这里写目录标题
- 一、开启任务调度器(熟悉)
- 二、启动第一个任务(熟悉)
- 2.1,prvStartFirstTask () /* 开启第一个任务 */
- 2.2,vPortSVCHandler () /* SVC中断服务函数 */
- 三、任务切换(掌握)
一、开启任务调度器(熟悉)
vTaskStartScheduler()
作用:用于启动任务调度器,任务调度器启动后, FreeRTOS 便会开始进行任务调度
该函数内部实现,如下:
1、创建空闲任务
2、如果使能软件定时器,则创建定时器任务
3、关闭中断,防止调度器开启之前或过程中,受中断干扰,会在运行第一个任务时打开中断
4、初始化全局变量,并将任务调度器的运行标志设置为已运行
5、初始化任务运行时间统计功能的时基定时器
6、调用函数 xPortStartScheduler()
xPortStartScheduler()
作用:该函数用于完成启动任务调度器中与硬件架构相关的配置部分,以及启动第一个任务
该函数内部实现,如下:
1、检测用户在 FreeRTOSConfig.h 文件中对中断的相关配置是否有误
2、配置 PendSV 和 SysTick 的中断优先级为最低优先级
3、调用函数 vPortSetupTimerInterrupt()配置 SysTick
4、初始化临界区嵌套计数器为 0
5、调用函数 prvEnableVFP()使能 FPU
6、调用函数 prvStartFirstTask()启动第一个任务
二、启动第一个任务(熟悉)
想象下应该如何启动第一个任务?
假设我们要启动的第一个任务是任务A,那么就需要将任务A的寄存器值恢复到CPU寄存器
任务A的寄存器值,在一开始创建任务时就保存在任务堆栈里边!
注意:
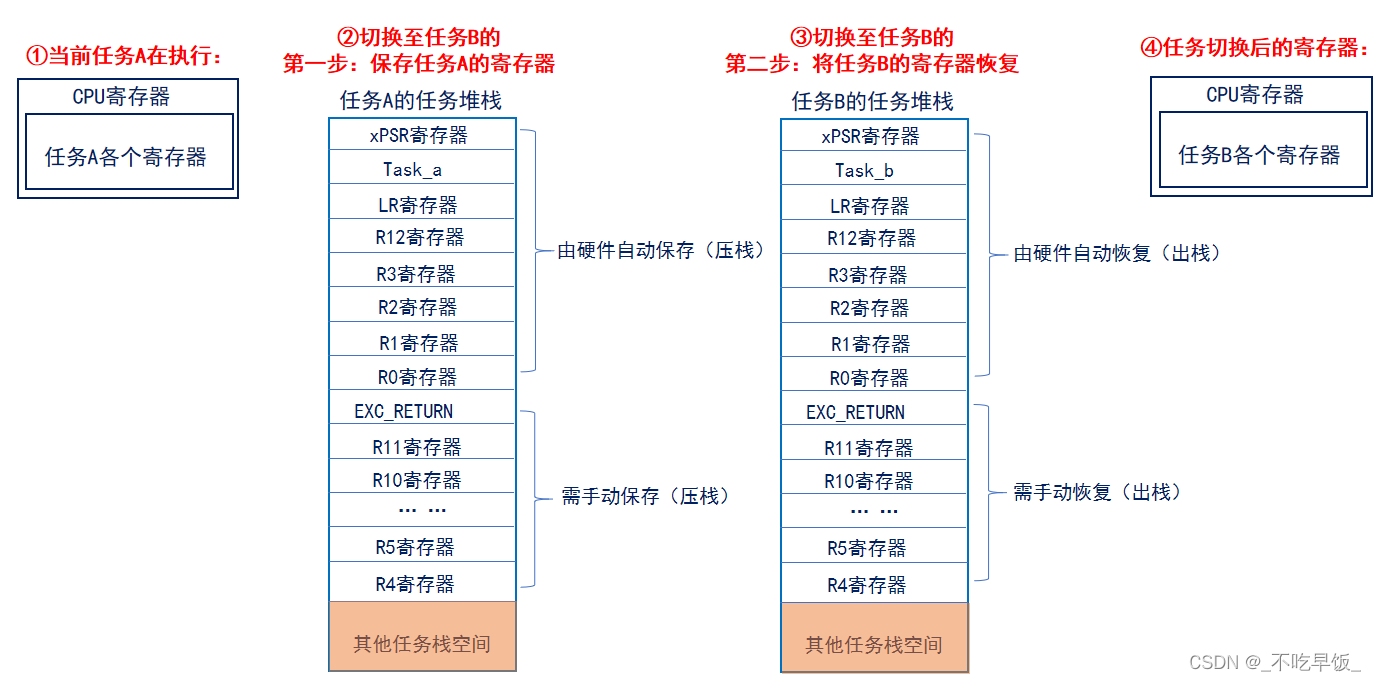
1、中断产生时,硬件自动将xPSR,PC(R15),LR(R14),R12,R3-R0出/入栈;而R4~R11需要手动出/入栈
2、进入中断后硬件会强制使用MSP指针 ,此时LR(R14)的值将会被自动被更新为特殊的EXC_RETURN
2.1,prvStartFirstTask () /* 开启第一个任务 */
用于初始化启动第一个任务前的环境,主要是重新设置MSP 指针,并使能全局中断
1、什么是MSP指针?
程序在运行过程中需要一定的栈空间来保存局部变量等一些信息。当有信息保存到栈中时,MCU 会自动更新 SP 指针,ARM Cortex-M 内核提供了两个栈空间
主堆栈指针(MSP):它由 OS 内核、异常服务例程以及所有需要特权访问的应用程序代码来使用
进程堆栈指针(PSP):用于常规的应用程序代码(不处于异常服务例程中时)
在FreeRTOS中,中断使用MSP(主堆栈),中断以外使用PSP(进程堆栈)
2、为什么是 0xE000ED08?
因为需从 0xE000ED08 获取向量表的偏移,为啥要获得向量表呢?因为向量表的第一个是 MSP 指针!
取 MSP 的初始值的思路是先根据向量表的位置寄存器 VTOR (0xE000ED08) 来获取向量表存储的地址;
再根据向量表存储的地址,来访问第一个元素,也就是初始的 MSP
CM3 允许向量表重定位——从其它地址处开始定位各异常向量 这个就是向量表偏移量寄存器,向量表的起始地址保存的就是主栈指针MSP 的初始值
2.2,vPortSVCHandler () /* SVC中断服务函数 */
注意:SVC中断只在启动第一次任务时会调用一次,以后均不调用
当使能了全局中断,并且手动触发 SVC 中断后,就会进入到 SVC 的中断服务函数中
- 通过 pxCurrentTCB 获取优先级最高的就绪态任务的任务栈地址,优先级最高的就绪态任务是系统将要运行的任务
- 通过任务的栈顶指针,将任务栈中的内容出栈到 CPU 寄存器中,任务栈中的内容在调用任务创建函数的时候,已初始化,然后设置 PSP 指针 。
- 通过往 BASEPRI 寄存器中写 0,允许中断。
- R14 是链接寄存器 LR,在 ISR 中(此刻我们在 SVC 的 ISR 中),它记录了异常返回值 EXC_RETURN,而EXC_RETURN 只有 6 个合法的值(M4、M7),如下表所示:

出栈/压栈汇编指令详解
1、出栈(恢复现场),方向:从下往上(低地址往高地址):假设r0地址为0x04汇编指令示例:
ldmia r0!, {r4-r6} /* 任务栈r0地址由低到高,将r0存储地址里面的内容手动加载到 CPU寄存器r4、r5、r6 */
r0地址(0x04)内容加载到r4,此时地址r0 = r0+4 = 0x08
r0地址(0x08)内容加载到r5,此时地址r0 = r0+4 = 0x0C
r0地址(0x0C)内容加载到r6,此时地址r0 = r0+4 = 0x10
2、压栈(保存现场),方向:从上往下(高地址往低地址):假设r0地址为0x10汇编指令示例:
stmdb r0!, {r4-r6} } /* r0的存储地址由高到低递减,将r4、r5、r6里的内容存储到r0的任务栈里面。 */
地址:r0 = r0-4 = 0x0C,将r6的内容(寄存器值)存放到r0所指向地址(0x0C)
地址:r0 = r0-4 = 0x08,将r5的内容(寄存器值)存放到r0所指向地址(0x08)
地址:r0 = r0-4 = 0x04,将r4的内容(寄存器值)存放到r0所指向地址(0x04)
三、任务切换(掌握)
任务切换的本质:就是CPU寄存器的切换。
假设当由任务A切换到任务B时,主要分为两步:
第一步:需暂停任务A的执行,并将此时任务A的寄存器保存到任务堆栈,这个过程叫做保存现场;
第二步:将任务B的各个寄存器值(被存于任务堆栈中)恢复到CPU寄存器中,这个过程叫做恢复现场;
对任务A保存现场,对任务B恢复现场,这个整体的过程称之为:上下文切换
注意:任务切换的过程在PendSV中断服务函数里边完成
PendSV中断是如何触发的?
1、滴答定时器中断调用
2、执行FreeRTOS提供的相关API函数:portYIELD()
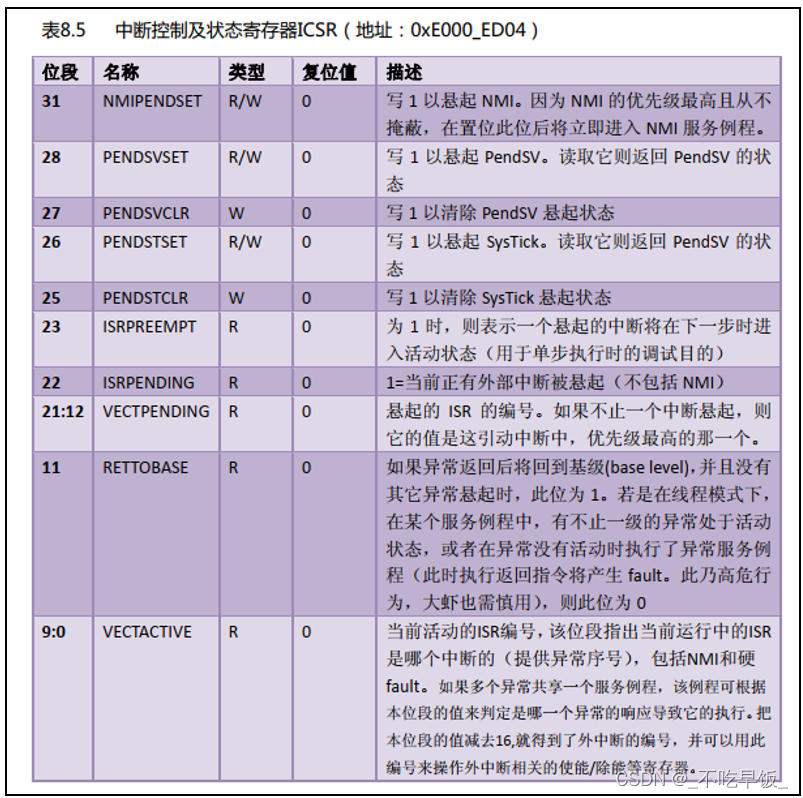
本质:通过向中断控制和状态寄存器 ICSR 的bit28 写入 1 挂起 PendSV 来启动 PendSV 中断
查找最高优先级任务
vTaskSwitchContext( ) /* 查找最高优先级任务 /
taskSELECT_HIGHEST_PRIORITY_TASK( ) / 通过这个函数完成 */
#define taskSELECT_HIGHEST_PRIORITY_TASK()
{
UBaseType_t uxTopPriority;
portGET_HIGHEST_PRIORITY( uxTopPriority, uxTopReadyPriority );
configASSERT( listCURRENT_LIST_LENGTH( &( pxReadyTasksLists[ uxTopPriority ] ) ) > 0 );
listGET_OWNER_OF_NEXT_ENTRY( pxCurrentTCB, &( pxReadyTasksLists[ uxTopPriority ] ) );
}
前导置零指令
#define portGET_HIGHEST_PRIORITY( uxTopPriority, uxReadyPriorities ) uxTopPriority = ( 31UL - ( uint32_t ) __clz( ( uxReadyPriorities ) ) )

所谓的前导置零指令,大家可以简单理解为计算一个 32位数,头部 0 的个数
通过前导置零指令获得最高优先级
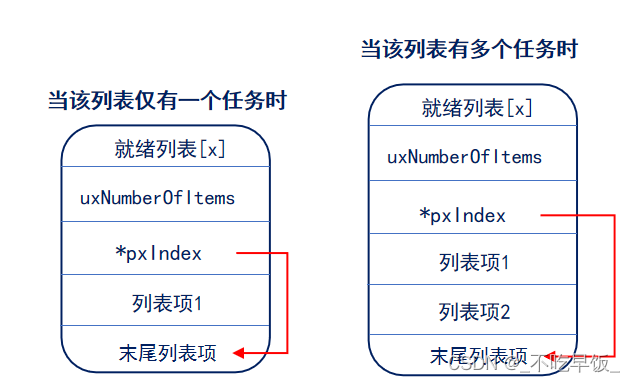
获取最高优先级任务的任务控制块
#define listGET_OWNER_OF_NEXT_ENTRY( pxTCB, pxList )
{
List_t * const pxConstList = ( pxList );
( pxConstList )->pxIndex = ( pxConstList )->pxIndex->pxNext;
if( ( void * ) ( pxConstList )->pxIndex == ( void * ) &( ( pxConstList )->xListEnd ) )
{
( pxConstList )->pxIndex = ( pxConstList )->pxIndex->pxNext;
}
( pxTCB ) = ( pxConstList )->pxIndex->pvOwner;
}
通过该函数获取当前最高优先级任务的任务控制块