网络驱动是 linux 里面驱动三巨头之一, linux 下的网络功能非常强大,嵌入式 linux 中也常常用到网络功能。前面我们已经讲过了字符设备驱动和块设备驱动,本章我们就来学习一下linux 里面的网络设备驱动。
嵌入式网络简介
网络硬件接口
首先,嵌入式网络硬件分为两部分: MAC 和 PHY,大家都是通过看数据手册来判断一款 SOC 是否支持网络,如果一款芯片数据手册说自己支持网络,一般都是说的这款 SOC 内置 MAC, MAC 类似 I2C 控制器、 SPI 控制器一样的外设。但是光有 MAC还不能直接驱动网络,还需要另外一个芯片: PHY,因此对于内置 MAC 的 SOC,其外部必须搭配一个 PHY 芯片。但是有些 SOC 内部没有 MAC,那也就没法搭配 PHY 芯片了,这些内部没有网络 MAC 的芯片如何上网呢?这里就要牵扯出常见的两个嵌入式网络硬件方案了。
SOC 内部没有网络 MAC 外设
我们一般说某个 SOC 不支持网络,说的就是它没有网络 MAC。那么这个芯片就不能上网了吗?显然不是的,既然没有内部 MAC,那么可以找个外置的 MAC 芯片啊,不过一般这种外置的网络芯片都是 MAC+PHY 一体的。比如三星 linux 开发板里面用的最多的 DM9000,因为三星的芯片基本没有内部 MAC(比如 S3C2440、 S5PV210, 4412 等),所以三星的开发板都是通过外置的 DM9000 来完成有线网络功能的, DM9000 对 SOC 提供了一个 SRAM 接口, SOC 会以 SRAM 的方式操作 DM9000。
有些外置的网络芯片更强大,内部甚至集成了硬件 TCP/IP 协议栈,对外提供一个 SPI 接口,比如 W5500。这个一般用于单片机领域,单片机通过 SPI 接口与 W5500 进行通信, 由于W5500 内置了硬件 TCP/IP 协议栈,因此单片机就不需要移植负责的软件协议栈,直接通过 SPI来操作 W5500,简化了单片机联网方案。
这种方案的优点就是让不支持网络的 SOC 能够另辟蹊径,实现网络功能,但是缺点就是网络效率不高,因为一般芯片内置的 MAC 会有网络加速引擎,比如网络专用 DMA,网络处理效率会很高。而且此类芯片网速都不快,基本就是 10/100M。另外,相比 PHY 芯片而言,此类芯片的成本也比较高,可选择比较少。
SOC 与外部 MAC+PHY 芯片的连接如图所示:
SOC 内部集成网络 MAC 外设
我们一般说某个 SOC 支持网络,说的就是他内部集成网络 MAC 外设,此时我们还需要外接一个网络 PHY 芯片。此时就有朋友会有疑问, PHY 芯片不能也集成进 SOC 吗?笔者目前还没见过将 PHY 也集成到芯片里面的 SOC。
一般常见的通用 SOC 都会集成网络 MAC 外设,比如 STM32F4/F7/H7 系列、 NXP 的 I.MX系列,内部集成网络 MAC 的优点如下:
①、内部 MAC 外设会有专用的加速模块,比如专用的 DMA,加速网速数据的处理。
②、网速快,可以支持 10/100/1000M 网速。
③、外接 PHY 可选择性多,成本低。
内部的 MAC 外设会通过 MII 或者 RMII 接口来连接外部的 PHY 芯片, MII/RMII 接口用来传输网络数据。另外主控需要配置或读取 PHY 芯片,也就是读写 PHY 的内部寄存器,所以还需要一个控制接口,叫做 MDIO, MDIO 很类似 IIC,也是两根线,一根数据线叫做 MDIO,一根时钟线叫做 MDC。
SOC 内部 MAC 外设与外部 PHY 芯片的连接如图所示:
MII/RMII接口
前面我们说了,内部 MAC 通过 MII/RMII 接口来与外部的 PHY 芯片连接,完成网络数据传输,本节我们就来学习一下什么是 MII 和 RMII 接口。
MII 接口
MII 全称是 Media Independent Interface,直译过来就是介质独立接口,它是 IEEE-802.3 定义的以太网标准接口, MII 接口用于以太网 MAC 连接 PHY 芯片,连接示意图如图所示: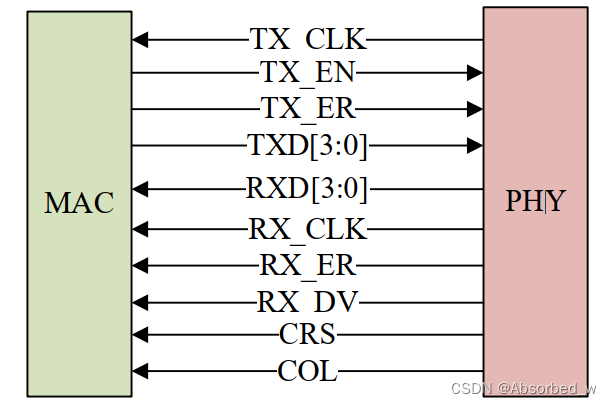
MII 接口一共有 16 根信号线,含义如下:
TX_CLK: 发送时钟,如果网速为 100M 的话时钟频率为 25MHz, 10M 网速的话时钟频率为 2.5MHz,此时钟由 PHY 产生并发送给 MAC。
TX_EN: 发送使能信号。
TX_ER: 发送错误信号,高电平有效,表示 TX_ER 有效期内传输的数据无效。 10Mpbs 网速下 TX_ER 不起作用。
TXD[3:0]:发送数据信号线,一共 4 根。
RXD[3:0]: 接收数据信号线,一共 4 根。
RX_CLK: 接收时钟信号,如果网速为 100M 的话时钟频率为 25MHz, 10M 网速的话时钟频率为 2.5MHz, RX_CLK 也是由 PHY 产生的。
RX_ER: 接收错误信号,高电平有效,表示 RX_ER 有效期内传输的数据无效。 10Mpbs 网速下 RX_ER 不起作用。
RX_DV: 接收数据有效,作用类似 TX_EN。
CRS: 载波侦听信号。
COL: 冲突检测信号。
MII 接口的缺点就是所需信号线太多,这还没有算 MDIO 和 MDC 这两根管理接口的数据线,因此 MII 接口使用已经越来越少了。
RMII 接口
RMII 全称是 Reduced Media Independent Interface,翻译过来就是精简的介质独立接口,也就是 MII 接口的精简版本。 RMII 接口只需要 7 根数据线,相比 MII 直接减少了 9 根,极大的方便了板子布线, RMII 接口连接 PHY 芯片的示意图如图所示: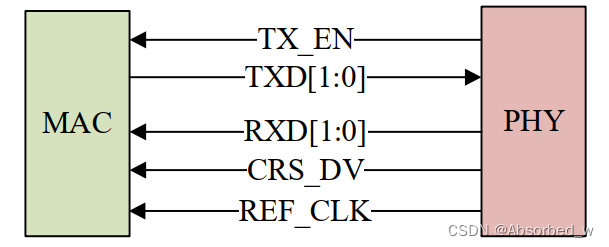
TX_EN: 发送使能信号。
TXD[1:0]: 发送数据信号线,一共 2 根。
RXD[1:0]:接收数据信号线,一共 2 根。
CRS_DV: 相当于 MII 接口中的 RX_DV 和 CRS 这两个信号的混合。
REF_CLK: 参考时钟,由外部时钟源提供, 频率为 50MHz。这里与 MII 不同, MII 的接收和发送时钟是独立分开的,而且都是由 PHY 芯片提供的。
除了 MII 和 RMII 以外,还有其他接口,比如 GMII、 RGMII、 SMII、 SGMII 等,关于其他接口基本都是大同小异的,这里就不做讲解了。正点原子 ALPAH 开发板上的两个网口都是采用 RMII 接口来连接 MAC 与外部 PHY 芯片。
MDIO 接口
MDIO 全称是 Management Data Input/Output,直译过来就是管理数据输入输出接口,是一个简单的两线串行接口,一根 MDIO 数据线,一根 MDC 时钟线。驱动程序可以通过 MDIO 和MDC 这两根线访问 PHY 芯片的任意一个寄存器。 MDIO 接口支持多达 32 个 PHY。 同一时刻内只能对一个 PHY 进行操作,那么如何区分这 32 个 PHY 芯片呢?和 IIC 一样,使用器件地址即可。同一 MDIO 接口下的所有 PHY 芯片,其器件地址不能冲突,必须保证唯一,具体器件地址值要查阅相应的 PHY 数据手册。
因此, MAC 和外部 PHY 芯片进行连接的时候主要是 MII/RMII 和 MDIO 接口,另外可能还需要复位、中断等其他引脚。
RJ45 接口
网络设备是通过网线连接起来的,插入网线的叫做 RJ45 座,如图所示:
RJ45 座要与 PHY 芯片连接在一起,但是中间需要一个网络变压器,网络变压器用于隔离以及滤波等,网络变压器也是一个芯片,外形一般如图 所示:
但是现在很多 RJ45 座子内部已经集成了网络变压器,比如正点原子 ALPHA 开发板所使用的 HR911105A 就是内置网络变压器的 RJ45 座。内置网络变压器的 RJ45 座和不内置的引脚一样,但是一般不内置的 RJ45 座会短一点。因此,大家在画板的时候一定要考虑你所使用的 RJ45座是否内置网络变压器,如果不内置的话就要自行添加网络变压器部分电路!!!同理,如果你所设计的硬件是需要内置网络变压器的 RJ45 座,肯定不能随便焊接一个不内置变压器的 RJ45座,否则网络工作不正常!
RJ45 座子上一般有两个灯,一个黄色(橙色),一个绿色,绿色亮的话表示网络连接正常,黄色闪烁的话说明当前正在进行网络通信。这两个灯由 PHY 芯片控制, PHY 芯片会有两个引脚来连接 RJ45 座上的这两个灯。内部 MAC+外部 PHY+RJ45 座(内置网络变压器)就组成了一个完整的嵌入式网络接口硬件,如图所示:
I.MX6ULL ENET 接口简介
I.MX6ULL 有两个网络接口,也就是两个 MAC 外设,一个 MAC 连接一个 PHY 芯片形成一个完整网络接口,本节我们简单了解一下 I.MX6ULL 自带的 ENET 接口。 I.MX6ULL 内部自带的 ENET 外设其实就是一个网络 MAC,支持 10/100M。实现了三层网络加速,用于加速那些通用的网络协议,比如 IP、 TCP、 UDP 和 ICMP 等,为客户端应用程序提供加速服务。
I.MX6ULL 内核集成了两个 10/100Mbit/S 的网络 MAC,符合 IEEE802.3-2002 标准, MAC层支持双工、半双工局域网。 MAC 可编程、可以作为 NIC 卡或其他一些交换器件。根据 IETF
RFC 2819 协议, MAC 实现了 RMON(Remote Network Monitoring)计数功能。 MAC 内核拥有硬件加速处理单元来提高网络性能,硬件加速单元用于处理 TCP/IP、 UDP、 ICMP 等协议。通过
硬件来处理帧头等信息,效果要比用一大堆软件处理要好很多。 ENET 外设有一个专用的 DMA,此 DMA 用于在 ENET 外设和 SOC 之间传输数据,并且支持可编程的增强型的缓冲描述符,用
以支持 IEEE 1588。
I.MX6ULL 内部 ENET 外设主要特性如下:
1)、实现了全功能的 802.3 规范前导码/SFD 生成、帧填充、 CRC 生成和检查。
2)、支持零长的前导码。
3)、支持 10/100M 动态配置。
4)、兼容 AMD 远端节点电源管理的魔术帧中断检测。
5)、可以通过如下接口无缝的连接 PHY 芯片:
· 4bit 的 MII 接口,频率为 2.5/25MHz。
· 4bit 的 MII-Lite 接口,也就是 MII 接口取消掉 CRS 和 COL 这两根线,频率也是2.5/25MHz。
· 2bit 的 RMII 接口,频率为 50MHz。
6)、 MAC 地址可编程。
7)、多播和单播地址过滤,降低更高层的处理负担。
8)、 MDIO 主接口,用于管理和配置 PHY 设备。
……
I.MX6ULL 的 ENET 外设内容比较多,详细的介绍请查阅《I.MX6ULL 参考手册》的“Chapter22 10/100-Mbps Ethernet MAC(ENET)”章节。我们在编写驱动的时候其实并不需要关注 ENET外设的具体内容,因为这部分驱动是 SOC 厂商编写的,我们重点关注的是更换 PHY 芯片以后哪里需要调整。
PHY 基础知识简介
PHY 是 IEEE 802.3 规定的一个标准模块,前面说了, SOC 可以对 PHY 进行配置或者读取PHY 相关状态,这个就需要 PHY 内部寄存器去实现了。 PHY 芯片寄存器地址空间为 5 位,地址 0~31 共 32 个寄存器, IEEE 定义了 0~15 这 16 个寄存器的功能, 16~31 这 16 个寄存器由厂商自行实现。也就是说不管你用的哪个厂家的 PHY 芯片,其中 0~15 这 16 个寄存器是一模一样的。仅靠这 16 个寄存器是完全可以驱动起 PHY 芯片的,至少能保证基本的网络数据通信,因此 Linux 内核有通用 PHY 驱动,按道理来讲,不管你使用的哪个厂家的 PHY 芯片,都可以使用 Linux 的这个通用 PHY 驱动来验证网络工作是否正常。事实上在实际开发中可能会遇到一些其他的问题导致 Linux 内核的通用 PHY 驱动工作不正常,这个时候就需要驱动开发人员去调试了。但是,随着现在的 PHY 芯片性能越来越强大, 32 个寄存器可能满足不了厂商的需求,因此很多厂商采用分页技术来扩展寄存器地址空间,以求定义更多的寄存器。这些多出来的寄存器可以用于实现厂商特有的一些技术,因此 Linux 内核的通用 PHY 驱动就无法驱动这些特色功能了,这个时候就需要 PHY 厂商提供相应的驱动源码了,所以大家也会在 Linux 内核里面看到很多具体的 PHY 芯片驱动源码。不管你的 PHY 芯片有多少特色功能,按道理来讲, Linux 内核的通用 PHY 驱动是绝对可以让你这 PHY 芯片实现基本的网络通信,因此大家也不用担心更换 PHY 芯片以后网络驱动编写是不是会很复杂。
IEEE802.3 协议对 PHY 的前16 个寄存器功能进行了规定,如图所示:
LAN8720A 详解
LAN8720A 是低功耗的 10/100M 单以太网 PHY 层芯片, 可应用于机顶盒、网络打印机、嵌入式通信设备、 IP 电话等领域。 I/O 引脚电压符合 IEEE802.3-2005 标准。 LAN8720A 支持通过 RMII 接口与以太网 MAC 层通信,内置 10-BASE-T/100BASE-TX 全双工传输模块,支持10Mbps 和 100Mbps。 LAN8720A 可以通过自协商的方式选择与目的主机最佳的连接方式(速度和双工模式)。支持 HP Auto-MDIX 自动翻转功能,无需更换网线即可将连接更改为直连或交叉连接。
LAN8720A 的主要特点如下:
· 高性能的 10/100M 以太网传输模块
· 支持 RMII 接口以减少引脚数
· 支持全双工和半双工模式
· 两个状态 LED 输出
· 可以使用 25M 晶振以降低成本
· 支持自协商模式
· 支持 HP Auto-MDIX 自动翻转功能
· 支持 SMI 串行管理接口
· 支持 MAC 接口
LAN8720A 功能框图如图所示。
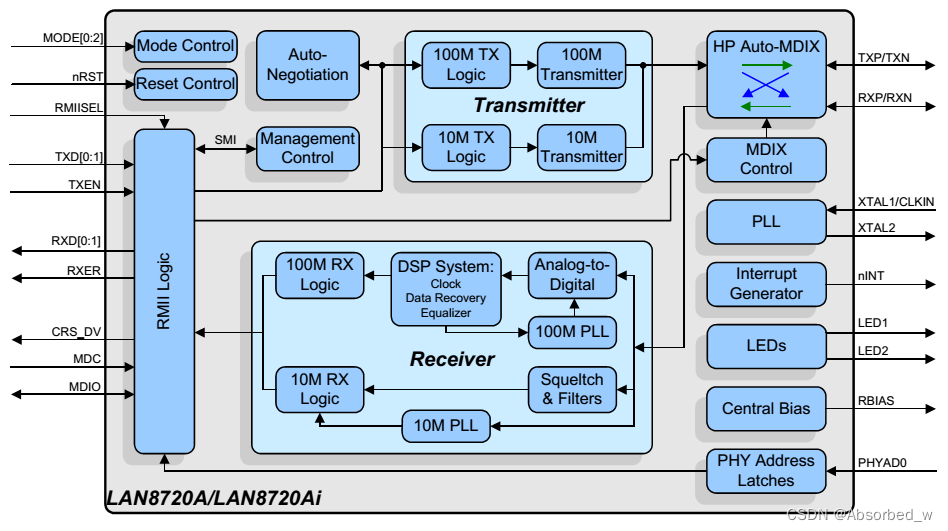
LAN8720A 中断管理
LAN8720A 的器件管理接口支持非 IEEE 802.3 规范的中断功能。当一个中断事件发生并且相应事件的中断位使能, LAN8720A 就会在 nINT(14 脚)产生一个低电平有效的中断信号。
LAN8720A 的中断系统提供两种中断模式:主中断模式和复用中断模式。主中断模式是默认中断模式, LAN8720A 上电或复位后就工作在主中断模式,当模式控制/状态寄存器(十进制地址
为 17)的 ALTINT 位为 0 时 LAN8720A 工作在主模式,当 ALTINT 位为 1 时工作在复用中断模式。正点原子的 ALPHA 开发板虽然将 LAN8720A 的中断引脚连接到了 I.MX6ULL 上,但是并
没有使用中断功能,关于中断的具体用法可以参考 LAN8720A 数据手册。
PHY 地址设置
MAC 层通过 MDIO/MDC 总线对 PHY 进行读写操作, MDIO 最多可以控制 32 个 PHY 芯片,通过不同的 PHY 芯片地址来对不同的 PHY 操作。 LAN8720A 通过设置 RXER/PHYAD0引脚来设置其 PHY 地址,默认情况下为 0,其地址设置如表所示。
| RXER/PHYAD0 引脚状态 | PHY 地址 |
| 上拉 | 0X01 |
| 下拉(默认) | 0X00 |
正点原子 ALPHA 开发板的 ENET1 网络的 LAN8720A 上的 RXER/PHYAD0 引脚为默认状态(原理图上有个 10K 下拉,但是没有焊接),因此 ENET1 上的 LAN8720A 地址为 0。 ENET2网络上的 LAN8720A 上的 RXER/PHYAD0 引脚接了个 10K 上拉电阻,因此 ENET2 上的LAN8720A 地址为 1。
nINT/REFCLKO 配置
nINTSEL 引脚(2 号引脚)用于设置 nINT/REFCLKO 引脚(14 号引脚)的功能。 nINTSEL 配置如表所示。。
| nINTSEL 引脚值 | 模式 | nINT/REFCLKO 引脚功能 |
| nINTSEL= 0 | REF_CLK Out 模式 | nINT/REFCLKO 作为 REF_CLK 时钟源 |
| nINTSEL = 1(默认) | REF_CLK In 模式 | nINT/REFCLKO 作为中断引脚 |
对于正点原子的 ALPHA 开发板的两个 LAN8720A 而言,全都工作在默认的 REF_CLK In 模式下。当 LAN8720A 工作在 REF_CLK In 模式时, 50MHz 的外部时钟信号应接到 LAN8720 的XTAL1/CKIN 引脚(5 号引脚)上,如图所示:
为了降低成本, LAN8720A 可以从外部的 25MHz 的晶振中产生 REF_CLK 时钟。到要使用此功能时应工作在 REF_CLK Out 模式时。当工作在 REF_CLO Out 模式时 REF_CLK 的时钟源如图所示:
前面说了,正点原子的 ALPHA 开发板工作在 REF_CLK In 模式下,因此需要外部 50MHz时钟信号, I.MX6ULL 有专用的网络时钟引脚,因此 ALPHA 开发板是通过 I.MX6ULL 的ENET1_REF_CLK 和 ENET2_REF_CLK 这两个网络时钟引脚来为 LAN8720A 提供 50MHz 的时钟。
LAN8720A 内部寄存器
LAN8720A 的前 16 个寄存器满足 IEEE 的要求,在这里我们只介绍几个常用的寄存器,首先是 BCR(Basic Control Rgsister)寄存器,地址为 0, BCR 寄存器各位如表所示。
| 位 | 描述 | 类型 |
| 15 | 软件复位 1:软件复位,此位自动清零 | R/W |
| 14 | 回测 0:正常运行 1:使能回测模式 | R/W |
| 13 | 速度选择 0: 10Mbps 1: 100Mbps 注意:当使用自动协商功能时此位失能 | R/W |
| 12 | 自动协商功能 0:关闭自动协商功能 1:打开自动协商功能 | R/W |
| 11 | 掉电(power down) 0:正常运行 1:进入掉电模式 注意:进入掉电模式前自动协商必须失能 | R/W |
| 10 | 隔离 1: PHY 的 RMII 接口电气隔离 | R/W |
| 9 | 重启自动协商功能 0:正常运行 1:重启自动协商功能 注意:此位会被自动清零 | R/W SC |
| 8 | 双工模式 0:半双工 1:全双工 注意:开启自动协商功能后此位失效 | R/W |
| 7:0 | 保留 | RO |
我们说的配置 PHY 芯片,重点就是配置 BCR 寄存器,由于 LAN8720A 是个 10/100M 的PHY,因此表中没有体现出 1000M 相关的配置。但是 10/100M 相关的配置是和 IEEE的规定完全相符的,大家可以选择一个其他的 10/100M 的 PHY 芯片对比看一下,比如 NXP 官方 EVK 开发板使用的 KSZ8081。
接下来看一下 BSR(Basic Status Register)寄存器,地址为 1。此寄存器为 PHY 的状态寄存器,通过此寄存器可以获取到 PHY 芯片的工作状态, BSR 寄存器各位如表所示:
| 位 | 描述 | 类型 |
| 15 | 100BAST-T4 0:不支持 T4 1:支持 T4 | RO |
| 14 | 100BAST-TX 全双工 0:不支持 TX 全双工 1:支持 TX 全双工 | RO |
| 13 | 100BAST-TX 半双工 0:不支持 TX 半双工 1:支持 TX 半双工个 | RO |
| 12 | 10BAST-T 全双工 0:不支持 10Mbps 全双工 1:支持 10Mbps 全双工 | RO |
| 11 | 10BAST-T 半双工 0:不支持 10Mbps 半双工 1:支持 10Mbps 半双工 | RO |
| 10:6 | 保留 | RO |
| 5 | 自协商功能完成 0:自动协商未完成 1:自动协商完成 | RO |
| 4 | 远端错误 0:无远端错误 1:检测到远端错误 | RO/HL |
| 3 | 自协商功能 1:可以执行自协商功能 | RO |
| 2 | 连接状态 0:连接断开 1:连接建立 | RO/LL |
| 1 | Jabber 检测 0:未检测到 jabber 1:检测到 jabber | RO/LH |
| 0 | 扩展功能 0:不支持扩展寄存器 1:支持扩展寄存器 | RO |
从上表可以看出,和 IEEE 标准规定相比, LAN8720A 的 BSR 寄存器少了几个位,这个没关系的,不管什么 PHY 芯片,只要它实现了的位和 IEEE 规定相符就行。通过读取 BSR寄存器的值我们可以得到当前的连接速度、双工状态和连接状态等。接下来看一下 LAN8720A 的 PHY ID 寄存器 1 和 ID 寄存器 2,地址为 2 和 3,后面就成为寄存器 2 和寄存器 3。这两个寄存器都是 PHY 的 ID 寄存器。 IEEE 规定寄存器 2 和寄存器 3 为PHY 的 ID 寄存器,这两个寄存器组成一个 32 位的唯一 ID 值。 IEEE 规定了一叫做 OUI 的 ID组成方式,全称是 Organizationally Unique Identifier, OUI 一共 32 位,分为三部分: 22 位的 ID+6位厂商型号 ID+4 位厂商版本 ID,组成如图所示:
LAN8720A 的 ID 寄存器 2 如表所示:
| 位 | 描述 | 类型 | 默认值 |
| 15:0 | PHY ID 号,对应于 OUI 的 3~18 位, bit15 对应 OUI 的 bit3, bit0 对应 OUI 的 bit18。和寄存器 3 的 bit15: 10 共同组成 22 位 ID。 | R/W | 0007h |
ID 寄存器 3 如表所示:
| 位 | 描述 | 类型 | 默认值 |
| 15:10 | PHY ID 号,对应于 OUI 的 19~24 位, bit15 对 应 OUI 的 19 位, bit10 对应 OUI 的 24 位。 | R/W | 110000h |
| 9:4 | 厂商型号 ID | R/W | 001111b |
| 3:0 | 厂商版本 ID | R/W | 视具体版本而定 |
最后来看一下 LAN8720A 的特殊控制/状态寄存器,此寄存器地址为 31,寄存器内容是LAN8720A 厂商自定义的,此寄存器的各个位如表所示:
| 位 | 描述 | 类型 |
| 15:13 | 保留 | RO |
| 12 | 自协商完成 0:自协商未完成或者自协商关闭 1:自协商完成 | RO |
| 11:5 | 保留 | R/W |
| 4:2 | 速度指示 001: 10BASE-T 半双工 101: 10BAST-T 全双工 010: 100BAST-TX 半双工 110: 100BAST-TX 全双工 | RO |
| 1:0 | 保留 | RO |
特殊控制/状态寄存器中我们关心的是 bit2~bit4 这三位,因为通过这 3 位来确定连接的状态和速度,关于 LAN8720A 这个 PHY 就讲解到这里。
Linux 内核网络驱动框架
net_device 结构体
Linux 内核使用 net_device 结构体表示一个具体的网络设备, net_device 是整个网络驱动的灵魂。网络驱动的核心就是初始化 net_device 结构体中的各个成员变量,然后将初始化完成以后的 net_device 注册到 Linux 内核中。 net_device 结构体定义在 include/linux/netdevice.h 中,net_device 是一个庞大的结构体,内容如下(有缩减):
1 struct net_device {
2 char name[IFNAMSIZ];
3 struct hlist_node name_hlist;
4 char *ifalias;
5 /*
6 * I/O specific fields
7 * FIXME: Merge these and struct ifmap into one
8 */
9 unsigned long mem_end;
10 unsigned long mem_start;
11 unsigned long base_addr;
12 int irq;
13
14 atomic_t carrier_changes;
15
16 /*
17 * Some hardware also needs these fields (state,dev_list,
18 * napi_list,unreg_list,close_list) but they are not
19 * part of the usual set specified in Space.c.
20 */
21
22 unsigned long state;
23
24 struct list_head dev_list;
25 struct list_head napi_list;
26 struct list_head unreg_list;
27 struct list_head close_list;
......
60 const struct net_device_ops *netdev_ops;
61 const struct ethtool_ops *ethtool_ops;
62 #ifdef CONFIG_NET_SWITCHDEV
63 const struct swdev_ops *swdev_ops;
64 #endif
65
66 const struct header_ops *header_ops;
67
68 unsigned int flags;
......
77 unsigned char if_port;
78 unsigned char dma;
79
80 unsigned int mtu;
81 unsigned short type;
82 unsigned short hard_header_len;
83
84 unsigned short needed_headroom;
85 unsigned short needed_tailroom;
86
87 /* Interface address info. */
88 unsigned char perm_addr[MAX_ADDR_LEN];
89 unsigned char addr_assign_type;
90 unsigned char addr_len;
......
130 /*
131 * Cache lines mostly used on receive path (including eth_type_trans())
132 */
133 unsigned long last_rx;
134
135 /* Interface address info used in eth_type_trans() */
136 unsigned char *dev_addr;
137
138
139 #ifdef CONFIG_SYSFS
140 struct netdev_rx_queue *_rx;
141
142 unsigned int num_rx_queues;
143 unsigned int real_num_rx_queues;
144
145 #endif
......
158 /*
159 * Cache lines mostly used on transmit path
160 */
161 struct netdev_queue *_tx ____cacheline_aligned_in_smp;
162 unsigned int num_tx_queues;
163 unsigned int real_num_tx_queues;
164 struct Qdisc *qdisc;
165 unsigned long tx_queue_len;
166 spinlock_t tx_global_lock;
167 int watchdog_timeo;
......
173 /* These may be needed for future network-power-down code. */
174
175 /*
176 * trans_start here is expensive for high speed devices on SMP,
177 * please use netdev_queue->trans_start instead.
178 */
179 unsigned long trans_start;
......
248 struct phy_device *phydev;
249 struct lock_class_key *qdisc_tx_busylock;
250 };下面介绍一些关键的成员变量,如下:
第 2 行: name 是网络设备的名字。
第 9 行: mem_end 是共享内存结束地址。
第 10 行: mem_start 是共享内存起始地址。
第 11 行: base_addr 是网络设备 I/O 地址。
第 12 行: irq 是网络设备的中断号。
第 24 行: dev_list 是全局网络设备列表。
第 25 行: napi_list 是 napi 网络设备的列表入口。
第 26 行: unreg_list 是注销(unregister)的网络设备列表入口。
第 27 行: close_list 是关闭的网络设备列表入口。
第 60 行: netdev_ops 是网络设备的操作集函数,包含了一系列的网络设备操作回调函数,类似字符设备中的 file_operations,稍后会讲解 netdev_ops 结构体。
第 61 行: ethtool_ops 是网络管理工具相关函数集,用户空间网络管理工具会调用此结构体中的相关函数获取网卡状态或者配置网卡。
第 66 行: header_ops 是头部的相关操作函数集,比如创建、解析、缓冲等。
第 68 行: flags 是网络接口标志,标志类型定义在 include/uapi/linux/if.h 文件中,为一个枚举类型,内容如下:
1 enum net_device_flags {
2 IFF_UP = 1<<0, /* sysfs */
3 IFF_BROADCAST = 1<<1, /* volatile */
4 IFF_DEBUG = 1<<2, /* sysfs */
5 IFF_LOOPBACK = 1<<3, /* volatile */
6 IFF_POINTOPOINT = 1<<4, /* volatile */
7 IFF_NOTRAILERS = 1<<5, /* sysfs */
8 IFF_RUNNING = 1<<6, /* volatile */
9 IFF_NOARP = 1<<7, /* sysfs */
10 IFF_PROMISC = 1<<8, /* sysfs */
11 IFF_ALLMULTI = 1<<9, /* sysfs */
12 IFF_MASTER = 1<<10, /* volatile */
13 IFF_SLAVE = 1<<11, /* volatile */
14 IFF_MULTICAST = 1<<12, /* sysfs */
15 IFF_PORTSEL = 1<<13, /* sysfs */
16 IFF_AUTOMEDIA = 1<<14, /* sysfs */
17 IFF_DYNAMIC = 1<<15, /* sysfs */
18 IFF_LOWER_UP = 1<<16, /* volatile */
19 IFF_DORMANT = 1<<17, /* volatile */
20 IFF_ECHO = 1<<18, /* volatile */
21 };继续接着看 net_device 结构体。
第 77 行: if_port 指定接口的端口类型,如果设备支持多端口的话就通过 if_port 来指定所使用的端口类型。可选的端口类型定义在 include/uapi/linux/netdevice.h 中,为一个枚举类型,如下所示:
1 enum {
2 IF_PORT_UNKNOWN = 0,
3 IF_PORT_10BASE2,
4 IF_PORT_10BASET,
5 IF_PORT_AUI,
6 IF_PORT_100BASET,
7 IF_PORT_100BASETX,
8 IF_PORT_100BASEFX
9 };第 78 行: dma 是网络设备所使用的 DMA 通道,不是所有的设备都会用到 DMA。
第 80 行: mtu 是网络最大传输单元,为 1500。
第 81 行: type 用于指定 ARP 模块的类型,以太网的 ARP 接口为 ARPHRD_ETHER, Linux内核所支持的 ARP 协议定义在 include/uapi/linux/if_arp.h 中,大家自行查阅。
第 88 行: perm_addr 是永久的硬件地址,如果某个网卡设备有永久的硬件地址,那么就会填充 perm_addr。
第 90 行: addr_len 是硬件地址长度。
第 133 行: last_rx 是最后接收的数据包时间戳,记录的是 jiffies。
第 136 行: dev_addr 也是硬件地址,是当前分配的 MAC 地址,可以通过软件修改。
第 140 行: _rx 是接收队列。
第 142 行: num_rx_queues 是接收队列数量,在调用 register_netdev 注册网络设备的时候会分配指定数量的接收队列。
第 143 行: real_num_rx_queues 是当前活动的队列数量。
第 161 行: _tx 是发送队列。
第 162 行: num_tx_queues 是发送队列数量,通过 alloc_netdev_mq 函数分配指定数量的发送队列。
第 163 行: real_num_tx_queues 是当前有效的发送队列数量。
第 179 行: trans_start 是最后的数据包发送的时间戳,记录的是 jiffies。
第 248 行: phydev 是对应的 PHY 设备。
申请 net_device
编写网络驱动的时候首先要申请 net_device,使用 alloc_netdev 函数来申请 net_device,这是一个宏,宏定义如下:
1 #define alloc_netdev(sizeof_priv, name, name_assign_type, setup) \
2 alloc_netdev_mqs(sizeof_priv, name, name_assign_type, setup, 1, 1)可以看出 alloc_netdev 的本质是 alloc_netdev_mqs 函数,此函数原型如下:
struct net_device * alloc_netdev_mqs ( int sizeof_priv,
const char *name,
void (*setup) (struct net_device *))
unsigned int txqs,
unsigned int rxqs);函数参数和返回值含义如下:
sizeof_priv: 私有数据块大小。
name: 设备名字。
setup: 回调函数,初始化设备的设备后调用此函数。
txqs: 分配的发送队列数量。
rxqs: 分配的接收队列数量。
返回值: 如果申请成功的话就返回申请到的 net_device 指针,失败的话就返回 NULL。
事实上网络设备有多种,大家不要以为就只有以太网一种。 Linux 内核内核支持的网络接口有很多,比如光纤分布式数据接口(FDDI)、以太网设备(Ethernet)、红外数据接口(InDA)、高性能并行接口(HPPI)、 CAN 网络等。内核针对不同的网络设备在 alloc_netdev 的基础上提供了一层封装,比如我们本章讲解的以太网,针对以太网封装的 net_device 申请函数是 alloc_etherdev,这也是一个宏,内容如下:
1 #define alloc_etherdev(sizeof_priv)
alloc_etherdev_mq(sizeof_priv, 1)
2 #define alloc_etherdev_mq(sizeof_priv, count)
alloc_etherdev_mqs(sizeof_priv, count, count)可以看出,alloc_etherdev最终依靠的是alloc_etherdev_mqs函数,此函数就是对alloc_netdev_mqs 的简单封装,函数内容如下:
1 struct net_device *alloc_etherdev_mqs(int sizeof_priv,
2 unsigned int txqs,
3 unsigned int rxqs)
4 {
5 return alloc_netdev_mqs(sizeof_priv, "eth%d", NET_NAME_UNKNOWN,
6 ether_setup, txqs, rxqs);
7 }第 5 行调用 alloc_netdev_mqs 来申请 net_device,注意这里设置网卡的名字为“eth%d”,这是格式化字符串,大家进入开发板的 linux 系统以后看到的“eth0”、“eth1”这样的网卡名字就是从这里来的。同样的,这里设置了以太网的 setup 函数为 ether_setup,不同的网络设备其 setup函数不同,比如 CAN 网络里面 setup 函数就是 can_setup。ether_setup 函数会对 net_device 做初步的初始化,函数内容如下所示:
1 void ether_setup(struct net_device *dev)
2 {
3 dev->header_ops = ð_header_ops;
4 dev->type = ARPHRD_ETHER;
5 dev->hard_header_len = ETH_HLEN;
6 dev->mtu = ETH_DATA_LEN;
7 dev->addr_len = ETH_ALEN;
8 dev->tx_queue_len = 1000; /* Ethernet wants good queues */
9 dev->flags = IFF_BROADCAST|IFF_MULTICAST;
10 dev->priv_flags |= IFF_TX_SKB_SHARING;
11
12 eth_broadcast_addr(dev->broadcast);
13 }关于 net_device 的申请就讲解到这里,对于网络设备而言,使用 alloc_etherdev 或 alloc_etherdev_mqs 来申请 net_device。 NXP 官方编写的网络驱动就是采用 alloc_etherdev_mqs来申请 net_device。
删除 net_device
当我们注销网络驱动的时候需要释放掉前面已经申请到的 net_device,释放函数为free_netdev,函数原型如下:
void free_netdev(struct net_device *dev)函数参数和返回值含义如下:
dev: 要释放掉的 net_device 指针。
返回值: 无。
注册 net_device
net_device 申请并初始化完成以后就需要向内核注册 net_device,要用到函数 register_netdev,函数原型如下:
int register_netdev(struct net_device *dev)函数参数和返回值含义如下:
dev: 要注册的 net_device 指针。
返回值: 0 注册成功,负值 注册失败。
注销 net_device
既然有注册,那么必然有注销,注销 net_device 使用函数 unregister_netdev,函数原型如下:
void unregister_netdev(struct net_device *dev)函数参数和返回值含义如下:
dev: 要注销的 net_device 指针。
返回值: 无。
net_device_ops 结构体
net_device 有个非常重要的成员变量: netdev_ops,为 net_device_ops 结构体指针类型,这就是网络设备的操作集。 net_device_ops 结构体定义在 include/linux/netdevice.h 文件中,
net_device_ops 结构体里面都是一些以“ndo_”开头的函数,这些函数就需要网络驱动编写人员去实现,不需要全部都实现,根据实际驱动情况实现其中一部分即可。结构体内容如下所示(结
构体比较大,这里有缩减):
1 struct net_device_ops {
2 int (*ndo_init)(struct net_device *dev);
3 void (*ndo_uninit)(struct net_device *dev);
4 int (*ndo_open)(struct net_device *dev);
5 int (*ndo_stop)(struct net_device *dev);
6 netdev_tx_t (*ndo_start_xmit) (struct sk_buff *skb,
7 struct net_device *dev);
8 u16 (*ndo_select_queue)(struct net_device *dev,
9 struct sk_buff *skb,
10 void *accel_priv,
11 select_queue_fallback_t fallback);
12 void (*ndo_change_rx_flags)(struct net_device *dev,
13 int flags);
14 void (*ndo_set_rx_mode)(struct net_device *dev);
15 int (*ndo_set_mac_address)(struct net_device *dev,
16 void *addr);
17 int (*ndo_validate_addr)(struct net_device *dev);
18 int (*ndo_do_ioctl)(struct net_device *dev,
19 struct ifreq *ifr, int cmd);
20 int (*ndo_set_config)(struct net_device *dev,
21 struct ifmap *map);
22 int (*ndo_change_mtu)(struct net_device *dev,
23 int new_mtu);
24 int (*ndo_neigh_setup)(struct net_device *dev,
25 struct neigh_parms *);
26 void (*ndo_tx_timeout) (struct net_device *dev);
......
36 #ifdef CONFIG_NET_POLL_CONTROLLER
37 void (*ndo_poll_controller)(struct net_device *dev);
38 int (*ndo_netpoll_setup)(struct net_device *dev,
39 struct netpoll_info *info);
40 void (*ndo_netpoll_cleanup)(struct net_device *dev);
41 #endif
......
104 int (*ndo_set_features)(struct net_device *dev,
105 netdev_features_t features);
......
166 };第 2 行: ndo_init 函数,当第一次注册网络设备的时候此函数会执行,设备可以在此函数中做一些需要退后初始化的内容,不过一般驱动中不使用此函数,虚拟网络设备可能会使用。
第 3 行: ndo_uninit 函数,卸载网络设备的时候此函数会执行。
第 4 行: ndo_open 函数,打开网络设备的时候此函数会执行,网络驱动程序需要实现此函数,非常重要!以 NXP 的 I.MX 系列 SOC 网络驱动为例,会在此函数中做如下工作:
·使能网络外设时钟。
·申请网络所使用的环形缓冲区。
·初始化 MAC 外设。
·绑定接口对应的 PHY。
·如果使用 NAPI 的话要使能 NAPI 模块,通过 napi_enable 函数来使能。
·开启 PHY。
·调用 netif_tx_start_all_queues 来使能传输队列,也可能调用 netif_start_queue 函数。
· ……
第 5 行: ndo_stop 函数,关闭网络设备的时候此函数会执行,网络驱动程序也需要实现此函数。以 NXP 的 I.MX 系列 SOC 网络驱动为例,会在此函数中做如下工作:
·停止 PHY。
·停止 NAPI 功能。
·停止发送功能。
·关闭 MAC。
·断开 PHY 连接。
·关闭网络时钟。
·释放数据缓冲区。
· ……
第 6 行: ndo_start_xmit 函数,当需要发送数据的时候此函数就会执行,此函数有一个参数为 sk_buff 结构体指针, sk_buff 结构体在 Linux 的网络驱动中非常重要, sk_buff 保存了上层传递给网络驱动层的数据。也就是说,要发送出去的数据都存在了 sk_buff 中,关于 sk_buff 稍后会做详细的讲解。如果发送成功的话此函数返回 NETDEV_TX_OK,如果发送失败了就返回
NETDEV_TX_BUSY,如果发送失败了我们就需要停止队列。
第 8 行: ndo_select_queue 函数,当设备支持多传输队列的时候选择使用哪个队列。
第 14 行: ndo_set_rx_mode 函数,此函数用于改变地址过滤列表,根据 net_device 的 flags成员变量来设置 SOC 的网络外设寄存器。比如 flags 可能为 IFF_PROMISC、 IFF_ALLMULTI 或
IFF_MULTICAST,分别表示混杂模式、单播模式或多播模式。
第 15 行: ndo_set_mac_address 函数,此函数用于修改网卡的 MAC 地址,设置 net_device的 dev_addr 成员变量, 并且将 MAC 地址写入到网络外设的硬件寄存器中。
第 17 行: ndo_validate_addr 函数,验证 MAC 地址是否合法,也即是验证 net_device 的dev_addr 中的 MAC 地址是否合法,直接调用 is_valid_ether_addr 函数。
第 18 行: ndo_do_ioctl 函数,用户程序调用 ioctl 的时候此函数就会执行,比如 PHY 芯片相关的命令操作,一般会直接调用 phy_mii_ioctl 函数。
第 22 行: ndo_change_mtu 函数,更改 MTU 大小。
第 26 行: ndo_tx_timeout 函数,当发送超时的时候产生会执行,一般都是网络出问题了导致发送超时。一般可能会重启 MAC 和 PHY,重新开始数据发送等。
第 37 行: ndo_poll_controller 函数,使用查询方式来处理网卡数据的收发。
第 104 行: ndo_set_features 函数,修改 net_device 的 features 属性,设置相应的硬件属性。
sk_buff 结构体
网络是分层的,对于应用层而言不用关心具体的底层是如何工作的,只需要按照协议将要发送或接收的数据打包好即可。打包好以后都通过 dev_queue_xmit 函数将数据发送出去,接收数据的话使用 netif_rx 函数即可,我们依次来看一下这两个函数。
dev_queue_xmit 函数
此函数用于将网络数据发送出去,函数定义在 include/linux/netdevice.h 中,函数原型如下:
static inline int dev_queue_xmit(struct sk_buff *skb)函数参数和返回值含义如下:
skb: 要发送的数据, 这是一个 sk_buff 结构体指针, sk_buff 是 Linux 网络驱动中一个非常重要的结构体,网络数据就是以 sk_buff 保存的,各个协议层在 sk_buff 中添加自己的协议头,最终由底层驱动将 sk_buff 中的数据发送出去。网络数据的接收过程恰好相反,网络底层驱动将接收到的原始数据打包成 sk_buff,然后发送给上层协议,上层会取掉相应的头部,然后将最终的数据发送给用户。
返回值: 0 发送成功,负值 发送失败。
dev_queue_xmit 函数太长,这里就不详细的分析了, dev_queue_xmit 函数最终是通过net_device_ops 操作集里面的 ndo_start_xmit 函数来完成最终发送了, ndo_start_xmit 就是网络驱动编写人员去实现的,整个流程如图所示:

netif_rx 函数
上层接收数据的话使用 netif_rx 函数,但是最原始的网络数据一般是通过轮询、中断或 NAPI的方式来接收。 netif_rx 函数定义在 net/core/dev.c 中,函数原型如下:
int netif_rx(struct sk_buff *skb)函数参数和返回值含义如下:
skb: 保存接收数据的 sk_buff。
返回值: NET_RX_SUCCESS 成功, NET_RX_DROP 数据包丢弃。
我们重点来看一下 sk_buff 这个结构体, sk_buff 是 Linux 网络重要的数据结构,用于管理接收或发送数据包, sk_buff 结构体定义在 include/linux/skbuff.h 中,结构体内容如下(由于结构体比较大,为了缩小篇幅只列出部分重要的内容):
1 struct sk_buff {
2 union {
3 struct {
4 /* These two members must be first. */
5 struct sk_buff *next;
6 struct sk_buff *prev;
7
8 union {
9 ktime_t tstamp;
10 struct skb_mstamp skb_mstamp;
11 };
12 };
13 struct rb_node rbnode; /* used in netem & tcp stack */
14 };
15 struct sock *sk;
16 struct net_device *dev;
17
18 /*
19 * This is the control buffer. It is free to use for every
20 * layer. Please put your private variables there. If you
21 * want to keep them across layers you have to do a skb_clone()
22 * first. This is owned by whoever has the skb queued ATM.
23 */
24 char cb[48] __aligned(8);
25
26 unsigned long _skb_refdst;
27 void (*destructor)(struct sk_buff *skb);
......
37 unsigned int len, data_len;
38 __u16 mac_len, hdr_len;
......
145 __be16 protocol;
146 __u16 transport_header;
147 __u16 network_header;
148 __u16 mac_header;
149
150 /* private: */
151 __u32 headers_end[0];
152 /* public: */
153
154 /* These elements must be at the end, see alloc_skb() for details. */
155 sk_buff_data_t tail;
156 sk_buff_data_t end;
157 unsigned char *head, *data;
158 unsigned int truesize;
159 atomic_t users;
160 };第 5~6 行: next 和 prev 分别指向下一个和前一个 sk_buff,构成一个双向链表。
第 9 行: tstamp 表示数据包接收时或准备发送时的时间戳。
第 15 行: sk 表示当前 sk_buff 所属的 Socket。
第 16 行: dev 表示当前 sk_buff 从哪个设备接收到或者发出的。
第 24 行: cb 为控制缓冲区,不管哪个层都可以自由使用此缓冲区,用于放置私有数据。
第 27 行: destructor 函数,当释放缓冲区的时候可以在此函数里面完成某些动作。
第 37 行: len 为实际的数据长度,包括主缓冲区中数据长度和分片中的数据长度。 data_len为数据长度,只计算分片中数据的长度。
第 38 行: mac_len 为连接层头部长度,也就是 MAC 头的长度。
第 145 行: protocol 协议。
第 146 行: transport_header 为传输层头部。
第 147 行: network_header 为网络层头部
第 148 行: mac_header 为链接层头部。
第 155 行: tail 指向实际数据的尾部。
第 156 行: end 指向缓冲区的尾部。
第 157 行: head 指向缓冲区的头部, data 指向实际数据的头部。 data 和 tail 指向实际数据的头部和尾部, head 和 end 指向缓冲区的头部和尾部。结构如图所示:
针对 sk_buff 内核提供了一系列的操作与管理函数,我们简单看一些常见的 API 函数:
分配 sk_buff
要使用 sk_buff 必须先分配,首先来看一下 alloc_skb 这个函数,此函数定义在include/linux/skbuff.h 中,函数原型如下:
static inline struct sk_buff *alloc_skb(unsigned int size, gfp_t priority)函数参数和返回值含义如下:
size: 要分配的大小,也就是 skb 数据段大小。
priority: 为 GFP MASK 宏,比如 GFP_KERNEL、 GFP_ATOMIC 等。
返回值: 分配成功的话就返回申请到的 sk_buff 首地址,失败的话就返回 NULL。
在网络设备驱动中常常使用 netdev_alloc_skb 来为某个设备申请一个用于接收的 skb_buff,此函数也定义在 include/linux/skbuff.h 中,函数原型如下:
static inline struct sk_buff *netdev_alloc_skb(struct net_device *dev, unsigned int length)函数参数和返回值含义如下:
dev: 要给哪个设备分配 sk_buff。
length: 要分配的大小。
返回值: 分配成功的话就返回申请到的 sk_buff 首地址,失败的话就返回 NULL。
释放 sk_buff
当使用完成以后就要释放掉 sk_buff,释放函数可以使用 kfree_skb,函数定义在include/linux/skbuff.c 中,函数原型如下:
void kfree_skb(struct sk_buff *skb)函数参数和返回值含义如下:
skb: 要释放的 sk_buff。
返回值: 无。
对于网络设备而言最好使用如下所示释放函数:
void dev_kfree_skb (struct sk_buff *skb)函数只要一个参数 skb,就是要释放的 sk_buff。
skb_put、 skb_push、 sbk_pull 和 skb_reserve
这四个函数用于变更 sk_buff,先来看一下 skb_put 函数,此函数用于在尾部扩展 skb_buff的数据区,也就将 skb_buff 的 tail 后移 n 个字节,从而导致 skb_buff 的 len 增加 n 个字节,原型如下:
unsigned char *skb_put(struct sk_buff *skb, unsigned int len)函数参数和返回值含义如下:
skb: 要操作的 sk_buff。
len:要增加多少个字节。
返回值: 扩展出来的那一段数据区首地址。
skb_put 操作之前和操作之后的数据区如图所示: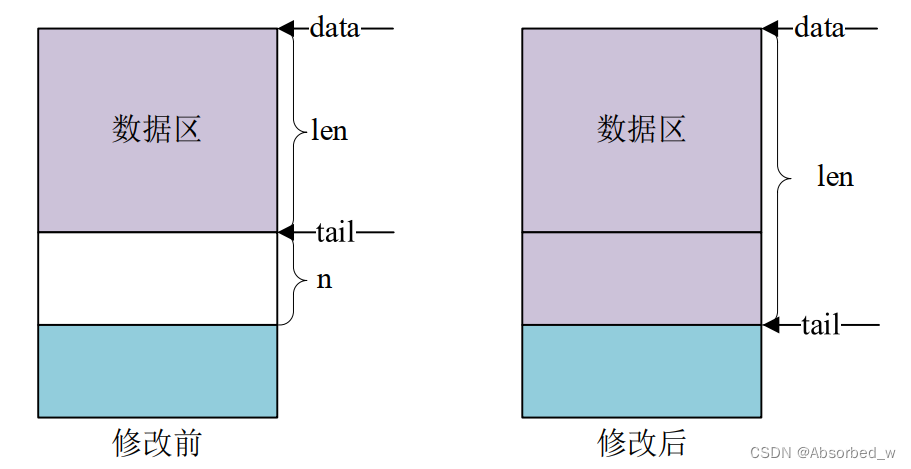
skb_push 函数用于在头部扩展 skb_buff 的数据区,函数原型如下所示:
unsigned char *skb_push(struct sk_buff *skb, unsigned int len)函数参数和返回值含义如下:
skb: 要操作的 sk_buff。
len:要增加多少个字节。
返回值: 扩展完成以后新的数据区首地址。
skb_push 操作之前和操作之后的数据区如图所示:
sbk_pull 函数用于从 sk_buff 的数据区起始位置删除数据,函数原型如下所示:
unsigned char *skb_pull(struct sk_buff *skb, unsigned int len)函数参数和返回值含义如下:
skb: 要操作的 sk_buff。
len:要删除的字节数。
返回值: 删除以后新的数据区首地址。
skb_pull 操作之前和操作之后的数据区如图所示: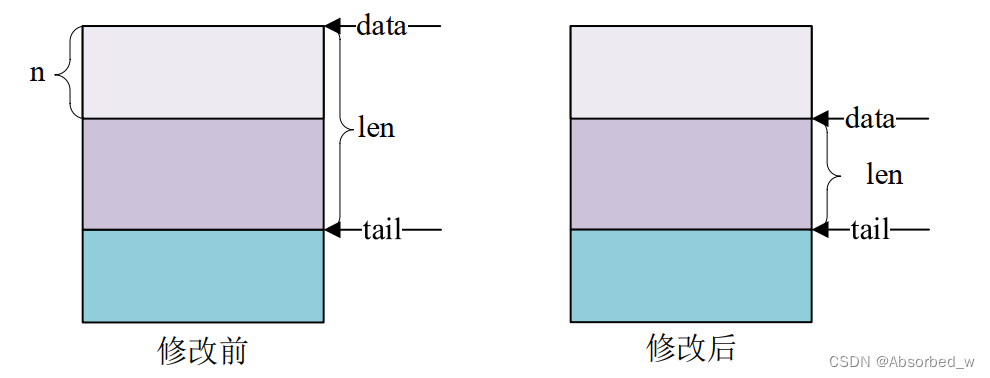
sbk_reserve 函数用于调整缓冲区的头部大小,方法很简单将 skb_buff 的 data 和 tail 同时后移 n 个字节即可,函数原型如下所示:
static inline void skb_reserve(struct sk_buff *skb, int len)函数参数和返回值含义如下:
skb: 要操作的 sk_buff。
len:要增加的缓冲区头部大小。
返回值: 无。
网络 NAPI 处理机制
如果玩过单片机的话应该都知道,像 IIC、 SPI、网络等这些通信接口,接收数据有两种方法:轮询或中断。 Linux 里面的网络数据接收也轮询和中断两种,中断的好处就是响应快,数据量小的时候处理及时,速度快,但是一旦当数据量大,而且都是短帧的时候会导致中断频繁发生,消耗大量的 CPU 处理时间在中断自身处理上。轮询恰好相反,响应没有中断及时,但是在处理大量数据的时候不需要消耗过多的 CPU 处理时间。 Linux 在这两个处理方式的基础上提出了另外一种网络数据接收的处理方法: NAPI(New API), NAPI 是一种高效的网络处理技术。
NAPI 的核心思想就是不全部采用中断来读取网络数据,而是采用中断来唤醒数据接收服务程序,在接收服务程序中采用 POLL 的方法来轮询处理数据。这种方法的好处就是可以提高短数据包的接收效率,减少中断处理的时间。目前 NAPI 已经在 Linux 的网络驱动中得到了大量的应用, NXP 官方编写的网络驱动都是采用的 NAPI 机制。
关于 NAPI 详细的处理过程本章节不讨论,本章节就简单讲解一下如何在驱动中使用 NAPI,Linux 内核使用结构体 napi_struct 表示 NAPI,在使用 NAPI 之前要先初始化一个 napi_struct 实例。
初始化 NAPI
首先要初始化一个 napi_struct 实例,使用 netif_napi_add 函数,此函数定义在 net/core/dev.c中,函数原型如下:
void netif_napi_add(struct net_device *dev,
struct napi_struct *napi,
int (*poll)(struct napi_struct *, int),
int weight)函数参数和返回值含义如下:
dev: 每个 NAPI 必须关联一个网络设备,此参数指定 NAPI 要关联的网络设备。
napi:要初始化的 NAPI 实例。
poll: NAPI 所使用的轮询函数,非常重要,一般在此轮询函数中完成网络数据接收的工作。
weight: NAPI 默认权重(weight),一般为 NAPI_POLL_WEIGHT。
返回值: 无。
删除 NAPI
如果要删除 NAPI,使用 netif_napi_del 函数即可,函数原型如下:
void netif_napi_del(struct napi_struct *napi)函数参数和返回值含义如下:
napi: 要删除的 NAPI。
返回值: 无。
使能 NAPI
初始化完 NAPI 以后,必须使能才能使用,使用函数 napi_enable,函数原型如下:
inline void napi_enable(struct napi_struct *n)函数参数和返回值含义如下:
n: 要使能的 NAPI。
返回值: 无。
关闭 NAPI
关闭 NAPI 使用 napi_disable 函数即可,函数原型如下:
void napi_disable(struct napi_struct *n)函数参数和返回值含义如下:
n: 要关闭的 NAPI。
返回值: 无。
检查 NAPI 是否可以进行调度
使用 napi_schedule_prep 函数检查 NAPI 是否可以进行调度,函数原型如下:
inline bool napi_schedule_prep(struct napi_struct *n)函数参数和返回值含义如下:
n: 要检查的 NAPI。
返回值: 如果可以调度就返回真,如果不可调度就返回假。
NAPI 调度
如果可以调度的话就进行调度,使用__napi_schedule 函数完成 NAPI 调度,函数原型如下:
void __napi_schedule(struct napi_struct *n)函数参数和返回值含义如下:
n: 要调度的 NAPI。
返回值: 无。
我们也可以使用 napi_schedule 函数来一次完成 napi_schedule_prep 和__napi_schedule 这两个函数的工作, napi_schedule 函数内容如下所示:
1 static inline void napi_schedule(struct napi_struct *n)
2 {
3 if (napi_schedule_prep(n))
4 __napi_schedule(n);
5 }从示例代码可以看出,napi_schedule函数就是对 napi_schedule_prep 和__napi_schedule 的简单封装,一次完成判断和调度。
NAPI 处理完成
NAPI 处理完成以后需要调用 napi_complete 函数来标记 NAPI 处理完成,函数原型如下:
inline void napi_complete(struct napi_struct *n)函数参数和返回值含义如下:
n: 处理完成的 NAPI。
返回值: 无。
I.MX6ULL 网络驱动简介
网络外设设备树
上一小节我们对 Linux 的网络驱动框架进行了一个简单的介绍,本节我们就来简单分析一下 I.MX6ULL 的网络驱动源码。 I.MX6ULL 有两个 10/100M 的网络 MAC 外设,因此 I.MX6ULL网络驱动主要就是这两个网络 MAC 外设的驱动。这两个外设的驱动都是一样的,我们分析其中一个就行了,首先肯定是设备树 , NXP 的 I.MX 系 列 SOC 网 络 绑 定 文 档 为
Documentation/devicetree/bindings/net/fsl-fec.txt,此绑定文档描述了 I.MX 系列 SOC 网络设备树节点的要求。
①、 必要属性
compatible: 这个肯定是必须的,一般是“fsl,<soc>-fec”,比如 I.MX6ULL 的 compatible 属性就是"fsl,imx6ul-fec",和"fsl,imx6q-fec"。
reg: SOC 网络外设寄存器地址范围。
interrupts:网络中断。
phy-mode: 网络所使用的 PHY 接口模式,是 MII 还是 RMII。
②、 可选属性
phy-reset-gpios: PHY 芯片的复位引脚。
phy-reset-duration: PHY 复位引脚复位持续时间,单位为毫秒。只有当设置了 phy-reset-gpios 属性此属性才会有效,如果不设置此属性的话 PHY 芯片复位引脚的复位持续时间默认为1 毫秒,数值不能大于 1000 毫秒,大于 1000 毫秒的话就会强制设置为 1 毫秒。
phy-supply: PHY 芯片的电源调节。
phy-handle:连接到此网络设备的 PHY 芯片句柄。
fsl,num-tx-queues: 此属性指定发送队列的数量,如果不指定的话默认为 1。
fsl,num-rx-queues: 此属性指定接收队列的数量,如果不指定的话默认为 2。
fsl,magic-packet: 此属性不用设置具体的值,直接将此属性名字写到设备树里面即可,表示支持硬件魔术帧唤醒。
fsl,wakeup_irq: 此属性设置唤醒中断索引。
stop-mode: 如果此属性存在的话表明 SOC 需要设置 GPR 位来请求停止模式。
③、可选子节点
mdio:可以设置名为“mdio”的子节点,此子节点用于指定网络外设所使用的 MDIO 总线,
主要做为 PHY 节点的容器,也就是在 mdio 子节点下指定 PHY 相关的属性信息,具体信息可以参考 PHY 的绑定文档 Documentation/devicetree/bindings/net/phy.txt。
PHY 节点相关属性内容如下:
interrupts:中断属性,可以不需要。
interrupt-parent: 中断控制器句柄,可以不需要。
reg: PHY 芯片地址,必须的!
compatible: 兼容性列表,一般为“ethernet-phy-ieee802.3-c22”或“ethernet-phy-ieee802.3-c45”,分别对应 IEEE802.3 的 22 簇和 45 簇,默认是 22 簇。也可以设置为其他值,如果 PHY的 ID 不知道的话可以 compatible 属性可以设置为“ethernet-phy-idAAAA.BBBB”, AAAA 和BBBB 的含义如下:
AAAA: PHY 的 16 位 ID 寄存器 1 值,也就是 OUI 的 bit3~18, 16 进制格式。
BBBB: PHY 的 16 位 ID 寄存器 2 值,也就是 OUI 的 bit19~24, 16 进制格式。
max-speed: PHY 支持的最高速度,比如 10、 100 或 1000。
打开 imx6ull.dtsi,找到如下 I.MX6ULL 的两个网络外设节点,如下所示:
1 fec1: ethernet@02188000 {
2 compatible = "fsl,imx6ul-fec", "fsl,imx6q-fec";
3 reg = <0x02188000 0x4000>;
4 interrupts = <GIC_SPI 118 IRQ_TYPE_LEVEL_HIGH>,
5 <GIC_SPI 119 IRQ_TYPE_LEVEL_HIGH>;
6 clocks = <&clks IMX6UL_CLK_ENET>,
7 <&clks IMX6UL_CLK_ENET_AHB>,
8 <&clks IMX6UL_CLK_ENET_PTP>,
9 <&clks IMX6UL_CLK_ENET_REF>,
10 <&clks IMX6UL_CLK_ENET_REF>;
11 clock-names = "ipg", "ahb", "ptp",
12 "enet_clk_ref", "enet_out";
13 stop-mode = <&gpr 0x10 3>;
14 fsl,num-tx-queues=<1>;
15 fsl,num-rx-queues=<1>;
16 fsl,magic-packet;
17 fsl,wakeup_irq = <0>;
18 status = "disabled";
19 };
20
21 fec2: ethernet@020b4000 {
22 compatible = "fsl,imx6ul-fec", "fsl,imx6q-fec";
23 reg = <0x020b4000 0x4000>;
24 interrupts = <GIC_SPI 120 IRQ_TYPE_LEVEL_HIGH>,
25 <GIC_SPI 121 IRQ_TYPE_LEVEL_HIGH>;
26 clocks = <&clks IMX6UL_CLK_ENET>,
27 <&clks IMX6UL_CLK_ENET_AHB>,
28 <&clks IMX6UL_CLK_ENET_PTP>,
29 <&clks IMX6UL_CLK_ENET2_REF_125M>,
30 <&clks IMX6UL_CLK_ENET2_REF_125M>;
31 clock-names = "ipg", "ahb", "ptp",
32 "enet_clk_ref", "enet_out";
33 stop-mode = <&gpr 0x10 4>;
34 fsl,num-tx-queues=<1>;
35 fsl,num-rx-queues=<1>;
36 fsl,magic-packet;
37 fsl,wakeup_irq = <0>;
38 status = "disabled";
39 };fec1 和 fec2 分别对应 I.MX6ULL 的 ENET1 和 ENET2,至于节点的具体属性就不分析了,上面在讲解绑定文档的时候就已经详细的讲过了。上述dts是 NXP 官方编写的,我们不需要去修改,但是只有以上配置是不能工作的,还需要根据实际情况添加或修改一些属性。打开 imx6ull-alientek-emmc.dts,找到如下内容:
1 &fec1 {
2 pinctrl-names = "default";
3 pinctrl-0 = <&pinctrl_enet1
4 &pinctrl_enet1_reset>;
5 phy-mode = "rmii";
6 phy-handle = <ðphy0>;
7 phy-reset-gpios = <&gpio5 7 GPIO_ACTIVE_LOW>;
8 phy-reset-duration = <200>;
9 status = "okay";
10 };
11
12 &fec2 {
13 pinctrl-names = "default";
14 pinctrl-0 = <&pinctrl_enet2
15 &pinctrl_enet2_reset>;
16 phy-mode = "rmii";
17 phy-handle = <ðphy1>;
18 phy-reset-gpios = <&gpio5 8 GPIO_ACTIVE_LOW>;
19 phy-reset-duration = <200>;
20 status = "okay";
21
22 mdio {
23 #address-cells = <1>;
24 #size-cells = <0>;
25
26 ethphy0: ethernet-phy@0 {
27 compatible = "ethernet-phy-ieee802.3-c22";
28 reg = <0>;
29 };
30
31 ethphy1: ethernet-phy@1 {
32 compatible = "ethernet-phy-ieee802.3-c22";
33 reg = <1>;
34 };
35 };
36 };示例代码是正点原子在移植 Linux 内核的时候已经根据 ALPHA 开发板修改后的,并不是 NXP 官方原版节点信息,所以会有一点出入,这个不要紧。
第 1~10 行: ENET1 网口的节点属性,第 3、 4 行设置 ENET1 所使用的引脚 pinctrl 节点信息,第 5 行设置网络对应的 PHY 芯片接口为 RMII,这个要根据实际的硬件来设置。第 6 行设
置 PHY 芯片的句柄为 ethphy0, MDIO 节点会设置 PHY 信息。其他的属性信息就很好理解了,基本已经在上面讲解绑定文档的时候说过了。
第 12~36 行: ENET2 网口的节点属性,基本和 ENET1 网口一致,区别就是多了第 22~35行的 mdio 子节点,前面讲解绑定文档的时候说了, mido 子节点用于描述 MIDO 总线,在此子
节点内会包含 PHY 节点信息。这里一共有两个 PHY 子节点: ethphy0 和 ethphy1,分别对应ENET1 和 ENET2 的 PHY 芯片。比如第 26 行的“ethphy0: ethernet-phy@0”就是 ENET1 的 PHY
节点名字,“@”后面的 0 就是此 PHY 芯片的芯片地址, reg 属性也是描述 PHY 芯片地址的,这点和 IIC 设备节点很像。其他地方就没什么好多的了,绑定文档已经讲解的很清楚了。
最后就是设备树中网络相关引脚的描述,打开 imx6ull-alientek-emmc.dts,找到如下所示内容:
1 pinctrl_enet1: enet1grp {
2 fsl,pins = <
3 MX6UL_PAD_ENET1_RX_EN__ENET1_RX_EN 0x1b0b0
4 MX6UL_PAD_ENET1_RX_ER__ENET1_RX_ER 0x1b0b0
5 MX6UL_PAD_ENET1_RX_DATA0__ENET1_RDATA00 0x1b0b0
6 MX6UL_PAD_ENET1_RX_DATA1__ENET1_RDATA01 0x1b0b0
7 MX6UL_PAD_ENET1_TX_EN__ENET1_TX_EN 0x1b0b0
8 MX6UL_PAD_ENET1_TX_DATA0__ENET1_TDATA00 0x1b0b0
9 MX6UL_PAD_ENET1_TX_DATA1__ENET1_TDATA01 0x1b0b0
10 MX6UL_PAD_ENET1_TX_CLK__ENET1_REF_CLK1 0x4001b009
11 >;
12 };
13
14 pinctrl_enet2: enet2grp {
15 fsl,pins = <
16 MX6UL_PAD_GPIO1_IO07__ENET2_MDC 0x1b0b0
17 MX6UL_PAD_GPIO1_IO06__ENET2_MDIO 0x1b0b0
18 MX6UL_PAD_ENET2_RX_EN__ENET2_RX_EN 0x1b0b0
19 MX6UL_PAD_ENET2_RX_ER__ENET2_RX_ER 0x1b0b0
20 MX6UL_PAD_ENET2_RX_DATA0__ENET2_RDATA00 0x1b0b0
21 MX6UL_PAD_ENET2_RX_DATA1__ENET2_RDATA01 0x1b0b0
22 MX6UL_PAD_ENET2_TX_EN__ENET2_TX_EN 0x1b0b0
23 MX6UL_PAD_ENET2_TX_DATA0__ENET2_TDATA00 0x1b0b0
24 MX6UL_PAD_ENET2_TX_DATA1__ENET2_TDATA01 0x1b0b0
25 MX6UL_PAD_ENET2_TX_CLK__ENET2_REF_CLK2 0x4001b009
26 >;
27 };
28
29 /*enet1 reset zuozhongkai*/
30 pinctrl_enet1_reset: enet1resetgrp {
31 fsl,pins = <
32 /* used for enet1 reset */
33 MX6ULL_PAD_SNVS_TAMPER7__GPIO5_IO07 0x10B0
34 >;
35 };
36
37 /*enet2 reset zuozhongkai*/
38 pinctrl_enet2_reset: enet2resetgrp {
39 fsl,pins = <
40 /* used for enet2 reset */
41 MX6ULL_PAD_SNVS_TAMPER8__GPIO5_IO08 0x10B0
42 >;
43 };pinctrl_enet1 和 pinctrl_enet1_reset 是 ENET1 所有的 IO 引脚 pinctrl 信息,之所以分两部分主 要 是 因 为 ENET1 的 复 位 引 脚 为 GPIO5_IO07 , 而 GPIO5_IO07 对 应 的 引 脚 就 是
SNVS_TAMPER7,要放到 iomuxc_snvs 节点下,所以就分成了两部分。注意第 16、 17 行,这两行设置 GPIO1_IO07 和 GPIO1_IO06 为 ENET2 的 MDC 和 MDIO,大家可能会疑问,为什么不将其设置为 ENET1 的 MDC 和 MDIO 呢?经过正点原子实测,在开启两个网口的情况下,将 GPIO1_IO07 和 GPIO1_IO06 设置为 ENET1 的 MDC 和 MDIO 会对导致网络工作不正常。前面说了,一个 MDIO 接口可以管理 32 个 PHY,所以设置 ENET2 的 MDC 和MDIO 以后也是可以管理 ENET1 上的 PHY 芯片。
I.MX6ULL 网络驱动源码简析
fec_probe 函数简析
对于 I.MX6ULL 而言网络驱动主要分两部分: I.MX6ULL 网络外设驱动以及 PHY 芯片驱动,网络外设驱动是 NXP 编写的, PHY 芯片有通用驱动文件, 有些 PHY 芯片厂商还会针对自己的芯片编写对应的 PHY 驱动。总体来说, SOC 内置网络 MAC+外置 PHY 芯片这种方案我们是不需要编写什么驱动的,基本可以直接使用。但是为了学习,我们还是要简单分析一下具体的网络驱动编写过程。
首先来看一下 I.MX6ULL 的网络控制器部分驱动,从dts中可以看出,compatible 属性有两个值“fsl,imx6ul-fec”和“fsl,imx6q-fec”,通过在 linux 内核源码中搜索这两个字符串即可找到对应的驱动文件,驱动文件为 drivers/net/ethernet/freescale/fec_main.c,打开fec_main.c,找到如下所示内容:
1 static const struct of_device_id fec_dt_ids[] = {
2 { .compatible = "fsl,imx25-fec", .data = &fec_devtype[IMX25_FEC], },
3 { .compatible = "fsl,imx27-fec", .data = &fec_devtype[IMX27_FEC], },
4 { .compatible = "fsl,imx28-fec", .data = &fec_devtype[IMX28_FEC], },
5 { .compatible = "fsl,imx6q-fec", .data = &fec_devtype[IMX6Q_FEC], },
6 { .compatible = "fsl,mvf600-fec", .data = &fec_devtype[MVF600_FEC], },
7 { .compatible = "fsl,imx6sx-fec", .data = &fec_devtype[IMX6SX_FEC], },
8 { .compatible = "fsl,imx6ul-fec", .data = &fec_devtype[IMX6UL_FEC], },
9 { /* sentinel */ }
10 };
11
12 static struct platform_driver fec_driver = {
13 .driver = {
14 .name = DRIVER_NAME,
15 .pm = &fec_pm_ops,
16 .of_match_table = fec_dt_ids,
17 },
18 .id_table = fec_devtype,
19 .probe = fec_probe,
20 .remove = fec_drv_remove,
21 };第 8 行,匹配表包含“fsl,imx6ul-fec”,因此设备树和驱动匹配上,当匹配成功以后第 19 行的 fec_probe 函数就会执行,我们简单分析一下 fec_probe 函数,函数内容如下:
1 static int fec_probe(struct platform_device *pdev)
2 {
3 struct fec_enet_private *fep;
4 struct fec_platform_data *pdata;
5 struct net_device *ndev;
6 int i, irq, ret = 0;
7 struct resource *r;
8 const struct of_device_id *of_id;
9 static int dev_id;
10 struct device_node *np = pdev->dev.of_node, *phy_node;
11 int num_tx_qs;
12 int num_rx_qs;
13
14 fec_enet_get_queue_num(pdev, &num_tx_qs, &num_rx_qs);
15
16 /* Init network device */
17 ndev = alloc_etherdev_mqs(sizeof(struct fec_enet_private),
18 num_tx_qs, num_rx_qs);
19 if (!ndev)
20 return -ENOMEM;
21
22 SET_NETDEV_DEV(ndev, &pdev->dev);
23
24 /* setup board info structure */
25 fep = netdev_priv(ndev);
26
27 of_id = of_match_device(fec_dt_ids, &pdev->dev);
28 if (of_id)
29 pdev->id_entry = of_id->data;
30 fep->quirks = pdev->id_entry->driver_data;
31
32 fep->netdev = ndev;
33 fep->num_rx_queues = num_rx_qs;
34 fep->num_tx_queues = num_tx_qs;
35
36 #if !defined(CONFIG_M5272)
37 /* default enable pause frame auto negotiation */
38 if (fep->quirks & FEC_QUIRK_HAS_GBIT)
39 fep->pause_flag |= FEC_PAUSE_FLAG_AUTONEG;
40 #endif
41
42 /* Select default pin state */
43 pinctrl_pm_select_default_state(&pdev->dev);
44
45 r = platform_get_resource(pdev, IORESOURCE_MEM, 0);
46 fep->hwp = devm_ioremap_resource(&pdev->dev, r);
47 if (IS_ERR(fep->hwp)) {
48 ret = PTR_ERR(fep->hwp);
49 goto failed_ioremap;
50 }
51
52 fep->pdev = pdev;
53 fep->dev_id = dev_id++;
54
55 platform_set_drvdata(pdev, ndev);
56
57 fec_enet_of_parse_stop_mode(pdev);
58
59 if (of_get_property(np, "fsl,magic-packet", NULL))
60 fep->wol_flag |= FEC_WOL_HAS_MAGIC_PACKET;
61
62 phy_node = of_parse_phandle(np, "phy-handle", 0);
63 if (!phy_node && of_phy_is_fixed_link(np)) {
64 ret = of_phy_register_fixed_link(np);
65 if (ret < 0) {
66 dev_err(&pdev->dev,
67 "broken fixed-link specification\n");
68 goto failed_phy;
69 }
70 phy_node = of_node_get(np);
71 }
72 fep->phy_node = phy_node;
73
74 ret = of_get_phy_mode(pdev->dev.of_node);
75 if (ret < 0) {
76 pdata = dev_get_platdata(&pdev->dev);
77 if (pdata)
78 fep->phy_interface = pdata->phy;
79 else
80 fep->phy_interface = PHY_INTERFACE_MODE_MII;
81 } else {
82 fep->phy_interface = ret;
83 }
84
85 fep->clk_ipg = devm_clk_get(&pdev->dev, "ipg");
86 if (IS_ERR(fep->clk_ipg)) {
87 ret = PTR_ERR(fep->clk_ipg);
88 goto failed_clk;
89 }
90
91 fep->clk_ahb = devm_clk_get(&pdev->dev, "ahb");
92 if (IS_ERR(fep->clk_ahb)) {
93 ret = PTR_ERR(fep->clk_ahb);
94 goto failed_clk;
95 }
96
97 fep->itr_clk_rate = clk_get_rate(fep->clk_ahb);
98
99 /* enet_out is optional, depends on board */
100 fep->clk_enet_out = devm_clk_get(&pdev->dev, "enet_out");
101 if (IS_ERR(fep->clk_enet_out))
102 fep->clk_enet_out = NULL;
103
104 fep->ptp_clk_on = false;
105 mutex_init(&fep->ptp_clk_mutex);
106
107 /* clk_ref is optional, depends on board */
108 fep->clk_ref = devm_clk_get(&pdev->dev, "enet_clk_ref");
109 if (IS_ERR(fep->clk_ref))
110 fep->clk_ref = NULL;
111
112 fep->bufdesc_ex = fep->quirks & FEC_QUIRK_HAS_BUFDESC_EX;
113 fep->clk_ptp = devm_clk_get(&pdev->dev, "ptp");
114 if (IS_ERR(fep->clk_ptp)) {
115 fep->clk_ptp = NULL;
116 fep->bufdesc_ex = false;
117 }
118
119 pm_runtime_enable(&pdev->dev);
120 ret = fec_enet_clk_enable(ndev, true);
121 if (ret)
122 goto failed_clk;
123
124 fep->reg_phy = devm_regulator_get(&pdev->dev, "phy");
125 if (!IS_ERR(fep->reg_phy)) {
126 ret = regulator_enable(fep->reg_phy);
127 if (ret) {
128 dev_err(&pdev->dev,
129 "Failed to enable phy regulator: %d\n", ret);
130 goto failed_regulator;
131 }
132 } else {
133 fep->reg_phy = NULL;
134 }
135
136 fec_reset_phy(pdev);
137
138 if (fep->bufdesc_ex)
139 fec_ptp_init(pdev);
140
141 ret = fec_enet_init(ndev);
142 if (ret)
143 goto failed_init;
144
145 for (i = 0; i < FEC_IRQ_NUM; i++) {
146 irq = platform_get_irq(pdev, i);
147 if (irq < 0) {
148 if (i)
149 break;
150 ret = irq;
151 goto failed_irq;
152 }
153 ret = devm_request_irq(&pdev->dev, irq, fec_enet_interrupt,
154 0, pdev->name, ndev);
155 if (ret)
156 goto failed_irq;
157
158 fep->irq[i] = irq;
159 }
160
161 ret = of_property_read_u32(np, "fsl,wakeup_irq", &irq);
162 if (!ret && irq < FEC_IRQ_NUM)
163 fep->wake_irq = fep->irq[irq];
164 else
165 fep->wake_irq = fep->irq[0];
166
167 init_completion(&fep->mdio_done);
168 ret = fec_enet_mii_init(pdev);
169 if (ret)
170 goto failed_mii_init;
171
172 /* Carrier starts down, phylib will bring it up */
173 netif_carrier_off(ndev);
174 fec_enet_clk_enable(ndev, false);
175 pinctrl_pm_select_sleep_state(&pdev->dev);
176
177 ret = register_netdev(ndev);
178 if (ret)
179 goto failed_register;
180
181 device_init_wakeup(&ndev->dev, fep->wol_flag &
182 FEC_WOL_HAS_MAGIC_PACKET);
183
184 if (fep->bufdesc_ex && fep->ptp_clock)
185 netdev_info(ndev, "registered PHC device %d\n", fep->dev_id);
186
187 fep->rx_copybreak = COPYBREAK_DEFAULT;
188 INIT_WORK(&fep->tx_timeout_work, fec_enet_timeout_work);
189 return 0;
......
206 return ret;
207 }第14行,使用fec_enet_get_queue_num 函数来获取设备树中的“ fsl,num-tx-queues”和“fsl,num-rx-queues”这两个属性值,也就是发送队列和接收队列的大小, 设备树中这两个属性都设置为1。
第 17 行,使用 alloc_etherdev_mqs 函数申请 net_device。
第 25 行, 获取 net_device 中私有数据内存首地址, net_device 中的私有数据用来存放I.MX6ULL 网络设备结构体,此结构体为 fec_enet_private。
第 30 行, 接下来所有以“fep->” 开头的代码行就是初始化网络设备结构体各个成员变量,结构体类型为 fec_enet_privatede,这个结构体是 NXP 自己定义的。
第 45 行,获取设备树中 I.MX6ULL 网络外设(ENET)相关寄存器起始地址, ENET1 的寄存器起始地址 0X02188000, ENET2 的寄存器起始地址 0X20B4000。
第 46 行,对第 45 行获取到的地址做虚拟地址转换,转换后的 ENET 虚拟寄存器起始地址保存在 fep 的 hwp 成员中。
第 57 行,使用 fec_enet_of_parse_stop_mode 函数解析设备树中关于 ENET 的停止模式属性值,属性名字为“stop-mode”,我们没有用到。
第 59 行,从设备树查找“fsl,magic-packet”属性是否存在,如果存在的话就说明有魔术包,有魔术包的话就将 fep 的 wol_flag 成员与 FEC_WOL_HAS_MAGIC_PACKET 进行或运算,也就是在 wol_flag 中做登记,登记支持魔术包。
第 62 行,获取“phy-handle”属性的值, phy-handle 属性指定了 I.MX6ULL 网络外设所对应获取 PHY 的设备节点。在设备树的 fec1 和 fec2 两个节点中 phy-handle 属性值分别为:
phy-handle = <ðphy0>;
phy-handle = <ðphy1>;而 ethphy0 和 ethphy1 都定义在 mdio 子节点下,内容如下所示:
mdio {
#address-cells = <1>;
#size-cells = <0>;
ethphy0: ethernet-phy@0 {
compatible = "ethernet-phy-ieee802.3-c22";
reg = <0>;
};
ethphy1: ethernet-phy@1 {
compatible = "ethernet-phy-ieee802.3-c22";
reg = <1>;
};
};可以看出 ethphy0 和 ethphy1 都是与 MDIO 相关的,而 MDIO 接口是配置 PHY 芯片的,通过一个 MDIO 接口可以配置多个 PHY 芯片,不同的 PHY 芯片通过不同的地址进行区别。正点原子 ALPHA 开发板中 ENET 的 PHY 地址为 0X00, ENET2 的 PHY 地址为 0X01。这两个 PHY地址要通过设备树告诉 Linux 系统, ethphy0 和 ethphy1 节点中的 reg 属性也是 PHY 地址,如果我们要更换其他的网络PHY 芯片,第一步就是要修改设备树中的 PHY 地址。
第 74 行,获取 PHY 工作模式,函数 of_get_phy_mode 会读取属性 phy-mode 的值,” phymode”中保存了 PHY 的工作方式, 即 PHY 是 RMII 还是 MII, IMX6ULL 中的 PHY 工作在RMII 模式(可以由硬件配置,也可软件修改,详情查看使用phy的手册)。
第 85、 91、 100、 108 和 113 行,分别获取时钟 ipg、 ahb、 enet_out、 enet_clk_ref 和 ptp,对应结构体 fec_enet_private 有如下成员:
struct clk *clk_ipg;
struct clk *clk_ahb;
struct clk *clk_ref;
struct clk *clk_enet_out;
struct clk *clk_ptp;第 120 行,使能时钟。
第 136 行,调用函数 fec_reset_phy 复位 PHY。
第 141 行,调用函数 fec_enet_init()初始化 enet,此函数会分配队列、申请 dma、设置 MAC地址,初始化 net_device 的 netdev_ops 和 ethtool_ops 成员,如图所示:
从上图可以看出, net_device 的 netdev_ops 和 ethtool_ops 变量分别初始化成了fec_netdev_ops 和 fec_enet_ethtool_ops。 fec_enet_init 函数还会调用 netif_napi_add 来设置 poll 函数,说明 NXP 官方编写的此网络驱动是 NAPI 兼容驱动,如图所示:
从上图可以看出,通过 netif_napi_add 函数向网卡添加了一个 napi 实例,使用 NAPI驱动要提供一个 poll 函数来轮询处理接收数据,此处的 poll 函数为 fec_enet_rx_napi,后面分析网络数据接收处理流程的时候详细讲解此函数。最后, fec_enet_init 函数会设置 IMX6ULL 网络外设相关硬件寄存器。
第 146 行,从设备树中获取中断号。
第 153 行,申请中断,中断处理函数为 fec_enet_interrupt,重点!后面会分析此函数。
第 161 行,从设备树中获取属性“fsl,wakeup_irq”的值,也就是唤醒中断,
第 167 行,初始化完成量 completion,用于一个执行单元等待另一个执行单元执行完某事。
第 168 行,函数 fec_enet_mii_init 完成 MII/RMII 接口的初始化,此函数重点是图中的两行代码:
mii_bus 下的 read 和 write 这两个成员变量分别是读/写 PHY 寄存器的操作函数,这里设置为 fec_enet_mdio_read 和 fec_enet_mdio_write,这两个函数就是 I.MX 系列 SOC 读写 PHY 内部
寄存器的函数,读取或者配置 PHY 寄存器都会通过这两个 MDIO 总线函数完成。fec_enet_mii_init 函数最终会向 Linux 内核注册 MIDO 总线,相关代码如下所示:
1 node = of_get_child_by_name(pdev->dev.of_node, "mdio");
2 if (node) {
3 err = of_mdiobus_register(fep->mii_bus, node);
4 of_node_put(node);
5 } else {
6 err = mdiobus_register(fep->mii_bus);
7 }上述代码中第 1 行就是从设备树中获取 mdio 节点,如果节点存在的话就会通过 of_mdiobus_register 或者 mdiobus_register 来向内核注册 MDIO 总线,如果采用设备树的话就使用 of_mdiobus_register 来注册 MDIO 总线,否则就使用 mdiobus_register 函数。
接着分析 fec_probe 函数。
第 173 行,先调用函数 netif_carrier_off 通知内核,先关闭链路, phylib 会打开。
第 174 行,调用函数 fec_enet_clk_enable 使能网络相关时钟。
第 177 行,调用函数 register_netdev 注册 net_device!
fec_drv_remove 函数简析
卸载 I.MX6ULL 网络驱动的时候 fec_drv_remove 函数就会执行,函数内容如下所示:
1 static int fec_drv_remove(struct platform_device *pdev)
2 {
3 struct net_device *ndev = platform_get_drvdata(pdev);
4 struct fec_enet_private *fep = netdev_priv(ndev);
5
6 cancel_delayed_work_sync(&fep->time_keep);
7 cancel_work_sync(&fep->tx_timeout_work);
8 unregister_netdev(ndev);
9 fec_enet_mii_remove(fep);
10 if (fep->reg_phy)
11 regulator_disable(fep->reg_phy);
12 if (fep->ptp_clock)
13 ptp_clock_unregister(fep->ptp_clock);
14 of_node_put(fep->phy_node);
15 free_netdev(ndev);
16
17 return 0;
18 }MDIO 总线注册
MDIO 我们讲了很多次了,就是用来管理 PHY 芯片的,分为 MDIO 和 MDC 两根线, Linux内核专门为 MDIO 准备一个总线,叫做 MDIO 总线,采用 mii_bus 结构体表示,定义在
include/linux/phy.h 文件中, mii_bus 结构体如下所示:
1 struct mii_bus {
2 const char *name;
3 char id[MII_BUS_ID_SIZE];
4 void *priv;
5 int (*read)(struct mii_bus *bus, int phy_id, int regnum);
6 int (*write)(struct mii_bus *bus, int phy_id, int regnum, u16 val);
7 int (*reset)(struct mii_bus *bus);
8
9 /*
10 * A lock to ensure that only one thing can read/write
11 * the MDIO bus at a time
12 */
13 struct mutex mdio_lock;
14
15 struct device *parent;
16 enum {
17 MDIOBUS_ALLOCATED = 1,
18 MDIOBUS_REGISTERED,
19 MDIOBUS_UNREGISTERED,
20 MDIOBUS_RELEASED,
21 } state;
22 struct device dev;
23
24 /* list of all PHYs on bus */
25 struct phy_device *phy_map[PHY_MAX_ADDR];
26
27 /* PHY addresses to be ignored when probing */
28 u32 phy_mask;
29
30 /*
31 * Pointer to an array of interrupts, each PHY's
32 * interrupt at the index matching its address
33 */
34 int *irq;
35 };重点是第 5、 6 两行的 read 和 write 函数,这两个函数就是读/些 PHY 芯片的操作函数,不同的 SOC 其 MDIO 主控部分是不一样的,因此需要驱动编写人员去编写。我们前面在分析fec_probe 函数的时候已经讲过了, fec_probe 函数会调用 fec_enet_mii_init 函数完成 MII 接口的初始化,其中就包括初始化 mii_bus 下的 read 和 write 这两个函数。最终通过 of_mdiobus_register或者 mdiobus_register 函数将初始化以后的 mii_bus 注册到 Linux 内核, of_mdiobus_register 函数其实最终也是调用的 mdiobus_register 函数来完成 mii_bus 注册的。 of_mdiobus_register 函数内容如下(限于篇幅,有省略):
1 int of_mdiobus_register(struct mii_bus *mdio, struct device_node *np)
2 {
3 struct device_node *child;
4 const __be32 *paddr;
5 bool scanphys = false;
6 int addr, rc, i;
7
8 /* Mask out all PHYs from auto probing. Instead the PHYs listed
9 * in the device tree are populated after the bus has been *registered */
10 mdio->phy_mask = ~0;
11
12 /* Clear all the IRQ properties */
13 if (mdio->irq)
14 for (i=0; i<PHY_MAX_ADDR; i++)
15 mdio->irq[i] = PHY_POLL;
16
17 mdio->dev.of_node = np;
18
19 /* Register the MDIO bus */
20 rc = mdiobus_register(mdio);
21 if (rc)
22 return rc;
23
24 /* Loop over the child nodes and register a phy_device for each
one */
25 for_each_available_child_of_node(np, child) {
26 addr = of_mdio_parse_addr(&mdio->dev, child);
27 if (addr < 0) {
28 scanphys = true;
29 continue;
30 }
31
32 rc = of_mdiobus_register_phy(mdio, child, addr);
33 if (rc)
34 continue;
35 }
36
37 if (!scanphys)
38 return 0;
39
......
62 return 0;
63 }第 20 行,调用 mdiobus_register 函数来向 Linux 内核注册 mdio 总线!
第 25 行, 轮询 mdio 节点下的所有子节点,比如dts中的“ethphy0: ethernetphy@0”和“ethphy1: ethernet-phy@1”这两个子节点,这两个子节点描述的是 PHY 芯片信息。
第 26 行,提取设备树子节点中 PHY 地址,也就是 ethphy0: ethernet-phy@0”和“ethphy1:ethernet-phy@1”这两个子节点对应的 PHY 芯片地址,分别为 0 和 1。
第 32 行, 调用 of_mdiobus_register_phy 函数向 Linux 内核注册 phy。
简单总结一下, of_mdiobus_register 函数有两个主要的功能,一个是通过 mdiobus_register函数向 Linux 内核注册mdio bus,另一个就是通过 of_mdiobus_register_phy 函数向内核注册 PHY。
接下来简单分析一下 of_mdiobus_register_phy 函数,看看是如何向 Linux 内核注册 PHY 设备的, of_mdiobus_register_phy 函数内容如下所示:
1 static int of_mdiobus_register_phy(struct mii_bus *mdio, struct device_node *child,
2 u32 addr)
3 {
4 struct phy_device *phy;
5 bool is_c45;
6 int rc;
7 u32 phy_id;
8
9 is_c45 = of_device_is_compatible(child,
10 "ethernet-phy-ieee802.3-c45");
11
12 if (!is_c45 && !of_get_phy_id(child, &phy_id))
13 phy = phy_device_create(mdio, addr, phy_id, 0, NULL);
14 else
15 phy = get_phy_device(mdio, addr, is_c45);
16 if (!phy || IS_ERR(phy))
17 return 1;
18
19 rc = irq_of_parse_and_map(child, 0);
20 if (rc > 0) {
21 phy->irq = rc;
22 if (mdio->irq)
23 mdio->irq[addr] = rc;
24 } else {
25 if (mdio->irq)
26 phy->irq = mdio->irq[addr];
27 }
28
29 /* Associate the OF node with the device structure so it
30 * can be looked up later */
31 of_node_get(child);
32 phy->dev.of_node = child;
33
34 /* All data is now stored in the phy struct;
35 * register it */
36 rc = phy_device_register(phy);
37 if (rc) {
38 phy_device_free(phy);
39 of_node_put(child);
40 return 1;
41 }
42
43 dev_dbg(&mdio->dev, "registered phy %s at address %i\n",
44 child->name, addr);
45
46 return 0;
47 }第 9 行,使用函数 of_device_is_compatible 检查 PHY 节点的 compatible 属性是否为“ethernetphy-ieee802.3-c45”,如果是的话要做其他的处理,本章节我们设置的 compatible 属性为“ethernetphy-ieee802.3-c22”。
第 15 行,调用 get_phy_device 函数获取 PHY 设备,此函数里面会调用 phy_device_create来创建一个 phy_device 设备并返回。
第 19 行,获取 PHY 芯片的中断信息,本章节并未用到。
第 36 行,调用 phy_device_register 函数向 Linux 内核注册 PHY 设备。
从上面的分析可以看出,向 Linux 内核注册 MDIO 总线的时候也会同时向 Linux 内核注册PHY 设备,流程如图示:
注册 MIDO 总线的时候会从设备树中查找 PHY 设备,然后通过 phy_device_register 函数向内核注册 PHY 设备。
fec_netdev_ops 操作集
fec_probe 函数设置了网卡驱动的 net_dev_ops 操作集为 fec_netdev_ops, fec_netdev_ops 内容如下:
1 static const struct net_device_ops fec_netdev_ops = {
2 .ndo_open = fec_enet_open,
3 .ndo_stop = fec_enet_close,
4 .ndo_start_xmit = fec_enet_start_xmit,
5 .ndo_select_queue = fec_enet_select_queue,
6 .ndo_set_rx_mode = set_multicast_list,
7 .ndo_change_mtu = eth_change_mtu,
8 .ndo_validate_addr = eth_validate_addr,
9 .ndo_tx_timeout = fec_timeout,
10 .ndo_set_mac_address = fec_set_mac_address,
11 .ndo_do_ioctl = fec_enet_ioctl,
12 #ifdef CONFIG_NET_POLL_CONTROLLER
13 .ndo_poll_controller = fec_poll_controller,
14 #endif
15 .ndo_set_features = fec_set_features,
16 };fec_enet_open 函数
打开一个网卡的时候 fec_enet_open 函数就会执行,函数源码如下所示(限于篇幅原因,有省略):
1 static int fec_enet_open(struct net_device *ndev)
2 {
3 struct fec_enet_private *fep = netdev_priv(ndev);
4 const struct platform_device_id *id_entry =
5 platform_get_device_id(fep->pdev);
6 int ret;
7
8 pinctrl_pm_select_default_state(&fep->pdev->dev);
9 ret = fec_enet_clk_enable(ndev, true);
10 if (ret)
11 return ret;
12
13 /* I should reset the ring buffers here, but I don't yet know
14 * a simple way to do that.
15 */
16
17 ret = fec_enet_alloc_buffers(ndev);
18 if (ret)
19 goto err_enet_alloc;
20
21 /* Init MAC prior to mii bus probe */
22 fec_restart(ndev);
23
24 /* Probe and connect to PHY when open the interface */
25 ret = fec_enet_mii_probe(ndev);
26 if (ret)
27 goto err_enet_mii_probe;
28
29 napi_enable(&fep->napi);
30 phy_start(fep->phy_dev);
31 netif_tx_start_all_queues(ndev);
32
......
47
48 return 0;
49
50 err_enet_mii_probe:
51 fec_enet_free_buffers(ndev);
52 err_enet_alloc:
53 fep->miibus_up_failed = true;
54 if (!fep->mii_bus_share)
55 pinctrl_pm_select_sleep_state(&fep->pdev->dev);
56 return ret;
57 }第 9 行,调用 fec_enet_clk_enable 函数使能 enet 时钟。
第 17 行,调用 fec_enet_alloc_buffers 函数申请环形缓冲区 buffer,此函数里面会调用fec_enet_alloc_rxq_buffers 和 fec_enet_alloc_txq_buffers 这两个函数分别实现发送队列和接收队列缓冲区的申请。
第 22 行,重启网络,一般连接状态改变、传输超时或者配置网络的时候都会调用 fec_restart函数。
第 25 行,打开网卡的时候调用 fec_enet_mii_probe 函数来探测并连接对应的 PHY 设备。
第 29 行,调用 napi_enable 函数使能 NAPI 调度。
第 30 行,调用 phy_start 函数开启 PHY 设备。
第 31 行,调用 netif_tx_start_all_queues 函数来激活发送队列。
fec_enet_close 函数
关闭网卡的时候 fec_enet_close 函数就会执行,函数内容如下:
1 static int fec_enet_close(struct net_device *ndev)
2 {
3 struct fec_enet_private *fep = netdev_priv(ndev);
4
5 phy_stop(fep->phy_dev);
6
7 if (netif_device_present(ndev)) {
8 napi_disable(&fep->napi);
9 netif_tx_disable(ndev);
10 fec_stop(ndev);
11 }
12
13 phy_disconnect(fep->phy_dev);
14 fep->phy_dev = NULL;
15
16 fec_enet_clk_enable(ndev, false);
17 pm_qos_remove_request(&fep->pm_qos_req);
18 pinctrl_pm_select_sleep_state(&fep->pdev->dev);
19 pm_runtime_put_sync_suspend(ndev->dev.parent);
20 fec_enet_free_buffers(ndev);
21
22 return 0;
23 }第 5 行,调用 phy_stop 函数停止 PHY 设备。
第 8 行,调用 napi_disable 函数关闭 NAPI 调度。
第 9 行,调用 netif_tx_disable 函数关闭 NAPI 的发送队列。
第 10 行,调用 fec_stop 函数关闭 I.MX6ULL 的 ENET 外设。
第 13 行,调用 phy_disconnect 函数断开与 PHY 设备的连接。
第 16 行,调用 fec_enet_clk_enable 函数关闭 ENET 外设时钟。
第 20 行,调用 fec_enet_free_buffers 函数释放发送和接收的环形缓冲区内存。
fec_enet_start_xmit 函数
I.MX6ULL 的网络数据发送是通过 fec_enet_start_xmit 函数来完成的,这个函数将上层传递过来的 sk_buff 中的数据通过硬件发送出去, 函数源码如下:
1 static netdev_tx_t fec_enet_start_xmit(struct sk_buff *skb, struct net_device *ndev)
2 {
3 struct fec_enet_private *fep = netdev_priv(ndev);
4 int entries_free;
5 unsigned short queue;
6 struct fec_enet_priv_tx_q *txq;
7 struct netdev_queue *nq;
8 int ret;
9
10 queue = skb_get_queue_mapping(skb);
11 txq = fep->tx_queue[queue];
12 nq = netdev_get_tx_queue(ndev, queue);
13
14 if (skb_is_gso(skb))
15 ret = fec_enet_txq_submit_tso(txq, skb, ndev);
16 else
17 ret = fec_enet_txq_submit_skb(txq, skb, ndev);
18 if (ret)
19 return ret;
20
21 entries_free = fec_enet_get_free_txdesc_num(fep, txq);
22 if (entries_free <= txq->tx_stop_threshold)
23 netif_tx_stop_queue(nq);
24
25 return NETDEV_TX_OK;
26 }此函数的参数第一个参数 skb 就是上层应用传递下来的要发送的网络数据,第二个参数ndev 就是要发送数据的设备。
第 14 行,判断 skb 是否为 GSO(Generic Segmentation Offload),如果是 GSO 的话就通过fec_enet_txq_submit_tso 函数发送,如果不是的话就通过 fec_enet_txq_submit_skb 发送。这里简
单讲一下 TSO 和 GSO:
TSO:全称是 TCP Segmentation Offload,利用网卡对大数据包进行自动分段处理,降低 CPU负载。
GSO:全称是 Generic Segmentation Offload,在发送数据之前先检查一下网卡是否支持 TSO,如果支持的话就让网卡分段,不过不支持的话就由协议栈进行分段处理,分段处理完成以后再
交给网卡去发送。
第 21 行,通过 fec_enet_get_free_txdesc_num 函数获取剩余的发送描述符数量。
第 23 行,如果剩余的发送描述符的数量小于设置的阈值(tx_stop_threshold)的话就调用函数netif_tx_stop_queu 来暂停发送,通过暂停发送来通知应用层停止向网络发送 skb,发送中断中会重新开启的。
fec_enet_interrupt 中断服务函数
前面说了 I.MX6ULL 的网络数据接收采用 NAPI 框架,所以肯定要用到中断。 fec_probe 函数会初始化网络中断,中断服务函数为 fec_enet_interrupt,函数内容如下:
1 static irqreturn_t fec_enet_interrupt(int irq, void *dev_id)
2 {
3 struct net_device *ndev = dev_id;
4 struct fec_enet_private *fep = netdev_priv(ndev);
5 uint int_events;
6 irqreturn_t ret = IRQ_NONE;
7
8 int_events = readl(fep->hwp + FEC_IEVENT);
9 writel(int_events, fep->hwp + FEC_IEVENT);
10 fec_enet_collect_events(fep, int_events);
11
12 if ((fep->work_tx || fep->work_rx) && fep->link) {
13 ret = IRQ_HANDLED;
14
15 if (napi_schedule_prep(&fep->napi)) {
16 /* Disable the NAPI interrupts */
17 writel(FEC_ENET_MII, fep->hwp + FEC_IMASK);
18 __napi_schedule(&fep->napi);
19 }
20 }
21
22 if (int_events & FEC_ENET_MII) {
23 ret = IRQ_HANDLED;
24 complete(&fep->mdio_done);
25 }
26
27 if (fep->ptp_clock)
28 fec_ptp_check_pps_event(fep);
29
30 return ret;
31 }可以看出中断服务函数非常短!而且也没有见到有关数据接收的处理过程,那是因为I.MX6ULL 的网络驱动使用了 NAPI,具体的网络数据收发是在 NAPI 的 poll 函数中完成的,中断里面只需要进行 napi 调度即可,这个就是中断的上半部和下半部处理机制。
第 8 行,读取 NENT 的中断状态寄存器 EIR,获取中断状态。
第 9 行,将第 8 行获取到的中断状态值又写入 EIR 寄存器,用于清除中断状态寄存器。
第 10 行,调用 fec_enet_collect_events 函数统计中断信息,也就是统计都发生了哪些中断。fep 中成员变量 work_tx 和 work_rx 的 bit0、 bit1 和 bit2 用来做不同的标记, work_rx 的 bit2 表示接收到数据帧, work_tx 的 bit2 表示发送完数据帧。
第 15 行,调用 napi_schedule_prep 函数检查 NAPI 是否可以进行调度。
第 17 行,如果使能了相关中断就要先关闭这些中断,向 EIMR 寄存器的 bit23 写 1 即可关闭相关中断。
第 18 行,调用__napi_schedule 函数来启动 NAPI 调度,这个时候 napi 的 poll 函数就会执行,在本网络驱动中就是 fec_enet_rx_napi 函数。
fec_enet_rx_napi函数
fec_enet_init 函数初始化网络的时候会调用 netif_napi_add 来设置 NAPI 的 poll 函数为fec_enet_rx_napi,函数内容如下:
1 static int fec_enet_rx_napi(struct napi_struct *napi, int budget)
2 {
3 struct net_device *ndev = napi->dev;
4 struct fec_enet_private *fep = netdev_priv(ndev);
5 int pkts;
6
7 pkts = fec_enet_rx(ndev, budget);
8
9 fec_enet_tx(ndev);
10
11 if (pkts < budget) {
12 napi_complete(napi);
13 writel(FEC_DEFAULT_IMASK, fep->hwp + FEC_IMASK);
14 }
15 return pkts;
16 }第 7 行,调用 fec_enet_rx 函数进行真正的数据接收。
第 9 行,调用 fec_enet_tx 函数进行数据发送。
第 12 行,调用 napi_complete 函数来宣布一次轮询结束。
第 13 行,设置 ENET 的 EIMR 寄存器,重新使能中断。
PHY 子系统与 MDIO 总线
上一小节在讲解 MDIO 总线的时候讲过,注册 MDIO 总线的时候也会向内核注册 PHY 设备,本节我们就来简单了解一下 PHY 子系统。 PHY 子系统就是用于 PHY 设备相关内容的,分为 PHY 设备和 PHY 驱动,和 platform 总线一样, PHY 子系统也是一个设备、总线和驱动模型。
PHY 设备
首先看一下 PHY 设备, Linux 内核使用 phy_device 结构体来表示 PHY 设备,结构体定义在 include/linux/phy.h,结构体内容如下:
1 struct phy_device {
2 /* Information about the PHY type */
3 /* And management functions */
4 struct phy_driver *drv; /* PHY 设备驱动 */
5 struct mii_bus *bus; /* 对应的 MII 总线 */
6 struct device dev; /* 设备文件 */
7 u32 phy_id; /* PHY ID */
8
9 struct phy_c45_device_ids c45_ids;
10 bool is_c45;
11 bool is_internal;
12 bool has_fixups;
13 bool suspended;
14
15 enum phy_state state; /* PHY 状态 */
16 u32 dev_flags;
17 phy_interface_t interface; /* PHY 接口 */
18
19 /* Bus address of the PHY (0-31) */
20 int addr; /* PHY 地址(0~31) */
21
22 /*
23 * forced speed & duplex (no autoneg)
24 * partner speed & duplex & pause (autoneg)
25 */
26 int speed; /* 速度 */
27 int duplex; /* 双工模式 */
28 int pause;
29 int asym_pause;
30
31 /* The most recently read link state */
32 int link;
33
34 /* Enabled Interrupts */
35 u32 interrupts; /* 中断使能标志 */
36
37 /* Union of PHY and Attached devices' supported modes */
38 /* See mii.h for more info */
39 u32 supported;
40 u32 advertising;
41 u32 lp_advertising;
42 int autoneg;
43 int link_timeout;
44
45 /*
46 * Interrupt number for this PHY
47 * -1 means no interrupt
48 */
49 int irq; /* 中断号 */
50
51 /* private data pointer */
52 /* For use by PHYs to maintain extra state */
53 void *priv; /* 私有数据 */
54
55 /* Interrupt and Polling infrastructure */
56 struct work_struct phy_queue;
57 struct delayed_work state_queue;
58 atomic_t irq_disable;
59 struct mutex lock;
60 struct net_device *attached_dev; /* PHY 芯片对应的网络设备 */
61 void (*adjust_link)(struct net_device *dev);
62 };一个 PHY 设备对应一个 phy_device 实例,然后需要向 Linux 内核注册这个实例。使用phy_device_register 函数完成 PHY 设备的注册,函数原型如下:
int phy_device_register(struct phy_device *phy)函数参数和返回值含义如下:
phy: 需要注册的 PHY 设备。
返回值: 0 成功,负值 失败。
PHY 设备的注册过程一般是先调用 get_phy_device 函数获取 PHY 设备,此函数内容如下:
1 struct phy_device *get_phy_device(struct mii_bus *bus, int addr, bool is_c45)
2 {
3 struct phy_c45_device_ids c45_ids = {0};
4 u32 phy_id = 0;
5 int r;
6
7 r = get_phy_id(bus, addr, &phy_id, is_c45, &c45_ids);
8 if (r)
9 return ERR_PTR(r);
10
11 /* If the phy_id is mostly Fs, there is no device there */
12 if ((phy_id & 0x1fffffff) == 0x1fffffff)
13 return NULL;
14
15 return phy_device_create(bus, addr, phy_id, is_c45, &c45_ids);
16 }第 7 行,调用 get_phy_id 函数获取 PHY ID,也就是读取 PHY 芯片的那两个 ID 寄存器,得到 PHY 芯片 ID 信息。
第 15 行,调用 phy_device_create 函数创建 phy_device,此函数先申请 phy_device 内存,然后初始化 phy_device 的各个结构体成员,最终返回创建好的 phy_device。 phy_device_register 函数注册的就是这个创建好的 phy_device。
PHY 驱动
PHY 驱动使用结构体 phy_driver 表示,结构体也定义在 include/linux/phy.h 文件中,结构体内容如下(为了缩小篇幅,省略了注释部分):
1 struct phy_driver {
2 u32 phy_id; /* PHY ID */
3 char *name;
4 unsigned int phy_id_mask; /* PHY ID 掩码 */
5 u32 features;
6 u32 flags;
7 const void *driver_data;
8
9 int (*soft_reset)(struct phy_device *phydev);
10 int (*config_init)(struct phy_device *phydev);
11 int (*probe)(struct phy_device *phydev);
12 int (*suspend)(struct phy_device *phydev);
13 int (*resume)(struct phy_device *phydev);
14 int (*config_aneg)(struct phy_device *phydev);
15 int (*aneg_done)(struct phy_device *phydev);
16 int (*read_status)(struct phy_device *phydev);
17 int (*ack_interrupt)(struct phy_device *phydev);
18 int (*config_intr)(struct phy_device *phydev);
19 int (*did_interrupt)(struct phy_device *phydev);
20 void (*remove)(struct phy_device *phydev);
21 int (*match_phy_device)(struct phy_device *phydev);
22 int (*ts_info)(struct phy_device *phydev, struct ethtool_ts_info *ti);
23 int (*hwtstamp)(struct phy_device *phydev, struct ifreq *ifr);
24 bool (*rxtstamp)(struct phy_device *dev, struct sk_buff *skb, int type);
25 void (*txtstamp)(struct phy_device *dev, struct sk_buff *skb, int type);
26 int (*set_wol)(struct phy_device *dev, struct ethtool_wolinfo *wol);
27 void (*get_wol)(struct phy_device *dev, struct ethtool_wolinfo *wol);
28 void (*link_change_notify)(struct phy_device *dev);
29 int (*read_mmd_indirect)(struct phy_device *dev, int ptrad, int devnum, int regnum);
31 void (*write_mmd_indirect)(struct phy_device *dev, int ptrad, int devnum, int regnum, u32 val);
33 int (*module_info)(struct phy_device *dev, struct ethtool_modinfo *modinfo);
35 int (*module_eeprom)(struct phy_device *dev, struct ethtool_eeprom *ee, u8 *data);
37
38 struct device_driver driver;
39 };可以看出, phy_driver 重点是大量的函数,编写 PHY 驱动的主要工作就是实现这些函数,但是不一定全部实现,稍后我们会简单分析一下 Linux 内核通用 PHY 驱动。
①、注册 PHY 驱动
phy_driver 结构体初始化完成以后,就需要向 Linux 内核注册, PHY 驱动的注册使用phy_driver_register 函数,注册 phy 驱动时候会设置驱动的总线为 mdio_bus_type,也就是 MDIO总线,关于 MDIO 总线稍后会讲解,函数原型如下:
int phy_driver_register(struct phy_driver *new_driver)函数参数和返回值含义如下:
new_driver: 需要注册的 PHY 驱动。
返回值: 0 成功,负值 失败。
②、连续注册多个 PHY 驱动
一个厂家会生产多种 PHY 芯片,这些 PHY 芯片内部差别一般不大,如果一个个的去注册驱动将会导致一堆重复的驱动文件,因此 Linux 内核提供了一个连续注册多个 PHY 驱动的函数
phy_drivers_register。首先准备一个 phy_driver 数组,一个数组元素就表示一个 PHY 芯片的驱动,然后调用 phy_drivers_register 一次性注册整个数组中的所有驱动,函数原型如下:
int phy_drivers_register(struct phy_driver *new_driver, int n)函数参数和返回值含义如下:
new_driver: 需要注册的多个 PHY 驱动数组。
n: 要注册的驱动数量。
返回值: 0 成功,负值 失败。
②、卸载 PHY 驱动
卸载 PHY 驱动的话使用 phy_driver_unregister 函数,函数原型如下:
void phy_driver_unregister(struct phy_driver *drv)函数参数和返回值含义如下:
new_driver: 需要卸载的 PHY 驱动。
返回值: 无。
MDIO 总线
前面说了, PHY 子系统也是遵循设备、总线、驱动模型的,设备和驱动就是 phy_device 和phy_driver。总线就是 MDIO 总线,因为 PHY 芯片是通过 MIDO 接口来管理的, MDIO 总线最主要的工作就是匹配 PHY 设备和 PHY 驱动。在文件 drivers/net/phy/mdio_bus.c 中有如下定义:
1 struct bus_type mdio_bus_type = {
2 .name = "mdio_bus",
3 .match = mdio_bus_match,
4 .pm = MDIO_BUS_PM_OPS,
5 .dev_groups = mdio_dev_groups,
6 };上述代码定义了一个名为“mdio_bus_type”的总线,这个就是 MDIO 总线,总线的名字为“mdio_bus”,重点是总线的匹配函数为 mdio_bus_match。此函数内容如下:
1 static int mdio_bus_match(struct device *dev, struct device_driver *drv)
2 {
3 struct phy_device *phydev = to_phy_device(dev);
4 struct phy_driver *phydrv = to_phy_driver(drv);
5
6 if (of_driver_match_device(dev, drv))
7 return 1;
8
9 if (phydrv->match_phy_device)
10 return phydrv->match_phy_device(phydev);
11
12 return (phydrv->phy_id & phydrv->phy_id_mask) == (phydev->phy_id & phydrv->phy_id_mask);
14 }第 6 行,采用设备树的话先尝试使用 of_driver_match_device 来对设备和驱动进行匹配,也就是检查 compatible 属性值与匹配表 of_match_table 里面的内容是否一致。但是对于本章教程
而言,并不是通过 of_driver_match_device 来完成 PHY 驱动和设备匹配的。
第 9、 10 行,检查 PHY 驱动有没有提供匹配函数 match_phy_device,如果有的话就直接调用 PHY 驱动提供的匹配函数完成与设备的匹配。
第 12、 13 行,如果上面两个匹配方法都无效的话就使用最后一种, phy_driver 里面有两个成员变量 phy_id 和 phy_id_mask,表示此驱动所匹配的 PHY 芯片 ID 以及 ID 掩码, PHY 驱动
编人员需要给这两个成员变量赋值。 phy_device 也有一个 phy_id 成员变量,表示此 PHY 芯片的 ID, phy_device 里面的 phy_id 是在注册 PHY 设备的时候调用 get_phy_id 函数直接读取
PHY 芯片内部 ID 寄存器得到的!很明显 PHY 驱动和 PHY 设备中的 ID 要一样,这样才能匹配起来。所以最后一种方法就是对比 PHY 驱动和 PHY 设备中的 phy_id 是否一致,这里需要与
PHY 驱动里面的 phy_id_mask 进行与运算,如果结果一致的话就说明驱动和设备匹配。
如果 PHY 设备和 PHY 驱动匹配,那么就使用指定的 PHY 驱动,如果不匹配的话就使用Linux 内核自带的通用 PHY 驱动。
通用 PHY 驱动
前面多次提到Linux内核已经集成了通用PHY驱动,通用PHY驱动名字为“Generic PHY”,打开 drivers/net/phy/phy_device.c,找到 phy_init 函数,内容如下:
1 static int __init phy_init(void)
2 {
3 int rc;
4
5 rc = mdio_bus_init();
6 if (rc)
7 return rc;
8
9 rc = phy_drivers_register(genphy_driver, ARRAY_SIZE(genphy_driver));
11 if (rc)
12 mdio_bus_exit();
13
14 return rc;
15 }phy_init 是整个 PHY 子系统的入口函数,第 9 行会调用 phy_drivers_register 函数向内核直接注册一个通用 PHY 驱动: genphy_driver,也就是通用 PHY 驱动,也就是说 Linux 系统启动以后默认就已经存在了通用 PHY 驱动。genphy_driver 是一个数组,有两个数组元素,表示有两个通用的 PHY 驱动,一个是针对10/100/1000M 网络的,一个是针对 10G 网络的。genphy_driver 定义在 drivers/net/phy/phy_device.c里面,内容如下:
1 static struct phy_driver genphy_driver[] = {
2 {
3 .phy_id = 0xffffffff,
4 .phy_id_mask = 0xffffffff,
5 .name = "Generic PHY",
6 .soft_reset = genphy_soft_reset,
7 .config_init = genphy_config_init,
8 .features = PHY_GBIT_FEATURES | SUPPORTED_MII |
9 SUPPORTED_AUI | SUPPORTED_FIBRE |
10 SUPPORTED_BNC,
11 .config_aneg = genphy_config_aneg,
12 .aneg_done = genphy_aneg_done,
13 .read_status = genphy_read_status,
14 .suspend = genphy_suspend,
15 .resume = genphy_resume,
16 .driver = { .owner = THIS_MODULE, },
17 }, {
18 .phy_id = 0xffffffff,
19 .phy_id_mask = 0xffffffff,
20 .name = "Generic 10G PHY",
21 .soft_reset = gen10g_soft_reset,
22 .config_init = gen10g_config_init,
23 .features = 0,
24 .config_aneg = gen10g_config_aneg,
25 .read_status = gen10g_read_status,
26 .suspend = gen10g_suspend,
27 .resume = gen10g_resume,
28 .driver = {.owner = THIS_MODULE, },
29 } };genphy_driver 数组有两个元素, genphy_driver[0]为 10/100/1000M 的 PHY 驱动,名字为“Generic PHY”, genphy_driver[1]为 10G 的 PHY 驱动,名字为“Generic 10G PHY”。注意,很多另外编写的 PHY 驱动也会用到通用 PHY 驱动的一些函数,比如正点原子 ALPHA 开发板所用的 LAN8720A 是 SMSC 公司的产品,此公司针对自家的所有 PHY 芯片编写了一个驱动文件smsc.c,这驱动文件里面用到了大量的通用 PHY 驱动相关函数。
LAN8720A 驱动
最 后 我 们 来 看 一 下 LAN8720A 的 Linux 驱 动 , LAN8720A 的 驱 动 文 件 为drivers/net/phy/smsc.c,这个文件是 SMSC 针对自家的一些 PHY 芯片编写的驱动文件,其中就包含了 LAN8720A 这个 PHY 芯片。默认情况下, LAN8720A 这个驱动是没有打开的,我们需要配置 linux 内核,打开此驱动选项,配置路径如下:
-> Device Drivers
-> Network device support
-> PHY Device support and infrastructure
-> Drivers for SMSC PHYs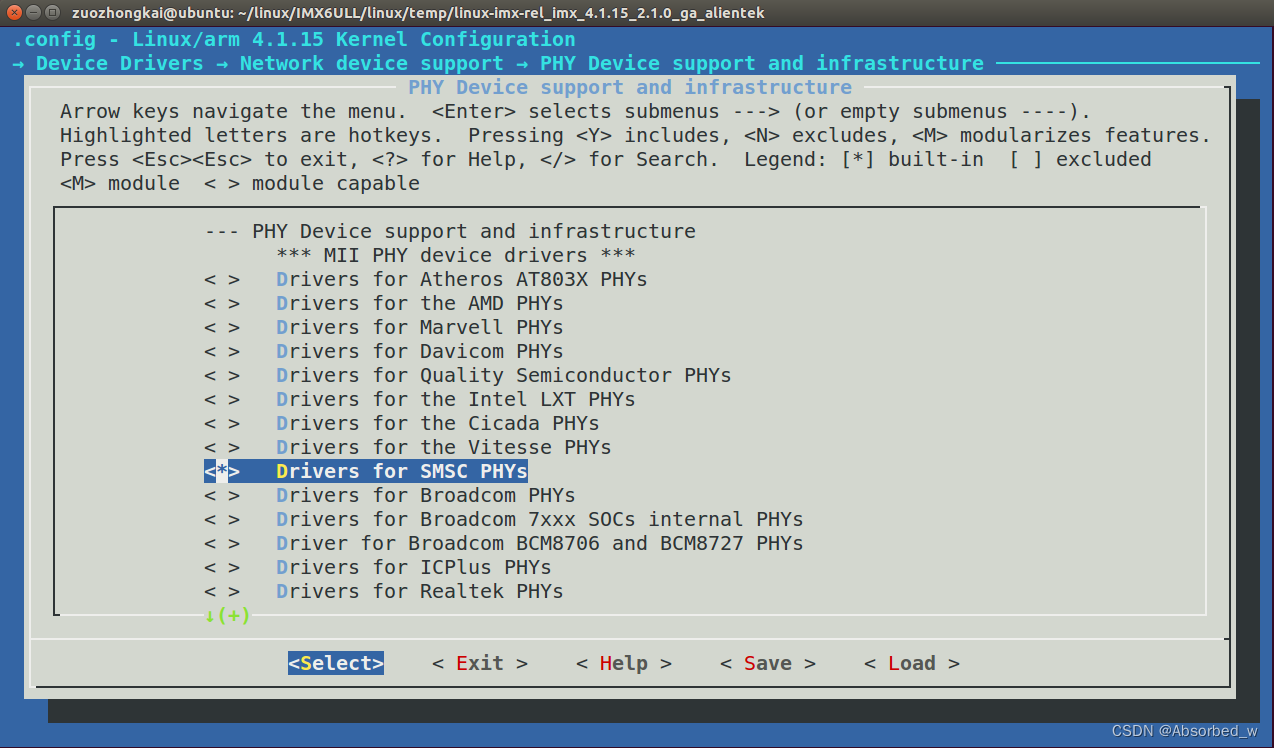
选中图中的“Drivers for SMSC PHYs”,然后编译内核即可,打开 smsc.c,找到如下所示内容(限于篇幅,有删减):
1 static struct phy_driver smsc_phy_driver[] = {
2 {
3 .phy_id = 0x0007c0a0, /* OUI=0x00800f, Model#=0x0a */
4 .phy_id_mask = 0xfffffff0,
5 .name = "SMSC LAN83C185",
......
24 .driver = { .owner = THIS_MODULE, }
25 }, {
26 .phy_id = 0x0007c0b0, /* OUI=0x00800f, Model#=0x0b */
27 .phy_id_mask = 0xfffffff0,
28 .name = "SMSC LAN8187",
......
47 .driver = { .owner = THIS_MODULE, }
48 }, {
49 .phy_id = 0x0007c0c0, /* OUI=0x00800f, Model#=0x0c */
50 .phy_id_mask = 0xfffffff0,
51 .name = "SMSC LAN8700",
......
70 .driver = { .owner = THIS_MODULE, }
71 }, {
72 .phy_id = 0x0007c0d0, /* OUI=0x00800f, Model#=0x0d */
73 .phy_id_mask = 0xfffffff0,
74 .name = "SMSC LAN911x Internal PHY",
......
92 .driver = { .owner = THIS_MODULE, }
93 }, {
94 .phy_id = 0x0007c0f0, /* OUI=0x00800f, Model#=0x0f */
95 .phy_id_mask = 0xfffffff0,
96 .name = "SMSC LAN8710/LAN8720",
97
98 .features = (PHY_BASIC_FEATURES | SUPPORTED_Pause
99 | SUPPORTED_Asym_Pause),
100 .flags = PHY_HAS_INTERRUPT | PHY_HAS_MAGICANEG,
101
102 /* basic functions */
103 .config_aneg = genphy_config_aneg,
104 .read_status = lan87xx_read_status,
105 .config_init = smsc_phy_config_init,
106 .soft_reset = smsc_phy_reset,
107
108 /* IRQ related */
109 .ack_interrupt = smsc_phy_ack_interrupt,
110 .config_intr = smsc_phy_config_intr,
111
112 .suspend = genphy_suspend,
113 .resume = genphy_resume,
114
115 .driver = { .owner = THIS_MODULE, }
116 } };
117
118 module_phy_driver(smsc_phy_driver);从示例代码可以看出, smsc_phy_driver 还是支持了不少 SMSC 家的 PHY 芯片,比如 LAN83C185、 LAN8187、 LAN8700 等等,当然了,肯定也包括了 LAN8720 系列,第 93~116
行就是 LAN8710/LAN8720 系列 PHY 驱动。
第 94 行, PHY ID 为 0X0007C0F0。
第 95 行, PHY 的 ID 掩码为 0XFFFFFFF0,也就是前 28 位有效,在进行匹配的时候只需
要比较前 28 位,低 4 位不用比较。
第 74 行,驱动名字为“SMSC LAN8710/LAN8720”,系统启动以后,打开网卡就会提示当前 PHY 驱动名字为“SMSC LAN8710/LAN8720”。
最后,第 118 行使用 module_phy_driver(本质是一个宏)来完成 smsc_phy_driver 的注册。此驱动里面的成员函数有一些是 SMSC 自己编写的,有一些是直接用的通用 PHY 驱动的,
比如第 103 行的 genphy_config_aneg、第 112 行的 genphy_suspend 等。