串口基本认识
串行接口简称串口,也称串行通信接口或串行通讯接口(通常指COM接口),是采用串行通信方
式的扩展接口。串行接口(Serial Interface)是指数据一位一位地顺序传送。其特点是通信线路简
单,只要一对传输线就可以实现双向通信(可以直接利用电话线作为传输线),从而大大降低了成
本,特别适用于远距离通信,但传送速度较慢
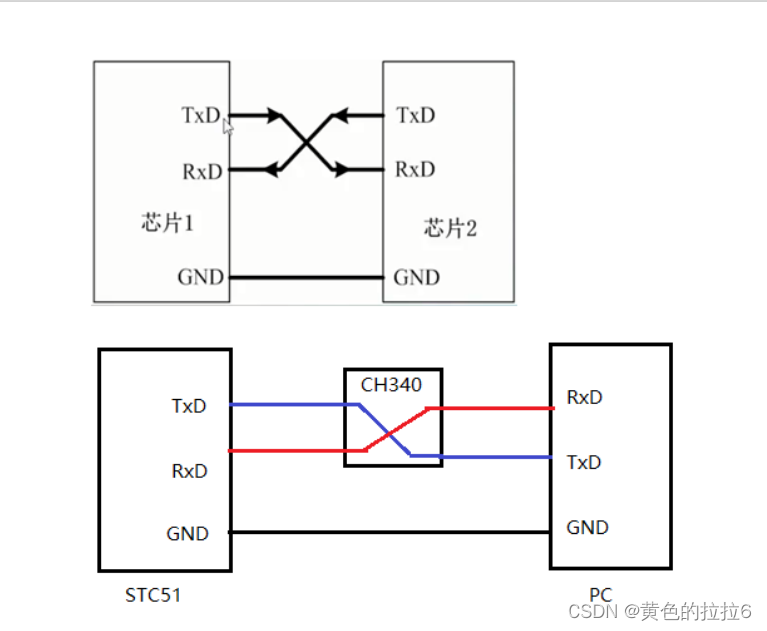
串口接线方式
- RXD:数据输入引脚,数据接受;STC89系列对应P3.0口。
TXD:数据发送引脚,数据发送;STC89系列对应P3.1口。
接线方式
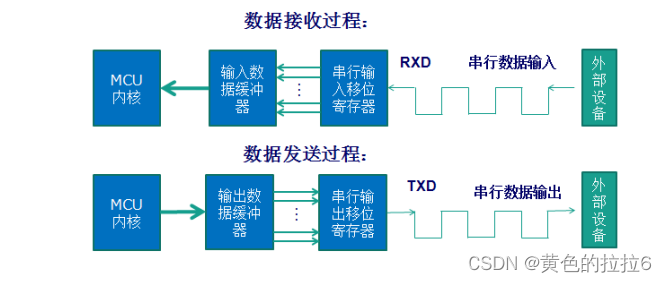
串口编程要素
输入/输出数据缓冲器都叫做SBUF, 都用99H地址码,但是是两个独立的8位寄存器
代码体现为: 想要接收数据 char data = SBUF 想要发送数据 SBUF = data
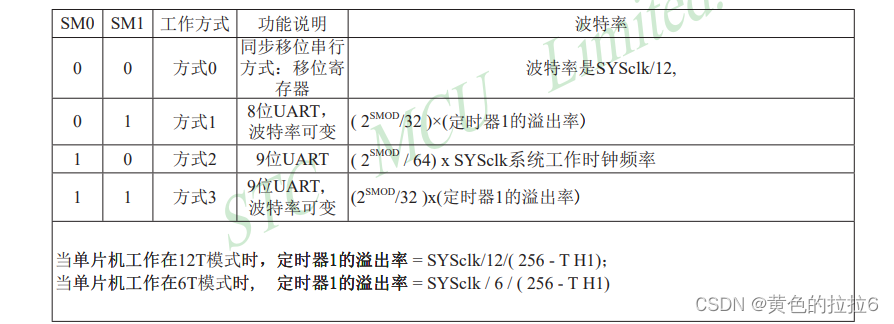
回忆UART是异步串行接口,通信双方使用时钟不同,因为双方硬件配置不同,但是需要约定通信
速度,叫做波特率
对于电脑来说,别人做好了软件,鼠标点点点就能配置好,而苦逼单片机的波特率配置需要我们写
代码
点点点配置什么,我们代码也要配置对应参数。
51发送字符到PC
SCON
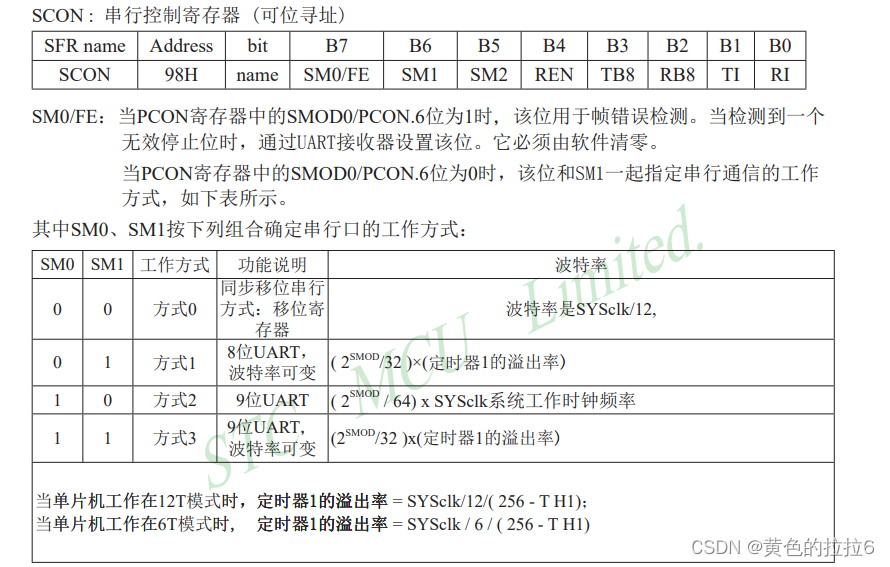

选择SM0和SM1为01,工作模式为方式一,
REN = 0,禁止接收
REN = 1,允许接收
SCON = 0100 0000; //禁止接收
SCON = 0101 0000; //允许接收
PCON
PCON &= 0x7F;//0111 1111 按位与将SMOD设置为0。
AUXR

TMOD
目标:0010 xxxx
TMOD &= 0x0F; //先将高位清零,低位不变
TMOD |= 0x20; //0010 xxxx
TH1
TH1 = 0xFD; //smod = 0 9600 = (2^smod) / 32 x 11059200 / 12/(256 - THL)
TL1 = 0xFD; // THL = 253 = FD(HEX)
代码实现
#include "reg52.h"
#include "intrins.h"
sfr AUXR = 0x8E;
void Delay250ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 2;
j = 193;
k = 57;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void UartInit(void) //9600bps@11.0592MHz
{
PCON &= 0x7F;
SCON = 0x50;
AUXR &= 0xBF;
AUXR &= 0xFE;
TMOD &= 0x0F;
TMOD |= 0x20;
TL1 = 0xFD;
TH1 = 0xFD;
ET1 = 0;
TR1 = 1;
}
void my_UartInit()
{
SCON = 0x40;//选择SM0和SM1为01,工作模式为方式一,SCON = 0100 0000;
PCON &= 0x7F;//0111 1111 按位与将SMOD设置为0
AUXR |= 0x01;//0000 0001
TMOD &= 0x0F;//目标:0010 xxxx //先将高位清零,低位不变
TMOD |= 0x20;//0010 xxxx
TH1 = 0xFD; //smod = 0 9600 = (2^smod) / 32 x 11059200 / 12 /(256 - THL)
TL1 = 0xFD; //THL = 253 = FD(HEX)
ET1 = 0;//禁止定时器1中断
TR1 = 1;//启动定时器1
}
void main()
{
char msg_data = 's';
my_UartInit();
while(1)
{
Delay250ms();
SBUF = msg_data;
}
}
51发字符串给PC
#include "reg52.h"
#include "intrins.h"
sfr AUXR = 0x8E;
void Delay250ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 2;
j = 193;
k = 57;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void UartInit(void) //9600bps@11.0592MHz
{
PCON &= 0x7F;
SCON = 0x50;
AUXR &= 0xBF;
AUXR &= 0xFE;
TMOD &= 0x0F;
TMOD |= 0x20;
TL1 = 0xFD;
TH1 = 0xFD;
ET1 = 0;
TR1 = 1;
}
void my_UartInit()
{
SCON = 0x40;//选择SM0和SM1为01,工作模式为方式一,SCON = 0100 0000;
PCON &= 0x7F;//0111 1111 按位与将SMOD设置为0
AUXR |= 0x01;//0000 0001
TMOD &= 0x0F;//目标:0010 xxxx //先将高位清零,低位不变
TMOD |= 0x20;//0010 xxxx
TH1 = 0xFD; //smod = 0 9600 = (2^smod) / 32 x 11059200 / 12 /(256 - THL)
TL1 = 0xFD; //THL = 253 = FD(HEX)
ET1 = 0;//禁止定时器1中断
TR1 = 1;//启动定时器1
}
void sendByte(char msg_data)
{
SBUF = msg_data;
while(TI == 0);//结束TI=1,TI==0为假
TI = 0;
}
void sendString(char *str)
{
while(*str != '\0')
{
sendByte(*str);
str++;
}
}
void main()
{
my_UartInit();
while(1)
{
Delay250ms();
sendString("hello world!\r\n");
}
}
51接收PC发送的字符,达到点灯关灯的目的
#include "reg52.h"
#include "intrins.h"
sbit led1 = P3^7;
sfr AUXR = 0x8E;
char cmd;
void Delay250ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 2;
j = 193;
k = 57;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void UartInit(void) //9600bps@11.0592MHz
{
PCON &= 0x7F;
SCON = 0x50;
AUXR &= 0xBF;
AUXR &= 0xFE;
TMOD &= 0x0F;
TMOD |= 0x20;
TL1 = 0xFD;
TH1 = 0xFD;
ET1 = 0;
TR1 = 1;
}
void my_UartInit()
{
SCON = 0x50;//选择SM0和SM1为01,工作模式为方式一,SCON = 0101 0000; 允许接收
PCON &= 0x7F;//0111 1111 按位与将SMOD设置为0
AUXR |= 0x01;//0000 0001
TMOD &= 0x0F;//目标:0010 xxxx //先将高位清零,低位不变
TMOD |= 0x20;//0010 xxxx
TH1 = 0xFD; //smod = 0 9600 = (2^smod) / 32 x 11059200 / 12 /(256 - THL)
TL1 = 0xFD; //THL = 253 = FD(HEX)
ET1 = 0;//禁止定时器1中断
TR1 = 1;//启动定时器1
}
void sendByte(char msg_data)
{
SBUF = msg_data;
while(TI == 0);//结束时TI=1,TI == 0 为假
TI = 0;
}
void sendString(char *str)
{
while(*str != '\0')
{
sendByte(*str);
str++;
}
}
void main()
{
my_UartInit();
led1 = 1;
while(1)
{
Delay250ms();
sendString("hello world!\r\n");
}
}
void UartHandler() interrupt 4
{
if(RI)
{
RI = 0;
cmd = SBUF;
if(cmd == 'o')
{
led1 = 0;
}
if(cmd == 'c')
{
led1 = 1;
}
}
if(TI)
{
}
}
51接收PC发送的字符串,达到点灯关灯的目的
#include "reg52.h"
#include "intrins.h"
#include "string.h"
sbit led1 = P3^7;
sfr AUXR = 0x8E;
char cmd[12] = {'\0'};
void Delay250ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 2;
j = 193;
k = 57;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void UartInit(void) //9600bps@11.0592MHz
{
PCON &= 0x7F;
SCON = 0x50;
AUXR &= 0xBF;
AUXR &= 0xFE;
TMOD &= 0x0F;
TMOD |= 0x20;
TL1 = 0xFD;
TH1 = 0xFD;
ET1 = 0;
TR1 = 1;
}
void my_UartInit()
{
SCON = 0x50;//选择SM0和SM1为01,工作模式为方式一,SCON = 0101 0000; 允许接收
PCON &= 0x7F;//0111 1111 按位与将SMOD设置为0
AUXR |= 0x01;//0000 0001
TMOD &= 0x0F;//目标:0010 xxxx //先将高位清零,低位不变
TMOD |= 0x20;//0010 xxxx
TH1 = 0xFD; //smod = 0 9600 = (2^smod) / 32 x 11059200 / 12 /(256 - THL)
TL1 = 0xFD; //THL = 253 = FD(HEX)
ET1 = 0;//禁止定时器1中断
TR1 = 1;//启动定时器1
}
void sendByte(char msg_data)
{
SBUF = msg_data;
while(TI == 0);//结束TI=1,TI==0为假
TI = 0;
}
void sendString(char *str)
{
while(*str != '\0')
{
sendByte(*str);
str++;
}
}
void main()
{
my_UartInit();
led1 = 1;
while(1)
{
Delay250ms();
sendString("hello world!\r\n");
}
}
void UartHandler() interrupt 4
{
static int i = 0;//静态变量 只被初始化一次
if(RI)//中断处理函数中,对于接收中断的响应
{
RI = 0;//清除接收中断标志位
cmd[i] = SBUF;
i++;
if(strstr(cmd,"open"))
{
led1 = 0;
i = 0;
memset(cmd,'\0',12);
}
if(strstr(cmd,"close"))
{
led1 = 1;
i = 0;
memset(cmd,'\0',12);
}
}
if(TI)
{
}
}