无人问津也好,技不如人也罢,都应静下心来,去做该做的事。
最近在学STM32,所以也开贴记录一下主要内容,省的过目即忘。视频教程为江科大(改名江协科技),网站jiangxiekeji.com
现在开始上难度,STM32功能最强大、结构最复杂的外设——定时器,分四期介绍。
第一期介绍最基础的定时功能理论、定时器中断和定时器内外时钟源选择的代码。
第二期介绍定时器输出比较功能的代码,输出比较功能常用产生PWM波驱动电机。
上期介绍定时器输入捕获功能代码,常用测量方波频率。
最后介绍定时器的编码器接口,更方便读取正交编码器的输出波形,常用编码电机测速。
编码器接口简介
本质上也是旋转编码器计次,只不过是通过定时器的编码器接口,来自动计次。而之前是通过触发外部中断,然后在中断函数里手动进行计次。使用编码器接口的好处就是节约钦件资源,如果使用外部中断来计次,那当电机高速旋转时,编码器每秒产生成干上万个脉冲,程序就得频繁进中断。然后进中断之后,完成的任务又只是简单的加一减一。所以,对于这种需要频繁执行,操作又比校简单的任务,一般都会设计一个硬件结构来完成,本期的编码器接口就是用来自动给编码器进行计次的电路。如果我们每隔一段时间取一下计次值,就能得到编码器旋转的速度了。
使用定时器的编码器接口,再配合编码器,就可以测量旋转速度和旋转方向,这里编码器测速一般应用在电机控制的项目上。使用PWM驱动电机,再使用编码器测量电机的速度,然后再用PID算法进行闭环控制,这是常用场景。一般电机旋转速度比较高,会使用无接触式的霍尔传感器或者光栅进行测速。
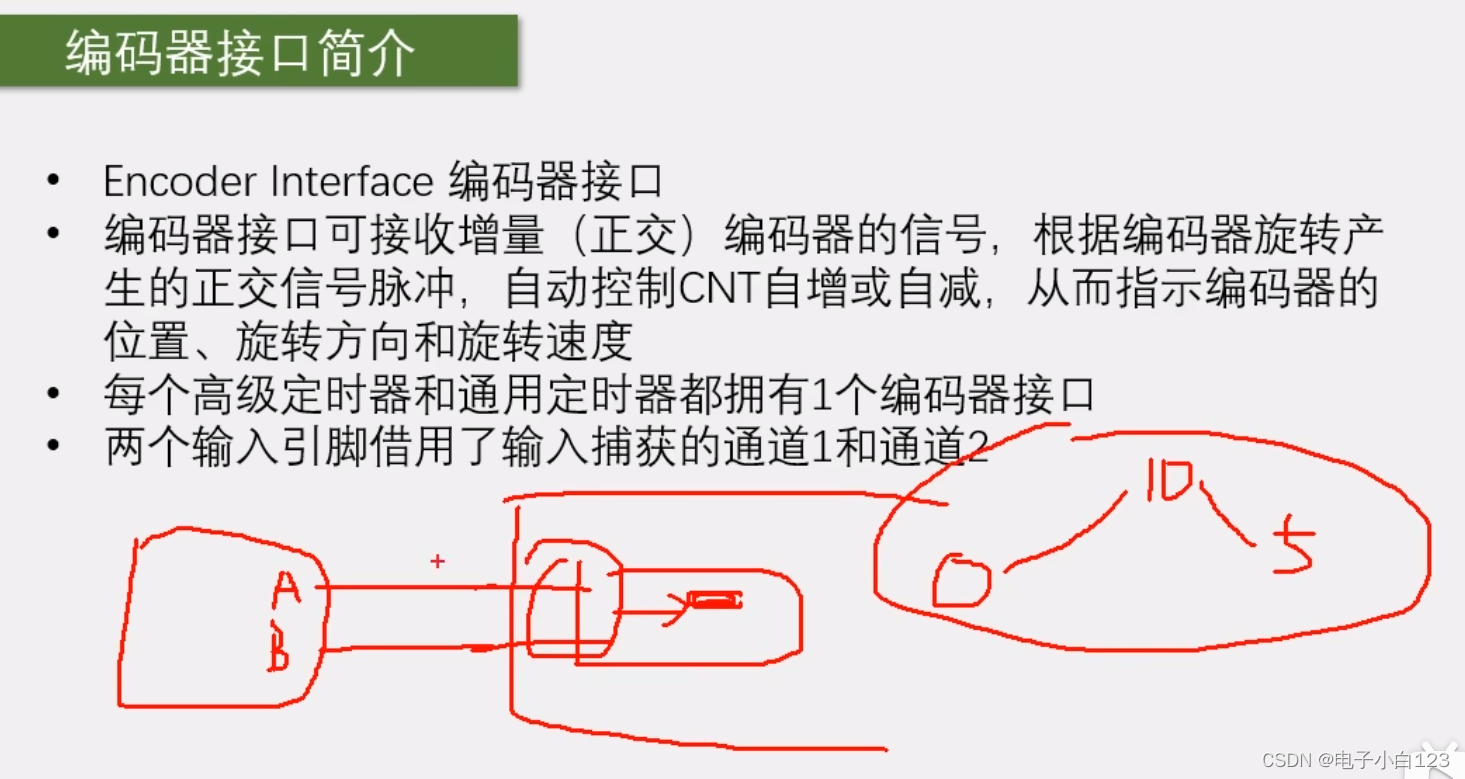
一个编码器,它有两个输出,一个是A相,一个是B相。然后接入到STM32的定时器的编码器接口,编码器接口自动控制定时器时基单元中的CNT计数器进行自增或自减。
比如初始化之后,CNT初始值为0,然后编码器右转,CNT就++,右转产生一个脉冲, CNT就加一次。比如右转产生10个脉冲后, 停下来。那么这个过程CNT就由0自增到10,停下来;编码器左转,CNT就--,左转产生一个脉冲, CNT减一次。比如编码器再左转产生5个脉冲,那CNT就在原来10的基础上自减5,停下来。这个编码器接口,其实就相当于是一个带有方向控制的外部时钟,它同时控制着CNT的计数时钟和计数方向。这样的话,CNT的值就表示了编码器的位置。如果我们每隔一段时间取一次CNT的值,再把CNT清零,每次取出来的值就表示编码器速度。
这个编码器测速实际上就是测频法测正交脉冲的频率,只不过这个编码器接口更高级,它能根据旋转方向,不仅能自增计次,还能自减计次,是带方向的测速。
一个定时器只有一个编码器接口,如果一个定时器配置成了编码器接口模式,那它就干不了其他活。我们这个C8T6芯片只有TIM1、2、3、4这4个定时器,所以最多配置四个编码器接口,而且配置完后,定时器就干不了其他活。如果编码器接口还是不够用,还可以用外部中断接编码器。
编码器接口框图
这里编码器接口有两个输入端:分别要接到编码器的A相和B相,就是TI1FP1和TI2FP2。编码器接口两个引脚借用了输入捕获单元的前两个通道,所以编码器接口的两个引脚最终就是定时器的CH1和CH2这两个引脚。其中CH1和CH2的输入捕获滤波器和边沿检测,编码器接口也有使用。
以上是编码器接口的输入部分,那编码器接口的输出部分,其实就相当于从模式控制器,去控制CNT的计数时钟和计数方向。简单来说,这里的输出执行流程是:按照我们下面总结的那个正交编码器的表,如果出现了边沿信号并且对应另一相的状态为正转,则控制CNT自增;否则控制CNT自减。当然这时我们TIM定时器使用的72M内部时钟和在时基单元初始化时设置的计数方向,并不会使用,因为此时计数时钟和计数方向都处于编码器接口托管的状态。

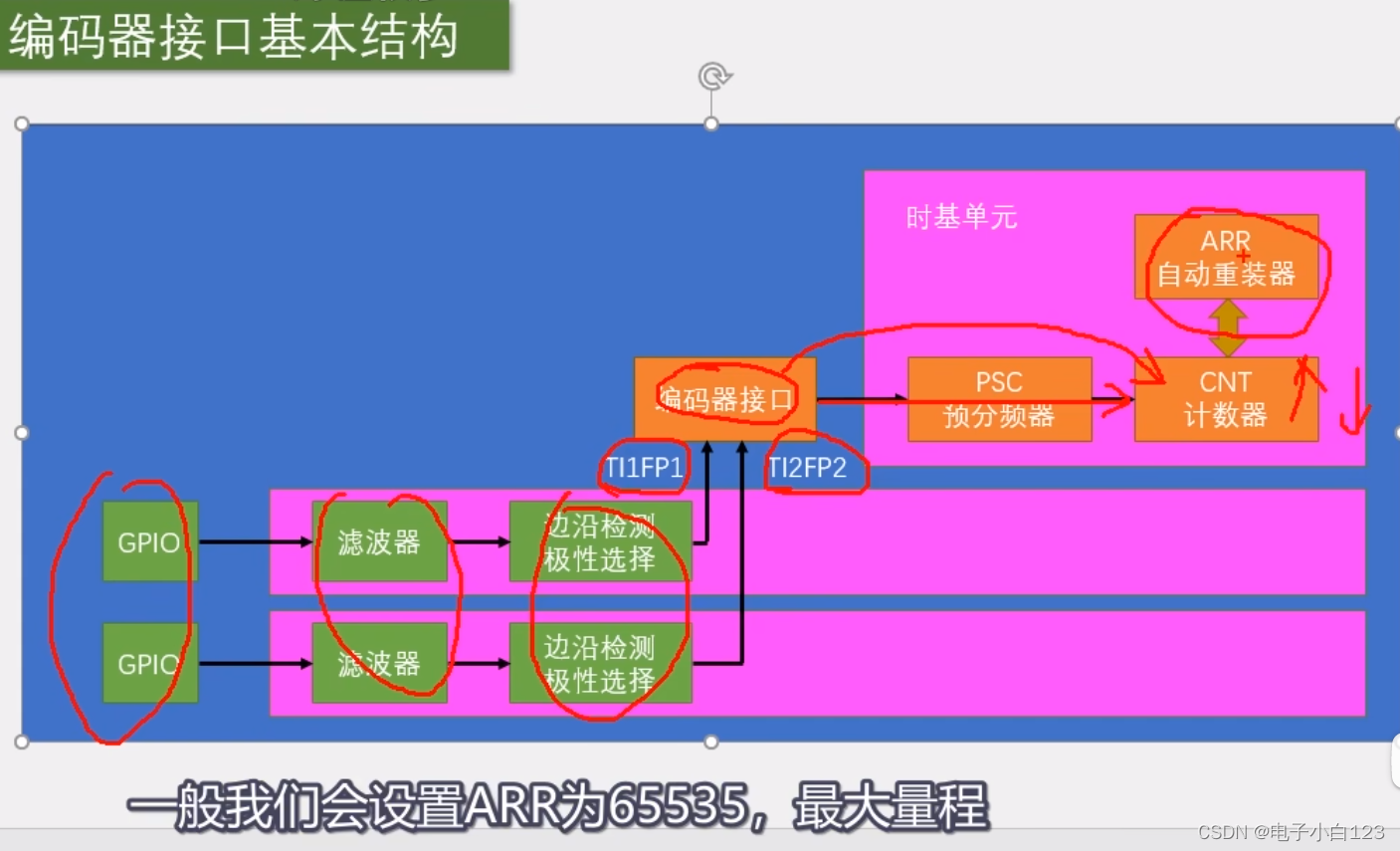
编码器接口基本结构
输入捕获的前两个通道,通过GPIO口接入编码器的A、B相,然后通过滤波器、边沿检测、极性选择,产生TI1FP1和TI2FP2,通向编码器接口,编码器接口通过预分频器控制CNT计数器的时钟,同时,编码器接口还根据编码器的旋转方向,控制CNT的计数方向,编码器正转时,CNT自增, 编码器反转时,CNT自减。
另外这里ARR也是有效的,一般我们会设置ARR为65535,最大量程,这样的话,利用补码的特性,很容易得到负数。比如CNT初始为0,我正转,CNT自增,0、1、2、3、4、5、6、7等等;但是我反转呢,CNT自减,0下一个数就是65535、65534、65533等等,根据补码的定义,65535=-1,65534=-2
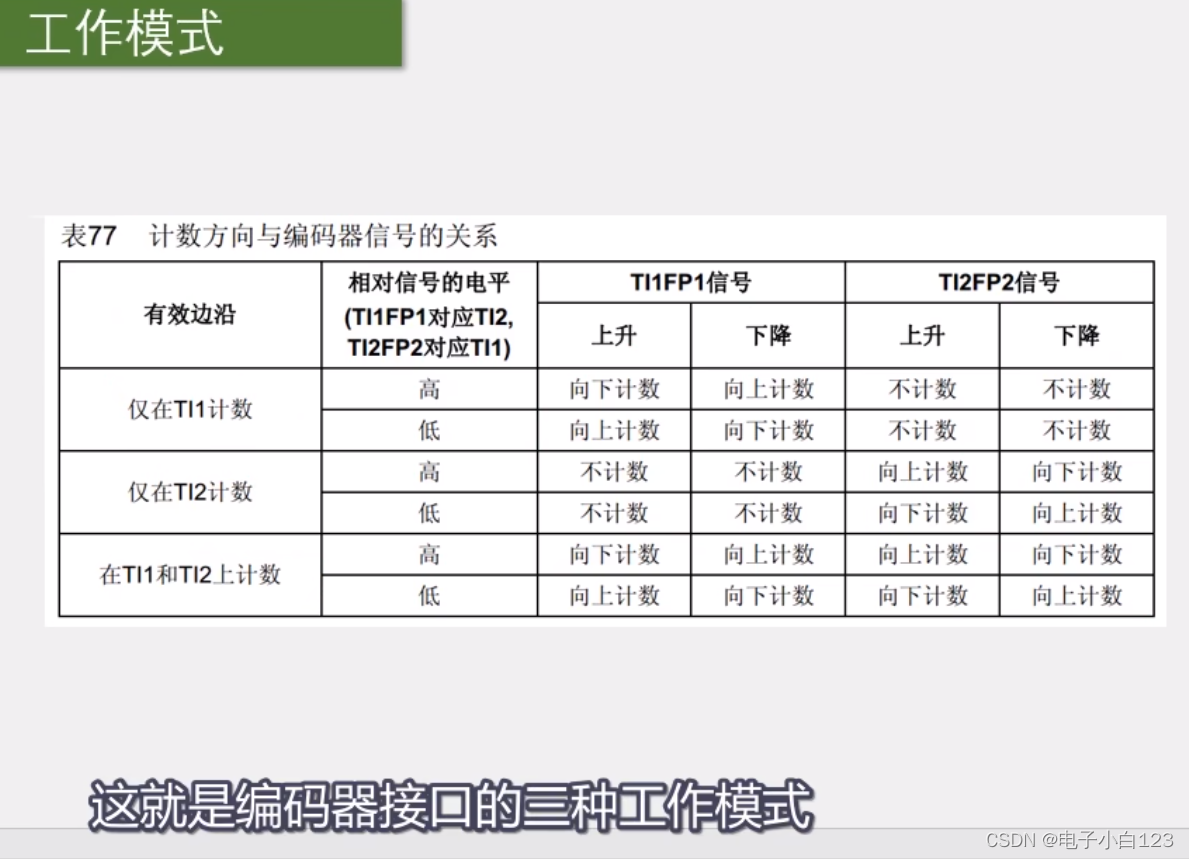
工作模式
一般用第三种,在TI1和TI2上计数,这个模式精度最高,而且该模式下,正转的状态都向上计数,反转的状态都向下计数
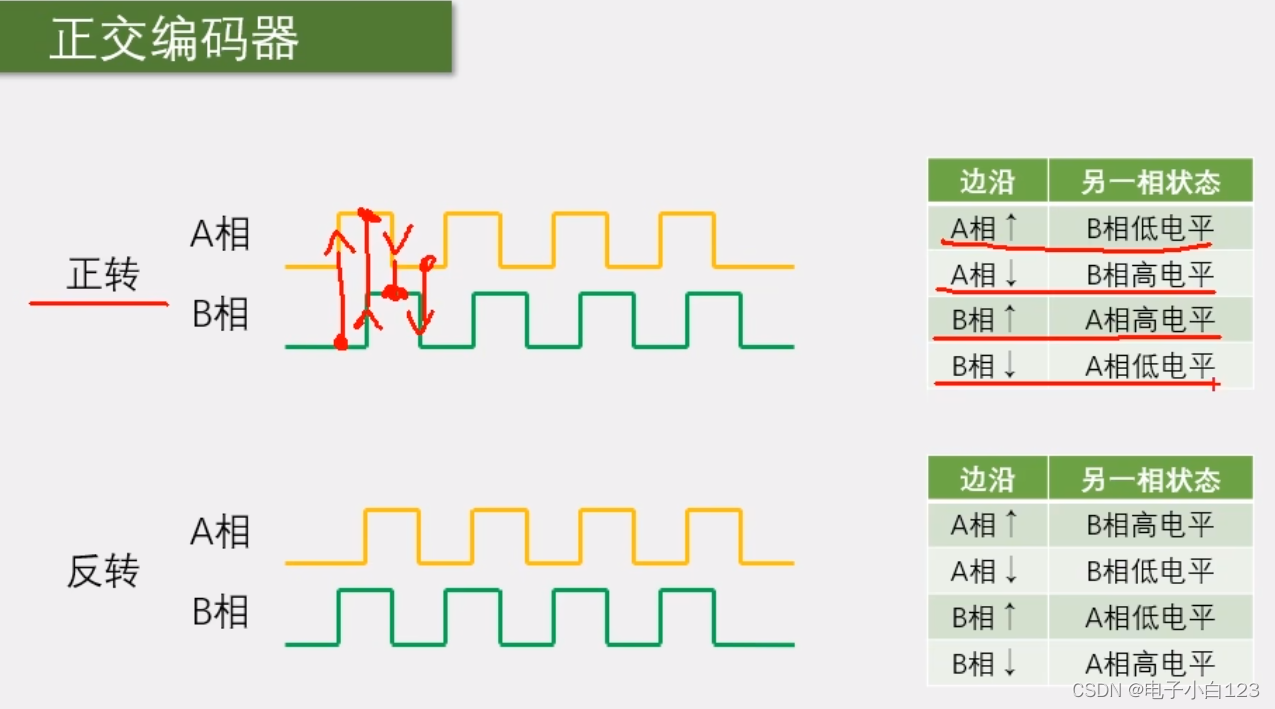
正交编码器
就是像这样,输出的两个方波信号,相位相差90度,超前90度或者滞后90度,分别代表正转和反转。
正交编码器如何计次和分辨方向?
先看正转波形,第一个时刻,A相上升沿,对应B相此时是低电平,也就是表里的第一行。继续第二个时刻,B相上升沿,对应A相高电平,是表里的第三行。继续第三个时刻,A相下降沿,对应B相高电平,是表里的第二行。最后是,B相下降沿,对应A相低电平,是表里第四行。所以在正转的时候,我们总结了右边这个表。出现这些边沿时,对应另一相的状态是这4种。反转时状态刚好都相反。
所以我们编码器接口的设计逻辑就是:首先把A相和B相的所有边沿作为计数器的计数时钟,出现边沿信号时,就计数自增或自减。那增还是减呢?这个计数的方向由另一相的状态来确定。当出现某个边沿时,我们判断另一相的高低电平,如果对应另一相的状态出现在上面这个表里,那就是正转,计数自增;反之出现在下面表里就是反转,计数自减。这样就能实现编码器接口功能,这也是STM32定时器编码器接口的执行逻辑。
实例(TI1和TI2均不反相)
比如你接一个编码器,发现它数据的加减方向反了,你想要正转的方向,结果它自减了,这时,就可以调整一下极性,把任意一个引脚(TI1或TI2)反相,就能反转计数方向了或者直接把A、B相引脚交换。
这个图展示了,什么时候向上计数,什么时候向下计数,以及正交编码器抗噪声的原理。

旋转编码器简介
第一个是只有一个光栅加红外对管的编码器,这只能输出一个方波信号,并不是正交编码器,只能测速度。
第二、三个就是套件使用的编码器,里面靠两个金属触点交替导通。可以输出A相和B相两个正交信号,是正交编码器。这里有4个引脚,上面两个是供电的正极和负极,下面两个是A相和B相的输出。
第四个图是电机后面自带的一个编码器,电机旋转带动中间的磁铁旋转,两个霍尔传感器90度放置,最终输出A相和B相两个正交信号,是正交编码器。下面一般都六根线,最左和最右是直接接到电机的,然后是靠里一些的两根是编码器电源,最中间的两根就是A相和B相的输出了。
最后一个图是单独的编码器元件,一般都是正交编码器,当然也有的不是,需看商品说明,一般有六根线,两个是编码器电源,两个是A、B相,一般还有个编码器0位置的输出,也就是Z相。0位置就是编码器每转到一个固定位置时,输出一个脉冲。一般应用于位置测量,校淮0位置用的。最后还有一个NC脚。

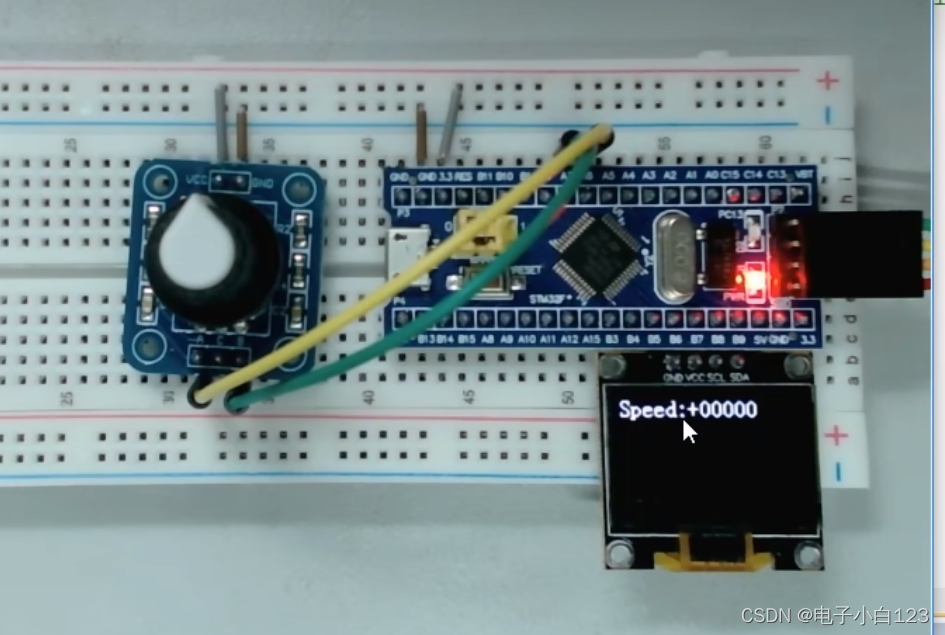
编码器接口程序测速现象
在这里接了一个旋转编码器模块,这个代码和之前我们写的旋转编码器计次的代码,实现的功能基本都是一样的。OLED显示的是Speed速度,向右慢速旋转,数值为正,计次比较小。向右快速旋转,计次就会增大;然后向左慢速旋转,数值为负,计次比较小;然后停下来,速度就是0。