小白花了两天时间学习了一下K210,将在线训练的模型部署在K210(代码后面给出)上,能够识别卡皮巴拉水杯(没错,卡皮巴拉,情绪稳定,真的可爱!)。数据集是用K210拍摄的图片存储在SD卡中(拍照采集数据集代码后面会给出),然后传至云端训练。将过程记录作为笔记学习,希望能对大家的学习有所帮助。
本文分为在线训练和部署代码两部分。
在线训练
在线训练进入MaiHub官网(需要注册账号)。

点击开始训练
 如果之前没用过的话,点击新建训练
如果之前没用过的话,点击新建训练
我是检测卡皮巴拉水杯,所以选的图像检测,只是想试试的小伙伴建议跟我选一样,后面给出的代码可以直接运行。
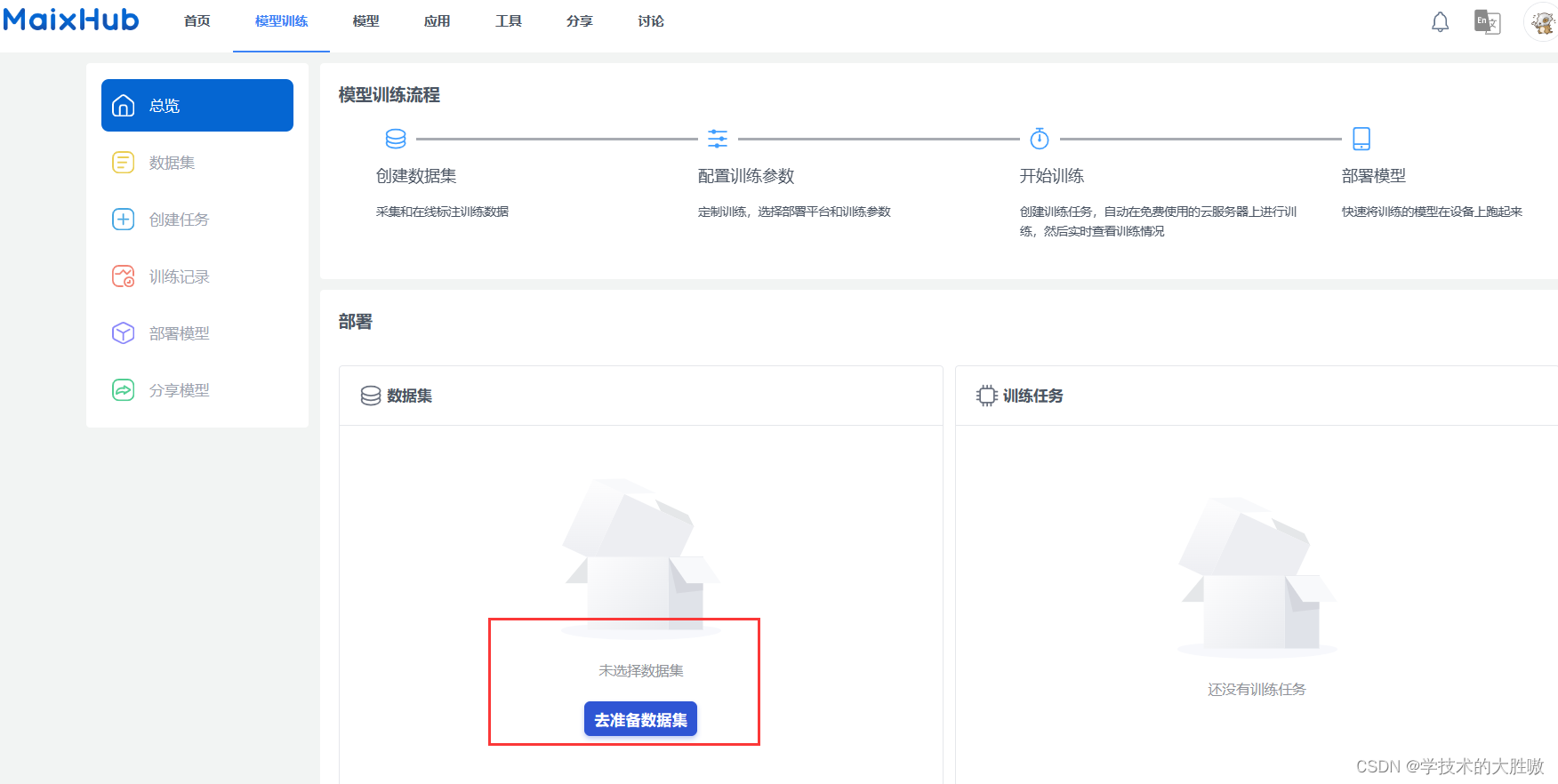
此时点击准备数据集
 没使用过的伙伴直接点击创建数据集就行
没使用过的伙伴直接点击创建数据集就行
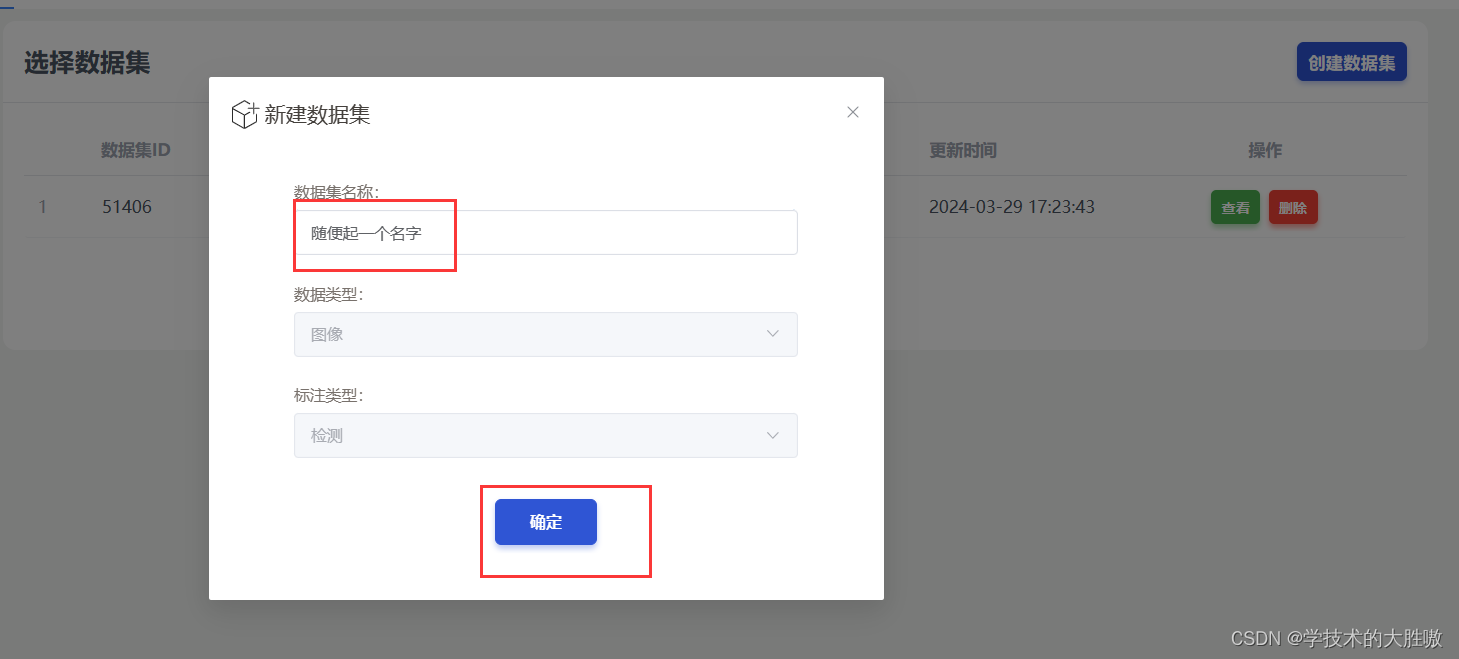
 新建好数据集后会发现多出了新建那个名字,选择该数据集点击确定就行。
新建好数据集后会发现多出了新建那个名字,选择该数据集点击确定就行。
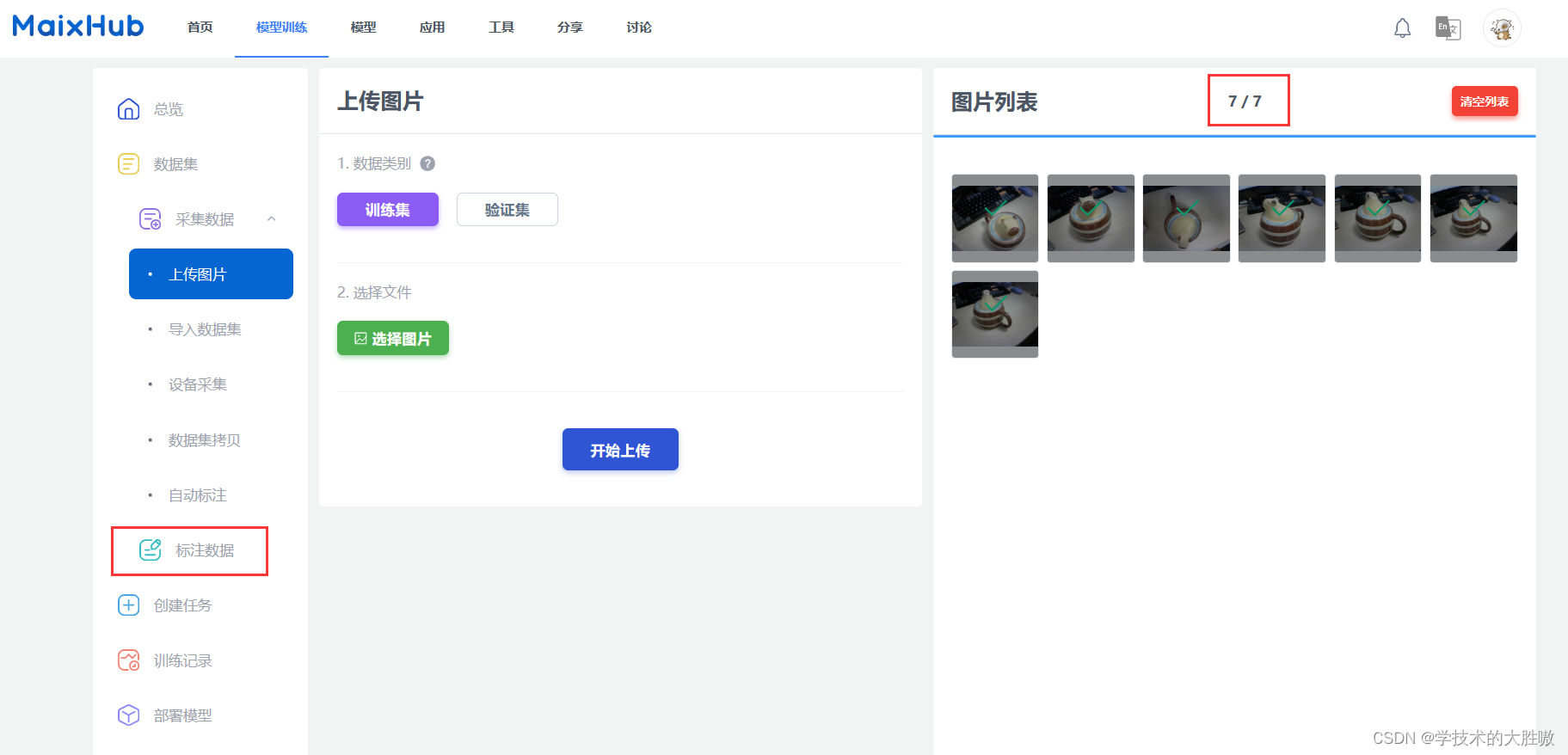
 数据集下面有采集数据和标注数据两个步骤,先点击采集数据。
数据集下面有采集数据和标注数据两个步骤,先点击采集数据。

采集数据下面出现5个选项,我采用的是上传图片,因为是用K210搭配摄像头拍摄的图片。然后点击选择图片,会弹出文件框,将采集的图片全选上传。
这个图片我建议用K210搭配摄像头拍摄采集,因为这样的图片更符合实际摄像头读取的图片。
采集代码如下,每按一次按键就拍摄一张图片:
import sensor, lcd, image
from Maix import GPIO
from fpioa_manager import fm
from machine import UART
import time
# 配置LED蓝、红引脚
fm.register(12, fm.fpioa.GPIO0, force=True)
fm.register(14, fm.fpioa.GPIO1, force=True)
LED_B = GPIO(GPIO.GPIO0, GPIO.OUT, value=1) # 构建LED对象
LED_R = GPIO(GPIO.GPIO1, GPIO.OUT, value=1) # 构建LED对象
# 配置按键引脚
fm.register(16, fm.fpioa.GPIO1)
KEY = GPIO(GPIO.GPIO1, GPIO.IN)
# 摄像头初始化
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.set_vflip(1) # 设置为后置模式
lcd.init() # LCD初始化
# clock = time.clock()
i = 0 # 图像命名索引
while True:
# clock.tick()
img = sensor.snapshot() # 拍摄照片
lcd.display(img) # 实时显示摄像头图像
# print(clock.fps()) #打印 FPS
if KEY.value() == 0: # 按键按下
# 蓝灯亮提示正在拍照
LED_B.value(0)
print(i)
# 拍摄并保存相关文件,按顺序命名
file_name = "/sd/example{}.jpg".format(i)
img.save(file_name)
LED_B.value(1) # 蓝灯灭提示拍照完成
i += 1 # 索引递增
time.sleep(0.5) # 添加短暂延时,防止按键抖动
我拍了131张图片,前121张作为训练集,后10张作为验证集。
图片上传完成之后就标注数据
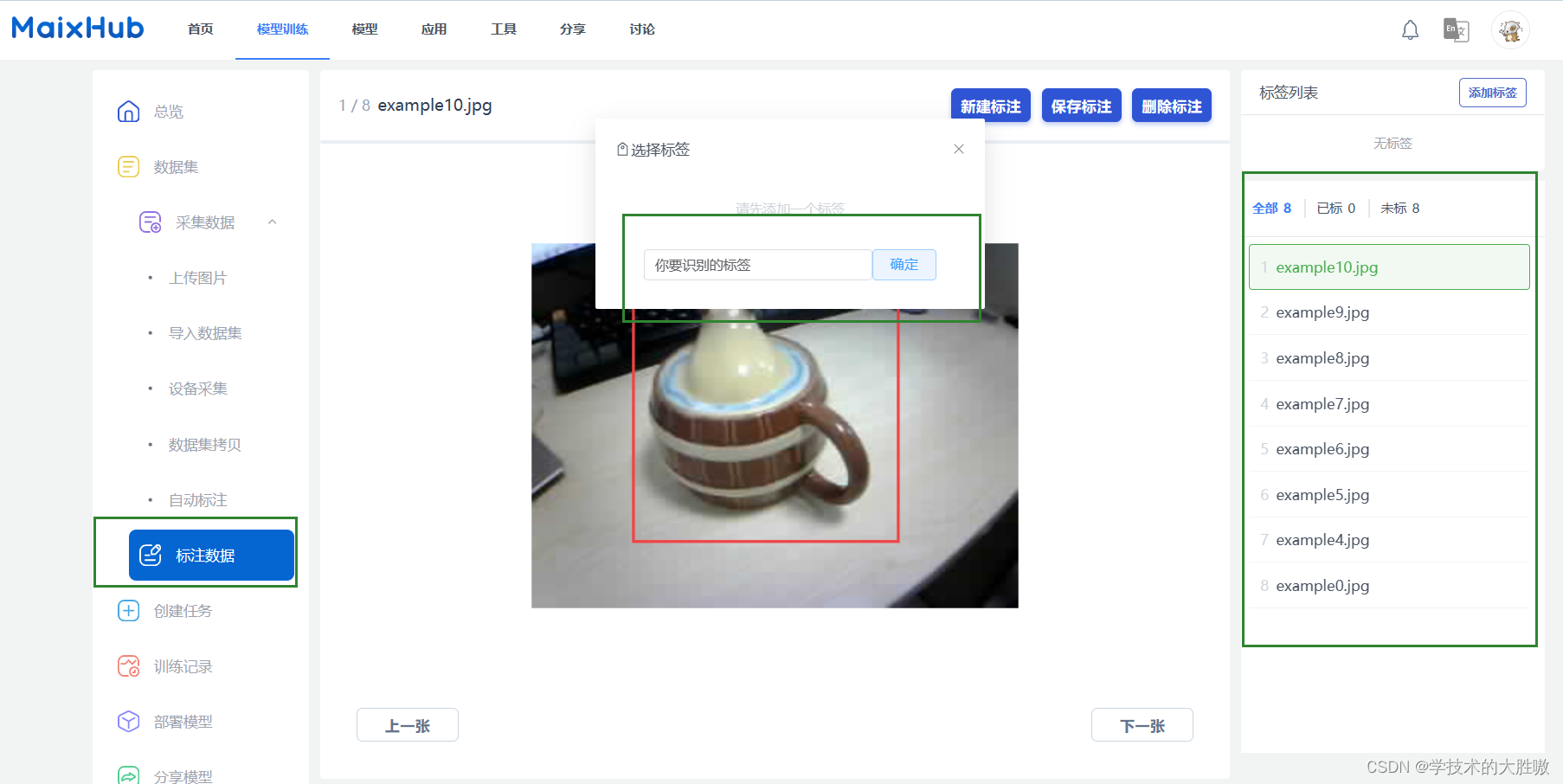 将所有的标签标注完就可以了
将所有的标签标注完就可以了
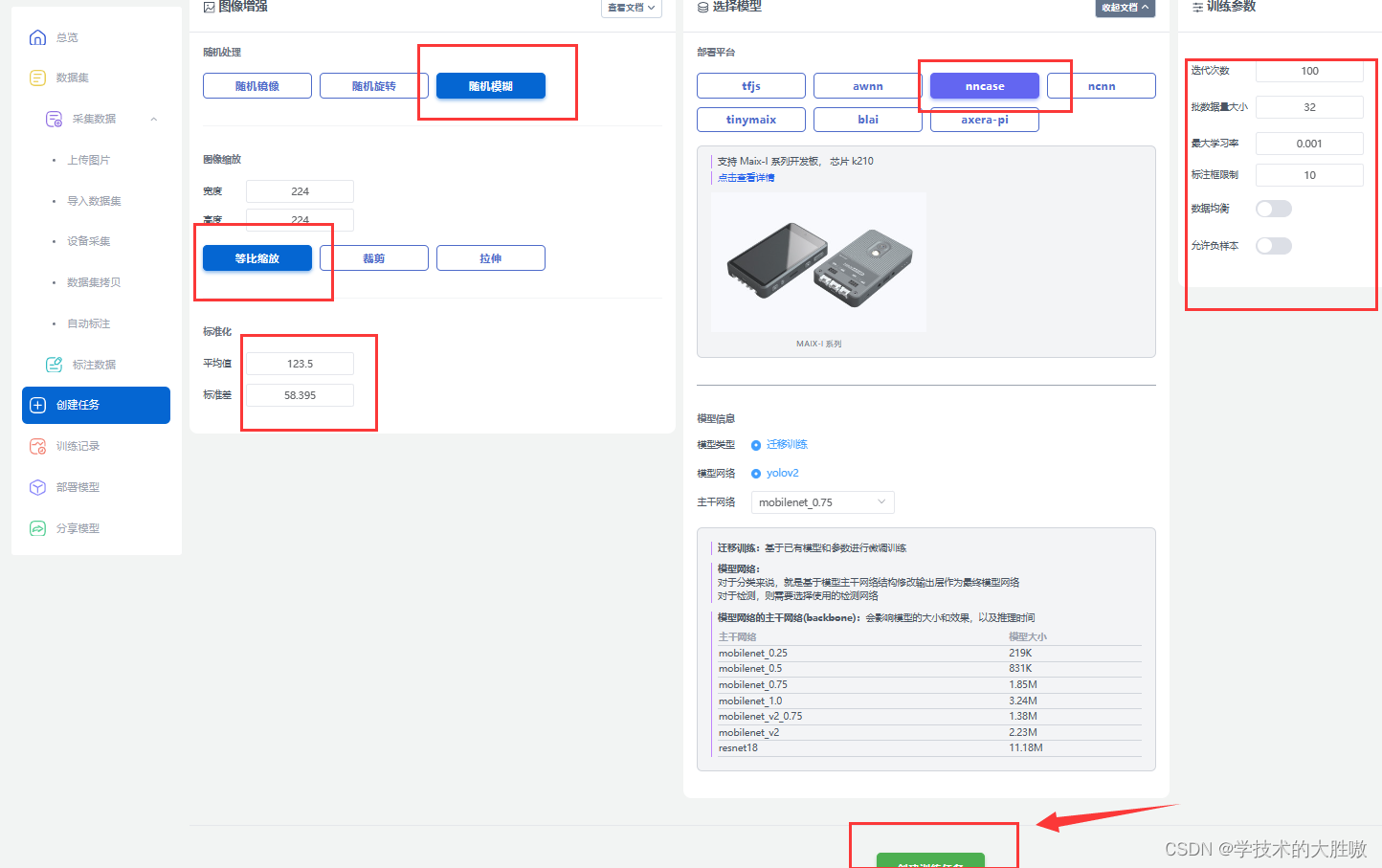
基本上都是默认设置,但我使用的是K210,所以部署平台是nncase,之后创建任务开始训练。

部署代码
训练完成后选择手动部署,会下载一个压缩包。压缩包解压后有3个文件如下:
一开始我是将这三个文件放在SD卡进行运行,后来老是报错运行内存不足,试了很多办法(没错,你们试过的方法我都试过,包括增大GC内存,降低分辨率等等)都没用,就自己写了个调用.kmodel的代码,可以直接运行。代码如下:
import sensor,lcd,time
import KPU as kpu
#设置摄像头
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
input_size = (224, 224)
sensor.set_windowing(input_size)
sensor.set_vflip(1) #设置摄像头后置
# 新添加
input_size = (224, 224)
labels = ['卡皮巴拉']
lcd.init() #LCD初始化
clock = time.clock()
#1、从Flash加载模型。将模型烧录到开发板Flash。烧录方法参考pdf教程。
#task = kpu.load(0x300000)
#2、从SD加载模型卡上。将kmodel文件通过读卡器拷贝到SD卡。
# task = kpu.load("/sd/facedetect.kmodel")
task = kpu.load("/sd/model-110097.kmodel")
#模型描参数
# anchor = (1.889, 2.5245, 2.9465, 3.94056, 3.99987, 5.3658, 5.155437, 6.92275, 6.718375, 9.01025)
anchor = [2.69, 3.02, 3.28, 2.98, 4.56, 4.03, 2.0, 1.72, 3.72, 3.66]
#初始化yolo2网络
a = kpu.init_yolo2(task, 0.5, 0.3, 5, anchor)
while(True):
clock.tick()
img = sensor.snapshot()
code = kpu.run_yolo2(task, img) #运行yolo2网络
#识别到卡皮巴拉就画矩形表示
if code:
for i in code:
print(i)
#b = img.draw_rectangle(i.rect())
pos = i.rect()
img.draw_rectangle(pos)
img.draw_string(pos[0], pos[1] + pos[3] + 5, "ka pi ba la", scale=2, color=(255, 0, 0)) # 在方框下方显示标签名字
img.draw_string(pos[0], pos[1], "%.2f" %(i.value()), scale=2, color=(255, 0, 0), mono_space = False)
#LCD显示
lcd.display(img)
print(clock.fps()) #打印FPS
代码很简单,不懂的地方可以评论交流。
运行效果如下: