基于STC12C5A60S2系列1T 8051单片机通过单个按键单击次数实现开关机应用
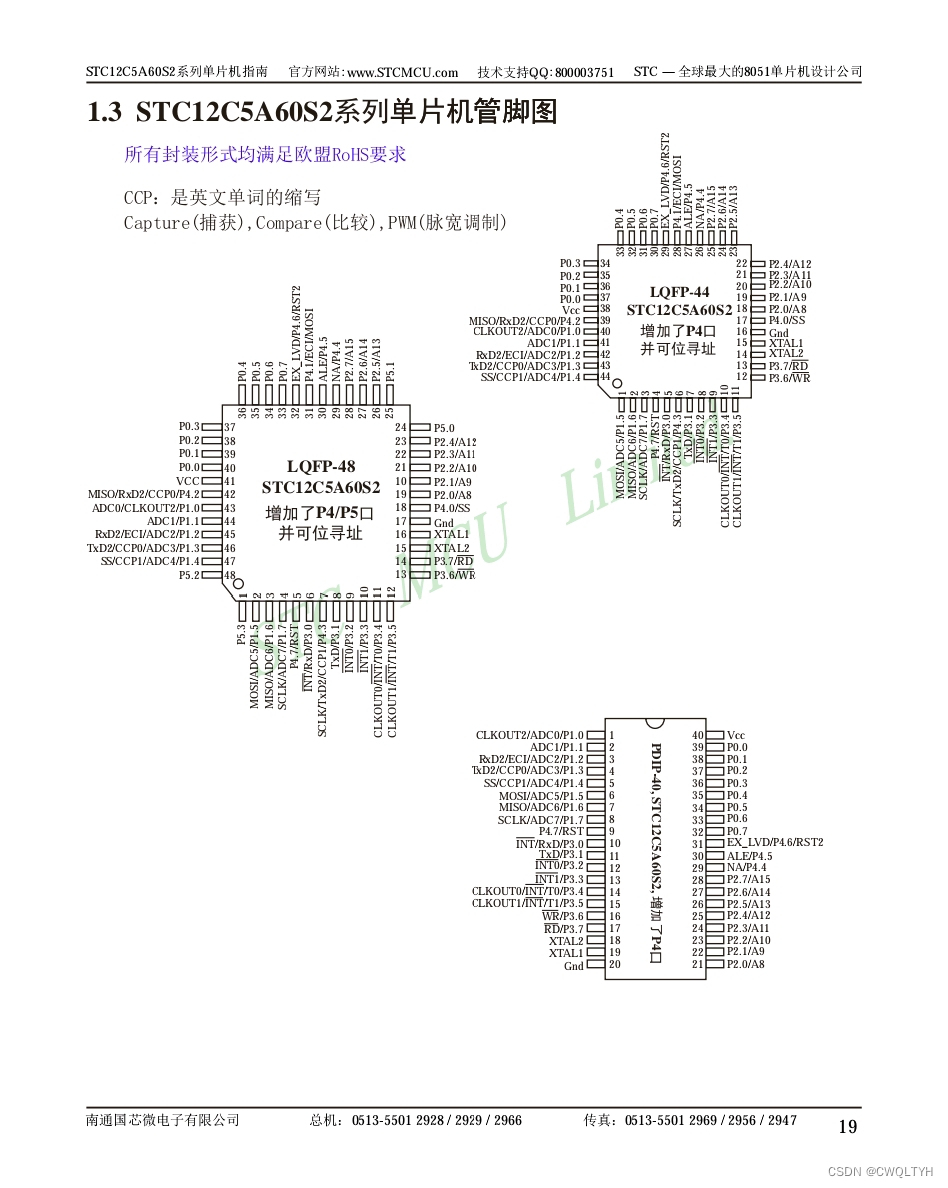
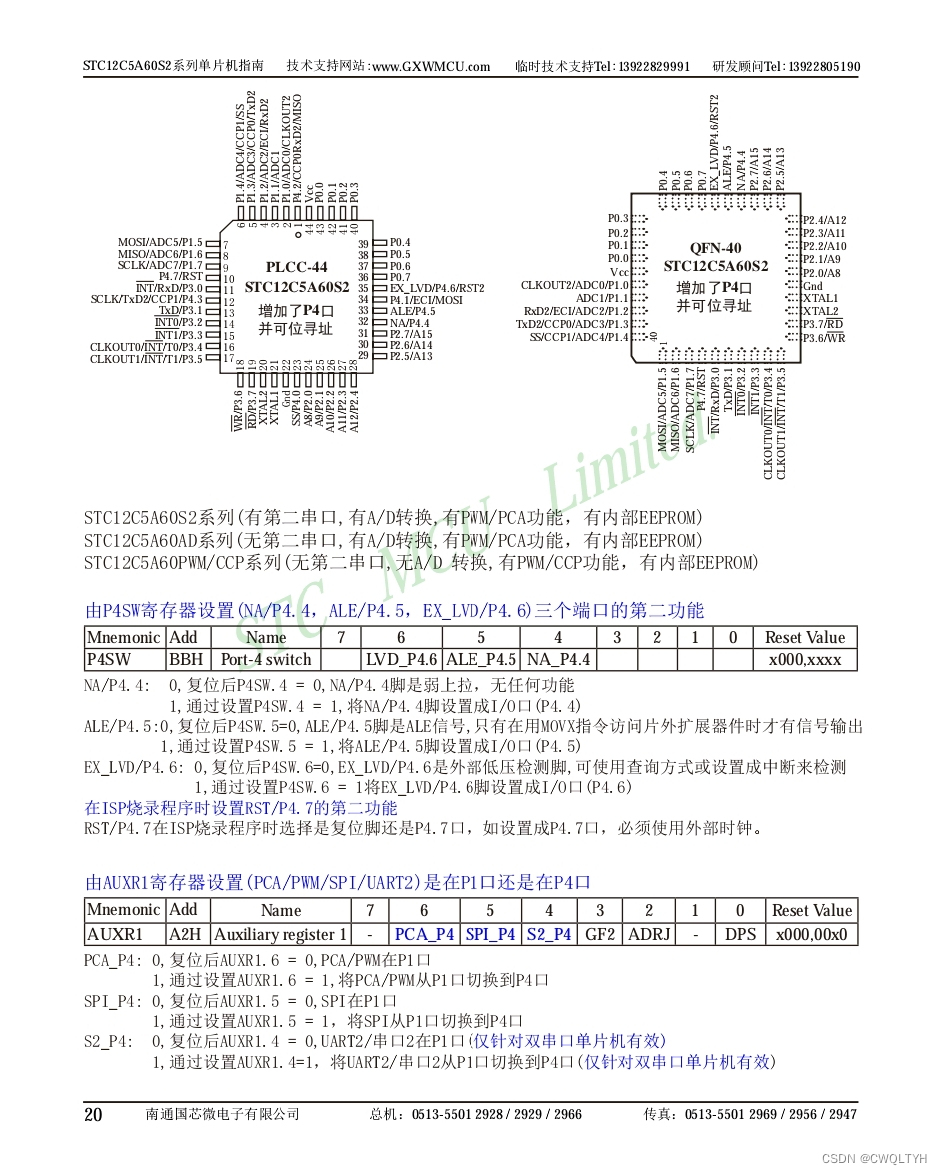
- STC12C5A60S2系列1T 8051单片机管脚图
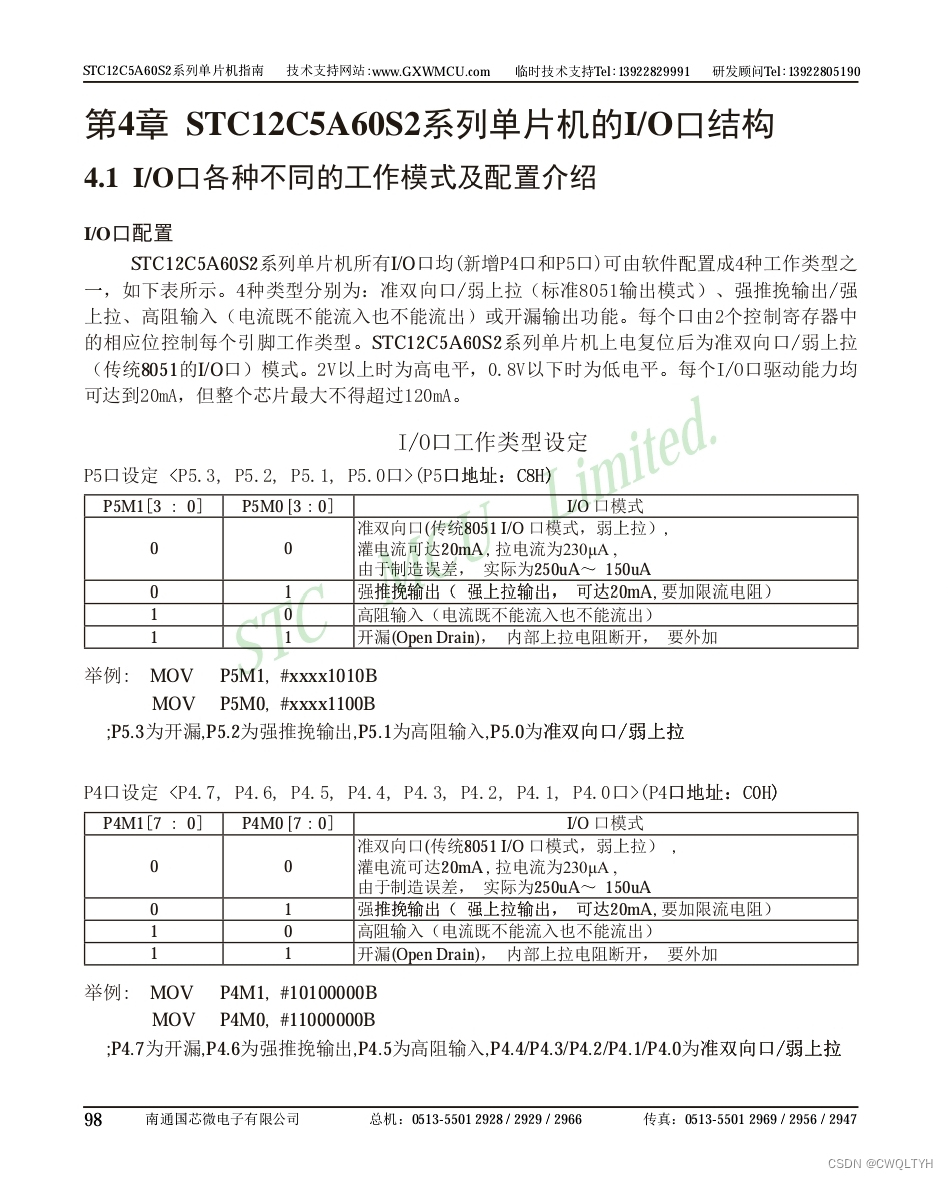
- STC12C5A60S2系列1T 8051单片机I/O口各种不同工作模式及配置
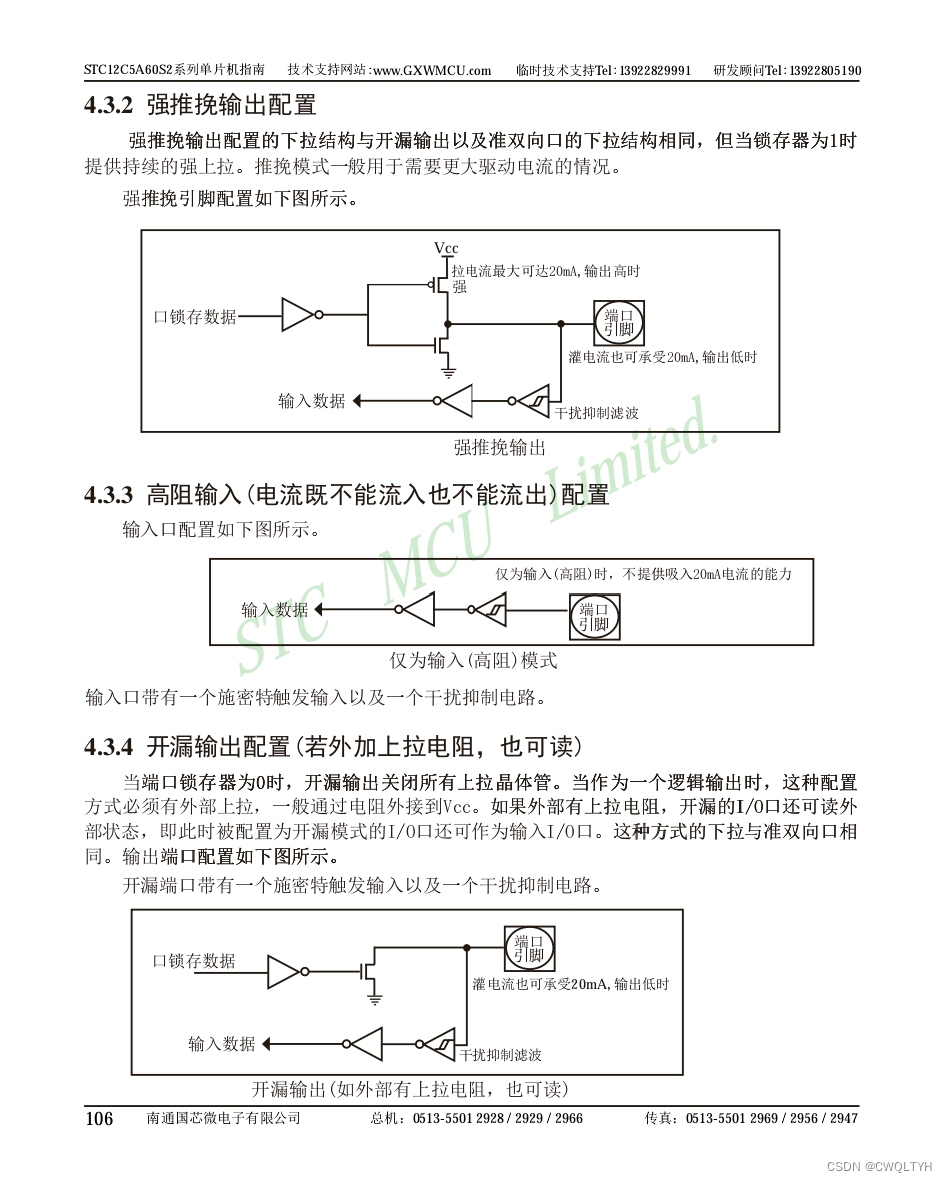
- STC12C5A60S2系列1T 8051单片机I/O口各种不同工作模式介绍
- 基于STC12C5A60S2系列1T 8051单片机通过单个按键单击次数实现开关机功能
STC12C5A60S2系列1T 8051单片机管脚图
STC12C5A60S2系列1T 8051单片机I/O口各种不同工作模式及配置
STC12C5A60S2系列1T 8051单片机I/O口各种不同工作模式介绍

基于STC12C5A60S2系列1T 8051单片机通过单个按键单击次数实现开关机功能
main.c
#include "STC12C5A60S2.h"
#include "Timer0.h"
#include "Key.h"
#include "Digitron.h"
sbit LED = P1^2;//位定义LED灯为单片机P1.2脚
void main()//主函数
{
Timer0Init();//定时器0的16位定时模式1用12分频定时2ms初始化函数 晶振为12MHz
DigitronBootDisplay();//数码管开机显示函数
while(1)//主循环
{
KeyScanResult();//按键扫描结果函数
}
}
Key.c
#include "Key.h"
#include "Timer0.h"
#define uchar unsigned char //定义无符号字符
#define uint unsigned int //定义无符号整形
#define KeyPressDeshakeTime 15//自定义按键按下消抖时间为20ms
#define KeyLongPressDelayTime 100//自定义按键长按延时时间为200ms
uchar KeyTypePressCount = 0;//定义按键类型按下计数变量为0
//uchar KeyTypePressCountFlag = 0;//定义按键类型按下计数标志位变量为0
//uchar ClearKeyPressFlag = 0;//定义清零按键按下标志位变量为0
//uchar SetKeyFlag = 0;//定义设置按键标志位变量为0
//uchar SetKeyPressCountFlag = 1;//定义设置按键按下计数标志位变量为1
uchar SetKeyShortPressLcokFlag = 0;//定义设置按键短按按下锁定标志位变量为0
//uchar SetKeyShortPressCount = 0;//定义设置按键短按按下计数变量为0
//uchar SetKeyShortPressFlag = 0;//定义设置按键短按按下标志位变量为0
//uchar SetKeyShortPressCountFlag = 1;//定义设置按键短按按下计数标志位变量为1
uchar SetKeyLongPressLcokFlag = 0;//定义设置按键长按按下锁定标志位变量为0
//uchar SetKeyLongPressCount = 0;//定义设置按键长按按下计数变量为0
//uchar SetKeyLongPressFlag = 0;//定义设置按键长按按下标志位变量为0
//uint SetKeyLongPressCountFlag = 1;//定义设置按键长按按下计数标志位变量为0
uint KeyPressDelayTime = 0;//定义按键按下延时时间变量为0
uint KeyLiftDelayTime = 0;//定义按键弹起延时时间变量为0
uint KeyPressNumber = 0;//定义按键按下数值变量为0
uint KeyType = 0;//定义按键类型变量为0
// uint KeyScan ()//带按键返回值的按键扫描函数
void KeyScan ()//按键扫描函数
{
if(SetKey == 0)//设置按键按下
{
KeyPressDelayTime++;//按键按下延时时间变量自加
if(KeyPressDelayTime > KeyPressDeshakeTime)//判断按键按下延时时间变量是否大于按键按下消抖时间
{
KeyPressDelayTime = 0;//按键按下延时时间变量清0
SetKeyShortPressFlag = 1;//设置按键短按按下标志位变量置1
}
}
else//设置按键弹起或没按下
{
KeyPressDelayTime = 0;//按键按下延时时间变量清0 重启下一步按键按下延时操作
KeyLiftDelayTime++;//按键弹起延时时间变量自加
if(KeyLiftDelayTime > KeyPressDeshakeTime)//判断按键弹起延时时间变量是否大于按键按下消抖时间
{
KeyLiftDelayTime = 0;//按键弹起延时时间变量清0 重启下一步按键弹起延时操作
if(SetKeyShortPressFlag == 1)//判断设置按键短按按下标志位变量是否为1 表示设置按键短按按下过
{
SetKeyShortPressFlag = 0;//设置按键短按按下标志位变量置0 为了重启下一步设置按键短按按下操作
KeyType = 1;//此处是设置按键短按 对于按键计数或按键类型触发操作 建议要放在按键弹起后再计数或触发 此处就是
SetKeyShortPressCountFlag++;//设置按键短按按下计数标志位变量自加 对于按键计数或按键类型触发操作 建议要放在按键弹起后再计数或触发 此处就是
}
}
}
if(SetKeyShortPressCountFlag > 1)//判断设置按键短按按下计数标志位变量是否大于1 此处是设置按键第2次短按后松手
{
SetKeyFlag = 0;//设置按键标志位变量清0 触发关机
KeyType = 0;//按键类型清0 为了跳出设置按键短按 让设置按键可以进行下一步短按或再次长按
SetKeyShortPressCountFlag = 0;//设置按键短按按下计数标志位变量清0 让设置按键可以进行下一步短按
}
}
void KeyScanResult()//按键扫描结果函数
{
switch(KeyType)//按键类型筛选位
{
case 1 ://单击或连击增加触发位
// KeyTypePressCountFlag = 1;//按键类型计数标志位变量置1 表示设置按键短按过
// KeyPressNumber++;//按键按下数值自加
if(SetKeyShortPressCountFlag == 1)//判断设置按键短按按下计数标志位变量是否等于1 此处是设置按键第1次短按后松手
{
SetKeyFlag = 1;//设置按键标志位变量置1 触发开机
}
KeyType = 0;//按键类型清0
break;//跳出
// case 2 ://单击或连击减少触发位
// KeyPressNumber--;//按键按下数值自减
// if(KeyPressNumber == 0 | KeyPressNumber == 65535)//如果按键按下数值等于0或65535
// {
// KeyPressNumber = 0;//按键按下数值置0
// }
// KeyType = 0;//按键类型清0
// break;//跳出
// case 3 ://长按触发位
// KeyPressNumber++;//按键按下数值自加
// if(KeyPressNumber > 9999)//如果按键按下数值大于9999
// {
// KeyPressNumber = 0;//按键按下数值清0
// }
// KeyType = 0;//按键类型清0
// break;//跳出
default:break;//跳出
}
}
Key.h
#ifndef _KEY_H
#define _KEY_H
#include "STC12C5A60S2.h"
#define uchar unsigned char //定义无符号字符
#define uint unsigned int //定义无符号整形
//sbit AddKey = P3^5;//增加按键
//sbit DecKey = P3^4;//减少按键
sbit SetKey = P3^3;//设置按键
//sbit ClearKey = P3^2;//复位按键
sbit led0 = P1^5;//短按LED指示灯
sbit led1 = P1^6;//长按LED指示灯
sbit led2 = P1^7;//复位LED指示灯
extern uchar SetKeyFlag;声明设置按键标志位变量
//extern uchar KeyTypePressCount;//声明按键类型按下计数变量
//extern uchar KeyTypePressCountFlag;//声明按键类型按下计数标志位变量
//extern uchar ClearKeyPressFlag;//声明清零按键按下标志位变量
//extern uchar SetKeyFlag;//声明设置按键标志位变量
//extern uchar SetKeyPressCountFlag;//声明设置按键按下计数标志位变量
//extern uchar SetKeyShortPressLcokFlag;//声明设置按键短按按下锁定标志位变量
//extern uchar SetKeyShortPressCount;//声明设置按键短按按下计数变量
extern uchar SetKeyShortPressFlag;//声明设置按键短按按下标志位变量置
extern uchar SetKeyShortPressCountFlag;//声明设置按键短按按下计数标志位变量
//extern uchar SetKeyLongPressCount;//声明设置按键长按按下计数变量
//extern uchar SetKeyLongPressLcokFlag;//声明设置按键长按按下锁定标志位变量
//extern uchar SetKeyLongPressFlag;//声明设置按键长按按下标志位变量
//extern uint SetKeyLongPressCountFlag;//声明设置按键长按按下计数标志位变量
extern uint KeyPressDelayTime;//声明按键按下延时时间变量 可被其他.c文件通过#include "其他.h"引用该变量
extern uint KeyLiftDelayTime;//声明按键弹起延时时间变量
extern uint KeyPressNumber;//声明按键按下数值变量
extern uint KeyType;//声明按键类型变量
void KeyScan ();//按键扫描函数
//extern uint KeyScan ();//带有按键返回值的按键扫描函数
void KeyScanResult();//按键扫描结果函数
//void KeyTypePressCountResult();//按键类型按下计数结果函数
#endif
Digitron.c
#include "Digitron.h"
//#include "Key.h"
#include "Timer0.h"
#define uchar unsigned char//自定义无符号字符型为uchar
#define uint unsigned int//自定义无符号整数型为uint
//uchar code DigitronBitCodeArray[] = {0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};//定义八位共阴数码管位码数组变量 为什么不是{0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f} 这才是定义八位共阴数码管位码数组变量 不对吗? 在不使用NPN三极管驱动 用单片机端口直接连接驱动 位码数组是对的 但数码管亮度不够 因此使用了NPN型三极管(比如S8050)来驱动共阴数码管位选 NPN型三极管(比如S8550)基极输入高电平才能导通 解释:共阴数码管 阴极是公共端 对应位选 低电平选通 阳极是显示端 对应段选 高电平选通 由于共阴数码管阴极公共端接单片机来驱动共阴数码管阳极显示端 共阴数码管的亮度会比较低 需要借助NPN型三极管的集电极连接共阴数码管阴极公共端 而NPN型三极管的基电极串个限流电阻连接单片机端口 通过单片机端口输出高电平到NPN型三极管的基电极 从而导通NPN型三极管 放大流过共阴数码管的电流 这样共阴数码管的亮度才会比较亮
//uchar code DigitronSegmentCodeArray[] = {0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71,0x40,0x00};//定义共阴数码管显示0到F数据及符号“—”及熄灭数组变量
//uchar code DigitronSegmentCodeOfPointArray[] = {0xbf,0x86,0xdb,0xcf,0xe6,0xed,0xfd,0x87,0xff,0xef,0xf7,0xfc,0xb9,0xde,0xf9,0xf1,0x40,0x00};//定义带小数点共阴数码管显示0.到F.数据及符号“—”及熄灭数组变量
uchar code DigitronBitCodeArray[] = {0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};//定义八位共阳数码管位码数组变量 为什么不是{0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80} 这才是定义八位共阳数码管位码数组变量 不对吗? 在不使用PNP三极管驱动 用单片机端口直接连接驱动 位码数组是对的 但数码管亮度不够 因此使用了PNP型三极管(比如S8550)来驱动共阳数码管位选 PNP型三极管(比如S8550)基极输入低电平才能导通 解释:共阳数码管 阳极是公共端 对应位选 高电平选通 阴极是显示端 对应段选 低电平选通 由于共阳数码管阳极公共端接单片机来驱动共阳数码管阴极显示端 共阳数码管的亮度会比较低 需要借助PNP型三极管的集电极连接共阳数码管阳极公共端 而PNP型三极管的基电极串个限流电阻连接单片机端口 通过单片机端口输出低电平到PNP型三极管的基电极 从而导通PNP型三极管 由外接电源来驱动共阳数码管 这样共阳数码管的亮度才会比较亮
uchar code DigitronSegmentCodeArray[] = {0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e,0xbf,0xff};//定义共阳数码管显示0到F数据及符号“—”及熄灭数组变量
//uchar code DigitronSegmentCodeOfPointArray[] = {0x40,0x79,0x24,0x30,0x19,0x12,0x02,0x78,0x00,0x10,0x08,0x03,0x46,0x21,0x06,0x0e,0xbf,0xff};//定义带小数点共阳数码管显示0.到F.数据及符号“—”及熄灭数组变量
uchar DigitronCacheDataArray[] = {0,0,0,0};//定义共阳数码管缓存数据数组变量
uchar DigitronBootTimerFlag = 1;//定义共阳数码管开机时间标志位变量
uint DigitronBootTimer = 0;//定义数码管开机时间变量
//extern uchar Data;//取用外部定义的数据变量
//extern uint KeyPressNumber;//如果在Key.c文件下已经定义按键按下数值变量KeyPressNumber 则以此语句来引用Key.c文件下的按键按下数值变量KeyPressNumber 否则先在Key.c文件下定义按键按下数值变量KeyPressNumber 接着在Key.h文件下的用extern关键字声明按键按下数值变量KeyPressNumber 最后通过在其他.c文件下#include "Key.h" 就可以引用在Key.c文件下已经定义的按键按下数值变量KeyPressNumber
void DigitronBootDisplay()//数码管开机显示函数
{
do
{
//if(DigitronBootTimer == 500 )//如果数码管开机时间等于1s
LED0 = ~ LED0;//LED灯亮灭更新
}while(DigitronBootTimer <= 500);//当数码管开机时间小于5s
DigitronBootTimerFlag = 0;//数码管开机时间标志位清0
LED0 = 1;//LED灯熄灭
}
void DigitronDisplayDataSplit()//数码管显示数据分解函数
{
DigitronCacheDataArray[0] = KeyPressNumber / 1000;//数码管千位数据显示
DigitronCacheDataArray[1] = KeyPressNumber / 100 % 10;//数码管百位数据显示
DigitronCacheDataArray[2] = KeyPressNumber / 10 % 10;//数码管十位数据显示
DigitronCacheDataArray[3] = KeyPressNumber % 10;//数码管个位数据显示
// DigitronCacheDataArray[0] = Data / 1000;//数码管千位数据显示
// DigitronCacheDataArray[1] = Data / 100 % 10;//数码管百位数据显示
// DigitronCacheDataArray[2] = Data / 10 % 10;//数码管十位数据显示
// DigitronCacheDataArray[3] = Data % 10;//数码管个位数据显示
if(KeyPressNumber < 1000)//如果累积时间变量小于1000
{
DigitronCacheDataArray[0] = 17;//数码管千位数据不显示
}
else
{
DigitronCacheDataArray[0] = KeyPressNumber / 1000;//数码管千位数据显示
}
if(KeyPressNumber < 100)//如果累积时间变量小于100
{
DigitronCacheDataArray[1] = 17;//数码管百位数据不显示
}
else
{
DigitronCacheDataArray[1] = KeyPressNumber / 100 % 10;//数码管百位数据显示
}
if(KeyPressNumber < 10)//如果累积时间变量小于10
{
DigitronCacheDataArray[2] = 17;//数码管十位数据不显示
}
else
{
DigitronCacheDataArray[2] = KeyPressNumber / 10 % 10;//数码管十位数据显示
}
DigitronCacheDataArray[3] = KeyPressNumber % 10;//数码管个位数据显示
}
void DigitronDisplayData()//数码管显示数据函数
{
static uchar i = 0;//定义静态数码管管位变化变量
switch(i)//数码管管位变化筛选
{
case 0 ://数码管千位显示
DigitronSegmentCode = 0xff;//数码管段码消影
DigitronSegmentCode = DigitronSegmentCodeArray[DigitronCacheDataArray[0]];//数码管千位的段码显示
DigitronBitCode = DigitronBitCodeArray[0];//数码管千位码显示
i++;//数码管管位变化自加1
break;//跳出
case 1 ://数码管百位显示
DigitronSegmentCode = 0xff;//数码管段码消影
DigitronSegmentCode = DigitronSegmentCodeArray[DigitronCacheDataArray[1]];//数码管百位的段码显示
DigitronBitCode = DigitronBitCodeArray[1];//数码管百位码显示
i++;//数码管管位变化自加1
break;//跳出
case 2 ://数码管十位显示
DigitronSegmentCode = 0xff;//数码管段码消影
DigitronSegmentCode = DigitronSegmentCodeArray[DigitronCacheDataArray[2]];//数码管十位的段码显示
DigitronBitCode = DigitronBitCodeArray[2];//数码管十位码显示
i++;//数码管管位变化自加1
break;//跳出
case 3 ://数码管个位显示
DigitronSegmentCode = 0xff;//数码管段码消影
DigitronSegmentCode = DigitronSegmentCodeArray[DigitronCacheDataArray[3]];//数码管个位的段码显示
DigitronBitCode = DigitronBitCodeArray[3];//数码管个位码显示
i = 0;//数码管管位变化清0
break;//跳出
default:break;//跳出
}
}
Digitron.h
#ifndef _DIGITRON_H
#define _DIGITRON_H
#include "STC12C5A60S2.h"
#define uchar unsigned char//自定义无符号字符型为uchar
#define uint unsigned int//自定义无符号整数型为uint
#define DigitronSegmentCode P0//自定义共阳数码管段码端口为单片机P0组引脚
#define DigitronBitCode P2//自定义共阳数码管位码端口为单片机P2组引脚
sbit LED0 = P1^0;//位定义LED灯为单片机P1.0脚
extern uchar code DigitronBitCodeArray[];//声明八位共阳数码管位码数组变量 可被其他.c文件通过#include "其他.h"引用该变量
extern uchar code DigitronSegmentCodeArray[];//声明共阳数码管显示0到F数据及符号“—”及熄灭数组变量 可被其他.c文件通过#include "其他.h"引用该变量
extern uchar DigitronCacheDataArray[];//声明共阳数码管缓存数据数组变量 可被其他.c文件通过#include "其他.h"引用该变量
extern uchar DigitronBootTimerFlag;//声明共阳数码管开机时间标志位变量 可被其他.c文件通过#include "其他.h"引用该变量
extern uint DigitronBootTimer;//声明数码管开机时间变量 可被其他.c文件通过#include "其他.h"引用该变量
void DigitronBootDisplay();//声明数码管开机显示函数
void DigitronDisplayDataSplit();//声明数码管显示数据分解函数
void DigitronDisplayData();//声明数码管显示数据函数
#endif
Timer0.c
#include "Timer0.h"
#include "Key.h"
#include "Digitron.h"
/*****关于通过特殊功能寄存器AUXR设定定时器/计数器模式为1T或12T模式不需分频或需12分频8051系列单片机定时器初值(定时计数初值)计算的知识点*****/
/****
时钟周期(又称振荡周期):单片机晶振频率的倒数 例:单片机晶振频率12MHz 则时钟周期=[1/(12*10^6)Hz]s=0.000000083s=0.000083ms=0.083us
机器周期:单片机执行一条指令过程中需要完成一个基本操作(如:取指、译码、执行等基本操作)所需的时间 8051系列单片机的一个机器周期由6个S周期(状态周期)组成 一个时钟周期定义为一个节拍(用P表示) 二个节拍定义为一个状态周期(用S表示) 那么8051单片机的机器周期由6个状态周期组成 也就是说一个机器周期=6个状态周期=12个时钟周期=[12x[1/(12*10^6)Hz]s]s=0.000001s=0.001ms=1us
指令周期:单片机取出一条指令且执行完这条指令所需的时间
以上三者间的关系:指令周期>机器周期>时钟周期
一、以下是8051单片机定时器用12分频计算定时器初值的一种计算公式(以单片机晶振频率为12MHz 定时器0工作模式为16位定时模式1 需要定时1ms来计算):
0、计算nT单片机机器周期T公式:T=n*(1/晶振频率)=几us
1、一个机器周期=12个时钟周期=12乘以单片机晶振频率的倒数=12*[1/(12*10^6)Hz]s=0.000001s=0.001ms=1us
2、定时时间=定时计数*一个机器周期 1ms=定时计数*1us 定时计数=1ms/1us=1000us/1us=1000次
3、定时器初值(定时计数初值)=2^n-定时计数 n为几位定时器 此处n=16 则定时器初值(定时计数初值)=2^16-1000=65536-1000=64536 把64536转化成十六进制 拆开成高八位和低八位 高八位放TH0=0xfc或(65536-64536)/256 低八位放TL0=0x18或(65536-64536)%256
二、以下是8051单片机定时器用12分频或不分频计算定时器初值的另外一种计算公式(以单片机晶振频率为12MHz 定时器0工作模式为16位定时模式1 需要定时1ms来计算):
1、综合公式:定时器初值(定时计数初值)=2^n-(晶振频率/几分频/定时频率) n为几位定时器 该公式常用于脉冲宽度调制中运算 例如:利用8051系列单片机晶振频率为12MHz的定时器0的16位定时模式1来产生1KHz方波脉冲 由此可知:定时时间=1/定时频率=1/1000Hz=0.001s=1ms=1000us 进而可得:定时器初值(定时计数初值)=2^n-(晶振频率/几分频/定时频率)=2^16-(12MHz/12/1KHz)=2^16-(12*10^6)Hz/12/1000Hz)=65536-1000=64536 把64536转化成十六进制 拆开成高八位和低八位 高八位放TH0=0xfc或(65536-64536)/256或Value >> 8 低八位放TL0=0x18或(65536-64536)%256或=Value
2、TH0 = Value >> 8;TL0 = Value;该两句代码解释如下:
(1)、TH0 = Value >> 8相当于TH0 = (65536-10000)/256=55536/256=216.9375 分析:65536-10000=55536转化成二进制为11011000 11110000 55536/256=216.9375转化成二进制为11011000 由此可看出Value为(65536-10000)=55536的二进制数11011000 11110000右移8位就可以得到55536/256=216.9375的二进制数11011000
(2)、TL0 = Value相当于TL0 = (65536-时器初值的另外一种计算公式(以单片机晶振频率为12MHz 定时器0工作模式为16位定时模式1 需要定时1ms来计算):
(一)、以下是8051单片机定时器用12分频计算定时器初值:
定时器初值(定时计数初值)=2^n-(晶振频率/几分频/定时频率) n为几位定时器 该公式常用于脉冲宽度调制中运算 例如:利用8051系列单片机晶振频率为12MHz的定时器0的16位定时模式1来产生1KHz方波脉冲(相当于定时1ms) 由此可知:定时时间=1/定时频率=1/1000Hz=0.001s=1ms=1000us 进而可得:定时器初值(定时计数初值)=2^n-(晶振频率/几分频/定时频率)=2^16-(12MHz/12/1KHz)=2^16-(12*10^6)Hz/12/1000Hz)=65536-1000=64536 把64536转化成十六进制 拆开成高八位和低八位 高八位放TH0=0xfc或(65536-64536)/256或Value >> 8 低八位放TL0=0x18或(65536-64536)%256或=Value
(二)、以下是8051单片机定时器不用分频计算定时器初值:
定时器初值(定时计数初值)=2^n-(晶振频率/几分频/定时频率) n为几位定时器 该公式常用于脉冲宽度调制中运算 例如:利用8051系列单片机晶振频率为12MHz的定时器0的16位定时模式1来产生1KHz方波脉冲(相当于定时1ms) 由此可知:定时时间=1/定时频率=1/1000Hz=0.001s=1ms=1000us 进而可得:定时器初值(定时计数初值)=2^n-(晶振频率/几分频/定时频率)=2^16-(12MHz/1/1KHz)=2^16-(12*10^6)Hz/1/1000Hz)=65536-12000=53536 把53536转化成十六进制 拆开成高八位和低八位 高八位放TH0=0xd1或(65536-53536)/256或Value >> 8 低八位放TL0=0x20或(65536-53536)%256或=Value
(三)、TH0 = Value >> 8;TL0 = Value;该两句代码解释如下:
1、TH0 = Value >> 8相当于TH0 = (65536-10000)/256=55536/256=216.9375 分析:65536-10000=55536转化成二进制为11011000 11110000 55536/256=216.9375转化成二进制为11011000 由此可看出Value为(65536-10000)=55536的二进制数11011000 11110000右移8位就可以得到55536/256=216.9375的二进制数11011000
2、TL0 = Value相当于TL0 = (65536-10000)%256=55536%256=240 分析:65536-10000=55536转化成二进制为11011000 11110000 55536%256=240转化成二进制为11110000 由此可看出Value为(65536-10000)=55536的二进制数11011000 11110000取低8位就可以得到55536%256=240的二进制数11110000
(四)、由定时器定时初值(定时计数初值)推导出定时器定时时间步骤如下:
1、如果定时器定时初值(定时计数初值)是拆开成高八位和低八位赋值形式 如:TH0=0xfc TL0=0x18 先把高八位和低八位赋值组成一个十六位数据0xfc18 转化成十进制数据64536 用2^n-64536算出每秒产生的脉冲数 其中n为几位定时器 再根据公式计算定时时间 如:由公式:每秒产生的脉冲数=晶振频率/几分频/定时频率 转换成:每秒产生的脉冲数=晶振频率x定时频率/几分频 可求:定时频率=(每秒产生的脉冲数x几分频)/晶振频率 进而求出:定时时间=1/定时频率=1/[(每秒产生的脉冲数x几分频)/晶振频率] 转换成:晶振频率/(每秒产生的脉冲数x几分频)=定时时间
2、如果定时器定时初值(定时计数初值)是十进制数据 如:64536 直接用2^n-64536算出每秒产生的脉冲数 其中n为几位定时器 再根据公式计算定时时间 如:由公式:每秒产生的脉冲数=晶振频率/几分频/定时频率 转换成:每秒产生的脉冲数=晶振频率x定时频率/几分频 可求:定时频率=(每秒产生的脉冲数x几分频)/晶振频率 进而求出:定时时间=1/定时频率=1/[(每秒产生的脉冲数x几分频)/晶振频率] 转换成:晶振频率/(每秒产生的脉冲数x几分频)=定时时间
****/
#define uchar unsigned char//自定义无符号字符型为uchar
#define uint unsigned int//自定义无符号整数型为uint
void Timer0Init()//定时器0的16位定时模式1用12分频定时2ms初始化函数 晶振为12MHz
{
//AUXR &= 0x7f;//设定定时器/计数器模式为12T
TMOD &= 0xf0;//设定定时器/计数器工作模式清0
TMOD |= 0x01;//设定定时器/计数器为定时器 工作模式为16位定时器0模式1
TH0 = 0xf8;//设定定时器0高8位初值
TL0 = 0x30;//设定定时器0低8位初值
TF0 = 0;//定时器0溢出中断标志位清0
ET0 = 1;//打开定时器0中断开关
EA = 1;//打开定时器中断总开关
TR0 = 1;//打开定时器0开关
}
void Timer0() interrupt 1//定时器0的16位定时模式1用12分频定时2ms中断函数 晶振为12MHz
{
TR0 = 0;//关定时器0开关
if(DigitronBootTimerFlag == 1)//数码管开机时间标志位置1
{
DigitronBootTimer++;//数码管开机时间自加
}
if(DigitronBootTimerFlag == 0)//判断共阳数码管开机时间标志位是否等于0
{
if(SetKeyFlag == 1)//开关机触发位 1是开机 0是关机
{
DigitronDisplayDataSplit();//数码管显示数据分解函数
DigitronDisplayData();//数码管显示数据函数
}
// SetKeyScan();//设置按键扫描函数 该函数放在定时器定时2ms的中断函数中扫描
KeyScan();//按键扫描函数 该函数放在定时器定时2ms的中断函数中扫描
}
TH0 = 0xf8;//设定定时器0计数高8位初值
TL0 = 0x30;//设定定时器0计数低8位初值
TR0 = 1;//开定时器0开关
}
Timer0.h
#ifndef _TIMER0_H
#define _TIMER0_H
#include "STC12C5A60S2.h"
#define uchar unsigned char//自定义无符号字符型为uchar
#define uint unsigned int//自定义无符号整数型为uint
void Timer0Init();//声明定时器0初始化函数
#endif