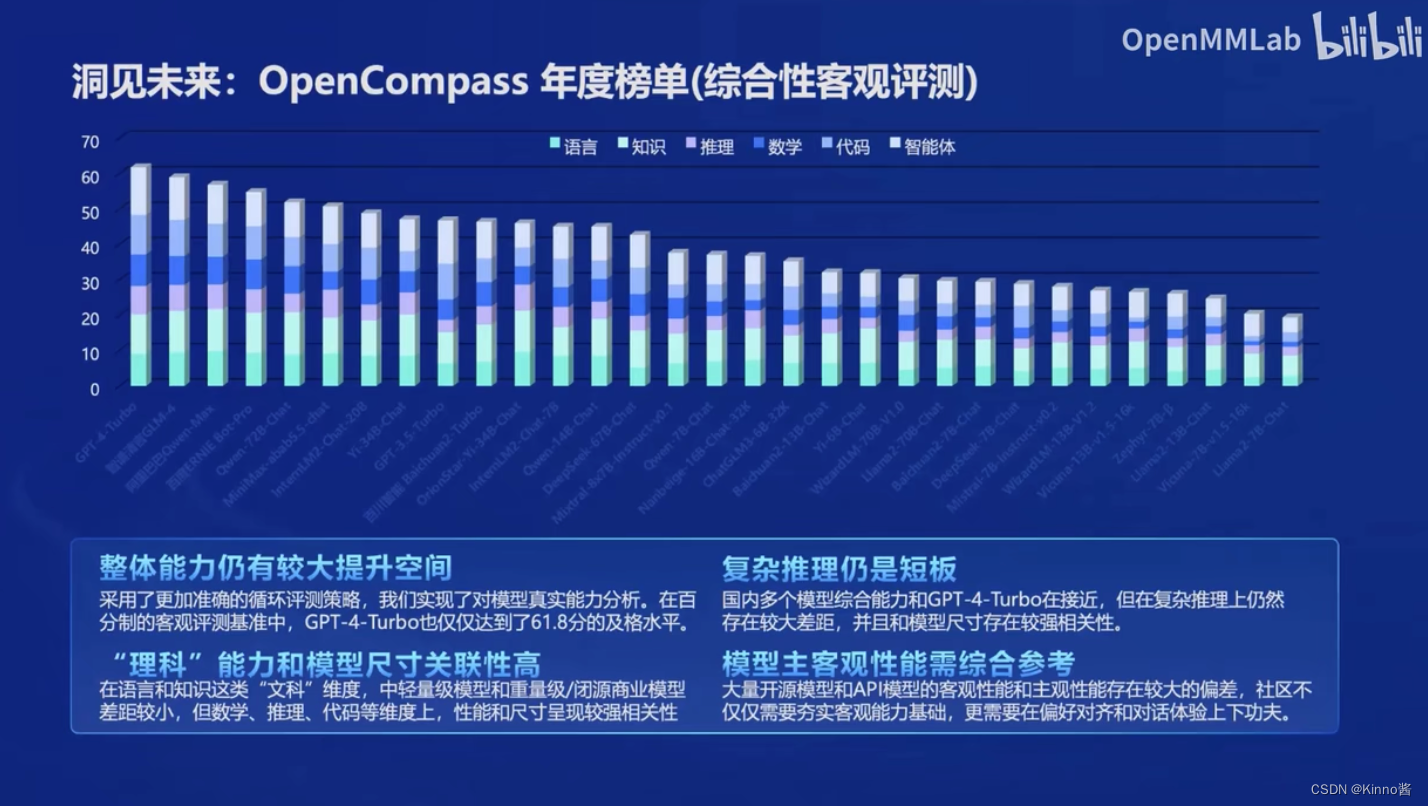
加入循环评测策略,先前的评测方案是做多选题,模型可能存在猜测的因素。而循环评测是对选项进行轮换,只有在能够答对所有轮换的选项后才能说明它的回答是正确的。
部署